
A Mobile Multi Agent System for Routing in Adhoc Network
M. A. Riahla
1
, K. Tamine
2
, A. Mifdal
2
and M. Mezghiche
1
1
LIMOSE Laboratory, M'hamed Bougara University, South Campus 35000 Boumerdes, Boumerdes, Algeria
2
XLIM Laboratory, Limoges University, Limoges, France
Keywords: Dynamic Network, Mobile Agent, SMA, MANET, Routing Protocol, Distributed Algorithm.
Abstract: Dynamic networks are a challenge for the deployment of distributed applications on autonomous machines.
But, these networks can meet problems with implementation of services such as routing and security in
general. In this sense, the multi-agent systems are well suited for the design of distributed systems where
several autonomous agents interact or work together to perform some set of tasks or satisfy some set of
goals and moving the problem of analyzing from a global level to a local level and then reduce the
complexity of the design (Ferber, 1997) In this paper we present a generic model Multi Agent system that
we adapt to develop a new routing protocol for ad hoc networks. Wireless ad hoc networks are
infrastructureless networks that comprise wireless mobile nodes able to communicate each other outside
wireless transmission range. Due to frequent network topology changes in one hand and the limited
underlying bandwidth in the other hand, routing becomes a challenging task. In this paper we present a
novel routing algorithm devoted for mobile ad hoc networks. It entails both reactive and proactive
components. More precisely, the algorithm is based on ant general behavior, but differs from the classic ant
methods inspired from Ant-Colony-Optimization algorithm (Dorigo, Birattari and Stutzle, 2006). We do not
use, during the reactive phase, a broadcasting technique that exponentially increases the routing overhead,
but we introduce a new reactive route discovery technique that considerably reduces the communication
overhead.
1 INTRODUCTION
Dynamic networks are a challenge for the
deployment of distributed applications on
autonomous machines. But, these networks can meet
problems with implementation of services such as
routing and security in general.
We have taken as a case study in ad hoc
networks. For this we focused on Multi Agent who
has a particular interest in the distributed problems
in general and for which it is difficult to prevent all
situations. Why the multi-agent systems are well
suited for the design of distributed systems where
several autonomous agents interact or work together
to perform some set of tasks or satisfy some set of
goals and moving the problem of analyzing from a
global level to a local level and then reduce the
complexity of the design. In this paper we present a
generic model MultigAgent system that we adapt to
develop a new routing protocol for ad hoc networks.
In multi-hop wireless ad hoc networks
(MANETs) (Royer and Toh, 1999), mobile nodes
cooperate with each other to form a network without
a fixed infrastructure such as access point or base
stations in which nodes perform routing discovery
and routing maintenance in a self-organized way.
The routing is particularly a challenging task in
MANETs. Indeed, because of the frequent changes
in the network topology triggered by nodes
displacements, establishment of new nodes
connections and nodes disconnections, the routes
discovery process is unstable. Practically speaking,
efficient routes may quickly become inefficient or
even unusable ones. To tackle this problem by
ensuring a suitable routing through reliable
algorithms, one important way is to update routing
information more regularly than in wired networks.
However, this requires more routing control
packets, which is specifically an issue in MANETs,
since the bandwidth of the wireless medium is very
limited and the medium is shared.
Beyond the routing overhead problem, our
proposed protocol also attempts to solve the
problems of packet delivery ratio and end-to-end
delay. For this purpose, we propose a hybrid method
31
Riahla M., Tamine K., Mifdal A. and Mezghiche M..
A Mobile Multi Agent System for Routing in Adhoc Network.
DOI: 10.5220/0004697500310039
In Proceedings of the 4th International Conference on Pervasive and Embedded Computing and Communication Systems (PECCS-2014), pages 31-39
ISBN: 978-989-758-000-0
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

that entails both proactive and reactive processes.
The routes are established and periodically
maintained with a constant number of mobile agents.
The Agent is periodically created by each node and
thus the number of agents in the network can
continually be controlled. However, when a
connection is planned to be established by a node
with another one within the lack of a route in its
routing table, the considered node makes a route
request by setting a local variable available for
Agents passing through it.
Our model is based on the ant behavior. A
number of ant-based routing algorithms exist either
in wired (Di Caro and Dorigo,1998) or in wireless
(Caro, Ducatelle and Gambardella, 2005) (Correia,
Vaza ̃ and Lobo, 2009) (Correia and Vaza ̃, 2008)
(Laxmi, Jain and Gaur, 2006) (Bouazizi, 2002)
networks. They are based on the pheromone trail
laying-following behavior of real ants and the
related framework of ant colony optimization (ACO
(Dorigo and al, 2006). In all of these approaches, a
source node broadcasts an Agent whenever it plans
to build a route to a fixed destination. One of Agent
roles is to deposit amounts of pheromone in order to
mark optimal paths between a couple of nodes
namely source and destination nodes. Unlike these
methods, we do not exploit a broadcasting technique
that exponentially increases the routing overhead,
but we introduce a new idea through an ant-based
algorithm that consists in setting a local route
request whenever a node plans to send a data packet.
