
A Shooting Simulator from Boats
Pablo Figueroa
1
, Carlos Francisco Rodriguez
2
, Jose Tiberio Hernandez
1
, Juan Camilo Blanco
2
,
Raul Oses
1
and Luis Ballesteros
1
1
Systems and Computing Department, Los Andes University, Cra 1 N 18A- 12, Bogota, Colombia
2
Mechanical Engineering Department, Los Andes University, Cra 1 N 18A- 12, Bogota, Colombia
Keywords:
Virtual Simulation, Shooting Trainer, Military Training.
Abstract:
We present a simulator for militar fluvial boats, in which we concentrate in the task of shooting. Shooting
from a boat is particularly challenging, due to rapid movements, river conditions, and special considerations
that should be taken into account for a shooters security. We present a hardware platform that simulates boat
movements under different scenarios. On top of such platform, a user is able to freely move around, aim a
target, and shoot by using a handle that holds a display and replicates a large gun. Our system can also report
metrics related to a users performance. This paper presents the main hardware and software components, the
main tasks we would like to address in our simulator, the information in users reports, and some preliminary
tests of the implemented functionality.
1 INTRODUCTION
The Virtual Reality (VR) community has been car-
rying out research in shooting simulators for a long
time. The advantages that VR shooting simulators
have for training over traditional methods in real life
are unquestionable, and there are several commercial
products in this field. One area that has not been
studied enough is shooting from rapid boats, where
a shooter has to aim at targets at both sides of a river
while another person drives. This task requires co-
ordination between people inside the boat in order
to avoid hazards and facilitate the shooter’s task. It
also requires a lot of skills from a shooter, since boat
movements could be very fast and it could be very
difficult to aim at the targets. A simulator for this sit-
uation could be very useful not only for River-based
Armed Services but also for entertainment purposes
in large video arcades.
This work concentrates on a simulator for a
shooter on a fast boat. We simulate the boat’s move-
ments at high speed, some stimuli from the river, and
people at the river’s banks, both foes and friends.
Since our main purpose is to provide a simulator for
shooting, we do not include a driver. Instead, we use
pre-recorded data from a real boat in order to move
our simulator as similar as possible to a real situation.
This paper is divided as follows. First, we cite
some related work. We then describe the main com-
ponents of our simulator, such as the motion platform,
the shooter interface, the simulation software, and the
reporting system. Later we present some preliminary
results of tests with experts, and finally we present
some conclusions and future work.
2 RELATED WORK
Simulation Systems in the Military field have been
broadly used. Here we first mention some general
references to this topic, then we introduce some ex-
amples of related simulators, and finally we mention
some shooting simulators and how they relate to our
work.
There are several works that describe specific top-
ics in any military simulation. In (Smith, 1998) , for
example, a small taxonomy and a global architecture
for simulators are presented. (Page and Smith, 1998)
presents an introduction to military training simula-
tion with a very useful glossary that has been used in
many other works. This article enumerates the fol-
lowing problems that developers of simulators face,
which will be addressed by our work also:
• Domain architectures, or how to re-use standard
simulator architectures to accelerate the develop-
ment process and maintainability.
• Terrain, or how terrain data will be represented
88
Figueroa P., Rodriguez C., Hernandez J., Blanco J., Oses R. and Ballesteros L..
A Shooting Simulator from Boats.
DOI: 10.5220/0004662200880095
In Proceedings of the 9th International Conference on Computer Graphics Theory and Applications (GRAPP-2014), pages 88-95
ISBN: 978-989-758-002-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

among a wide variety of options.
• Behavior representation, or how artificially in-
teligent entities are represented within a simula-
tor.
• Natural environment, or how to replicate natural
environment data in a simulation.
Some boat simulators have been developed in re-
cent years. For example, the Motion Based Sailing
Simulator (Avizzano et al., 2010) includes fundamen-
tal interaction stimuli and environmental phenomena
such as wind and sea conditions, vessel configuration,
and actions performed by drivers on real maneuvers.
This simulator takes into account a dynamic model
for water and wind that considers 6 degrees of free-
dom (DOF). (Yang, 2008) proposes a mode for eval-
uation of sailor’s skills. In such a mode, formulas
based on fuzzy logic assess a driver’s steering ma-
neuvers and measure deviations from a desired boat’s
heading, course plan, and secure operating thresholds.
(Perez et al., 2006) presents a Simulink tool for rapid
prototyping of Maritime systems. It includes models
for ships, underwater vehicles, and floating structures.
