
Predicting Fault-proneness of Object-Oriented System Developed
with Agile Process using Learned Bayesian Network
Lianfa Li
1,2
and Hareton Leung
2
1
LREIS, Inst. of Geog. Sciences and Resources Research, CAS, Beijing, China
2
Department of Computing, The Hong Kong Polytechnic University, Kowloon, Hong Kong
Keywords: Object-Oriented Systems, Fault-proneness, Software Quality, Data Mining.
Abstract: In the prediction of fault-proneness in object-oriented (OO) systems, it is essential to have a good prediction
method and a set of informative predictive factors. Although logistic regression (LR) and naïve Bayes (NB)
have been used successfully for prediction of fault-proneness, they have some shortcomings. In this paper,
we proposed the Bayesian network (BN) with data mining techniques as a predictive model. Based on the
Chidamber and Kemerer’s (C-K) metric suite and the cyclomatic complexity metrics, we examine the
difference in the performance of LR, NB and BN models for the fault-proneness prediction at the class level
in continual releases (five versions) of Rhino, an open-source implementation of JavaScript written in Java.
From the viewpoint of modern software development, Rhino uses a highly iterative or agile development
methodology. Our study demonstrates that the proposed BN can achieve a better prediction than LR and NB
for the agile software.
1 INTRODUCTION
In the prediction of fault-proneness (the probability a
software component contains at least one fault) as a
critical indicator of software quality in object-
oriented systems, it is essential to have informative
predictive factors (D'Ambros et al., 2012) and a
good prediction model. There are many choices for
predictive factors, including product metrics,
processing and external metrics, and other
combinations of factors (Pai and Dugan, 2007).
There are also many choices for the prediction
model which is as important as the predictive factors
in determining the accuracy of the fault-proneness
prediction (Menzies et al., 2007).
Logistic regression has been extendedly used for
the fault-proneness prediction as a benchmark
method. Recently other learners such as decision
tree (Singh et al., 2009), random forest (Guo et al.,
2004), naive Bayes (NB) (Menzies et al., 2007),
neural network (Singh et al., 2008) and support
vector machine (Singh et al., 2009) have been
successfully used to predict fault-proneness.
These prediction methods have some
shortcomings. For example, logistic regression
(Hosmer and Lemeshow, 2000) assumes a linear and
addictive relationship between predictors and the
dependent variable (fault-proneness) on a logistic
scale. This assumption is simplistic and presents a
critical constraint on the model (Gokhale and Lyn,
1997). Further, the form of logistic regression also
makes it difficult to combine qualitative predictors
such as processing or external factors with numeric
product metrics. NB has the constraints of assuming
the conditional independence of predictors and the
normal distribution of continuous product metrics as
predictors (John and Langley, 1995). Recently, Pai
and Dugan (Pai and Dugan, 2007) used LR to
construct and parameterize their BN model which
did not avoid the typical constraints associated with
LR. Other approaches such as random forest and
neural network were black-box models and less
interpretable although having a good prediction
performance.
In this paper, we present a Bayesian network as a
learning model. In this model, we examine the
performance of BN against the LR and NB using the
continual versions of the open-source JavaScript tool,
Rhino which has been developed using the agile
software development processes. Our study shows
that the learned BN was mostly better than the LR
and NB from the cross-validation test and from the
validation of the continual Rhino versions. The
results suggest that our proposed BN is valuable as a
5
Li L. and Leung H..
Predicting Fault-proneness of Object-Oriented System Developed with Agile Process using Learned Bayesian Network .
DOI: 10.5220/0004392900050016
In Proceedings of the 15th International Conference on Enterprise Information Systems (ICEIS-2013), pages 5-16
ISBN: 978-989-8565-60-0
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

prediction model of fault-proneness.
The agile software development strategy is an
iterative and incremental approach to software
development which is performed in a highly
collaborative manner that is cost effective and meets
the changing needs of its stakeholders (Ambler and
R., 2002; Cohn, 2006; Herbsleb, 2001). Agile
Alliance defined 12 principles for the agile
development process (Cohn, 2006 ). Olague et al.
argued that Rhino was a typical software product
using the agile development strategy (Olague et al.,
2007). Also, their study showed that product metrics
(e.g. C-K metrics) at the class level were useful for
the fault-proneness prediction of the agile OO
systems. Therefore, our case study uses the C-K
metrics and the cyclomatic complexity metrics to
examine the difference in performance of the
prediction methods (LR, NB and our proposed BN)
for fault-proneness.
This paper makes the following contributions. First,
we present the BN with data mining techniques for
learning and optimization and demonstrate its
distinguishing features and advantages (more
flexible network topology for including quantitative
and qualitative predictors, and wide choices of
optimal learning algorithms) in comparison to the
LR and NB models. Second, based on the cross-
validation and the validation of the continual
versions of Rhino, we show the superior
performance of the learned BN. Third, our study
adds to the body of empirical knowledge about the
prediction models of fault-proneness.
The rest of this paper is organized as follows. In
section 2, we introduce the metrics used, the system
under study and the collection of predictors. In
section 3, we describe the modelling techniques of
LR, NB and BN and compare them. Section 4
presents data analysis procedures and methods
employed. The experimental results are reported and
discussed in section 5. In section 6, we draw
conclusions and suggest some future work.
2 BACKGROUND
2.1 Metrics used
We use the Chidamber and Kemerer’s (C-K) metric
suite and the cyclomatic complexity metrics at the
class level as predictors. The C-K metric suite has
been empirically validated to be useful for the fault-
proneness prediction in many studies (Basili et al.,
1996; Briand et al., 2000; Olague et al., 2007) and so
are the cyclomatic complexity metrics (Cardoso,
2006). It is assumed that the higher the metric value,
the more fault-prone is the class.
In the C-K metrics implemented for our research
(Chidamber and Kemerer, 1994), LCOM represents
a later variation of the original LCOM that has been
shown to have a better predictability (Harrison et al.,
1998). These metrics are listed below:
WMC (Weighted Methods per Class): The
number of methods implemented in a class.
DIT (Depth of Inheritance Tree): Maximum
number of edges between a given class and a
root class in an inheritance graph (0 for a
class which has no base class).
NOC (Num. Children): A count of the
number of direct children of a given class.
CBO (Coupling Between Objects): Counts
other classes whose attributes or methods are
used by the given class plus those that use the
attributes or methods of the given class.
RFC (Response For a Class): A count of all
local methods of a class plus all methods of
other classes directly called by any of the
methods of the class.
LCOM (Lack of Cohesion of Methods):
Number of disjoint sets of local methods, no
two sets intersect, and any two methods on
the same set share at least one local variable
(1998 definition).
The cyclomatic complexity can be extracted from
each of the methods (McCabe, 1976).
CCMIN: Minimum of all cyclomatic
complexity values of the methods for a class.
CCMAX: Maximum of all cyclomatic
complexity values of the methods for a class.
CCMEAN: Arithmetic average of all
cyclomatic complexity values of the methods
for a class.
CCSUM: Sum of all cyclomatic complexity
values of the methods for a class.
2.2 System under Study
Mozilla’s Rhino (Boyd, 2007) was used in our study.
Rhino is an open-source implementation of
JavaScript completely written in Java. This system
has been developed by three programmers, all in
separate locations worldwide, following an iterative
cycle from 2 to 16 months. The core components
and their related bug data of versions 1.5R3, 1.5R4,
1.5R5, 1.6R1, and 1.6R2 of Rhino were analyzed in
our study. Fault reports of Rhino exist in the online
Bugzilla repository (Bugzilla, 2005). We examined
the change logs of each version of Rhino which
listed the post-release bugs that were resolved for
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
6
the next version. Bug fixes were cross-referenced
with classes affected by each bug/fix.
2.3 Collection of Metrics
In our study, we mainly used the open-source Java
metric toolkits for extracting the product metrics
from Rhino. Spinellis’s CKJM (Spinellis, 2006) has
been integrated in our program to collect the C-K
metrics, and CYVIS, a software complexity
visualiser (CYVIS, 2007) has been adapted to
extract the cyclomatic complexity metrics (CCMAX,
CCMEAN, CCSUM and CCMIN) at the class level
from the Java class files.
Table 1: Descriptive Statistics of Predictive Factors Used.