It is the role of Agent, moving within the network
during the proactive phase, to disseminate this
information and to provide routes towards the
requested destination. It should be noticed that our
protocol doesn’t deterministically establish the best
route, since the Agent are not broadcast. However,
the agents attempt to get as close as possible to the
best route.
We begin by presenting some definitions on self-
organized Multi Agent Systems and their analogy
with dynamic networks. We present in the second
part the principle of ad hoc networks and the
problem of routing with this type of network data. In
the Third part we present the architecture and mode
of operation of a Multi Agent system adapted to
generic case of dynamic systems. We detail the
instantiations of the generic model: a routing
protocol for ad networks. Before concluding, we
discuss in Part VI results and tests of the new
routing protocol using NS2 simulator.
2 MULTI-AGENT SYSTEMS AND
DYNAMIC NETWORKS:
ANALOGIES AND ISSUES
In recent years, a new topic of research has emerged:
dynamic networks (also called autonomous
systems). A dynamic and distributed network
consists of a set of auto-configurable nodes that are
constantly changing (the number of nodes and links
change over time). The topology change is also one
of the properties of these networks, because the
network nodes can join and/or leave the network
spontaneously. The main advantage of this type of
network is the fast and inexpensive deployment and
installation.
A multi agent system (MAS) is a set of agents
operating in a common environment. This set of
agents, not necessarily smart, is a complex system
which appears a collective intelligence. This
collective intelligence comes from the emergence of
a global behavior of all agents. An example of this
collective action is with the behavior of a colony of
ants that act like an entities (ants) with no cognitive
capacity but have achieved a high degree of
organization and adaptation quote. An agent is a
software entity (program) reactive, proactive and
with social skills, able to act autonomously in its
environment. Responsiveness refers to maintaining a
constant link with the environment when a change
occurs. The proactivity means that the system allows
agents to generate and satisfy its goals. Social skills
indicate that the system allows the agent to interact
or cooperate with its environment and / or with other
agents.
It is thus clear that there is an analogy between
dynamic networks and multi-agent systems. Indeed,
each node of a dynamic network is autonomous
because it is not controllable by any other node on
the network, is reactive because it can act as a server
for other nodes, and can also be proactive in the case
of his client node status, and finally it is social
because it communicates and cooperates with other
nodes in the network.
In this context, an inherent issue in the
management of dynamic networks is: definition of a
data routing protocol in the case of ad hoc networks.
3 ROUTING ISSUES IN AD HOC
NETWORK
In multi-hop “wireless” ad hoc networks (MANETs)
(Royer and Toh, 1999), “mobile nodes” cooperate
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
32

with each other to form a network “without a fixed
infrastructure” such as access point or base stations
in which nodes perform routing discovery and
routing maintenance in a self-organized way. Due to
frequent network topology changes in one hand and
the limited underlying bandwidth in the other hand,
routing becomes a challenging task.
Several types of routing protocols have been
specifically designed for ad hoc networks and have
been classified into two main categories: reactive
and proactive protocols. In reactive routing protocols
such as AODV (Perkins and Royer, 1997) (Ad Hoc
On demand Distance Vector) and DSR (Johnson
Maltz and Broch, 2001) (Dynamic Source Routing),
the routes are only discovered when required in
order to save node and network resources, while in
proactive routing protocols such as OLSR (Clausen
and Jacquet, 2003) (Optimized Link State Routing
Protocol) and DSDV (Perkins and Bhagwat, 1993)
(Destination Sequenced Distance Vector) the routes
are established in advance, avoiding consequently
the delays that occur during the discovery of new
routes. The problem raised by proactive protocols
consists in the routing overhead, especially when
there are frequent topology changes. This is highly
inefficient when updating routes that rarely carry
traffic. A reactive protocol is, in contrast, much
more appropriate for such situations, since it
generates lower overhead in terms of used
bandwidth.