Overall, it provides models for guidance, navigation,
and control of real time ship simulations.
(Bruzzone et al., 2012) presents a simulator for
both ship pilots and port operators. An operator can
inform a pilot about location of other ships and port
congestion status. This simulator can track how a pi-
lot behaves in his entrance to a port, the time spent
in a port, docking time, and his interaction with other
ships and vessels around. This work is mainly aimed
to the simulation of large vessels in their process of
approaching to a port. (McKenna and Little, 2000)
presents a Submarine simulator where the simulation
focus on submarine engagement. This task can take
several hours in real life due to the complex process of
information gathering before any move can be taken.
This simulator replicates the data gathering process in
real life, and allows users to make decisions based on
a situation. One of its main features is its capability of
speed up the simulation time in order to concentrate
users in the crucial decision making points. (Mertens,
1993) describes an application for High Commander
Officers. In such a simulator, Officers are involved in
a battlefield situation that force them to make deci-
sions and communicate to their superiors and subor-
dinates.
There are not many references to shooting sim-
ulators in the academic field. Most of the refer-
ences we found are commercial systems and some
patents such as (Stephen P. Rosa, 2003; Lvovskiy,
2005; Seet et al., 2001; Takeda et al., 1999; Wang
et al., 1996). Eurosimulator (Dahlberg, 2012) is a
Web based simulator that offers a variety of weapons
such as pistols, rifles, and revolvers in several in-
door and outdoor scenarios. ShotPro 2000 (TRO-
JAN, 2012) allows shooting animated targets in natu-
ral scenarios and uses quadraphonic sound. Shooter-
Ready (Christensen, 2000) is a long range simulator
designed to train how environment variables affect a
bullet’s course.
CAPS (Young, 2013) is a shooting simulator for
training police officers which are challenged under
special situations to use not only their decision mak-
ing skills but also their guns. This simulator shows
different scenarios on a projection surface, and users
have to react to such situations by sometimes firing
their real weapons with rubber bullets. Noptel 2000
(Supply, 2013) is a training system for army forces
that provides two modes of operation: interior train-
ing for basic shooting and exterior training for com-
bat situations. An interesting aspect of this simulator
is the use of a small device that clearly shows tar-
gets by reflecting a laser light on them. Finally, a
live fire,multiscreen simulator is used by the Cleve-
land and Durham Police Authority in the UK (Sys-
tems, 2013) in order to expose police officers to a con-
trolled scenario where they can practice their shooting
skills.
Most of these simulators train their subjects in the
use of hand weapons of both short and long range by
showing specific scenarios where subjects have to de-
cide when and where to shoot at. These simulators
place shooters in a closed virtual space with limited
movements. Most subjects in these simulators are
stationary. These characteristics differ from our pro-
posal, in which we want to recreate the conditions that
shooters have in a moving boat that follows a river
course where targets could be moving.
3 DEVELOPMENT
We present in this section details of our shooting sim-
ulator for fast boats. We divide this description in four
main components, the motion platform that simulates
a boat’s movements, the shooter interface that simu-
lates a gun and measures shooter actions, the report-
ing system that gives information of a shooter’s per-
formance, and the simulation software that receives a
user’s movements, defines environment stimuli, and
produces visual and auditory feedback.
3.1 Motion Platform
The motion platform is composed by two main ele-
ments: a shooter interaction space and a robot that
AShootingSimulatorfromBoats
89
produces simulated boat’s movements. These ele-
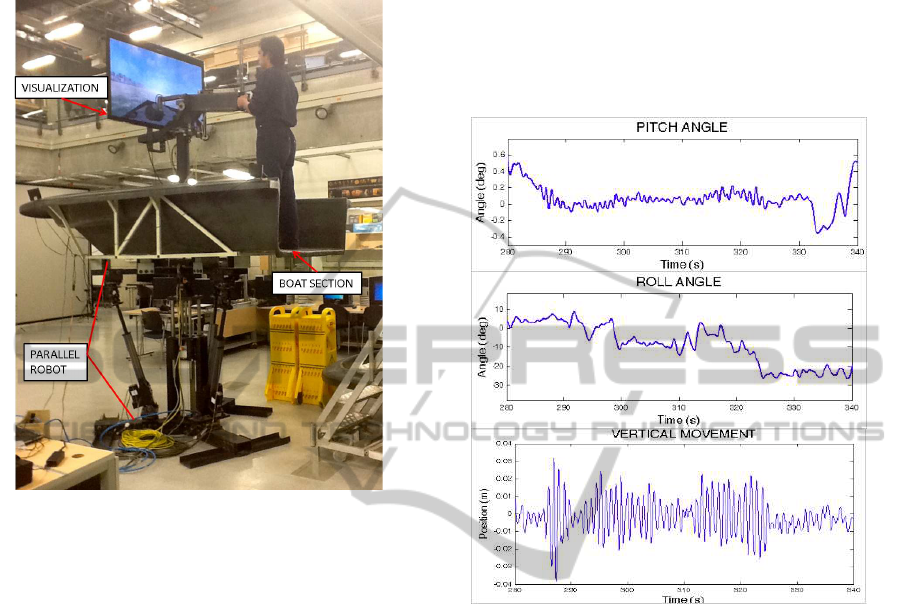
ments are depicted in Figure 1
Figure 1: General Elements of Our Simulator.
