
EKF based Data Fusion using Interval Analysis via Covariance
Intersection, ML and a Class of OGK Covariance Estimators
Samuel B. Lazarus
1
, Antonios Tsourdos
1
, Jo˜ao Sequeira
2
and Al Savvaris
1
1
Cranfield University, Cranfield, U.K.
2
Instituto Superior T´ecnico, Lisboa, Portugal
Keywords:
Multiple Sensor Fusion, Data Fusion, EKF based Navigation, Interval Analysis (IA), Robust Navigation,
Covariance Intersection (CI), Maximum Likelihood (ML), Orthogonal Gnanadesikan-Kettenring (OGK).
Abstract:
This paper addresses the comparison of robust estimation of a covariance matrix in vehicle navigation task to
express the uncertainty when fusing information from multiple sensors. The EKF estimates are fused with the
Interval Analysis estimates and further the results are fused using the Covariance Intersection (CI), Maximum
Likelihood (ML) and a class of Orthogonal Gnanadesikan-Kettenring (OGK) estimators. The simulation re-
sults presented show that the variation between CI and OGK and the correlation between sensors are significant
in the presence of outliers.
1 INTRODUCTION
The data fusion from any two different sources is tra-
ditionally used to increase the accuracy of the mea-
surement being performed, and to overcome unrelia-
bility in sensors or uncertainty in sensor outputs, so
that the resulting information is more accurate, more
complete and reliable to the result of an emerging
view (Carvalho and Rezende, 2004). The data fusion
technique is claimed to be applicable to the fusion of
sensor measurements, data estimates, or similar quan-
tities that can be described in terms of a Gaussian
probability density function. The Covariance Inter-
section technique is related to a more general data fu-
sion technique that can fuse with any pair of probabil-
ity density functions. The principal application of Co-
variance Intersection is an adjunct to Kalman filters
where there is the potential for the data to be highly
correlated. Hence fusion can reduce the system’s de-
pendence on invalid prior assumptions and make the
system more robust.
Many researchers have proposed their algorithms
by combining different sources of sensors. Smooth-
ing approaches are also used as a viable alternative
to extended Kalman filter (EKF)- based solutions. In
particular, approaches have been looked at as that fac-
torize either the associated information matrix or the
measurement Jacobian into square root form. Such
techniques have several significant advantages over
the EKF: they are faster yet exact; and yield the en-
tire robot trajectory at lower cost for a large class
of SLAM problems. Mixing the information from
diverse sources, which are obtained with a differ-
ent confidence degree, is at the core of a multiple
of problems in robotics. Multiple techniques for in-
formation fusion have been in use for many years
in robotics, ranging from the deterministic EKF to
the stochastic approaches using particle filters (for
instance (Montemerlo et al., 2002), (Mourikis and
Roumeliotis, 2006), (Vadakkepat and Jing, 2006),
(Walter and Leonard, 2004)). At the output of the
fusion process, a covariance matrix that expresses the
variances of the estimation error along with the differ-
ent degrees of freedom is produced.
In this paper the first mile stone is achieved by
fusing the covariance matrix of the EKF estimates
(Time Update step) with the Interval position of the
vehicle to improve the sensor uncertainties in esti-
mating the vehicle’s accurate position. Then the Co-
variance Intersection (CI) algorithm given in (Julier
and Uhlmann, 1997), (Ashokaraj et al., 2009) is
used here as a data fusion algorithm as described
in (Lazarus et al., 2008). It is further extended by
employing a different data fusion estimators such as
Maximum Likelihood (ML) and a class of Orthogo-
nal Gnanadesikan-Kettenring (OGK) estimators from
(Gnanadesikan and Kettenring, 1972). The obtained
results are compared with one another and the change
in uncertainty levels between the resultant covariance
matrix of each estimators are well studied.
610
B. Lazarus S., Tsourdos A., Sequeira J. and Savvaris A..
EKF based Data Fusion using Interval Analysis via Covariance Intersection, ML and a Class of OGK Covariance Estimators.
DOI: 10.5220/0004040406100613
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 610-613
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 CI, & OGK ESTIMATORS
The covariance intersection algorithm (CI) has a con-
vex combination of the means and the covariance
in the information space. CI estimates are shown
that it is an optimal method when the cross corre-
lation between the measurements being fused is un-
known. This advantage of this additional information
exchange is that estimates on the cross correlation be-
tween them can then be integrated in the fusion pro-
cess. The class of OGK estimators used in this paper
is described in Table (1). It is a variation from the
method described in (Copt and Victoria-Feser, 2003)
and combines both information on the covariance es-
timates and on the data that yielded such covariances.