There is another kind of protocol that combines
both reactive and proactive approaches called hybrid
routing protocols. In this paper, we focus on a
particular class of hybrid routing protocols based on
an optimization technique known as ant colony
optimization (ACO) (Caro, Ducatelle and
Gambardella, 2005) (Correia, Vaza ̃ and Lobo,
2009) (Correia and Vaza ̃, 2008) (Laxmi, Jain and
Gaur, 2006) (Bouazizi, 2002) which are inspired
from the foraging general behaviour of some ant
species. The ant underlying behavior can be
summarized as follows: ants deposit pheromone on
the ground in order to mark some favorable paths
that should be followed by other members of the
colony, for instance, ants walking to and from a food
source deposit on the ground a substance called
pheromone. Other ants perceive the presence of
pheromone and tend to follow paths where
pheromone concentration is higher. Through this
mechanism, ants are able to transport food to their
nest in a significant effective way.
Several properties belonging to ant-based routing
algorithms are strongly appropriate to address the
problems inherent in MANETs: they are highly
adaptive to network changes, robust to agent
failures, and provide multipath routing. However,
since they mainly rely on repeated path sampling, a
significant overhead can be induced within native
routing algorithms. Several ant-based routing
algorithms for MANET have been proposed in state
of the art previous work. However, within the
attempt to limit the overhead caused by the ants,
these algorithms considerably loose the inherent
proactive sampling and exploratory properties
belonging to the ants behavior adopted in the
original ant-based algorithms.
4 A MULTI AGENT SYSTEM FOR
GENERIC AND DYNAMIC
NETWORKS
4.1 Architecture and Operating Mode
for Multi Agent System
The Generic Multi Agent System that we propose to
manage services in dynamic networks is composed
of two types of agent communities (see figure 1).
Both agent communities interact through different
types of communication which we will present later.
The first community of agents is SMA_Node
will manage the functions of mobile nodes in the
dynamic network. Each agent will be called node,
then represent a network node whose features will
be explained below. Each node agent will be able to
provide a set of network data packets are called
packet. This set of data packets will be the second
community of agents that will call SMA_Packet.
Packet agents will travel along the dynamic network
in a completely random way according to some
metric contained in the node agents and packet
agents at the interaction between these two types of
agents.
Figure 1: General scheme of our model.
AMobileMultiAgentSystemforRoutinginAdhocNetwork
33

Moving a packet agent to a node agent network
is defined by a behaviour of packet agent which we
will define later.
Each node agent SMA_Node from community
will be defined generically by the following
behaviours:
Detect_neighbors () return Liste_node
This function allows the node agent to be able to see
all the node agents that are its "scope" and with
which it can communicate directly.
Connect (v: node)
This function allows the node agent to start a
connection with its neighbor node V in order to
establish a communication with him.
Disconnect (v: node)
This function allows the node agent to delete a
connection with a neighbor node. This function also
has the effect of removing the node agent v from its
list of neighbor nodes.
Connect ()
This function allows a node agent to join a network
of node agents.
Disconnect ()
This function disconnects the agent from network.
Generate () return packet
This function allows the agent to create and
distribute in the network a new packet agent.
Read_info (p: packet, info: information)
This feature allows the agent to read and get
information broadcast over the network and carried
by the packet agent p as it moves from node to node.
Write_info (p: packet, info: information)
This feature allows the agent to write information
into the packet agent p so that it will be distributed
in the network.
Move (p: packet, n: node)
This function allows the node agent to send the
packet agent p to another node neighbor agent (node
agent n). It is this feature that allows the distribution
of packet agents in the network.
Each agent from community SMA_packet will
be defined generically by the following behavior:
Create ()
This feature allows the packet agent to be created by
the creator node agent;
Delete ()
This feature allows the packet agent to be destroyed
by its creator node agent;
Transfert (n: node, info: information)
This feature enables the packet agent to transfer the
information carried to the current node where it is
located. This feature will be used by the current
node agent to perform a read of the information in
the network;
Update_packet (n: node, info: information)
This function allows the packet agent to update its
data with information provided by the current node
agent. This feature will be used by the current node
agent in order to broadcast information in the
network;
Choice_ displacement (n: node) return node
This feature lets you know randomly and according
to some metric contained in the node agent n and in
the current packet agent, the next node where the
current packet agent will move;
Move (init: node, final: node)
This function allows the packet agent to move from
the node agent init to node agent final. The move
action will be achieved through the move () function
of init node agent.
4.2 Application of the Model in the
Case of Routing in Ad Hoc
Networks: PROTOCOL
AgentRouting
The main idea of the protocol AgentRouting is to
build a multi-agent based system where each node
provides several kinds of agents. Regarding the
purposes of the routing task, we design two main
types of agents. A first mobile agent, called Ant-
Agent, is responsible of establishing routes. A
second mobile agent, called Rectifier-Ant, is issued
by a node whenever a change in the network
topology is detected. Our protocol is a complete
multi-agent based system, where an agent works
independently from the others. This fits very well
spontaneous networks such as wireless ad hoc
networks, because of the very high mobility and
self-organization properties of this type of networks.