We wanted feedback from our simulator to be as
real as possible. For that reason, we designed a real
replica of the gun’s handle so users can hold it in the
same way as the real one. We also allow the type
of movements that such a gun has in a real boat, so
it can be aimed to both banks of a river. Finally, a
section of a real boat is replicated in order to allow
trainees to have the same range of movements than in
a real boat. All these elements are mounted on top of
a robot that is capable of lifting all these equipment
plus a trainee. We concentrate our description here in
this robot, while the shooter interface is described in
the next section.
Typical training maneuvers in a real scenario were
measured with a 3-axis accelerometer placed in the
shooter position. Measured accelerations were sepa-
rated into two groups, depending on their frequency,
and we classify them as low frequency accelerations
and high frequency accelerations.
Low frequencyaccelerations are below 0.8 Hz and
can be simulated by tilting our boat replica. In this
way, low frequency accelerations in the longitudi-
nal axis are simulated by pitch rotations, while lat-
eral accelerations are simulated as roll rotations. Low
frequency vertical accelerations such as the ones we
measured would require a larger robot and space than
the one we have available and in this case they were
not cost effective, so we decided to leave them out of
the scope of our robot’s range of movements.
High frequency accelerations were defined as
those between 0.8 and 3 Hz. These accelerations
are simulated directly as linear movements over each
axis. The measurement of yaw rotation was not con-
sidered as the boat didn’t present representative dy-
namics on this type of movements.
Figure 2: Typical Simulator Movements.
An analysis of the processed measurements led
to a low requirement of longitudinal and lateral lin-
ear movements, as they presented high frequency,low
amplitude displacements. With this result, it was de-
termined that a 3DOF robot with roll, pitch and a ver-
tical displacement could produce the required simu-
lator dynamics for training. Figure 2 shows typical
movements of our simulator in terms of angle vari-
ations during time. These movements are produced
from filtering and processing the real boat signal.
Our 3DOF parallel robot is a variation of the robot
presented in (Fattah and Kasaei, 2000), in which we
add a central weight compensator. In terms of the
standard robot nomenclature that describes the type
of joints that fully constraint a robot’s dynamics (Gao
et al., 2002), we designed a 3 UPS + PU robot. The 3
UPS stands for 3 limbs, each consisting of a sequence
of three joints: Universal (U) on the bottom, followed
by a prismatic active joint (P), and a spherical joint
at the top end (S). The PU stands for the central pas-
sive weight compensator. It has a prismatic joint to
the ground (P) fixed to a universal joint at the top (U).
A linear pneumatic actuator keeps a constant verti-
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
90

cal force at the central prismatic joint, by means of a
pneumatic circuit.
The geometry of this robot was optimized accord-
ing to the simulation requirements, in order to mini-
mize the actuator’s nominal force requirements, while
maintaining an adequate workspace and motion ca-
pabilities of the simulator. The optimization process
and results are presented in (Blanco and Rodr´ıguez,
2010a), (Blanco and Rodr´ıguez, 2012), and (Blanco
and Rodr´ıguez, 2010b).
3.2 Shooter Interface
The shooter interface consists of the physical ele-
ments that surround a shooter, the hardware and soft-
ware that monitor the gun’s orientation and trigger
readings, and the middleware that gives this informa-
tion to the simulation process.
