
The G.O.A.L. Approach
A Goal-Oriented Algebraic Language
Jérôme Dantan
1,2
, Yann Pollet
1
and Salima Taibi
2
1
CEDRIC, CNAM, Paris, France
2
LAMSAD-Agri'terr, Esitpa-APCA, Mont-Saint-Aignan, France
Keywords: Goal, Algebra, Semantic Web, Ontology, Semantic Web Service.
Abstract: In a global context of sharing information, such as Big Data and cloud computing paradigms, researchers
are developing many means to deal with new data models and algorithms. However, the development and
reuse of these ones is complex because of the heterogeneity of environments, data formats and contexts of
use all around of the world. That's why a way to share and reuse algorithms and treatments through a
common formalism is needed, for both machines and computers. The ultimate goal of our work is to provide
a collaborative platform for not only experts but also machines automatically develop, reuse and chain
treatments, computations and models. For this, we rely on a goal-oriented approach which is associated with
the Semantic Web, to establish a common formalism to design models for worldwide researchers. In this
article, we propose the formalization of our approach thanks to an algebra which is linked to the Semantic
Web standards. Finally, we provide a high-level language dedicated to both computers and experts,
illustrated with examples that are linked to the agriculture domain.
1 INTRODUCTION
Assessing the sustainability of human activities is
becoming a worldwide major concern. In this paper,
we consider examples that belong to the agriculture
domain such as agronomy, ecology, economy,
sustainability modeling, etc. Researchers in the
agriculture domain do not only seek to assess and
improve the performances of farms, but also their
sustainability, through many indicators. The
development and computation of such indicators
require being expert in several areas. Indeed, some
aspects to be treated may be e.g. soil biology, animal
welfare, waste management, economic durability,
sales, etc.
For this, researchers from all over the world
compute data from many sources, both local and
from the Internet, that cannot be used directly, e.g.
data from RDBMS (Relational DataBase
Management Systems) and complex models.
Consequently, many computer programs and
database queries have been developed for
interpreting data. However, they are specific to each
data source but experts need to reuse the code
already written e.g. to extract data from other
sources. That's why they need a common platform
not only for experts design support but also for
computers to assist and/or automate the development
and reuse of treatments, models, etc. Large amounts
of data and treatments that are stored on the Internet
and from disparate sources must be computed,
according to a common formalism that we propose
in this paper.
The remainder of this article is structured as
follows: in section 2 we provide a state of the art. In
section 3, we present the features of our approach.
Then, in sections 4 and 5, we respectively provide
definitions and algebra we have defined. In section
6, we introduce he high-level language we have
developed, illustrated with examples in agriculture.
Finally we conclude in section 7.
2 STATE OF THE ART
Our approach involves several areas in software
engineering. We need to index treatments and data
though a common formalism. This common
formalism must be understandable for both humans
and machines. We have identified two
complementary approaches that may meet our
expectations. First of all, the goal-oriented
approaches are usually used to formalize a problem
thanks to hierarchies of goals. Then the Semantic
173
Dantan J., Pollet Y. and Taibi S..
The G.O.A.L. Approach - A Goal-Oriented Algebraic Language.
DOI: 10.5220/0004447401730180
In Proceedings of the 8th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE-2013), pages 173-180
ISBN: 978-989-8565-62-4
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Web approaches make models understandable by
both machines and humans, with the objective to
reuse software components.
2.1 The Goal-oriented Approaches
The existing goal-oriented approaches are intended
to formalize a problem by defining the steps and
components of software design in terms of goals. A
goal is by definition a target to reach, part of the
Requirement Engineering. The way the goal is
achieved is represented by a decomposition of the
goal into sub-goals, which “consists in identifying
goals and refining them into sub-goals until the latter
can be assigned as responsibilities of single agents
such as humans, devices and software” (Letier,
2001). According to (Lapouchnian, 2005), “The
main measure of the success of a software system is
the degree to which it meets its purpose. Therefore,
identifying this purpose must be one of the main
activities in the development of software systems”.