Our protocol inherits from the advantages of this
kind of model: autonomous work, distributed
intelligence and robustness. Furthermore, the use of
mobile agents allows to easily extending the
functionalities of a protocol by simply adding other
agents or by assigning other functionalities to
existing ones.
AgentRouting protocol is based on a hybrid
algorithm. In the proactive phase, the protocol uses
mobile Agent as follows: each node (Origin-Node)
periodically creates one Ant-Agent that moves
across the network from one node to another and
builds paths from the current node to its Origin-
Node and paths from the current node to the last
visited one when the Ant-Agent returns back to its
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
34

Origin-Node (the Ant-Agent has two phases: a Go-
phase when it is sent by its Origin-Node and a Back-
Phase when it returns to its Origin-Node).
When a data session is started between a source
node s and a destination node d, s checks whether it
has up-to-date routing information about d. If not,
the node s makes a local route request. In our case,
the route request is not broadcast to every node as it
is the case in a classic ant routing protocol (Di Caro
and Dorigo,1998) (Laxmi, Jain and Gaur, 2006)
(Bouazizi, 2002) , but it is stored on the node s. The
broadcast task is assigned to the Agent (created
during the proactive phase and moving within the
network) that have the responsibility to
''intelligently'' disseminate the route request
throughout the network. These Agent gather
information about the quality of paths they followed,
and at their arrival in node s (which contains the
route request to destination d), they return back to
their source node by tracing back the path and by
updating routing tables.
Before detailing our routing protocol, let's
consider some of these assumptions. Each node must
be able to broadcast hello messages to its one hop
neighbors. We also consider that the links between
the nodes of the networks are always bi-directional.
Moreover, as the protocol must operate in an ad hoc
environment where nodes are highly mobile, the
routing protocol must take into account this
constraint and be responsive to these frequent
changes of the topology. Therefore, our routing
protocol will consist of three modules: neighborhood
discovery module, path discovery module and
managing broken links module. In this paper, we
focus our contribution on the two latter modules.
4.2.1 Proactive Phase
AgentRouting Protocol is a routing protocol for
wireless ad hoc networks based on mobile Agent. To
establish routes between nodes, our protocol uses
mobile agents which are periodically created by each
network node. An Ant-Agent belongs to a single
node called Origin-Node. An Ant-Agent moves
across the network from one node to another. When
it reaches a node, the Agent establishes and builds,
in its memory and in the routing table of the node, a
path between this node and its origin node.
Thereafter, the Agent chooses a next hop among its
neighbors in a stochastic manner and proportionally
to the amount of pheromone deposited by the other
Agent during their Back-Phase.
To avoid routing loops, we assign a unique
identifier <node_ID, Ant_ID> to agents, that is
incremented at each creation of a new Ant-Agent. If
a node receives several times the same Ant-Agent, it
accepts the information given by the first one and
ignores the others.
In order to monitor its Ant-Agent, a node assigns
a configurable Time To Live (TTL) to agents whose
value is proportional to the network dimension and
is decremented at each hop. This means that an Ant-
Agent will have two phases during its life cycle: Go-
Phase where the agent builds a path from the current
node to its Origin-Node and a Back-Phase where the
agent follows a reverse path from the one followed
during its first phase (the Ant-Agent saves in its
memory a reverse path during its Go-Phase). At
each node visited during the Back-Phase, the Ant-
Agent builds and stores in the routing table of this
node a path from this current node to the last node
visited during the first phase (when TTL=0). This is
the first step in the routing discovery process which
is proactive.
4.2.2 Reactive Phase
During the proactive phase, a large number of paths
are built. However, when a node s plans to send or
forward data packets to an unknown destination
node d, it triggers a route request process where the
route request is locally saved. When an Ant-Agent,
during its Go-Phase, visits a node which has made a
route request (a node can have several route
requests), the Ant-Agent switches to its Back-phase
and deposits an amount of pheromone on each node
of the reverse path towards its origin node. This
mechanism is used to mark the paths towards the
node s and thus inform the other nodes (and Agent)
about this route request. The amount of pheromone
deposited by the Ant-Agent is defined by the
following equation (1):
Q
i
t
= Q
i
(t
-1
)
+ q (1)
Where Q
it
is the pheromone level in the node n
i
at
time t and q is a positive constant (we choose q=0.1
for our simulations).