As we showed in Figure 1, on top of our 3DOF
robot we mount a replica of a boat’s bow, with a
replica of a large, moving weapon. The weapon’s tip
is replaced by a 52 inches screen that gives a trainee
a first person perspective of the most relevant part of
the virtual scenario in front of him. The weapon has
yaw and pitch rotations, although the screen does not
follow pitch rotations, since shooters are mostly in-
terested in the river bank in front and therefore pitch
rotations are not highly required. Figure 3 illustrates
how the weapon is connected to the simulation soft-
ware. The weapon’s instrumentation gives us the an-
gle in which we have to show the virtual scenario,
so the visualization is synchronized to user’s move-
ments. The weapon’s movement ranges are approx-
imately 180 degrees on the horizontal plane (yaw)
and 90 degrees on the vertical one (pitch), which cor-
respond to the ones that the actual weapon has. In
order to assure a fast and accurately way to capture
the weapon’s movements, two heavy duty incremental
encoders (Stegamnn, 2012) were used. Each one has
1000 pulses per revolution and an output frequency
of 100 KHz. Additionally, the weapon has three pulse
buttons; one is used to capture the fire event, and the
other two capture the sequence of tasks when ammu-
nition is loaded. Since encoders are incremental and
therefore weapon’s orientation should be computed in
terms of a previous one, we defined a callibration pro-
cess that a user should perform in order to define the
initial position and orientation. Both encoders and
pulse buttons are connected to a Wiring card (Barra-
gan, 2013). Such a card contains a program writen
in the Processing Programming Language (Fry and
Reas, 2013) that receives signals from attached sen-
sors —encoders and pulse buttons in our case— and
produces an optimized output stream, which is trans-
mitted to our simulator in our server.
On the server side we use VRPN (Taylor et al.,
2001) to handle the weapon’s data stream. We de-
signed a VRPN custom device and protocol in or-
der to minimize the data stream coming from Wiring,
which is then translated to the standard VRPN data
stream types, in this case quaternions. We first used
a basic, text-based protocol between Wiring and our
server which had delays of up to 400ms. Such delays
generated uncomfortable jitter on our visualization if
our weapon was abruptly moved. We avoided such a
big delay by writing a binary based protocol with a
smaller buffer size. In this way we could create pack-
ets of 8 bytes instead of 128, and reduce our overall
delay for this channel up to 30ms. We also take ad-
vantage of VRPN’s support for multiple clients, in or-
der to provide a simple debugging channel from third
party applications. Finally, a VRPN remote client is
built inside our simulator software through a dynamic
library, in order to read the required information and
facilitate updates.
Figure 3: Weapon Connection to our Simulator.
Modifications in orientation and events from firing
and reloading the weapon are recorded with a times-
tamp in a relational database. This informationis used
by the report system in order to summarize a user’s
session.
3.3 Simulation Software
Our simulation software loads the simulation sce-
nario, defines the physical platform’s movements,
reads data from the shooter interface, computes the
state changes in the simulation given by user’s input
or environmental changes, and produces visual and
auditory feedback. We use The Unity Game Engine
(Unity, 2013) as the software platform for our simula-
tor, given its ease of development, rich functionality,
and current widespread use.
A general overview of this component is showed
in Figure 4 and it has a similar structure to the one
proposed by (Smith, 1998).
AShootingSimulatorfromBoats
91

Figure 4: General Components in our Simulator.
3.3.1 Simulation Scenario
We define several simulation scenarios that allow
trainees to test their skills under several conditions.
Figure 5 shows some terrains we have developed,
which offer different conditions about the location
of friends and foes. Figure 6 presents several atmo-
spheric conditions (i.e dry or rainy weather) and day-
light intensity (i.e. sunny, sunset, cloudy, or night).
Figure 5: Terrain Shapes.
Figure 6: Different Environment Types.
Another important condition in our scenarios is
the difficulty of the training session. We define three
levels of difficulty:
• Training: It contains few static enemies that do
not fire back, and it is used to introduce a trainee
to a new terrain.
• Practice: It contains static enemies that fire back,
and it is used to introduce a trainee to a combat
situation.
• Combat: It contains moving enemies spread all
over a terrain, and it is used to simulate a full com-
bat scenario.
The scenario information, i.e. terrain maps, boat
trajectories, and enemy locations, is created with the
Unity built-in editor. Boat trajectories are computed
by an external program that precomputes the specific
boat dynamics and outputs a text file, which is used
as input by the simulator and by the motion platform.
3.3.2 Motion Platform Software
Movements in our motion platform are predefined,
since our simulator concentrates on the shooter be-
havior. A non realtime Matlab program creates a text
file that contains trajectory data for both the motion
platform and the visualization. An embedded VRPN
client receives a stream with the trajectory data and
moves the motion platform accordingly.