Note that our initial analysis shows that, among the
complexity metrics, CCMIN has little contribution
to the fault-proneness prediction and hence it is
removed from the set of predictors. Also, there is a
large correlation between CCMAX, CCMEAN and
CCSUM. This leads to the problem of
multicollinearity (Olague et al., 2007). After
comparing their correlation with the C-K metrics,
we select the complexity metric with a good
predictability and less redundancy of information.
Consequently, CCMAX is chosen in our case study,
as shown in Table 1.
Figure 1: Number of classes and number of faulty classes
for core components of the chosen Rhino versions.
As we mainly focus on the fault data of Rhino’s core
components, the metric data were generated from
the same core components only. Table 1 presents the
descriptive statistics of predictive factors and Fig. 1
shows the number of classes and the number of
faulty classes reported for the core components of
the chosen Rhino’s versions.
3 MODELING TECHNIQUES
3.1 Logistic Regression
Logistic regression is a technique of probability
estimation based on maximum likelihood estimation.
In this model, let Y be the fault-proneness of a class
as the dependent variable (Y=1 indicating “faulty”
and Y=0 “fault-free”) and X
i
(i=1, 2, …, n) be the
predictive factors. LR assumes that Y follows a
Bernnouli distribution and the link function relating
X
i
and Y is the logit or log-odds:
e
Yp
1
1
),|1(
(1)
where X=(1, X
1
, X
2
, …, X
n
), β=(β
0
, β
1
, β
2
, …, β
n
)
T
and β can be estimated by the maximum likelihood
estimator that would make the observed data most
likely (Hosmer and Lemeshow, 2000).
The LR curve between p and X
i
takes on an S
shape. When X
i
is not significant, the curve
approximates a horizontal line; conversely, the curve
presents a steep rise. This S shape is consistent with
the assumption about the empirical relationship
between predictors and the dependent variable
(Briand et al., 2000).
As shown in equation (1), LR assumes that the
predictive factors, X, are linearly and addictively
related to Y on a logistic scale. This may be too
simplistic and can introduce bias (Gokhale and Lyn,
1997). Further, LR uses only quantitative factors for
the prediction and constrains the inclusion of other
factors such as processing or external factors.
3.2 Naïve Bayes
The Bayes theorem is the theoretic foundation of the
naïve Bayes (NB) and also the Bayesian network:
)(
)()|(
)|(
XP
CPCXP
XCP
(2)
here C refers to the hypothesis (for the fault-
proneness prediction of a class, it denotes the
“faulty” or “fault-free” state of the class), X is the
evidence, i.e. the predictive factors. P(X) and P(C)
respectively refer to a prior probability of X and C.
Version
Items WMC DIT NOC CBO RFC LCOM
CCMAX
1.5R3
Mean 14.79 0.81 0.35 6.04 37.29 228.27 20.75
STDEV
19.55 0.84 1.29 7.24 47.13 811.40 43.88
1.5R4
Mean 14.76 0.85 0.32 6.08 26.91 236.45 21.58
STDEV
20.06 0.81 1.28 7.61 48.13 851.95 47.72
1.5R5
Mean 14.85 0.86 0.34 5.96 36.86 234.21 19.24
STDEV
19.93 0.85 1.34 6.84 47.68 914.97 42.29
1.6R1
Mean 15.53 0.82 0.33 6.12 38.87 300.16 20.50
STDEV
22.84 0.82 1.56 7.54 53.70
1475.65
44.82
1.6R2
Mean 15.84 0.73 0.34 6.33 39.64 303.44 20.77
STDEV
22.82 0.65 1.58 7.64 54.24
1482.48
46.25
80
100
120
140
160
10
20
30
40
50
60
70
Number of classes
54
20
Num of faulty classes
Number of classes
Number of faulty classes
118
116
119
125
124
118
51
53
29
Version
PredictingFault-pronenessofObject-OrientedSystemDevelopedwithAgileProcessusingLearnedBayesianNetwork
7
P(X|C) is the likelihood of X given C, and P(C|X) is
the posterior probability of C conditional to any
evidence, X.
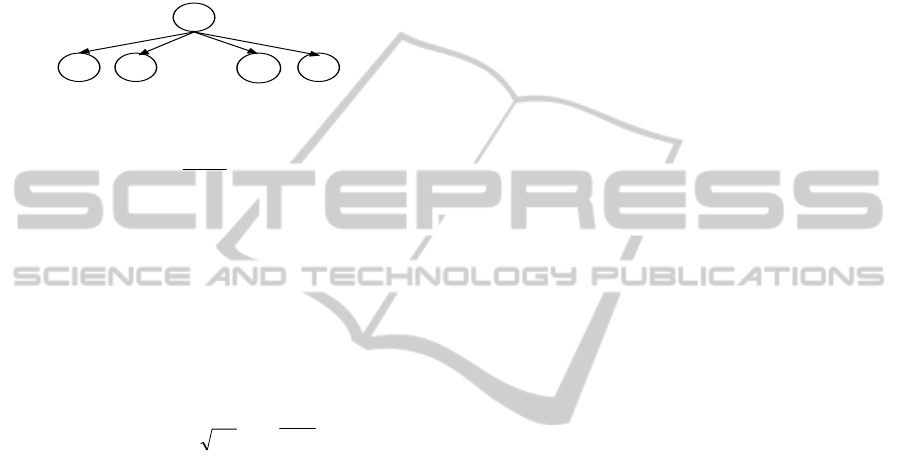
Naïve Bayes is the simplest BN with a single
structure of a target node and multiple evidence
nodes (as shown in Figure 2) with the simplistic
assumption that the predictive factors are
conditionally independent given the class attribute
(C=“fault-free” or “faulty”, see the modeling
equation (3)).
C
1
X
2
X
1n
X
n
X
... ...
Figure 2: Naïve Bayes: the simplest BN.
i
in
CXP
XP
Cp
XXCP )|(
)(
)(
),,|(
1
(3)
If a predictive factor is continuous, the naïve
Bayes approach often assumes that within each class,
the numeric predictors are normally distributed
(Menzies et al., 2007). Such a distribution can be
represented in terms of its mean (μ) and standard
deviation (σ). Thus, we can estimate the probability
of an observed value from such estimates:
),;()|(
cx
xgcCxXp
(4)
where
2
2
2
)(
))2/(1(),;(
x
exg
(5)
Equation 5 denotes the probability density
function (pdf) for a normal (Gaussian) distribution.
For the parameters (μ, σ) of the distribution of the
continuous metric predictor, we can use the
maximum likelihood estimates of the mean and
standard deviation (the sample average and the
sample standard deviation of the predictor within
each class).
The two assumptions of naïve Bayes, namely,
the conditional independence and the normal
distribution of continuous predictors, may not hold
for some domains (predictive metrics) (John and
Langley, 1995), thus affecting its prediction
performance.
3.3 Learned Bayesian Network
Different from the LR and NB models, Bayesian
network (BN) has a flexible network topology. We
can use techniques of data mining and optimization
to search for an optimal network and parameters to
generate a better model. Further, we can use optimal
discretization techniques to convert continuous
metrics into discrete inputs for the BN.
3.3.1 Basic Model
Definition 1. A Bayesian Network B over the set of
variables, V, is an ordered pair (B
S
, B
P
) such that
1. B
S
=G(V, E) is a directed acyclic graph, called the
network structure of B (
VVE
is the set of
directed edges, representing the probabilistically
conditional dependence relationship between
random variable (rv) nodes that satisfies the
Markov property, i.e. there are no direct
dependency in B
S
which are not already
explicitly shown via edges, E) and
2. B
P
=
}|]1...0[:{ Vu
u
uu
is a set of
assessment functions, where the state space Ω
u
is
the finite set of values for the variable u; π
u
is the
set of parent nodes of variables for u, indicated
by B
S
; if X is a set of variable, Ω
X
is the Cartesian
product of all state spaces of the variables in X;
γ
u
uniquely defines the joint probability
distribution P(u|π
u
) of u conditional on its parent
set, π
u
.
Let c be the “FAULT” rv of a class and its state
space Ω
c
be binary, then Ω
c
={“faulty”, “faultless”}.