For the purpose of experiments this is set to ω = 1.
The underlying idea of the process is to extract vari-
ances accounting for the distances between the mea-
surements. If one of the axis is much bigger than the
other and the variances along this axis are small then it
is likely that the measurements that induce the length
of the bigger axis are but outliers.
To summarize the process, the OGK estima-
tor starts by scaling the input data (step 2) and
computing an initial covariance estimate using the
Gnanadesikan-Kettering estimator (step 3). This ini-
tial estimate is used to obtain a new basis (step 4),
formed with the eigenvectors, where the scaled data
are projected and the new variances are computed
along each of the axis of the new frame (step 5). The
data are then reverted back to the original frame (step
6).
3 IA BASED POSITION
ESTIMATION
This section describes the vehicle’s position estima-
tion using interval analysis (Kieffer et al., 2000) with
the sensor readings from the laser sensors. The main
advantage of this method is that, it guarantees on the
bounds and that makes the system less sensitive to
the problem of consistency of typical filters such as
the Extended Kalman Filters. Also it handles the
problem without any linearization. The interval po-
sition estimation using SIVIA (Set Inversion Via In-
terval Analysis) (Jaulin and Walter, 1993) reported
in (Ashokaraj, 2004) to estimate the interval posi-
tion of the vehicle. The detailed description of this
algorithm is described in (L´evˆeque et al., 1997) and
(Jaulin et al., 2001). SIVIA assumes that it has a large
initial search box [x]
0
which is guaranteed to include
A. The SIVIA basically has four steps and the two
subpavings A and A which are initialized with empty
box so as to identify the exact interval position within
that box. The four basic steps of SIVIA based on the
inclusion functions are given below:
• [x] does not belong to A, if [f]([x]) has an empty
intersection with B i.e [f]([x]) ∩ B =
/
0.
• [x] is included in the solution subpaving A, if
[f]([x]) is completely inside B and therefore they
are stored in A and A.
• [x] is judged to be undetermined, thus implying
that [x] may only include part of the solution set if
[f]([x]) has a non-empty intersection with B, but
is not completely inside B. If [x] has a width w
greater than ε the pre-specified precision param-
eter, then the box is bisected generating two off-
springs and the tests are again applied recursively
for these offsprings.
• Finally if the box has a width smaller than the pre-
specified precision parameter ε and at the same
time they are found to be undetermined, then it is
considered to be small enough to be stored in the
outer approximation A of A.
4 EKF BASED DATA FUSION
As described earlier, in this paper the three different
data fusion estimators are presented namely, CI, ML,
OGK. The vehicle is assumed that it operates in a par-
tially known environment where the surrounding ob-
stacles are known to some extent. It is also assumed
that the vehicle velocity is assumed to be constant
and the vehicle is equipped with INS sensors, laser
and GPS receiver. An INS with a nonlinear extended
Kalman filter is used to estimate the heading angle
and the position of the vehicle. The INS provides the
information about the vehicle’s position, velocity and
heading angle (yaw angle). To estimate the errors in
the INS states a Kalman filter is used which utilizes
the measurements from other estimated sources (X &
Y position from IA). The Kalman filter uses an INS
error model which gives the optimal Kalman gain.
This Kalman gain is used with the innovations(X & Y
positions) to estimate the errors in the INS estimates
(Lazarus et al., 2008).