3.3.3 Shooting Interface Software
The shooting interface software is a VRPN server on
its own computer that receivesweapon’sbutton events
(i.e. loading and shooting) and movements (i.e. yaw
and pitch) and sends such information to any inter-
ested client.
3.3.4 Simulation Process and Feedback
There are several tasks that are performed by the sim-
ulator at each step. First, it reads the next position
from the boat’s predefined trajectory and sends it to
the motion platform. Then, it reads the weapon’s
events and updates its virtual state. If the weapon’s
trigger has been fired, it starts a bullet’s simulation.
At every step we compute ray - object collisions and
find out possible targets to update.
Although there is visual feedback related to bul-
lets, specially during night, the most significant feed-
back we generate in any scenario besides visualiza-
tion changes is sound. Wind and boat motors are part
of the constant background in this system, and it is
modelled as stereo feedback. Weapon’s firing sounds
are located in the 3D space, and they are played
both when enemies shoot and when a trainee fires his
weapon. This last sound is the loudest in the system,
which almost silences all other sounds. Visual feed-
back for bullets simulates tracer bullets, special bul-
lets that are used by a shooter to correct his aim. They
are simulated as smaller bullets that are more visible
and do not produce collisions.
Our simulator keeps track of dynamic objects in a
scene and records the creation and impact conditions
of every bullet. It also keeps track of the weapon’s
events. This information is gathered for an off-line
process that creates reports.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
92
3.4 Reporting System
We develop a reporting system that collects the user
actions and events generated by the simulation and
subsequently compiles them into a report that shows
the shooter’s performance.
All data collected about the events of the weapon,
timing and bullets whereabouts are dumped into a re-
lational database at the end of each session. In this
way, we register the following events:
• Readings from the weapon (changesin orientation
and pressing or releasing buttons)
• Impact of a bullet over a relevant object
• The event of running out of ammo
• The start and end time of a simulation
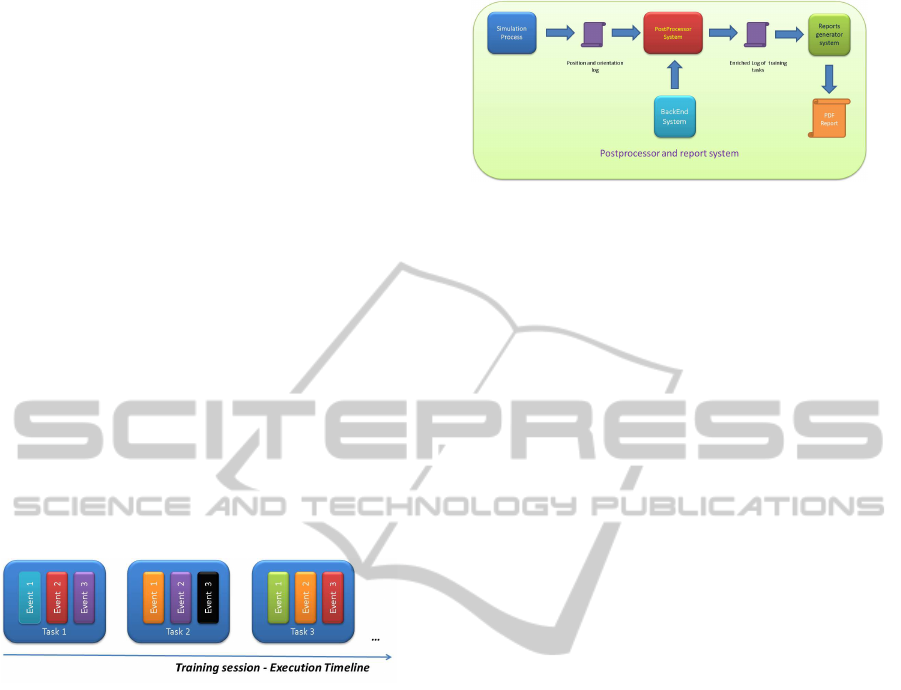
Since the above events are too granular to de-
termine the shooter’s performance, we define tasks.
Each task is a set of events that the user has to accom-
plish at some point along the execution time-line of
the the training session. These are non-overlapping
groups of events, as show in Figure 7.
Figure 7: Data Hierarchy Between Tasks and Events.