In KAOS (Knowledge Acquisition in autOmated
Specification or Keep All Objects Satisfied), users
are able to structure the goals: each goal, except the
roots, is justified by at least another goal that
explains why the goal was introduced in the model
and each goal, except the leaves, is decomposed in
sub-goals, describing how the decomposed goal can
be reached.
More recently, (Guzelian et al., 2004) describe
the modelling of information systems added to the
methods of object design, with problems “expressed
as goals to be reached and the information system is
the result of a process of meeting these goals”.
Moreover, they present their approach by defining
meta models including decompositions of goals into
refined sub-goals, formalized thanks to UML. A
model, allowing prioritizing and organizing
components with a set of decision trees and a system
of components reuse are proposed. However, neither
algebra nor high level language for goals assessment
is presented.
Finally, the goal-oriented approaches are used in
many fields of software engineering: Requirement
Engineering, business modeling, specification of
reusable components, definition of user models and
development of interactive systems as information
systems on the Web, agent systems, information
retrieval systems, etc (Guzelian et al., 2004).
2.2 The Semantic Web
The Semantic Web (SW or Web of Data) is an
extension of the existing Web, providing access to
computers to structured collections of information
and sets of inference rules that they can use to
achieve automated reasoning (Berners-Lee et al,
2001). For this, the Semantic Web is based among
others on representations of human knowledge based
on domain ontologies and semantic web services,
which are autonomous computing entities that
compute semantically indexed data.
According to (Castellani et al, 2011), Ontologies
offer significant benefits to collaborative service-
oriented systems, such as interoperability and
reusability. They are usually used as an index to
retrieve specific data (Garcia and Celma, 2005), to
infer new knowledge (W3C, 2012) (Berners-Lee et
al., 2001), to semantically annotate multimedia data
(Castano et al., 2007), to find out Web Services
automatically (Martin et al., 2007), or to match
knowledge with other knowledge for a more general
purpose (Cruz and Nicolle, 2011). Furthermore, the
Web Ontology Language (OWL) provides model
flexibility, explicit representation of semantics, out-
of-the-box reasoning and freely available
background knowledge (Castellani et al., 2011).
To manage knowledge, the Semantic Web
Services (SWS) are based on semantic description
frameworks for Web Services. The composition of
SWS is the automated processing of Web services
autonomously simple to complex automated
processes. Then, a "generic inference mechanism
shall be developed for handling SWS" (Charif and
Sabouret, 2006). Various technologies exist, such as
OWL-S (W3C, 2004), WSMO (W3C, 2005),
METEOR-S (Sheth et al., 2008), IRS-III (Domingue
et al., 2008), etc. The main drawbacks of these
approaches are that the user must be a computer
specialist, whereas the services composition
solutions are intended to help ordinary users in the
web, and some manual steps must be performed by
the user (Charif and Sabouret, 2006).
2.3 Combining the Approaches
Our goal is not only to analyze the requirements of a
system. Our platform has also to find the ad hoc
compositions of treatments solving both users’ and
computers' requirements, to formalize models,
algorithms and data to assist or automate their reuse,
to assess them, and consequently to be both
worldwide researchers and machine understandable.
In (Dantan et al., 2012), two kinds of virtual
properties have been defined, as an extension of
OWL (W3C, 2012): these virtual properties,
attached to core OWL ontology classes, may be
hierarchically organized goals that have to be
ENASE2013-8thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
174

evaluated. We provide a goal-oriented model that is
linked to the Semantic Web properties. We combine
a core OWL ontology extended by virtual properties
with a goal ontology that contains hierarchically
organised goals and sub-goals. Indeed, we consider
that the assessment of a higher-level goal is achieved
when the assessment of its sub-goals, i.e. the goals at
a more specific level, are achieved. At the below, the
goals are raw data extraction. For this, we first
formalize a rigorous algebra based on well defined
operators and then we provide a common high-level
language for both users and computers to
automatically develop, reuse and chain the
treatments, computations and models.
3 OVERVIEW
We propose a goal-oriented model where each goal
is attached to both the domain ontology, as a “goal
property” and to a semantic goal-oriented service,
according to the following procedures:
(1) A core OWL ontology which is part of the
Semantic Web is used to model the considered
domain. We attach goal assessments as classes’
properties of the selected core ontology, which
consists of an extension of core ontology.