In a specified BN, if some evidences are given, we
can get the posterior probability or belief of
c=“faulty” as the fault-proneness by calculating the
marginal probability:
cuVu
n
ii
ucuupcBel
,
21
),...,,...,,()"faulty"(
(6)
where
Vu
uin
i
i
upuup )|(),...,(
1
is the joint
probability over V.
In practice, we often use the efficient algorithm
of exact inference or approximate inference rather
than the marginalization of the joint probability to
compute Bel.
3.3.2 Optimal Discretization by Learning
According to Definition 1, we need to generate the
discrete state space Ω
u
of u as inputs to the BN when
the predictor u is continuous. As the predictive
factors used in our study are quantitative metrics,
discretization is necessary. There are two classes of
discretization methods: supervised and
unsupervised. Supervised methods can often achieve
a better result than unsupervised methods. Since we
have training instances with fault data, we use a
supervised method, the optimal multi-splits
algorithm proposed by Elomaa and Rousu (Elomaa
and Rousu, 1996), which is based on the information
theory. This algorithm finds the optimal cut-points
of a continuous predictor based on the
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
8

discretization’s contribution to the classification
prediction (“faulty” or “fault-free”). This algorithm
can achieve good splits with the optimal number of
numeric intervals adaptively adjusted, although we
need to set the maximum number of intervals
(Elomaa and Rousu, 1996).
The algorithm uses the following as the goodness
criterion:
1
( , 1, ) min ( ( 1,1, ) (1, 1, ) )
ji
Impurity k i impurity k j impurity j i
(7)
where impurity(k, j, i) denotes the minimum
impurity that results when the training instances j
through i are partitioned into k intervals. The best k-
split is the one that minimizes impurity(k,1, N),
where N is the cardinality of the set of values of the
continuous predictor. The measure impurity (1, j+1,
i) is the average class entropy of the partition (the
conditional entropy given the partition). The
minimization of impurity makes minimum the
number of bits to encode the splits for the class
prediction, thus satisfying Occam's MDL principle
of the information theory (Elomaa and Rousu, 1996).
The algorithm is recursively run to identify the
optimal splits.
3.3.3 GA Learning of the Network Structure
There are two kinds of learning methods for a BN
structure: the conditional independence test and the
search of the scoring space. Since our goal is to
obtain a BN with the best performance, we prefer
the latter because it can generate a BN satisfying the
Markov property and has an optimal prediction
performance. In learning of an optimal BN, a quality
score is required to measure the network’s quality.
There are three kinds of score measures that bear a
close resemblance (Bouckaert, 1995): Bayesian
approach, information criterion approach, and
minimum description length approach. We used the
Bayesian approach that uses the posterior probability
of the learned network structure given the training
instances as a measure of the structure’s quality.
There are different algorithms for searching the
optimal Bayesian network. In our study, we used the
genetic algorithm (GA) because it can better explore
the search space and therefore has a lower chance of
getting stuck in local optima (Kabli et al., 2007). It is
more likely to find the globally optimal solution.
GA is based on the mechanics of natural
selection and genetics (“survival of the fittest”) and
it aims to find the optimum with structured yet
randomized information exchange among encoded
string structures. It evolves by repeating the
following steps: initialization or re-formation of the
population, evaluation and selection of individuals,
crossover and mutation for generation of offspring
until the maximum quality score is obtained or the
maximum evolution time is used up. To learn an
optimal BN, a connectivity matrix C=(c
ij
)
i,j=1,…,n
is
used to encode the BN: if j is a parent node of i and
i>j, c
ij
=1; otherwise, c
ij
=0. Then the BN can be
represented by the string that consists of the
elements of C (Larranaga et al., 1996). The
inequality i>j ensures the assumed ancestral order
between the variables. Using the general GA for the
strings that encode the network structures, we can
find the optimal BN. For details of the algorithm, see
(Kabli et al., 2007; Larranaga et al., 1996).
In our study, the GA parameters were set as
follows: descendant population size=100, population
size=20, crossover probability=1, mutation
probability=0.1, random seed=1, and run time=50.
3.3.4 Learning of the Network Parameters
After the network structure is found, the conditional
probability table (CPT), i.e. implementation of
assessment functions in B
P
of the BN (Definition 1)
needs to be estimated from the database of instances.
We used the Bayesian estimator which assumes that
the conditional probability of each rv node
corresponding to its parent instantiation conforms to
the Dirichlet distribution (Korb and Nicholson,
2004) with local parameter independence:
),,,,(
1
i
D
with
i
being the hyperparameter
for state i.
The Dirichlet-based parameter estimator assumes
independence of local parameters which may not be
true in practice. This can result in biased parameters.
We can use the classification tree to improve the
learning while avoiding this assumption (Korb and
Nicholson, 2004).
3.3.5 Probabilistic Inference
The constructed BN model can be used to make an
inference of the probability prediction of the query
(target) variable (“faulty” or “fault-free”), given the
nodes of predictors. There are two kinds of
inference: exact inference and approximate
inference. Exact inference uses all the information of
nodes in the BN to make the probability inference. It
has a higher prediction accuracy than the
approximate inference, which makes the inference
through sampling (Korb and Nicholson, 2004). For a
large-scale connected BN, the exact inference is a
NP problem and the approximate inference is
preferred. But, in our study, as the learned network
PredictingFault-pronenessofObject-OrientedSystemDevelopedwithAgileProcessusingLearnedBayesianNetwork
9
is relatively simple (with less than 8 nodes), the
exact inference of the BN’s polytree (Korb and
Nicholson, 2004) is used, partly because it is more
efficient than the marginalization of the joint
probability.
4 DATA ANALYSIS
The data analysis mainly consists of four steps:
feature selection, multicollinearity analysis,
modeling and prediction, and evaluation.
4.1 Feature Selection
This step selects the correlative and informative
features (factors) for learning and prediction. As
Pearson’s correlation only measures the linear
correlation and may omit nonlinear information, we
use the information-based feature selector defined
by Quinlan (Quinlan, 1993): Information Gain Ratio
(GR). GR takes into account the information that
each feature contains and measures the gain ratio
given the feature to be assessed.
)(/))|()((),( fHfcHfHfcGR
(8)
where H(c|f) is the conditional entropy of the target
class c given the feature f (MacKay, 2003).
If a predictor is continuous, it is necessary to
discretize the predictor. We used the algorithm
presented in section 3.3.2 to discretize the
continuous predictor before computing its GR
according to equation (8). Table 2 shows the GR of
the metrics used for each of the chosen Rhino
versions. CCMIN with GR of 0 will be removed
from the set of predictors.
Table 2: GR of C-K and Cyclomatic Complexity.
Metrics 1.5R3 1.5R4 1.5R5 1.6R1 1.6R2
WMC 0.23 0.21 0.14 0.23 0.26
DIT 0 0.09 0 0.18 0.12
CBO 0.36 0.24 0.13 0.22 0.20
RFC 0.49 0.24 0.22 0.30 0.26
LCOM 0.28 0.29 0.26 0.20 0.13
NOC 0 0.18 0 0 0
CCMIN 0 0 0 0 0
CCMAX 0.51 0.21 0.12 0.18 0.16
CCMEA N
0.29 0.18 0.12 0.17 0.12
CCSUM
0.11 0.22 0 0.16 0.13
4.2 Multicollinearity Analysis
For multicollinearity analysis, we can use the
combination of predictive factors with less
redundancy information for a better learning and
prediction for LR and NB. The variance inflation
factor (VIF) is often used to diagnose the
multicollinearity and weaken it (Dirk and Bart,
2004). If multicollinearity exists, by comparing the
Pearson’s correlation and removing one of the
strongly correlative independent variables, or
removing the predictor with the maximum VIF value,
the multicollinearity can be gradually weakened
until VIFs of all the predictors are equal to or
smaller than 3. We directly used the result of
multicollinearity analysis in (Olague et al., 2007)
since it analyzed the same system (Rhino) and
similar versions (1.5R3, 1.5R4 and 1.5R5) as ours.
Thus, two combinations of C-K metrics were chosen
as sets of predictive factors (with VIF<3):
C-K model 1: CBO, DIT, LCOM, NOC, and
WMC;
C-K model 2: CBO, DIT, LCOM, NOC, and
RFC.