During its Go-Phase, a node chooses the next
hop in a stochastic manner and proportionally to the
amount of pheromones; this process increases the
likelihood to select a path towards a claimant node
without penalizing the other paths. Choosing the
next node randomly and proportionally to the
amount of pheromones allows us to increase the
number of agents towards the claimant node s. On
the one hand, this approach increases the chances of
having an Ant-Agent issued from the destination
node d (i.e., the Agent's source node is the
destination d). On the other hand, it allows to
AMobileMultiAgentSystemforRoutinginAdhocNetwork
35

quickly reaching nodes that have already established
paths towards the destination d.
4.2.3 Stochastic Data Routing
In our protocol, the nodes stochastically forward the
Agent. When a node has several neighbors
concerned by nodes that made a route request, it
randomly selects one of them with the probability p.
Each neighbour can have a quantity of
pheromone related to nodes which made a route
request.
Let's consider N (n) the set of n's neighbors and
Q
it
the amount of pheromone associated to a
neighbor n
i
stored in the routing table of the node n
at time t.
The expression that gives the probability p to
select a next hop n
j
from node n is defined in
equation (2).
P = Q
it
/ ƩQ
k
t
(2)
In order to consider route requests in an equitable
manner leading to a self-organizing system and a
better management of frequent changes in the
network topology, we propose to set up an
evaporation process. This latter allows to no longer
take into account the old route requests already
satisfied. At each time interval, the amount of
pheromone corresponding to each route request is
decreased as defined in equation (3):
Q
i
t
= (1-α) * Q
i
(t
-1
)
(3)
Where Q
it
is the amount of pheromone related to
a claimant node s, stored in the node n
i
at time t and
α is a real (0<α<1) (we choose α= 0.1 for our
simulations).
5 TESTS AND SIMULATIONS
RESULTS
5.1 Ad Hoc Simulations and Results
We evaluate our routing protocol through a serie of
simulation tests. We compare its performance with
AODV (Perkins and Royer, 1997), DSDV (Perkins
and Bhagwat, 1993) and AntHocNet (Caro,
Ducatelle and Gambardella, 2005).
We have evaluated our routing protocol under
the NS2 environment.
In each simulation, which lasts 500s, the
maximum speed in the scenario is fixed to 30m/s,
the sending frequency of Agent is set to 0.5s, the
evaporation frequency is set to 0.5s, the evaporation
rate α is set to 0.1 and the updating value of
pheromone q is set to 0.1. The traffic is randomly
generated (the communications are established by
randomly choosing pairs of nodes). A
communication consists in sending 512 bytes
packets by using UDP protocol. The total number of
data packets ranges from 700 to 1000 packets per
simulation.
The following experiments show a comparison
of our protocol with three other routing baseline
protocols: AODV (a reactive protocol), DSDV (a
proactive protocol) and AntHocNet (an ant based
routing protocol). For this purpose, we choose a
network with an area of 500x500 m
2
. The evaluation
metrics used in the experiments are the following:
The number of lost packets: this metric
measures the number of packets which are not
delivered to their destinations; it gives us, on
the one hand, quantitative information about
the robustness of our protocol and, on the
other hand, information about the network
congestion;
The end-to-end delay: this metric represents
the average delay between the packet sending
time and its reception time;
The total size of control messages generated
by a protocol.
We have computed these metrics by varying,
during the simulation time, the number of nodes, the
number of data packets and the speed of nodes.