(2) Formalization of data models, algorithms and
non-functional properties in a common formalism
for expressing goals and their assessment, by
defining an algebra and a high level language that is
both machine and human understandable.
(3) Linking with the Semantic Web. Every data
models and algorithms are semantically indexed and
each goal property is defined thanks to an URI
(Uniform Resource Identifier). Thus, each abstract
service is considered as both a URI and a property of
classes from the core ontology. Their concrete
services are considered as their instances (objects).
We therefore structure models, algorithms and data
by using the ontology of goals that are formulated
either by the machine or the user who is not a
computer scientist. The various solutions result from
the various feasible compositions of goals into sub-
goals.
4 DEFINITIONS
In this section, we define the notions of goal, goal
property and goal-oriented service and finally we
illustrate our meta-model.
4.1 Goal
We define a goal as a semantically indexed quantity
to evaluate, that is attached to one or more elements
of real life, e.g. the soil quality of a parcel, the
sustainability of a farm, the sales of a farm, etc.
There are goals defined by composition, i.e. goals
that can be composed into sub-goals, which must be
reached for the higher level goal to be satisfied. In
other words, a process defined by composition of
sub-goals ensures a higher level goal.
4.2 Goal Property
Each goal is linked to a goal property that belongs to
an ontology. A goal property is the assessable
property that is attached to an OWL ontology class.
In other words, we define a goal property as the
projection of an ontology class to an assessable goal
property, such as a datatype property, or a virtual
property (Dantan et al., 2012) that may be either
quantitative or qualitative data.
For example, in the agriculture domain, the
evaluation of the economic durability of a farm is a
goal. The “economic durability” goal property may
be assessable via the projection of the “farm” class
to the “economic durability” goal. The “economic
durability” goal property may be assessed thanks to
(1) simple datatype properties such as the sales or
the surface of a farm, and (2) other goal properties
that are more complex, such as the soil quality
which may be assessed by several algorithms. We
therefore define two main types of goal properties:
(1) Complex: complex processes using quantitative
or qualitative data (e.g. sustainability computations,
complex statistical treatments, etc).
(2) Data: processing of raw data (e.g. subscription to
events such as live results of soil analyses, data
extraction, and aggregate operators).
Finally, a composition of goal properties is a set of
goal properties that are linked thanks to operators
such as “and”, “or”, and aggregate operators, which
leads to a higher level goal.
4.3 Goal-oriented Service
A goal-oriented service is a computer entity which is
the mean both to reach a goal and to assess a goal
property, with inputs and outputs. The function
associated to a goal-oriented service is the model,
treatment, algorithm or simply a datatype property
that evaluates the associated goal property.
The inputs of a goal-oriented service exactly
match the outputs of the sub-goal services that
TheG.O.A.L.Approach-AGoal-OrientedAlgebraicLanguage
175
compose them. Indeed, the principle of approached
matching is not able to provide a service which
actually meets to the need formulated (Pollet, 2010)
(Dantan et al., 2012). We therefore define
compositions of goal properties by enabling either
non computer scientist users or computers to manage
compositions of goal properties in a declarative way.
To do this, the experts of the considered domain first
work in an generic or abstract way, and the technical
details and data restrictions of concrete services are
not known. The discovery and composition of
services are automatically performed. Each generic
goal-oriented service is identified thanks to a URI.
The classes of the ontology are URIs and their
instances are the concrete implementations for a
particular set of data.