For the cyclomatic complexity metrics, Table 2
shows that CCMAX has a larger GR for almost all
the Rhino versions, which indicates its higher
contribution to the prediction. Further, there are
large correlations between CCMAX, CCSUM and
CCMEAN (CCMIN is removed as its GR is 0).
Since we only need to select the one with a better
GR value as the predictor of complexity, we chose
CCMAX which also had a weak correlation with the
C-K metrics (as shown in Table 3). Thus, CCMAX
will be combined with those metrics in C-K model 1
and model 2 to generate new sets of predictors.
Table 3: CCMAX’s Correlation with CK-Metrics.
Version WMC DIT CBO RFC LCOM NOC
1.5R3 0.45* -0.21* 0.47* 0.56* 0.25* 0.22*
1.5R4 0.46* -0.09* 0.44* 0.57* 0.25* 0.04*
1.5R5 0.50* -0.07* 0.36* 0.55* 0.29* 0.023
1.6R1 0.46* -0.05 0.37* 0.53* 0.21* 0.072
1.6R2 0.47* 0 0.38* 0.54* 0.22* 0.074
*: Correlation is significant at the 0.01 level (2-tailed).
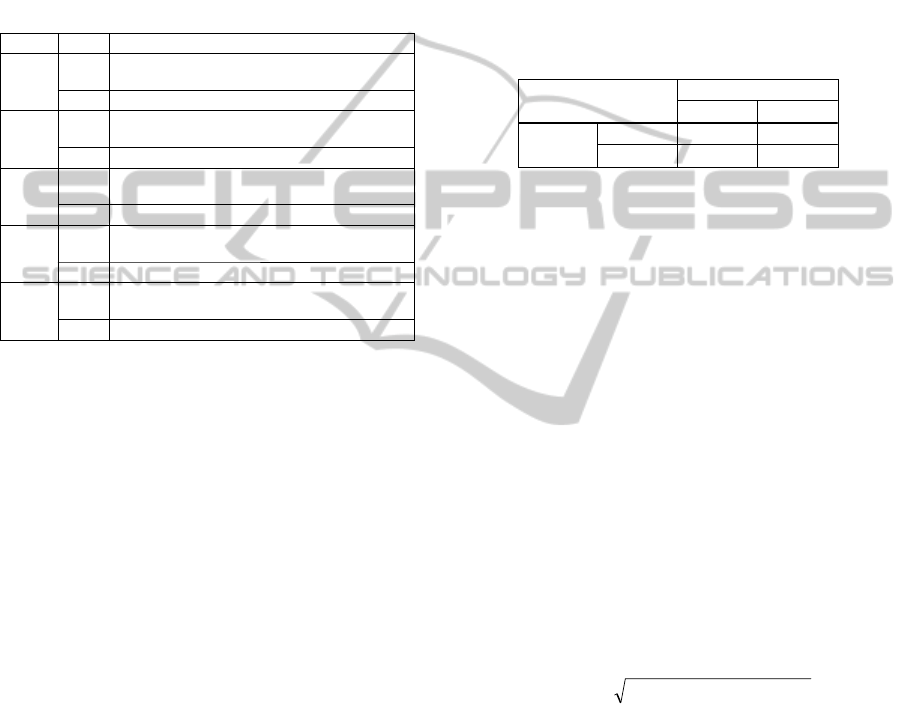
4.3 Modeling and Prediction
For LR and NB, we chose informative combinations
(Table 4) of predictive factors with less redundancy
information according to Table 2 and the above
multicollinearity analysis. As BN can model the
complex probabilistic dependent (conditional)
relationships between predictors with its flexible
network topology, we do not consider the
multicollinearity issue and choose all the predictors
with nonzero GR values.
The procedure of modeling and predictio
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
10
n follows the techniques described earlier in section
3. For the LR, the continuous product metrics are
directly used as inputs since its model (equation 1) is
based on continuous attributes; for the NB, we use
the pdf of a normal (Gaussian) distribution (equation
5) for estimation (equation 3). But for the BN, the
algorithm of section 3.3.2 is first used to discretize
the continuous predictors and then the modeling is
based on the discretized predictors and fault data.
Table 4: Combinations of predictors.
We evaluate the performance of these prediction
methods in two ways. The first method applied the
usual 10x10 cross-folder validation. In this
validation, the dataset was randomly divided into 10
buckets of equal size. 9 buckets were used for
training and the last bucket was used for the test.
The procedure was iterated 10 times and the final
result was averaged. For the construction of model,
we used all the instances for learning. The second
method used the prediction model of one version to
predict the fault-proneness of the relevant classes of
the next version (i.e. 1.5R3 for 1.5R4, 1.5R4 for
1.5R5, 1.5R5 for 1.6R1, and 1.6R1 for 1.6R2).
4.4 Evaluation Methods
We use the receiver operative characteristic (ROC)
as the evaluation method. ROC was originated from
the signal detection theory and statistical decision
theory. It assumes that the binary signal is corrupted
by Gaussian noise and the recognition accuracy
depends on the strength of signal, noise variance,
and desired hit rate or false alarm rate. We can set
different discrimination thresholds (p
0
) to test the
sensitivity of the recognition performance of the
learner for lowering the effect of noise variance.
ROC has been widely used in evaluation of binary
classifications as a relatively objective measure.
In a ROC graph, the horizontal axis represents 1-
specificity and the vertical axis the sensitivity. If we
register whether an artifact is fault-prone as the
signal (0 regarded as “fault-free” and 1 as “faulty”),
the 1-specificity refers to the ratio of the instances
detected as “faulty” among all the fault-free
instances (a.k.a.
probability of false alarms, pf) and
the sensitivity refers to the ratio of the instances also
detected as “faulty” among all the faulty instances
(a.k.a. probability of fault detection, pd). Precision
(p) is the proportion of the correctly predicted cases.
Table 5: A Confusion Matrix.
Predicted
fault-free faulty
Actual
fault-free
a b
faulty
c d
pd, pf, and precision can be calculated from the
confusion matrix (Table 5). The confusion matrix
contains information about actual and predicted
classifications from a learner. Each column of this
matrix represents the instances in a predicted class,
while each row represents the instances in an actual
class. From Table 5, we have:
pd=d/(c+d), pf= b/(a+b), p=d/(b+d)
As p is an unstable index for measuring the
prediction performance (Menzies et al., 2007b), we
regard it as a secondary reference.
According to the definition of pd and pf, their
range must be within the interval [0, 1]. A larger pd
with a lower pf indicates a good prediction
performance. When the ROC point (pf, pd) is closer
to the upper-left corner (0, 1), called “sweet spot”
where pf=0 and pd=1, the prediction model has a
better performance. Often we cannot simultaneously
achieve a high pd and low pf. The balance is based
on the Euclidean distance from the sweet spot (0,1)
to a pair of (pf, pd):
2/))1()0((1
22
pdpfbalance
(9)
A higher balance indicates being closer to the
sweet spot and a better prediction performance.
ROC curve corresponds to a sensitivity analysis.
We can set different values of the threshold of the
fault-proneness, p
0,
from 0 to 1, to calculate the
value pairs (pf, pd) for each threshold. Then we use
these pairs to construct a curve with pf varying from
0 to 1. If the curve is closer to the sweet spot and
more convex than another curve, then its
performance is better; if the curve is close to the
diagonal line from (0, 0) to (1, 1), its prediction
performance is no better than a random guess
(Heeger, 1998).