5.1.1 The Packet Loss
The packet loss metric allows us to evaluate and to
compare the robustness and the effectiveness of the
four protocols. Figure 2 and 3 show the variation of
% packet loss considering respectively the variation
of the number of nodes and the total number of data
packets. It is clearly shown in these figures that our
scheme, DSDV protocol and AntHocNet protocol
have less packet loss than AODV protocol. The
number of lost packets increases very quickly in
networks of more than 70 nodes and in networks
with high traffic. We can explain these results by the
fact that the AODV protocol uses a broadcast
mechanism that generates a very important overhead
and this fact is aggravated by the proliferation of
collisions, which overloads the system and generates
a very large number of non-accomplished
transmissions. In the case of our protocol, these
results can be explained by the fact that we use an
efficient reactive route discovery procedure instead
of using a broadcast mechanism. Figure 4, which
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
36
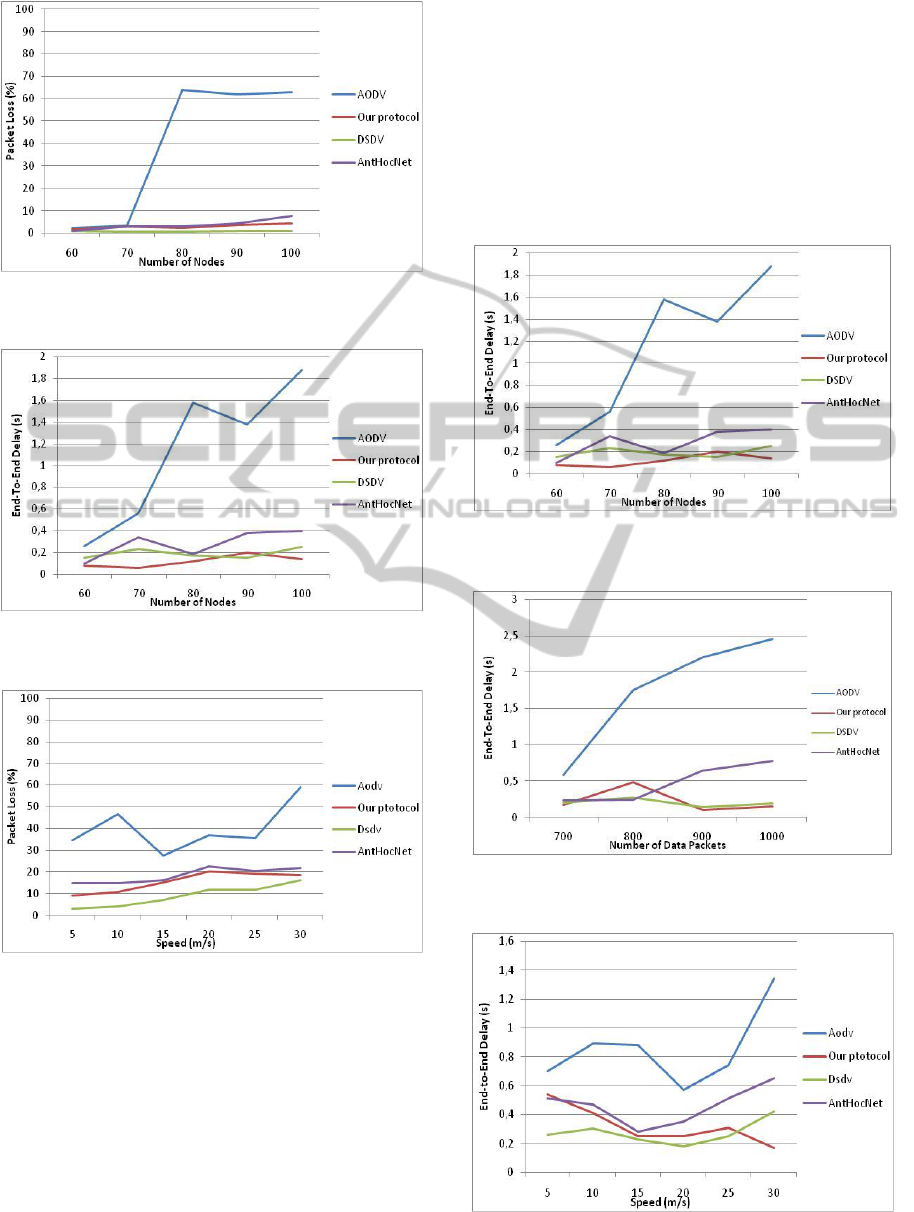
Figure 2: Packet loss ratio according to the number of
nodes.
Figure 3: Packet loss ratio according to the total number of
data packets.
Figure 4: Packet loss ratio/nodes speed.
represents the variation of % packet loss considering
the variation of nodes speed, shows that our protocol
have less lost packets than AODV and AntHocNet
protocols when we vary the nodes speed. This result
may be partly explained by the fact that, in the case
of our protocol, the link failures are partly supported
by the proactive phase.
5.1.2 The End-to-End Delay
Figures 5, 6 and 7 show the average times of
transmission in each protocol, considering
respectively the number of nodes in the network, the
total number of packets and the nodes speed. We can
see that our protocol and the DSDV protocol
generate less important delays than those generated
by the AODV and AntHocNet protocols. Our
protocol and DSDV protocol are both more efficient
Figure 5: End-to-end delay (s) according to the number of
nodes in the network.
Figure 6: End-to-end delay (s) according to the total
number of data packets.
Figure 7: End-to-end delay (s)/speed (m/s) of nodes.