Examples of tasks can be:
• Load the weapon
• Aim and shoot a target
• Counterattack an ambush
• Deter enemies by shooting over a specific area
A task is defined by a collection of events that the
shooter has to accomplish, a collection of events that
could interfere with the normal termination, and the
metric or metrics used to measure it. A back end sys-
tem holds all these data and provides services to gen-
erate reports.
For instance, to accomplish the task of aim and
shoot a target, the shooter has to change the flank of
attack and shoot the enemies in a correct timing. If
ammo runs out before hitting a target, a trainee must
perform a weapon reload and resume shooting. If the
training session ends without reloading, this task has
failed. Two metrics are used to evaluate performance
of this task: elapsed time and number of bullets used.
Both of them are measured from the moment the en-
emy appears to the moment it gets the first hit.
Figure 8: Postprocessing and Reporting System.
Figure 8 shows the process of generating perfor-
mance reports.
The reporting system can generate a PDF file with
performance information about a session. Some of
the metrics we report are the following: number of
bullets fired to valid targets, bullets impacted areas
nearby a target, and rate of firing.
4 PRELIMINARY RESULTS
We conducted a test session with expert users in order
to evaluate the current implementation of our simu-
lator. Four experts in combat operations with ages
between 28 and 34 and experience from 3 to 7 years
in several rivers of our Country were invited to our
lab. None of them had previous experience with this
type of simulators. They received a short introduction
about our simulator, its capabilities and limitations,
and some instructions for safe use. Each subject had
to go on top of the motion platform, hold the weapon
at all times, identify the location of enemies that were
shooting at the boat and fire at will. They had to pay
attention to the stimuli from the motion platform, vi-
sual and auditory cues in order to identify enemies,
and they were asked to move in order to cover their
flanks.
Sessions last 7 minutes, the time for our prere-
corded movements. We used the normal river terrain
with rainy conditions and we defined a rough situa-
tion for river movements. At the end of a session
subjects filled a questionnaire with questions related
to the simulator and to the relationship between this
experience and a real situation.
Figure 9 shows the average answers to the ques-
tions related to the simulator, in a scale of 1 (worst) to
five (best), as follows (Letters in questions correspond
to the original order in the questionnaire):
1. A. Do you consider that this simulator can im-
prove the skills of an shooter?
2. B. How easy is to shoot in this simulator?
3. D. How easy is to reload ammo in this simulator?
AShootingSimulatorfromBoats
93
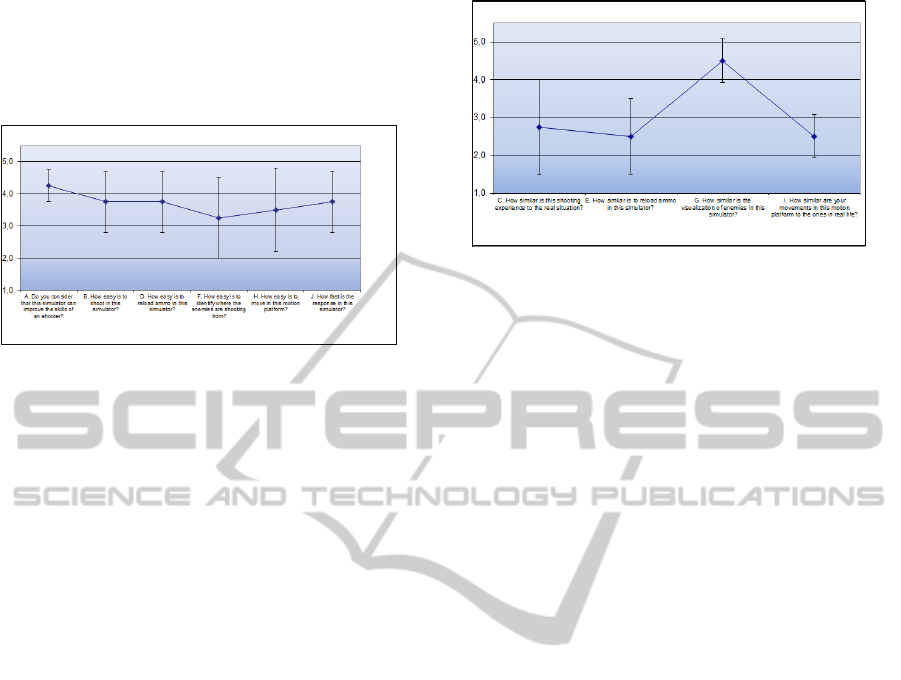
4. F. How easy is to identify where the enemies are
shooting from?