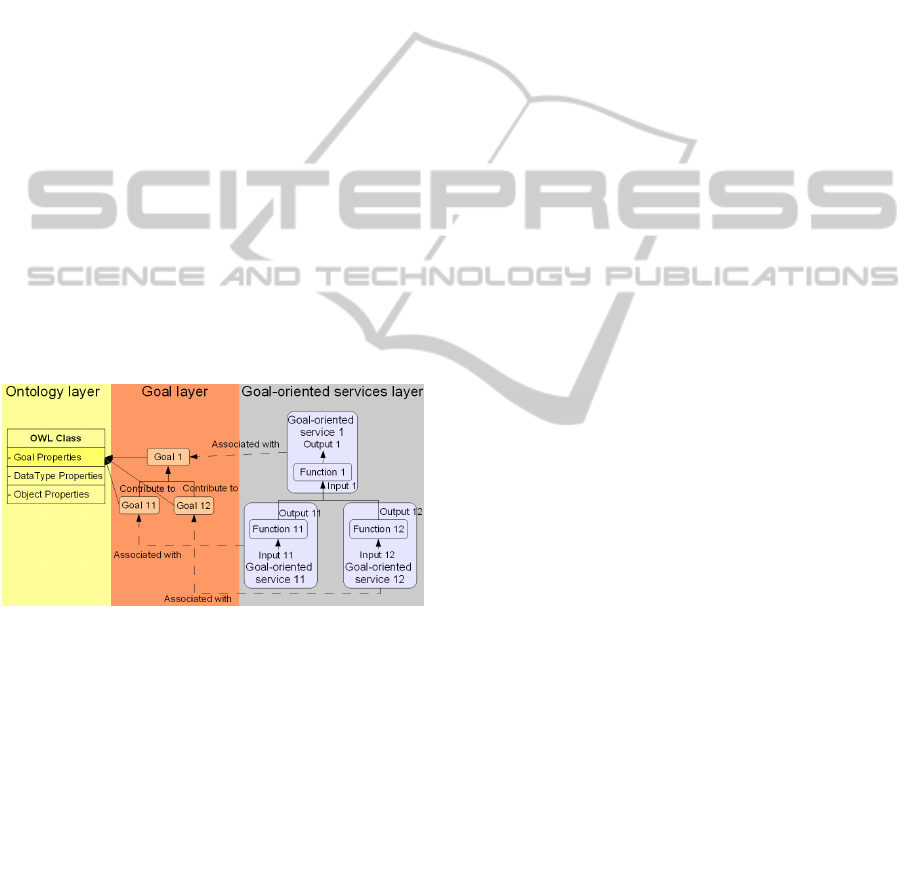
4.4 The Meta-model
The meta-model, which illustrated in figure 1,
contains three layers: (1) the ontology layer that is
the core ontology, extended with the goal properties;
(2) the goal layer that is the hierarchy of goals; their
associated goal properties extend the core domain
ontology; (3) the goal-oriented services layer that
contains the goal-oriented services.
Figure 1: The meta-model.
5 ALGEBRA
We define an algebra that includes operators, which
operate on both ontology classes and properties. We
have built algebraic expressions to express a goal in
a formal way.
In the definitions that will follow; let
C
,
C
1
,
C
2
, …,
C
n
be ontology classes and let
G
,
G
1
,
G
2
, …,
G
n
be one of their respectively attached
goal properties.
In the examples that will follow:
Let “farm”, “parcel” be ontology classes.
Let “sustainability”, “sales” “productivity”,
“economicDurability”, “area”, “culture”,
“ISO14000-sales”, “ISO14000-productivity” be
goal properties attached to both the “farm” class
and classes that are contained in the farm class.
“sales” and “productivity” goal properties
contribute to the “economicDurability” higher
level goal property.
Let “contains” be the contains object property
attached to the farm class.
5.1 Projection of a Class to a Property
We define a projection as a restriction of an
ontology class to one of its properties. The inputs of
the projection operator are either an ontology class
or a property of this class, which can be: (1) either a
goal property. In this case, the result of the
projection is an assessable goal property or (2) an
object property. In this case, the result of the
projection is a set of object properties.
5.1.1 Projection to a Goal Property
The projection of a class to a goal property is
denoted:
π
G
C
, where C is an ontology class and G
is the goal property to which the class is restricted
e.g. the projection of the farm class to its
sustainability goal property. It is denoted:
π
s
ustainability
farm
. The result is the assessable
“sustainability” goal property, attached to the farm
class.
5.1.2 Projection to an Object Property
The projection of an ontology class to an object
property is denoted:
π'
O
C
, where C is an ontology
class and O is the object property to which the class
is restricted. The projection of the farm class to its
“contains” object property is denoted:
π'
contains
farm
. The result is the set of classes that
the farm class contains, e.g. parcels, barns, etc.
5.2 Conjunctions and Disjunctions
The goal-oriented model we propose may express
various solutions to assess a given high-level goal.