Version Method Combination of predictive factors
1.5R3
LR/NB
Model 1: CBO, LCOM, WMC, CCMAX
Model 2: CBO, LCOM, RFC, CCMAX
BN WMC, CBO, LCOM, RFC, CCMX
1.5R4
LR/NB
Model 1: CBO, DIT, LCOM, NOC, WMC, CCMAX
Model 2: CBO, DIT, LCOM, NOC, RFC, CCMAX
BN WMC, CBO, DIT, LCOM, NOC, RFC, CCMAX
1.5R5
LR/NB
Model 1: CBO, LCOM, WMC, CCMAX
Model 2: CBO, LCOM, RFC, CCMAX
BN WMC, CBO, LCOM, RFC, CCMX
1.6R1
LR/NB
Model 1: CBO, DIT, LCOM, WMC, CCMAX
Model 2: CBO, DIT, LCOM, RFC, CCMAX
BN WMC, CBO, DIT, LCOM, RFC, CCMAX
1.6R2
LR/NB
Model 1: CBO, DIT, LCOM, WMC, CCMAX
Model 2: CBO, DIT, LCOM, RFC, CCMAX
BN WMC, CBO, DIT, LCOM, RFC, CCMAX
PredictingFault-pronenessofObject-OrientedSystemDevelopedwithAgileProcessusingLearnedBayesianNetwork
11
1.5R3 1.5R4 1.5R5 1.6R1
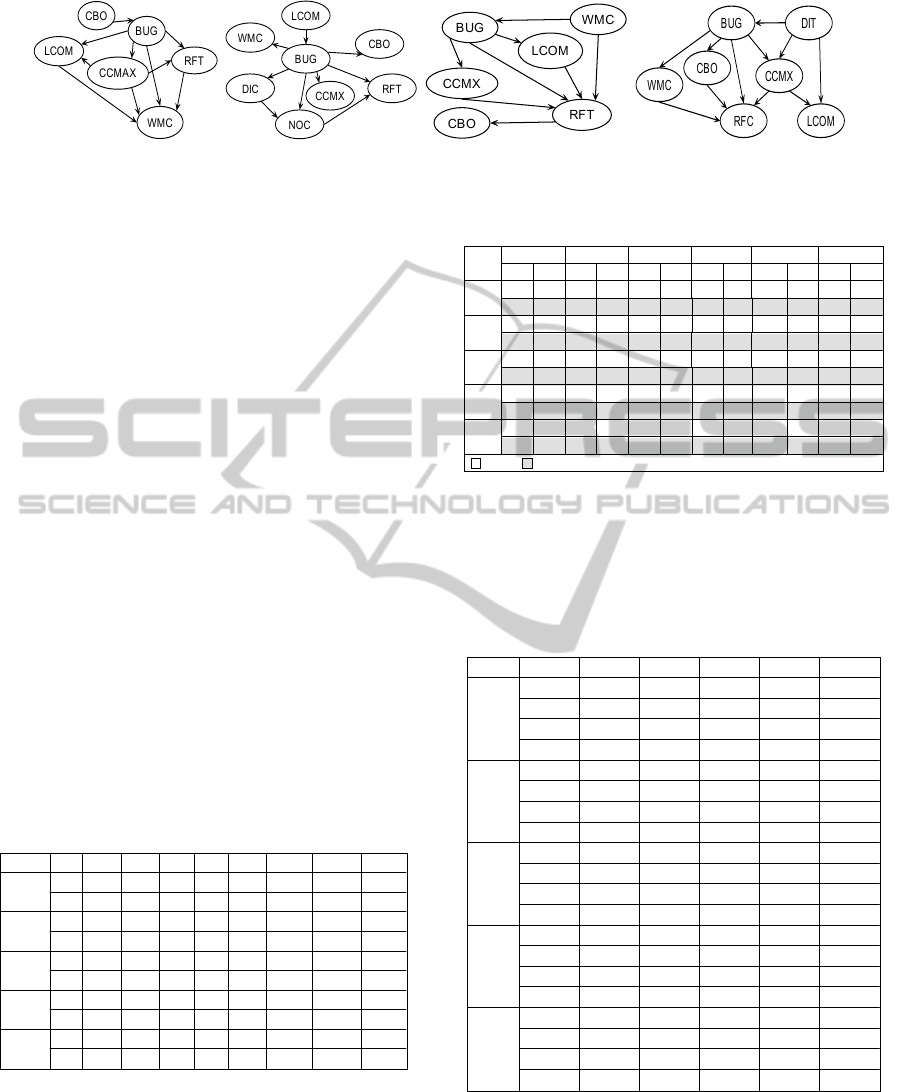
Figure 3: Network topologies of the learned BN for the chosen Rhino versions.
ROC area represents the area between the horizontal
axis and the ROC curve and it reflects the precision
of sensitivity analysis. Its value should be between
0.5 and 1. A value close to 0.5 indicates
completely invaluable, a value between 0.5 and 0.7
means lowly valuable, a value between 0.7 and 0.9
means moderately valuable, and a value above 0.9
indicates highly precise (Heeger, 1998).
5 RESULTS AND DISCUSSION
5.1 Learned Models
Table 6 lists the coefficients of model 1 and 2
learned by the LR. Our result shows that model 2 of
NB had a better performance than model 1. Thus, it
will be used for comparison against the LR and BN
models. Table 7 presents the parameters (mean and
standard deviation) of pdf for the “faulty” classes
(marked with 1) and “fault-free” classes (marked
with 0) of model 2 of the NB.
Figure 3 shows the network topology of the
learned BN for each of the four test versions (1.5R3,
1.5R4, 1.5R5, 1.6R1).
Table 6: Coefficients (β) Learned by LR.
Version
Model
WMC DIT NOC CBO RFC LCOM
CCMAX
Intercept
1.5R3
1 0.02 - - 0.05 - 0.000 0.02 -3.08
2 - - - 0.10 -0.01 0.002 0.02 -2.93
1.5R4
1 0.02 0.08 1.45 0.26 - 0.002 0.006 -2.4
2 - 0.04 1.46 0.22 0.02 -0.000 0.004 -2.32
1.5R5
1 0.06 - - 0.10 - -0.001 -0.004 -2.63
2 - - - 0.03 0.03 -0.001 -0.005 -2.40
1.6R1
1 0.03 -0.25 - 0.24 - -0.001 0.001 -1.67
2 - -0.26 - 0.20 0.02 -0.001 0 -1.00
1.6R2
1 0.03 -1.0 - 0.17 - -0.000 0.004 -1.57
2 - -1.09 - 0.09 0.03 -0.001 -0.00 -0.91
5.2 Comparison by Cross Validation
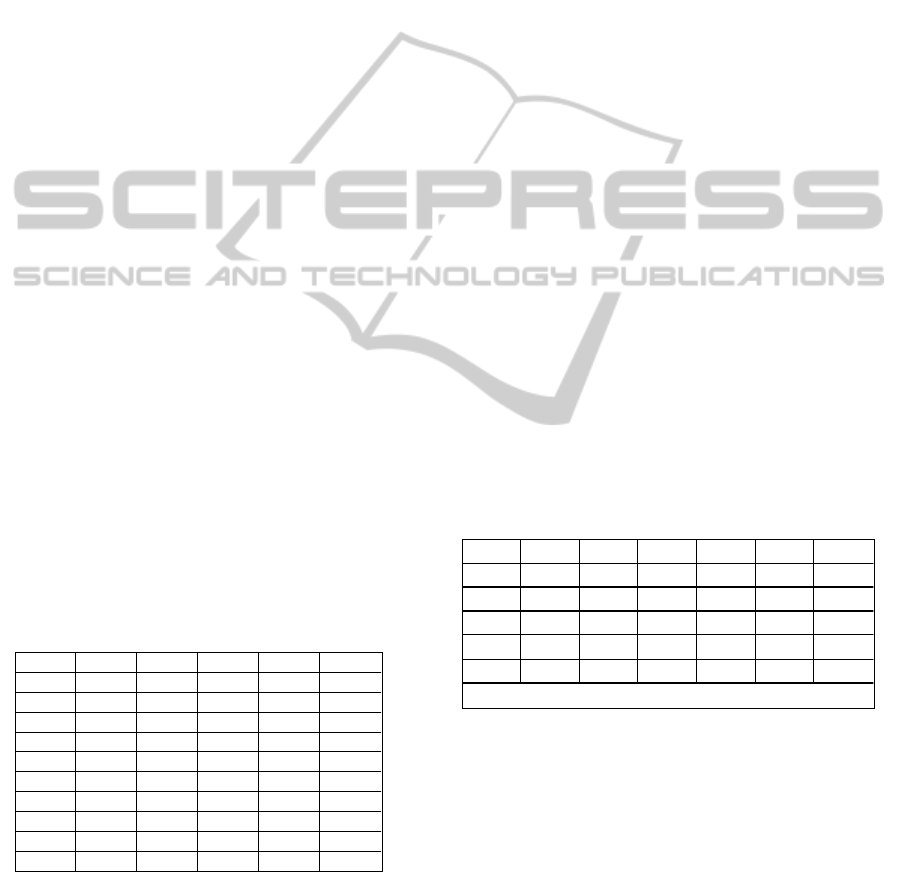
Table 8 gives the comparison of the prediction
models (LR, NB and BN) from the 10x10 cross-
folder validation. The BN achieves a better pd (0.55-
0.792) than the NB, LR-model 1 and LR-model 2 for
Table 7: Pdf’s Parameters for NB-Model 2.
the chosen Rhino versions (1.5R3, 1.5R4, 1.5R5,
1.6R1 and 1.6R2). Further, for each version, the
proposed BN keeps its pd above 0.5 which
demonstrates a high stability of prediction
performance.