As the vehicle moves, based on the measurements
received from the INS senors the time-update stepin
the Kalamn filter is updated. When the vehicle passes
through any of the known surrounding obstacles then
the fusion algorithm is implemented. In order to ac-
complish this task, initially the vehicle’s interval posi-
tion is estimated using IA based SIVIA method which
is relative to the known obstacle. Basically this fu-
sion algorithm using EKF represents the infertilities
EKFbasedDataFusionusingIntervalAnalysisviaCovarianceIntersection,MLandaClassofOGKCovariance
Estimators
611
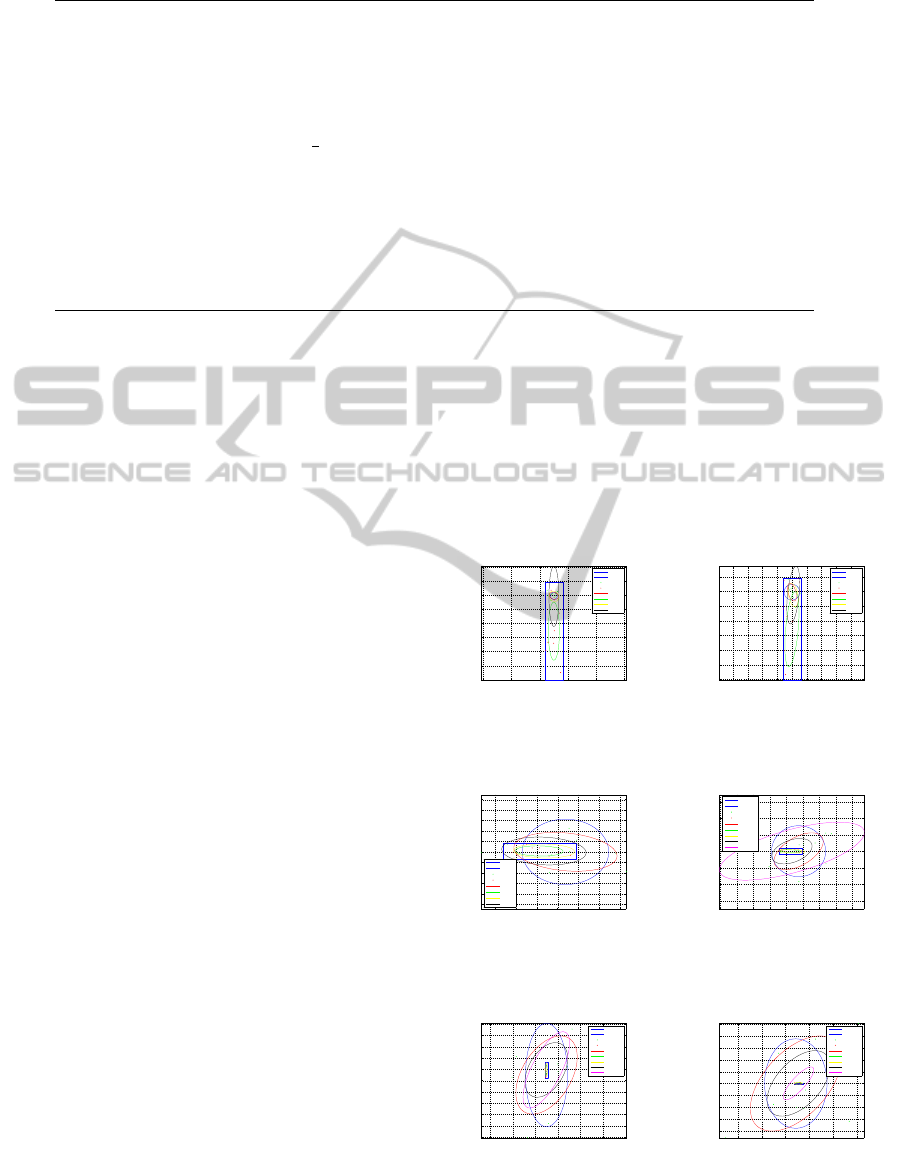
Table 1: The OGK covariance estimator (ω is the class parameter).
0 Let σ(·) be a standard deviation function applied to its argument
1 Let X = (X
1
, . . . , X
p
) ∈ R
n×p
be the set of n observations, each of dimension p
2 Let D = diag{(}σ(X
j
)), j = 1, . . . , p and define Y = XD
−T
3 Compute U =
u
jk
=
(
1
4
(σ(X
j
+ X
k
)
2
− σ(X
j
− X
k
)
2
) j 6= k
σ(X
j
)
2
j = k
4 Compute E such that U = EΛE
−1
with Λ the diagonal matrix with the eigenvalues of U
5 Let Z = YE and A = ωED
−1
, with ω a scalar, and Γ = diag(σ(Z
j
)
2
), j = 1, . . . , p
6 The covariance estimate is Σ = A
T
ΓA
from two different sensors. The fist source of infor-
mation is obtained from the INS sensors and its uncer-
tainties are represented in the form of P
k
matrix (i.e.,
the covariance matrix in EKF in time step). The sec-
ond source of information is obtained from the Inter-
val analysis method where the uncertainties are rep-
resented in the form of interval (i.e., Interval box of
the vehicle’s position using laser range sensor). For
the sake of simplicity in this work a set of random
data are generated within this interval by using the
mid point of this interval box thereby a covariance
is constructed which represents the uncertainty in the
interval position of the vehicle.