5. H. How easy is to move in this motion platform?
6. J. How fast is the response in this simulator?
Figure 9: Questions Related to the Simulator.
In general, subjects see value on the use of a simu-
lator like this for training (A). They found the weapon
easy to use. Although simulator’s response received
a fair mark, it seems it can be improved in future ver-
sions. In the same way, enemy identification can be
improved, as well as movements in the motion plat-
form. In this regard, it is possible to think that enemy
identification is also difficult in the real scenario, and
in some way we correlate to that fact. They also men-
tioned an exagerated movement as a problem in the
motion platform, and the lack of correlation between
boat movements and enemy fire, which is part of a
real situation.
We asked subjects to answer the following ques-
tions related to the similarities between our simulator
and a real situation:
1. C. How similar is this shooting experience to the
real situation?
2. E. How similar is to reload ammo in this simula-
tor?
3. G. How similar is the visualization of enemies in
this simulator?
4. I. How similar are your movements in this motion
platform to the ones in real life?
Figure 10 shows answers for these questions. We
can see we have to improve our similarity to the real
weapon. In this sense, our mockup is not an exact
copy of the real gun, therefore experts noticed that
fact. We also have to improve on the motion platform
movements. In this regard, since our movements are
precomputed and for this test somewhat exagerated,
experts felt they didn’t correlate to the situation at
hand. However, experts believe the visualization was
good enough for this situation, which encourages us
in our selection.
Figure 10: Questions Related to the Correlation Between Our Simulator and a Real Situation.
Figure 10: Questions Related to the Correlation Between
Our Simulator and a Real Situation.
5 CONCLUSIONS AND FUTURE
WORK
We present a simulator for shooting from fluvial
boats, which consists of a 3DOF motion platform, a
close to reality weapon mockup, a large screen for
visualization, and speakers for sound effects. Move-
ments for the motion platform are derived from the
analysis of measurements in a real boat. We include a
reporting system that shows a shooter’s performance
in terms of number of bullets fired to valid targets,
bullets impacted areas nearby a target, and rate of fir-
ing. Unity, VRPN, and a Wiring embedded system
were used as the basic infrastructure for our simula-
tor. Our simulator has been tested by users with a con-
siderable experience in fluvial combat. Their general
perception is that our system is suitable for enhancing
the shooting training program of shooters.
In the future we plan to improve on some features
pointed out by experts. We also plan to include more
people in the simulation, specially a boat driver.
ACKNOWLEDGEMENTS
The authors would like to thank to the Division of Re-
search and Investigation of the Colombian Navy for
their financial support, providing the personnel assis-
tance and advice to carry out the design, construct
and tests of the simulator. Also, we appreciate the
assistance of the professors of the the departments of
Mechanical Engineering and Systems and Computer
Engineering, and administrative personnel of Colivri
laboratory at Los Andes University in Bogot´a Colom-
bia.
GRAPP2014-InternationalConferenceonComputerGraphicsTheoryandApplications
94

REFERENCES
Avizzano, C., Tripicchio, P., Joale, L., and Bergamasco, M.
(2010). Design of a motion based sailing simulator. In
RO-MAN, 2010 IEEE, pages 1–7.
Barragan, H. (2013). Wiring open project,
http://wiring.org.co.
Blanco, J. and Rodr´ıguez, C. (2010a). Configuration Op-
timization of a Boat Simulation Platform for a Mo-
bile User. In Proceedings of the ASME 2010 Interna-
tional Mechanical Engineering Congress and Exposi-
tion, IMECE 2010.Vancouver.
Blanco, J. and Rodr´ıguez, C. (2010b). Optimized devel-
opment of a simulation platform for fluvial combat.
Master’s thesis, Mechanical Engineering, Uniandes,
Bogot´a, Colombia.
Blanco, J. and Rodr´ıguez, C. (2012). Optimal Design of a
River Boat Simulator. DETC2012-70456. In Proceed-
ings of the ASME 2012 International Design Engi-
neering Technical Conferences (IDETC) and Comput-
ers and Information in Engineering Conference (CIE),
IDETC/CIE 2012. Chicago, IL.
Bruzzone, A., Longo, F., Nicoletti, L., and Diaz, R. (2012).
Traffic controllers and ships pilots training in marine
ports environments. In Proceedings of the 2012 Sym-
posium on Emerging Applications of M&S in Industry
and Academia Symposium, EAIA ’12, pages 16:1–
16:8, San Diego, CA, USA. Society for Computer
Simulation International.