These goal properties are basically described thanks
to “and” and “or” logic operators, by building
decisions trees, thus enabling the assessment of a
high-level goal property and defining a complete
process of goals/sub-goals expression. By extension,
in our model, each conjunction/disjunction of goal
property meets one-to-one to their
conjunction/disjunction of goals.
(1) The “AND” conjunction. A goal property is
ENASE2013-8thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
176

achieved when its preconditions are achieved. In fact
we define the achievement of a high level goal
property as a “and” conjunction of lower level goal
properties, denoted:
π
(G
1
)
C
1
∧
π
(G
2
)
C
2
. For instance,
the conjunction of the “sales” and “productivity”
farm goal properties is denoted:
π
s
ales
farm
∧
π
productivity
farm
. We will see that such
conjunction of goals may reach a higher level goal.
(2) The “or” disjunction: when several scenarios of
conjunctions or compositions exist, we express the
alternatives through the “or” conjunction. It means
that each alternative conjunction or composition
below is interchangeable to reach the same goal.
Two alternative compositions are denoted:
π
(G
1
)
C
1
∨
π
(G
2
)
C
2
. So
π
(G
1
)
C
1
and
π
(G
2
)
C
2
are
alternative compositions.
5.3 Chronology
It is possible to define the chronology of sub-goals
and goals, to link goals to sub-goals explicitly thanks
to a temporal conjunction. This may enable the user,
while expressing a request, to suggest its preferences
to the composition engine and to other users. The
composition engine of services can achieve the
higher level goal property only if its precondition
goal-properties (sub-goals), have been achieved. So,
a composition of sub-goals
(π
(G
1
)
C
1
... π
(G
n
)
C
n
)
leading to a higher level
goal
π
G
C
is denoted as follows:
(π
(G
1
)
C
1
... π
(G
n
)
C
n
) →π
G
C
(1)
For example, the conjunction of the farm goal
properties mentioned just before, leading to the farm
economic durability are denoted as follows:
π
sales
farm
∧
π
productivity
farm
→π
economicDurabilit
y
farm
(2)
5.4 Aggregates
The standard relational algebra aggregates are: sum,
average, minimum, maximum and count. Each
aggregate has a list of assessable goals for input and
has an assessed goal for output. An aggregate
function is denoted:
AGG(π
G
C )
, where AGG is
one of the following aggregate operators: SUM,
AVG, MIN, MAX and COUNT.
5.5 General Example
The following example is a combination of the cases
already mentioned. Suppose that the sum of the
productivities of the classes that compose a farm is
“equivalent” to the whole productivity of a farm.
The conjunction of the farm goal properties
mentioned just before, with the sum of productivities
alternative conjunction about the classes that are
contained into the farm, leading to the farm
economic durability are denoted as follows:
π
sal es
f
arm
∧
(π
productivity
f
arm
∨
SUM(π
productivi ty
(π
'
contains
f
arm)))
→π
economicDurabilit
y
farm
(3)
Note that the use of the SUM operator involves that
we take into consideration the whole classes that
may be included in the farm.
5.6 Restriction
The restriction operator selects a composition of
goal properties for given sets of goal properties. So,
the restriction is performed through a restriction
expression expressed thanks to a particular
conjunction of assessed goal properties. The
restriction of a composition of goal properties is
denoted:
σ
R
(
∧
C
i
)
, where
(
∧
C
i
)
is a composition
of goals and R is the restriction expressed thanks to
a conjunction of goals, as defined above. The
restriction operator requires the evaluation of the
composition of goal properties, e.g. the restriction of
the economic durability composition, restricted to
the farms that belong to the Normandy area and that
cultivate potatoes is denoted as follows:
σ
( π
( area= normandy)
farm
∧
π
(cu ltu r e = p o ta to es )
farm)
(4)
(π
s
ales
farm
∧
π
p
roductivit
y
farm →π
economicDurabilit
y
farm)
5.7 Operator and Property Overload
Goal properties and aggregate operators can be
overloaded either by taking into account either
theoretical implementations or new input/output
data. They are not theoretically implemented yet but
may overload the existing goal properties, e.g. by
inheritance, or by aggregate operators overloading,
taking account of specific computing methods or
new data types.