Finally the information obtained from these two
different sources are fused with the CI algorithm so
as to perform the measurement-update process in the
Kalman Filter. Further, the same process of generat-
ing a random set of data is applied for the EKF esti-
mated covariances as well. then the constructed two
different covariance matrices which use the random
data within two different uncertainties are fused using
the ML algorithm. Then, this set of two different ran-
dom data is given as an input to the OGK estimator in
order to fuse this two different source of information.
The resultant covariance matrix is used to update the
Kalman Filter’s measurement-update step.
5 SIMULATION RESULTS
The simulation results of the above explained algo-
rithm is given in this section. The task of vehicle
navigation is achieved by updating the EKF at each
iteration (i.e., the time and measurement updates).
Initially a sequence of ten random data is generated
within the interval region thereby a covariance is es-
timated from the IA estimated position so as to fuse
this covarince matrix with the Kalman predicted co-
variance matrix (i.e. time-update step). Secondly
these two covariances are fused using CI algorithm.
Thirdly a same set of random data is also generated
within the region of the Kalman estimated covariance
and thereby a covariance matrix is constructed using
this random data. Finally, these two set of covariances
are fused using the ML and the OGK estimators. The
simulation results of some of the iterations are given
in figures 1 - 3. As can be observed from these fig-
−1 −0.8 −0.6 −0.4 −0.2 0
2.4
2.5
2.6
2.7
2.8
2.9
3
3.1
3.2
IA
EKF
data−1
data−2
ML 1
ML 2
CI 1,2
ML 1,2
(a) Iteration 2
−0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1
4.4
4.5
4.6
4.7
4.8
4.9
5
5.1
IA
EKF
data−1
data−2
ML 1
ML 2
CI 1,2
ML 1,2
(b) Iteration 6
Figure 1: The resultant covariances using CI, ML, and OGK
at each iterations-1.
2.2 2.4 2.6 2.8 3 3.2 3.4
7.5
7.6
7.7
7.8
7.9
8
8.1
8.2
8.3
8.4
8.5
IA
EKF
data−1
data−2
ML 1
ML 2
CI 1,2
ML 1,2
(a) Iteration 12
4 4.5 5 5.5 6 6.5 7 7.5 8
6.5
7
7.5
8
8.5
9
9.5
IA
EKF
data−1
data−2
ML 1
ML 2
CI 1,2
ML 1,2
OGK 1,2
(b) Iteration 19
Figure 2: The resultant covariances using CI, ML, and OGK
at each iterations-2.
6 7 8 9 10 11 12
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
IA
EKF
data−1
data−2
ML 1
ML 2
CI 1,2
ML 1,2
OGK 1,2
(a) Iteration 27
−2 0 2 4 6 8
−4
−3
−2
−1
0
1
2
3
4
5
IA
EKF
data−1
data−2
ML 1
ML 2
CI 1,2
ML 1,2
OGK 1,2
(b) Iteration 39
Figure 3: The resultant covariances using CI, ML, and OGK
at each iterations-3.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
612

ures, since the Kalamn estimated covariance is negli-
gible (small), the OGK algorithm is not implemented
in the initial iterations. As the vehicle moves, the un-
certainties in the system noise will rapidly increas;
this requires the necessitates the implementation of
the data fusion algorithm. It is also observed that
the Kalman estimated covariance is emerging bigger
in each of the iterations by increasing the region of
uncertainties. Whenever the data fusion algorithm is
applied the region of this uncertainties is rapidly re-
duced by performing the measurement-update in the
Kalman filter. The last stages of iterations show that
the OGK algorithm is robust when the Kalman esti-
mates are unpredictable within the assumed distribu-
tions. In nutshell, the presented algorithms are com-
plementary in the sense that they compensate for each
other’s limitations, so that the resulting performance
is much better than of its individual techniques, which
in turn, provide more accurate position information of
the vehicle.