Christensen, K. (2000). The long range shooting simula-
tion., http://www.shooterready.com.
Dahlberg, E. (2012). Eurosimulator,
http://www.hlberg.dk/eurosimulator/shooting
uk.html.
Fattah, A. and Kasaei, G. (2000). Kinematics and dynam-
ics of a parallel manipulator with a new architecture.
Robotica, 18(5):535–543.
Fry, B. and Reas, C. (2013). Processing,
http://processing.org.
Gao, F., Li, W., Zhao, X., Jin, Z., and Zhao, H. (2002). New
kinematic structures for 2-, 3-, 4-, and 5-dof parallel
manipulator designs. Mechanism and Machine The-
ory, 37(11):1395 – 1411.
Lvovskiy, M. (2005). Training simulator for sharp shooting.
Patent No. 6942486 USA.
McKenna, I. H. and Little, S. (2000). Military concept de-
velopment: developing tactics using low cost, acces-
sible simulations. In Proceedings of the 32nd con-
ference on Winter simulation, WSC ’00, pages 991–
1000, San Diego, CA, USA. Society for Computer
Simulation International.
Mertens, S. (1993). The corps battle simulation for military
training. In Proceedings of the 25th conference on
Winter simulation, WSC ’93, pages 1053–1056, New
York, NY, USA. ACM.
Page, E. and Smith, R. (1998). Introduction to military
training simulation: a guide for discrete event simula-
tionists. In Simulation Conference Proceedings, 1998.
Winter, volume 1, pages 53–60 vol.1.
Perez, T., Smogeli, Ø. N., Fossen, T. I., and Sørensen, A. J.
(2006). An Overview of the Marine Systems Sim-
ulator (MSS): A Simulink Toolbox for Marine Con-
trol Systems. Modeling, Identification and Control,
27(4):259–275.
Seet, G., Lau, M., Low, E., and Cheng, P. (2001). A uni-
fied pilot training and control system for underwa-
ter robotic vehicles (urv). Journal of Intelligent and
Robotic Systems, 32(3):279–290.
Smith, R. (1998). Essential techniques for military model-
ing and simulation. In Simulation Conference Pro-
ceedings, 1998. Winter, volume 1, pages 805–812
vol.1.
Stegamnn, I. (2012). Heavy duty incremental encoder,
http://www.stegmann.com/product/incremental.
Stephen P. Rosa, Motti Shechter, J. C. (2003). Firearm
laser training system and method employing an actu-
able target assembly. Patent No. 6575753 USA.
Supply, C. S. (2013). Champion shooters supply, llc,
http://championshooters.com/noptel/index.htm.
Systems, A. I. (2013). Indoor live-fire
multi-screen simulator, http://www.ais-
solutions.co.uk/portfolio/cleveland-durham.php.
Takeda, H., Yamasaki, M., Moriya, T., Minakawa, T.,
Beniyama, F., and Koike, T. (1999). A video-based
virtual reality system. In Proceedings of the ACM
symposium on Virtual reality software and technology,
VRST ’99, pages 19–25, New York, NY, USA. ACM.
Taylor, II, R. M., Hudson, T. C., Seeger, A., Weber, H., Ju-
liano, J., and Helser, A. T. (2001). Vrpn: a device-
independent, network-transparent vr peripheral sys-
tem. In Proceedings of the ACM symposium on Virtual
reality software and technology, VRST ’01, pages 55–
61, New York, NY, USA. ACM.
TROJAN, A. (2012). Shotpro 2000.,
http://www.trojansim.com.
Unity (2013). Unity technologies, http://unity3d.com.
Wang, Z., Hu, Y.-M., and Xie, F. (1996). Optical fiber sim-
ulator for shooting and aiming practices. In Bennett,
K. D., Kim, B. Y., and Liao, Y., editors, Fiber Optic
Sensors V, volume 2895 of Society of Photo-Optical
Instrumentation Engineers (SPIE) Conference Series,
pages 475–478.
Yang, Y.-F. (2008). Evaluation of steering simulating for
china coast guard ship in narrow waterway. In ITS
Telecommunications, 2008. ITST 2008. 8th Interna-
tional Conference on, pages 95–98.
Young, D.(2013). Canadian academy of practical shooting.,
http://www.caps-inc.com/c-4-company.aspx.
AShootingSimulatorfromBoats
95