Table 8: Comparison of the Models by Cross Validation.
Relatively, for the test versions, both LR and NB
have a lower and unstable pd value (the LR’s pd
ranges from 0.31 to 0.648 and the NB’s pd ranges
from 0.345 to 0.519). Also, the BN’s balance is
better and more stable than that of both LR and NB
although its precision is slightly lower than theirs.
Version
DIT NOC CBO RFC LCOM CCMAX
1 0 1 0 1 0 1 0 1 0 1 0
1.5R3
- - - -
13.44
4.48
90.58
25.9
1032.5
61.28 69.30 10.78
- - - -
12.13
4.62
73.65
29.23 1701.0
179.9 83.52 17.74
1.5R4
0.61 1.03 0.48 0.03
10.56
2.52
65.49
14.89 519.26
14.19 36.97
9.40
0.78 0.77 1.84 0.33 9.33 3.25
58.80
15.98 1232.1
58.78 58.82 32.11
1.5R5
- - - -
11.42
4.15
78.78
23.80
751.4
69.84 35.18 13.76
- - - - 9.93 4.59
67.24
29.80 1739.2
257.9 53.93 36.94
1.6R1
0.58 1.02 - - 9.75 2.90
63.67
19.13 599.43
40.11 30.68 12.26
0.90 0.69 - - 9.53 3.08
66.43
26.95 2154.1
239.1 51.81 36.60
1.6R2
0.49 0.92 - - 9.98 3.32
65.32
18.77 601.83
49.51 32.32 11.47
0.61 0.62 - - 9.83 3.34
68.33
25.29 2176.3
250.2
54.7
35.51
:mean; :standard deviation
Version Model pd pf
precision
ROC A rea
balance
1.5R3
LR-model1
0.4 0.031 0.727 0.784 0.399
LR-model2
0.4 0.031 0.727 0.755 0.399
NB-model2
0.55 0.061 0.647 0.778 0.546
BN 0.55 0.061 0.647 0.867 0.546
1.5R4
LR-model1
0.63 0.157 0.756 0.834 0.598
LR-model2
0.648 0.143 0.778 0.832 0.620
NB-model2
0.519 0.071 0.848 0.803 0.514
BN 0.722 0.129 0.813 0.89 0.694
1.5R5
LR-model1
0.276 0.052 0.615 0.756 0.274
LR-model2
0.31 0.052 0.643 0.767 0.308
NB-model2
0.345 0.063 0.625 0.697 0.342
BN 0.552 0.042 0.8 0.806 0.550
1.6R1
LR-model1
0.623 0.152 0.767 0.785 0.594
LR-model2
0.642 0.182 0.739 0.79 0.598
NB-model2
0.377 0.061 0.833 0.785 0.374
BN 0.792 0.242 0.724 0.84 0.681
1.5R2
LR-model1
0.627 0.231 0.681 0.796 0.561
LR-model2
0.609 0.185 0.721 0.804 0.567
NB-model2
0.392 0.046 0.87 0.77 0.390
BN 0.784 0.323 0.656 0.824 0.611
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
12
1.5R3 1.5R4 1.5R5 1.6R1
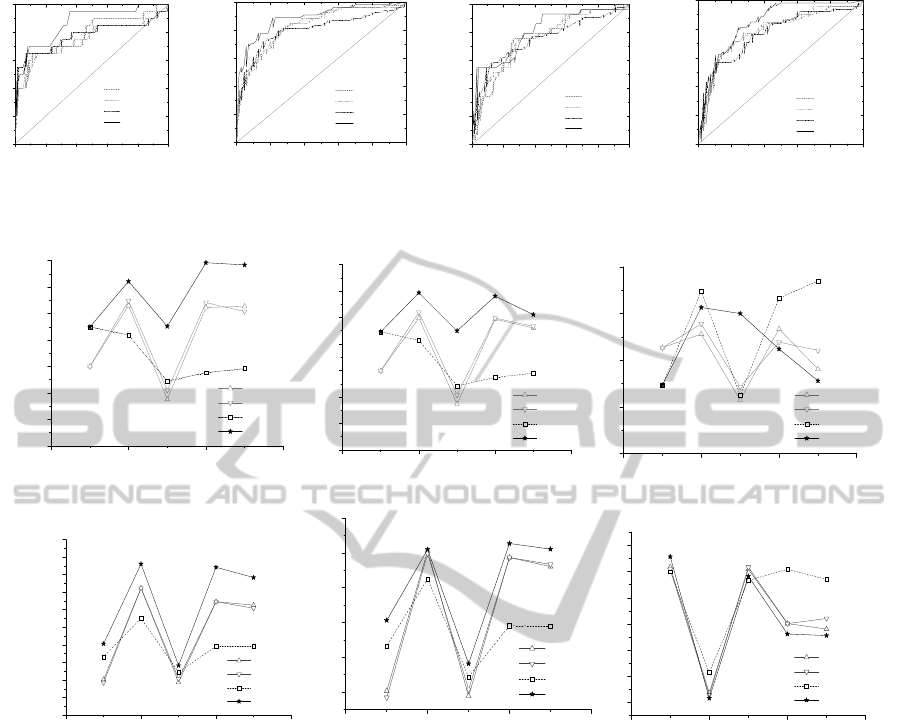
Figure 4: ROC curves of the prediction models (LR, NB and BN) for the chosen Rhino versions.
a) b) c)
d) e) f)
Figure 5: Changes of pd, balance and precision by the cross-validation (a, b, c) and the validations of continual versions (d,
e, f).
Figure 4 shows ROC curves of the prediction
models for the chosen Rhino versions. The ROC of
the BN is mostly closer to the sweet spot and more
convex than those of the LR or NB, which further
indicates its better performance.
5.3 Validation by Continual Versions
For the fault-proneness prediction, a better method
of validation is to use the prediction model learned
from one version to test the next version. This
validation by continual versions is more useful for
testing software developed with a highly-iterative or
agile evolutional strategy (Olague et al., 2007). We
used the models of LR-model 1, LR-model 2, NB-
model 2 and BN learned with the class instances of
the core components of one version to test those of
the next version with the same predictors (1.5R3 for
1.5R4, 1.5R4 for 1.5R5, 1.5R5 for 1.6R1 and 1.6R1
for 1.6R2). Table 9 shows the results.
For Rhino versions 1.5R3 and 1.5R5, all LR, NB
and BN models present a low pd and balance.
However, for these two versions, the BN has a
higher pd and balance than those of LR and NB. For
the other versions (1.5R4 and 1.6R1), the BN
achieves a much better pd and balance. The ROC
areas of all the models are above 0.7, indicating
moderate to high precision.