6 CONCLUSIONS
The paper presents robust data fusion techniques via
CI and a particular class of OGK covariance esti-
mators for fusion of information from two different
sources namely EKF and IA. The CI approach uses
the covariance matrices of the data sources whereas
the OGK uses an estimate of the joint covariance and
information from the measurements themselves. The
comparison between the two estimators is based on
the 2-norms. This measure combines information re-
lated to the volume of the error ellipsoids and their
eccentricity. The analysis on the relevant bounds for
the two measures shows that, in worst case conditions,
there are regions of the spectrum of the covariance
matrices in which each of the estimators outperforms
the other. For generic applications, a hybrid of the
two estimators may then provide the best results.
The application of this OGK estimation technique
to 3D needs a recalculation of the bounds involved.
Still, the same basic principles apply. The ongoing
work also includes the testing of classes of OGK es-
timators in the information fusion problem that are
applied to a number of ground and aerial vehicle in-
volved in a mapping mission.
REFERENCES
Ashokaraj, I. A. R. (2004). Feature based navigation and
localisation using interval analysis. Phd thesis, Cran-
field University.
Ashokaraj, I. A. R., Silson, P. M. G., Tsourdos, A., and
White, B. A. (2009). Robust sensor-based navigation
for mobile robots. IEEE Transactions on Instrumen-
tation and Measurement, 58(3):551–556.
Carvalho, K. F. A. C. D. and Rezende, S. O. (2004). Com-
bining intelligent techniques for sensor fusion. Ap-
plied Intelligence, 20:199213.
Copt, S. and Victoria-Feser, M. (2003). Fast algorithms for
computing high breakdown covariance matrices with
missing data.
Gnanadesikan, R. and Kettenring, J. (1972). Robust esti-
mates, residuals, and outlier detection with multire-
sponse data. Biometrics, 28(1):81–124.
Jaulin, L., Kieffer, M., Didrit, O., and Walter, E. (2001).
Applied Interval Analysis with examples in parame-
ter and state estimation robust control and robotics.
Springer-Verlag, London.
Jaulin, L. and Walter, E. (1993). Set inversion via interval
analysis for nonlinear bounded-error estimation. Au-
tomatica, 29(4):1053 to 1064.
Julier, S. J. and Uhlmann, J. K. (1997). A non-divergent
estimation algorithm in the presence of unknown cor-
relations. In American Control Conference, pages
2369–2373, Albuquerque, New Mexico.
Kieffer, M., Jaulin, L., Walter, E., and Meizel, D. (2000).
Robust autonomous robot localization using interval
analysis. Reliable Computing, 3(6):337 to 361.
Lazarus, S. B., Tsourdos, A., Silson, P., White, B. A.,
and Zbikowski, R. (2008). Unmanned aerial vehi-
cle navigation andmapping. Proc.IMechE. Part G: J.
Aerospace Engineering, 222(246):531 – 548.
L´evˆeque, O., Jaulin, L., Meizel, D., and Walter, E. (1997).
Vehicle localization from inaccurate telemetric data: a
set-inversion approach. In 5th IFAC Symp on Robot
Control SY.RO.CO. ’97, Nantes, France, volume 1,
pages 179 – 186.
Montemerlo, M., Thrun, S., Koller, D., and Wegbreit, B.
(2002). FastSLAM: A Factored Solution to the Si-
multaneous Localization and Mapping Problem. In
Procs. of the 8th AAAI National Conf. on Artificial In-
telligence. Edmonton, Alberta, Canada.
Mourikis, A. I. and Roumeliotis, S. I. (2006). Predicting
the Performance of Cooperative Simultaneous Local-
ization and Mapping (C-SLAM). The International
Journal of Robotics Research, 25(12):1273–1286.
Vadakkepat, P. and Jing, L. (2006). Improved particle filter
in sensor fusion for tracking randomly moving object.
IEEE Transactions on Instrumentation and Measure-
ment, 55(5):1823–1832.
Walter, M. and Leonard, J. (2004). An Experimental Inves-
tigation of Cooperative SLAM. In Procs. of the 5th
IFAC Symposium on Intelligent Autonomous Vehicles,
(IAV 2004). Lisbon, Portugal.
EKFbasedDataFusionusingIntervalAnalysisviaCovarianceIntersection,MLandaClassofOGKCovariance
Estimators
613