AMobileMultiAgentSystemforRoutinginAdhocNetwork
37
than AODV and AntHocNet protocols, especially in
the case of a large number of nodes and data packets,
and more specifically in the case of high nodes
speeds. Regarding our protocol, this may be due to
three main reasons:
The hybrid character of our route discovery
scheme reduces significantly the transmission
times. Indeed, thanks to the proactive phase, it
is no longer necessary to make, at each time, a
route request; the route could exist in the
routing table;
As our protocol is multipath, it allows each
node to have several paths (towards the same
destination) whenever it wants to send a data
packet;
Unlike AODV protocol, our protocol does not
require, during the reactive phase, a
broadcasting technique; indeed, this latter
exponentially increases the routing overhead
and thus overloads the network; consequently it
delays the paths establishment and the data
packets delivery process.
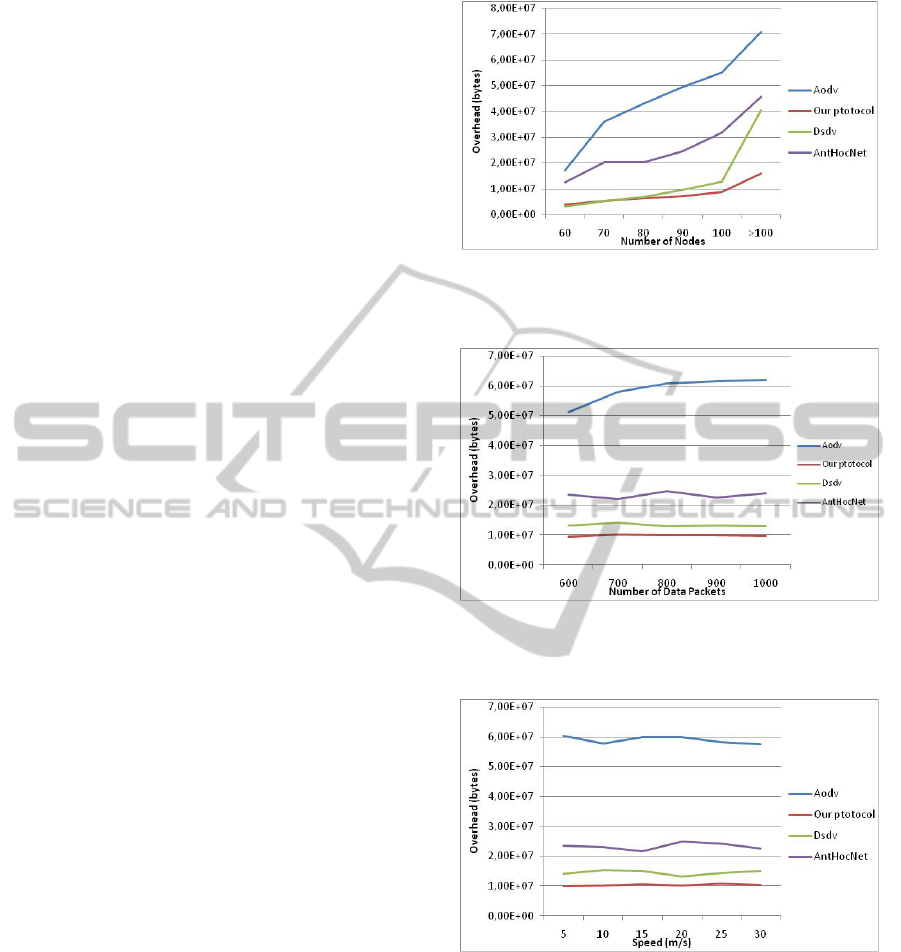
5.1.3 The Communication Overhead
The packets that consume much bandwidth are those
issued during the path discovery and maintenance
phases. Therefore, we have measured the use of
control messages by each studied protocol during
these phases. Figures 8, 9 and 10 show the
communication overhead in terms of, respectively,
control packets size according to the number of
nodes, the node activities and the speed of nodes.
We can see an important difference between our
protocol and both AODV and AntHocNet protocols.
The number of control packets increases slowly and
linearly in our protocol, either by increasing the
number of nodes or by increasing the network
traffic, while it increases rapidly in the case of
AODV protocol. This could be explained by the fact
that in the case of our protocol, the number of agents
is managed and controlled by each node and this
number is still proportional to the number of nodes
in the network and to the transmission frequency of
agents. Besides, we avoid the broadcast technique
that generates a lot of overhead. Instead, we use a
more accurate and a more intelligent technique
which only makes use of the available agents in the
network. In AODV protocol, the number of control
packets depends on many factors, including the
number of route requests that consume much
bandwidth, since they require a significant number
of broadcasts. Moreover, we can expect an important
number of collisions due to the broadcast technique
Figure 8: The communication overhead (total size (bytes)
of control packets) according to the number of nodes in
the network.
Figure 9: The communication overhead (total size (bytes)
of control packets) according to the total number of data
packets.