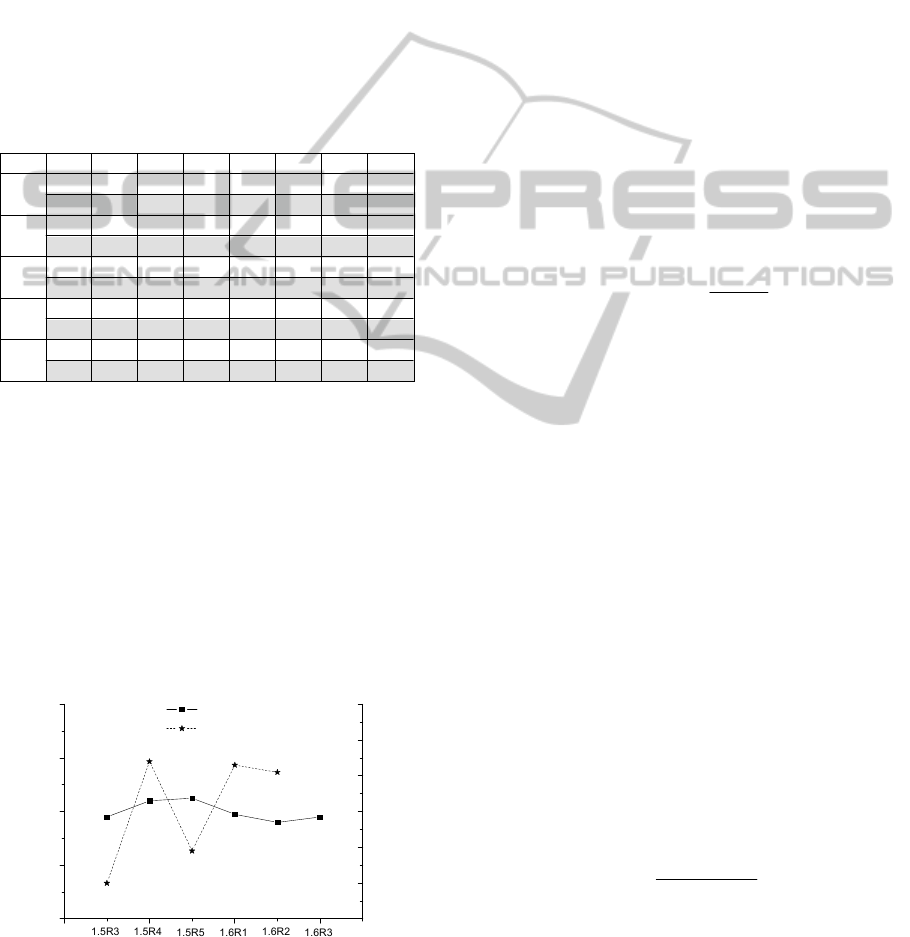
Figure 5 shows changes of pd, balance and
precision of the prediction models in the cross-folder
validation (a, b and c) and the validation of continual
versions (d, e and f). As seen in Figure 5a vs. 5d, 5b
vs. 5e, the pd and balance curves of the models keep
the same shape (two linked “V”) and trend. The
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
LR Model1
LR Model2
NB
BN
Sensitivity (pd)
1-Specificity (pf)
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
LR Model1
LR Model2
NB
BN
Sensitivity (pd)
1-Specificity (pf)
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
LR-Model1
LR-Model2
NB
BN
Sensitivity (pd)
1-Specificity (pf)
0.00.20.40.60.81.0
0.0
0.2
0.4
0.6
0.8
1.0
0.00.20.40.60.81.0
0.0
0.2
0.4
0.6
0.8
1.0
LR Model1
LR Model2
NB
BN
Sensitivity (pd)
1-Specificity (pf)
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
LR-M1
LR-M2
NB
BN
pd
Version
1.5R3
1.5R4
1.5R5
1.6R1
1.6R2
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
LRm1
LRm2
NB
BN
Balance
Version
1.5R3
1.5R4 1.5R5
1.6R1
1.6R2
0.5
0.6
0.7
0.8
0.9
LRm1
LRm2
NB
BN
Precision
Version
1.5R3
1.5R4 1.5R5
1.6R1
1.6R2
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
pd
Version
LR-M1
LR-M2
NB
BN
1.5R3
1.5R4
1.5R5
1.6R1
1.6R2
0.2
0.3
0.4
0.5
0.6
0.7
LRM1
LRM2
NB
BN
Balance
Version
1.5R3
1.5R4
1.5R5
1.6R1
1.6R2
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Precision
LRm1
LRm2
NB
BN
Version
1.5R3
1.5R4 1.5R5
1.6R1
1.6R2
PredictingFault-pronenessofObject-OrientedSystemDevelopedwithAgileProcessusingLearnedBayesianNetwork
13

Table 9: Validation of the Models by Continual Versions.
Version Model pd pf
precision
ROC A rea
balance
1.5R3
LR-model1
0.204 0.014 0.917 0.842 0.204
LR-model2
0.185 0.014 0.909 0.847 0.185
NB-model2
0.333 0.029 0.9 0.779 0.332
BN 0.407 0.014 0.957 0.79 0.407
1.5R4
LR-model1
0.724 0.281 0.438 0.795 0.606
LR-model2
0.724 0.292 0.429 0.795 0.598
NB-model2
0.552 0.156 0.516 0.745 0.526
BN 0.862 0.365 0.417 0.806 0.610
1.5R5
LR-model1
0.189 0.015 0.909 0.822 0.189
LR-model2
0.208 0.015 0.917 0.825 0.208
NB-model2
0.245 0.03 0.867 0.78 0.244
BN 0.283 0.03 0.882 0.758 0.282
1.6R1
LR-model1
0.647 0.215 0.702 0.816 0.587
LR-model2
0.647 0.215 0.702 0.827 0.587
NB-model2
0.392 0.031 0.909 0.818 0.391
BN 0.843 0.338 0.662 0.832 0.627
difference in shape between the pd and balance
curves is not large. Further, the core components of
Rhino version 1.5R5 have the worst prediction
performance either by the cross-folder validation or
the validation of continual versions. According to
the change log of Rhino (Bugzilla, 2005), since
version 1.6R1, there was a major revision (to
support ECMAScript for XML (E4X) as specified
by ECMA 357 standard) which represents a large
change from the earlier versions. This additional
functionality (non-fault cause) may result in the low
pd and balance of the models for this version 1.5R5
when making prediction for the next version, 1.6R1
(Figure 5d and 5e).
As can be seen in Figure 5 (5a vs. 5d, 5b vs. 5e),
the performance of the prediction models (LR-model
1, LR-model 2, NB-model 2 and BN) by the cross-
folder validation is similar to that by the validation
of continual versions. Overall, the performance by
the cross-folder validation is slightly better than that
by the continual validation but for the BN model,
this is not the case for version 1.5R4 and 1.6R1.
Further, the difference in performance of the
prediction models between the cross-folder
validation and the validation of continual versions is
similar. The BN has achieved a better prediction
performance (a larger pd and balance) for each of
the chosen Rhino versions either by the cross-folder
validation or by the validation of continual versions.
The performance of the NB and LR models is
inconsistent (for version 1.5R3 and 1.5R5, NB is
better than LR; but for version 1.5R4 and 1.6R1, LR
is better than NB).
On the other hand, the precision curves of the
prediction models present an unstable trend either by
the cross-folder validation (Figure 5c) or by the
validation of continual versions (Figure 5f). There is
no one model whose precision always keeps a better
value across the releases of the continual versions.
Our analysis suggests that precision is not a good
measure for evaluation of the prediction models due
to its large standard deviations (unstablility)
(Menzies et al., 2007b). Although the BN’s
precision is sometimes not as good as the LR or NB,
it’s larger and more stable pd and balance show that
it is valuable for fault-proneness prediction.
6 CONCLUSIONS
This paper presents a learned BN that is based on the
data mining techniques (i.e. the optimal
discretization and the genetic algorithm) for the
prediction of fault-proneness of the agile OO
systems. D'Ambros et al. (D'Ambros et al., 2012)
illustrated the importance of predictors and Menzies
et. al. (Menzies et al., 2007) showed the importance
of learners such as naïve Bayes. We extended the
previous work by illustrating the improvement of
fault-proneness prediction by learning algorithms for
feature selection and flexible network structure.
Using the continual versions of the open-source
system Rhino, we empirically validated the proposed
prediction model and compare its performance with
LR and NB.
The BN has the advantages of a flexible network
structure and wide choices of the learning and
optimization algorithms. It also avoids the
constraints of LR (logistical-scale linear and
addictive relationships between predictors and the
dependent variable (fault-proneness)), and the
assumptions of NB (the conditional independence
and the normal distributions of predictors). Based on
the 10х10 cross-validation and the validation of
continual versions of the test system, the prediction
results of the BN learned by the GA are positively
encouraging: compared with the NB and LR, the BN
has a better and stable pd and balance. The
comparison between the ROC curves (Figure 4) of
the prediction models also strengthened this
conclusion.