(1) The overload of a goal property is specified by
adding a "+" as exponent:
π
(G
+
)
C
.
(2) The overload of an aggregate operator is
specified by adding a "+" as exponent:
AGG
+
(π
G
C )
.
Examples: (1) the “agronomicSustainability” parcel
goal property may be overloaded by the
“agronomicSustainability” goal property of a farm.
(2) The “MAX” aggregate operator that extracts the
TheG.O.A.L.Approach-AGoal-OrientedAlgebraicLanguage
177

maximum from a set of quantitative values may be
overloaded to extract the maximum from a set of
qualitative values, by implementing a new way to
compute them.
5.8 Inheritance
Inheritance is a specialization of a goal that is
different from a “restriction” which restricts a goal
property to a particular data set, as a geographical
area e.g. inheritance rather enables to declare a new
goal from another specializing it "functionally", e.g.
based on a particular standard. Sub-goals that
compose a higher level goal may correspond to
several computations in addition to potential
restrictions on a data set. The inheritance of a goal
property from another goal property can be
explicitly formulated by new operations on goal
properties. It is denoted:
π
G
C ←π
(G')
C
, where G'
is the goal property inherits from G.
For example, the "ISO14000-sustainability" farm
goal property inherits from the "sustainability" farm
goal property because it specializes it by achieving
their computations according to ISO14000 standards
which defines standards for environmental
management. The inheritance of farm ISO14000-
sustainability from farm sustainability is denoted as
follows:
π
s
ustainability
farm ←π
ISO14000-sustainabilit
y
farm
(5)
5.9 Goal-equivalence
Two conjunctions of goal properties are called
equivalent if they both contribute to the same goal
property whatever restrictions that can be applied to
them. The goal-equivalence of two goal properties is
denoted:
π
(G
X
)
C = π
(G
Y
)
C
, where
G
X
and
G
Y
are
two goal properties from two goal-equivalent
compositions. The goal-equivalence relation is an
equivalence relation (reflexive, symmetric,
transitive). The following conjunctions are goal-
equivalent:
((π
( ISO14000− sal e s)
f
ar
m
)
∧
(π
( ISO14000− productivity )
f
arm))
=
(π
(
I
SO14000−
s
ales
)
farm
∧
SUM(π
(
I
SO14000−
p
roduct ivit
y
)
(π'
contai ns
farm)))
(6)
Explanation: one of the criteria of ISO 14000 is just
to retrieve all the data related to their goals that are
available and consequently the sub-goals are
theoretically always satisfied. So, they both satisfy
the higher-level goal property:
π
( ISO14000− economicDurability )
farm
, regardless of the
restrictions that can be applied to them.
5.10 Goal-sub-Equivalence
Two conjunctions of goal properties are called goal-
sub-equivalent if they both contribute to the same
goal property, restricted to a particular conjunction
of assessed goal properties. The goal-sub-
equivalence of two goal properties is denoted:
GG
XY
π C π C
, where C is an ontology
class,
G
X
and
G
Y
are two goal properties from two
equivalent compositions. The goal-sub-equivalence
relation is an equivalence relation (reflexive,
symmetric, transitive). The following conjunctions
are goal-sub-equivalent:
salesfarm productivity
π
area= normandy culture= potatoes
π
country=normandy culture= potatoes
containssales productivity
σππfarm
farm π farm
σ
farm π farm
π farm SUM ππ'farm
(7)
Explanation: in the area of Normandy all potatoes
fields have all the data related to their goals that is
available and consequently the sub-goals are
theoretically always satisfied. So, they both satisfy
the higher-level goal property, for farms that
cultivate potatoes in Normandy:
ISO14000 economicDurability
π
area=normandy culture=potatoes
σπfarm
farm π farm
(8)
5.11 Priorities of Operators
Parentheses may prioritize the operators. However,
this is the list of operators in decreasing order of
priority: Projection, And, Or, Then, Restriction. The
priorities for aggregate, overload, inheritance, goal-
equivalence and goal-sub-equivalence are not
applicable because they must be explicitly defined
with parenthesis.