In the previous studies on using BN for fault-
proneness, Liu et al. (Liu et al., 2008 ) used
spanning tree to construct their BN, Fenton et al.
(Fenton et al., 2008) constructed the network based
on the domain knowledge, and Pai and Dugan (Pai
and Dugan, 2007) used LR to construct and
parameterize their BN model. Compared with the
previous studies, we adopted optimal discretization
and genetic algorithm (GA) to improve the network
(avoiding missing of domain knowledge for
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
14

construction of network and local optimization since
GA is a globally optimal solution).
By the validation of continual versions, the
learned BN method is particularly valuable for the
quality evaluation of the OO systems developed with
the highly-iterative or agile strategy.
There are several threats to validity. The first
threat is that only version series of one software
product (Rhino) were used to train and test the
model. But the paper’s focus is on examination of
the learners in agile process software (not
generalization of the method to general software
modules). We have examined our models across
other different software products and statistically
demonstrated our approach’s advantages in a
previous study (Li and Leung, 2011). The second
threat is that selection of different predictive factors
for different models may damage the validity of the
models. But learning was conducted to get the
optimal prediction performance. Using the same
methods of feature selection and optimal learning
algorithms for different models, the prediction
performance of the models could be comparable no
matter what different predictors were used.
In the future, we will explore the following aspects:
Using additional benchmark datasets (Basili et
al., 1996; Menzies et al., 2007; Pai and Dugan,
2007) from public domain, we will conduct more
empirical validation of the BN in comparison
with other models for the fault-proneness
prediction. This can determine the superiority
and stability of BN for the quality assessment of
agile software.
Given the many data mining and optimization
algorithms, we will explore the effects of
different algorithms on the prediction.
We will investigate the applicability of BN for
the prediction of other aspects (e.g. reliability) of
software quality, using additional metrics (e.g.
slice-based cohesion and coupling) and
qualitative factors.
ACKNOWLEDGEMENTS
This research is partly supported by the Hong Kong
CERG grant PolyU5225/08E, NSFC grant
1171344/D010703, MOST grants (2012CB955503
and 2011AA120305–1).
REFERENCES
Ambler, S. W., R., J., 2002. Agile Modeling: Effective
Practices for Extreme Programming and the Unified
Process. John Wiley & Sons.
Basili, V. R., Briand, L. C., Melo, W. L., 1996. A
validation of object-oriented design metrics as quality
indicators. IEEE Transactions on Software
Engineering 22, 751-761.
Bouckaert, R. R., 1995. Bayesian Belief Network: from
Construction to Inference.
Boyd, N., 2007. Rhino home page.
Briand, L. C., Wust, J., Daly, J. W., Porter, D. V., 2000.
Exploring the relationships between design measures
and software quality in object-oriented systems.
Journal of Systems and Software 51, 245-273.
Bugzilla, D., 2005. Mozilla Foundation.
Cardoso, J., 2006. Process Control-flow Complexity
Metric: An Empirical Validation, IEEE International
Conference on Services Computing (IEEE SCC 06).
IEEE Computer Society, Chicago, pp. 167-173.
Chidamber, S. R., Kemerer, C. F., 1994. A metrics suite
for object-oriented design IEEE Transactions on
Software Engineering 20, 476-493.
Cohn, C., 2006 Agile Alliance Home Page.
CYVIS, 2007. CYVIS.
D'Ambros, M., Lanza, M., Robbes, R., 2012. Evaluating
defect prediction approaches: a benchmark and an
extensive comparison. Empirical Software
Engineering 17, 531-577.
Dirk, V. P., Bart, L., 2004. Customer Attrition Analysis
for Financial Services Using Proportional Hazard
Models. European Journal of Operational Research
157, 196-127.
Elomaa, T., Rousu, J., 1996. Finding optimal multi-splits
for numerical attributes in decision tree learning,
ESPRIT Working Group, NeuroCOLT Technical
Report Series, pp. 1-16.
Fenton, N., Neil, M., Marsh, W., Hearty, P., Radlinski, L.,
Krause, P., 2008. On the effectiveness of early life
cycle defect prediction with Bayesian nets Empirical
Software Engineering 13, 499-537.
Gokhale, S. S., Lyn, M. R., 1997. Regression tree
modeling for the prediction of software quality, Proc.
Of Third ISSAT Intl. Conference on Reliability,
Anaheim, CA, pp. 31-36.
Guo, L., Ma, Y., Cukic, B., Singh, H., 2004. Robust
prediction of faultproneness by random forests, the
15th International Symposium on Software Reliability
Engineering. IEEE Computer Society, Washington,
DC, pp. 417- 428.
Harrison, R., Counsell, S., Nithi, R., 1998. An Evaluation
of the MOOD Set of Object Oriented Software Metrics.
IEEE Transaction on Software Engineering 24, 150-
157.
Heeger, D., 1998. Signal Detection Theory.
Herbsleb, J. D., 2001. Global software development. IEEE
Software 18, 16-20.
Hosmer, D., Lemeshow, S., 2000. Applied Logistic
Regression, 2 ed. John Wiley and Sons.
PredictingFault-pronenessofObject-OrientedSystemDevelopedwithAgileProcessusingLearnedBayesianNetwork
15

John, G. H., Langley, P., 1995. Estimating continuous
distributions in Bayesian classifiers, the Eleventh
Conference on Uncertainty in Artificial Intelligence,
San Mateo, pp. 338-346.
Kabli, R., Herrmann, F., McCall, J., 2007. A Chain-Model
Genetic Algorithm for Bayesian Network Structure
Learning, GECCO, London.
Korb, K. B., Nicholson, A. E., 2004. Bayesian Artificial
Intelligence. Chapman & Hall/CRC.
Larranaga, P., Murga, R., Poza, M., Kuijpers, C., 1996.
Structure Learning of Bayesian Network by Hybrid
Genetic Algorithms, in: Fisher, D., Lenz, H.J. (Eds.),
Learning from Data: AI and Statistics. Springer-
Verglag.
Li, L., Leung, H., 2011. Mining Static Code Metrics for a
Robust Prediction of Software Defect-Proneness,
ACM /IEEE International Symposium on Empirical
Software Engineering and Measurement Aneheim, CA
Liu, Y., Cheah, W., Kim, B., Park, H., 2008 Predict
softare failure-prone by learning bayesian network
International Journal of Advanced Science and
Technology 1, 33-42.
MacKay, D., 2003. Information Theory, Inference and
Learning Algorithms. Cambridge University Press.
McCabe, T. J., 1976. A complexity measure. IEEE
Transactions on Software Engineering 2, 308 - 320.
Menzies, T., Dekhtyar, A., Distefano, J., Greenwald, J.,
2007b. Problems with precision: a response to
"comments on 'data mining static code attributes to
learn defect predictors'". IEEE Transactions on
Software Engineering 33, 637-640.
Menzies, T., Greenwald, J., Frank, A., 2007. Data mining
static code attributes to learn defect predictors. IEEE
Transactions on Software Engineering 33, 2-13.
Olague, H. M., Etzkorn, L. H., Gholston, S., Quattlebaum,
S., 2007. Empirical validation of three software
metrics suites to predict fault-proneness of object-
oriented classes developed using highly iterative or
agile software development processes. IEEE
Transactions on Software Engineering 33, 402-419.
Pai, G. J., Dugan, J. B., 2007. Empirical analysis of
software fault content and fault proneness using
Bayesian methods. IEEE Transactions on Software
Engineering 33, 675-686.
Quinlan, J. R., 1993. C4.5: Programs for Machine
Learning. Morgan Kauffman.
Singh, Y., Kaur, A., Malhotra, R., 2008. Predicting
software fault proneness model using neural network
Lecture Notes in Computer Science 5089, 204-214.
Singh, Y., Kaur, A., Malhotra, R., 2009. Software fault
proneness prediction using support vector machines,
Proceedings of the World Congress on Engineering
London, UK.
Singh Y., Kaur, A., Malhotra, R., 2009. Application of
Decision Trees for Predicting Fault Proneness,
International Conference on Information Systems,
Technology and Management-Information Technology,
Ghaziabad, India.
Spinellis, D., 2006. Code Quality: The Open Source
Perspective. Addison Wesley.
ICEIS2013-15thInternationalConferenceonEnterpriseInformationSystems
16