6 THE G.O.A.L
To compose the goals, their attached goal properties
and goal-oriented services, we have specified a both
user and machine understandable high-level
language. We have called this language Goal
Oriented Algebraic Language (G.O.A.L); it relies on
the algebraic operators we have just defined.
6.1 Syntax
Table 1 summarizes the syntax of both our algebra
and our high-level language operators.
ENASE2013-8thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
178

Table 1: Algebraic and GOAL notation.
Operator name Algebraic operator GOAL notation
Projection
π
. (dot)
Aggregates
SUM AVG MIN
MAX COUNT
SUM AVG MIN, MAX
COUNT
And
∧
AND
Or
∨
OR
Then
→
THEN
Restriction
σ
WHERE
Overload
+
exponent
SUPER
Inheritance
←
EXTENDS
Goal-equivalence
=
EQUIVALENT_TO
Goal-sub-
Equivalence
SUBEQUIVALENT_TO
6.2 Examples
Here are some examples linked to agriculture. In the
examples that will follow:
Let “farm”, “territory” be ontology classes.
Let “sustainability”, “sales”,
“productivity”,“economicDurability”,
“metalRate” “pesticideRate”, “country”,
“culture”, “ISO14000-sales”, “ISO14000-
productivity”, “ISO14000-sustainability” be goal
properties attached to the “farm” class.
Let “confidentiality” and “reliability” be non-
functionnal properties.
“sales” and “productivity” goal properties
contribute to the “economicDurability” higher
level goal property.
Let “contains” be the contains object property
attached to the farm class.
6.2.1 Projection, Aggregate, Conjunction
and Disjunction Operators
The generic sustainability property of the farm class
can be expressed as follows:
(farm.sales AND (farm.productivity OR
farm.contains.?).productivity)
THEN farm.economicDurability
6.2.2 Complex Goal-oriented Services
Some goal properties are expressible through more
complex statistical operators, e.g. the landscape of
an area may be inferred from a decision tree whose
leaves are sub-goals, such as metal rates and
pesticide rates:
DECISION_TREE(AVG(territory.metalRate) AND
AVG(territory.pesticideRate))
THEN territory.landscape
6.2.3 Restriction
The concrete services are expressed by adding a
“WHERE” restriction clause with functionnal
properties, following the generic term of the goal
property. Next, a non-functionnal clause such as
QoS can be specified by adding a “WITH”
restriction clause, e.g.:
((farm.sales AND (farm.productivity)
THEN farm.economicDurability)
WHERE (farm.country=France AND
farm.culture=potatoes)
WITH (farm.sales.confidentiality=high AND
farm.productivity.reliability=medium)
6.2.4 Goal-equivalence
Two conjunctions of goal properties are called
equivalent if they both contribute to the same goal
property whatever restrictions that can be applied to
them, e.g.:
(farm.ISO14000-sales AND farm.ISO14000-
productivity)
EQUIVALENT_TO
(farm.ISO14000-sales AND SUM
(farm.contains.?)).ISO14000-productivity
The compositions below are equivalent because one
of the criteria of ISO 14000 is just to own all the
data related to their sub-goals, that are theoretically
always satisfied.
6.2.5 Inheritance
The "ISO14000-sustainability" farm goal property
inherits from the "sustainability" farm goal property:
farm.ISO14000-sustainability
EXTENDS farm.sustainability
6.2.6 Goal-sub-Equivalence
Two conjunctions of goal properties that are goal-
sub-equivalent are denoted as follows:
((farm.sales AND farm.productivity)
THEN farm.durability)
SUBEQUIVALENT_TO
((farm.sales AND SUM
(farm.contains.?).productivity) THEN
farm.durability)
WHERE (farm.area=normandy AND
farm.culture=potatoes)
The compositions below are equivalent because, in
the area of Normandy, all data fields of potatoes
required for the satisfaction of all the sub-goals of
TheG.O.A.L.Approach-AGoal-OrientedAlgebraicLanguage
179

these compositions are available.
7 CONCLUSIONS
In a nutshell, we have presented the association
between a goal-oriented approach and the Semantic
Web. To formalize our approach, we have proposed
an algebra which is linked to OWL ontologies
classes and properties. Then, we have provided a
high level language called Goal-Oriented Algebraic
Language (GOAL), dedicated to both computers and
experts and based on our algebra. Finally, we have
illustrated our approach thanks to examples, linked
to agriculture. Future challenges are to provide an
ontology and actual use cases about the goal-
oriented Web services.
REFERENCES
Letier, E., 2001. Reasoning about Agents in Goal-
Oriented Requirements Engineering, Phd Thesis.
Université Catholique de Louvain, Dépt. Ingénierie
Informatique, Louvain-la-Neuve, Belgium.
Lapouchnian, A., 2005. Goal-Oriented Requirements
Engineering: An Overview of the Current Research.
Depth Report, University of Toronto.
Guzelian G., Cauvet C., Ramadour P., 2004. Conception
et réutilisation de composants : une approche par les
buts. In INFORSID 2004, 179-174.
Berners-Lee, T., Hendler, J., and Lassila, O., 2001. The
Semantic Web. Scientic American, 284(5):35-43.
Castellani, S. et al, 2011. A knownledge-based system to
support legal case construction. In Knowledge
Engineering and Ontology Development conference.
Paris, France: 15-27, may 2001.
Garcia, R., Celma, O., 2005. Semantic Integration and
Retrieval of Multimedia Metadata. In 4rd
International Semantic Web Conference, Galway,
Ireland.
World Wide Web Consortium (W3C), 2012. OWL 2 Web
Ontology Language Document Overview (Second
Edition) http://www.w3.org/TR/owl2-overview/.
Castano, S. et al, 2007. Ontology Dynamics with
Multimedia Information: The BOEMIE Evolution
Methodology. In International Workshop on Ontology
Dynamics (IWOD) ESWC 2007 Workshop. Innsbruck,
Austria.
Martin, D et al, 2007. Towards Semantic Annotations of
Web Services: OWL-S from the SAWSDL
Perspective. Proceedings of OWL-S Experiences and
Future Developments Workshop at ESWC 2007.
Innsbruck, Austria.
Cruz, C. and Nicolle, C., 2011. A graph-based tool for the
translation of xml data to OWL-DL ontologies. In
Knowledge Engineering and Ontology Development
(KEOD) IC3K 2011 conference. Paris, France, pp.
361-364.
Charif, Y., Sabouret, N., 2006. An Overview of Semantic
Web Services Composition Approaches. Electronic
Notes in Theoretical Computer Science. Volume 146,
Issue 1, 24 January 2006, 33-41.
World Wide Web Consortium (W3C), 2004. OWL-S:
Semantic Markup for Web Services
http://www.w3.org/Submission/OWL-S/.
World Wide Web Consortium (W3C), 2005. Web Service
Modeling Ontology (WSMO) http://www.w3.org/
Submission/WSMO/.
Sheth, A. P., Gomadam, K., Ranabahu, A., 2008.
Semantics enhanced services: METEOR-S, SAWSDL
and SA-REST. In IEEE Data Engineering Bulletins,
31(3):8-12, 2008.
Domingue, J. et al., 2008. IRS-III: A broker-based
approach to semantic web services. Journal of Web
Semantics, 6(2) :109-132, 2008.
Dantan, J., Pollet, Y., Taibi, S., 2012. Semantic Indexation
of Web Services for Collaborative Expert Activities,
IADIS International Conference on Information
Systems 2012
, pp.57-64.
Pollet, Y., 2010. Une approche algébrique pour la
réutilisation et l’orchestration de services dans les
systèmes d’information. Revue Ingénierie des
Systèmes d'Information. Journal Revue Ingénierie des
Systèmes d'Information, vol. 15(5), pp. 63-88, 2010.
Levy, N., Losavio, F., Matteo, A., Ramdane-Cherif, A.,
Hadj Salem, H., 2011. Quality Standards Ontology for
Web Service Discovery, In XXXVII Conferencia
Latinoamericana de Inforática (CLEI 2011), October
2011, pp.625-624, Quito, Ecuador.
ENASE2013-8thInternationalConferenceonEvaluationofNovelSoftwareApproachestoSoftwareEngineering
180