Figure 10: The communication overhead (total size (bytes)
of control packets) /speed (m/s) of nodes.
and to the network density. The collisions lead to the
increasing of the number of retransmissions, which
consequently induces the increasing of the total
number of packets in the network.
Figures 8, 9 and 10 show also that our protocol
generates less overhead than DSDV protocol. This
proves the effectiveness of our protocol, since the
protocol DSDV is known to be efficient in this type
of network.
PECCS2014-InternationalConferenceonPervasiveandEmbeddedComputingandCommunicationSystems
38

6 CONCLUSIONS
In this paper we have presented a generic model of
Multi-agent System dedicated to applications in
dynamic networks. We have shown its feasibility in
the case of the routing problem in ad hoc networks.
We have presented a novel ant-based routing
protocol for MANETs. It is a hybrid algorithm
combining reactive route setup with proactive route
probing and exploration.
Considering the simulations results obtained
using the proposed algorithm, we can argue that that
our protocol reduces significantly the routing
overhead and transmission delays. Regarding
routing overhead, our algorithm out performs
AODV and AntHocNet protocols which are
supposed to generate fewer messages than the pure
proactive routing protocols such as DSDV even if
our protocol doesn’t deterministically establish the
best path. This latter fact is mainly due to the
operating principle of our protocol: It doesn’t require
any broadcasting mechanism that leads to increase
the number of control messages. Regarding latency,
our algorithm allows also to achieve better results
than AODV and AntHocNet. This proves the
effectiveness of the proactive facet of our protocol
and the usefulness of the underlying process that
consists in computing several paths for the same
destination.
In future work we plan to improve the
exploratory working of quality of service. Our main
idea relies on the assumption that the movement of
Agent depends on the quantity of pheromone at each
node which represents in our case study, the number
of path requests in the network. Considering this
assumption, we would design an intelligent
distribution of Agent in the network according to the
needs of each zone. More specifically, we plan to
enhance our protocol with an interesting dynamic
property leading to adapt itself according to the
nodes activities in attempt to better exploit the Agent
capabilities. The quantity of Pheromones could also
be used in order to manage the number of Agent in
the network and thus control the network
congestion.
We also plan to use our multi-agent system to
another dynamic environment as a P2P network; the
principle is to use this model to ensure the
anonymity of users in a P2P network.
REFERENCES
Bouazizi, I., (2002). The ant-colony based routing
algorithm for manets. In Proceedings of the 2002
international conference on parallel processing
workshops, IEEE Computer Society, Washington, DC,
p. 79.
Caro, G. D., Ducatelle, F., & Gambardella, L. M., (2005).
An adaptive nature-inspired algorithm for routing in
mobile ad hoc networks. European Transactions ON
Telecommunications, 16, 443–455.
Clausen, T., & Jacquet, P., (2003). Optimized Link State
Routing Protocol (OLSR), IETF RFC 3626.
Correia, F., & Vaza ̃o, T., (2008). Simple ant routing
algorithm Information Networking. International
Conference, pp. 1–8.
Correia, F., Vaza ̃o, T., & Lobo, V. J., (2009). Models for
Pheromone Evaluation in Ant Systems for Mobile Ad-
hoc Networks. In Proceedings of the 2009 First
International Conference on Emerging Network
Intelligence (EMERGING ’09), IEEE Computer
Society, Washington, DC, pp. 85-90.
Di Caro, G., & Dorigo, M., (1998). Distributed
stigmergetic control for communications networks.
Journal of Artificial Intelligence Research, 9, 317–
365.
Dorigo, M., Birattari, M., & Stutzle, T., (2006). Ant
colony optimization. IEEE Computational
Intelligence Magazine, 1(4), 28–39.
Ferber, J., 1997. Les systèmes Multi agents – Vers une
intelligence collective.
Johnson, D. B., Maltz, D. A., & Broch, J., (2001). DSR:
The dynamic source routing protocol for multihop
wireless ad hoc networks. In Ad hoc networking.
Addison-Wesley Longman Publishing CO., INC.,
Boston, MA, pp. 139–172.
Laxmi, V., Jain, L., & Gaur, M. S., (2006). Ant colony
optimisation based routing on NS-2. International
Conference on Wireless Communication and Sensor
Networks (WCSN), INDIA.
Perkins, C., & Bhagwat, P., (1993). Highly dynamic
destination sequenced distance vector routing (dsdv)
for mobile computers pp. 234–244.
Perkins, C. E., & Royer, E. M., (1997). Ad hoc on-demand
distance vector routing. In Proceedings of the second
IEEE workshop on mobile computing systems and
applications, pp. 90–100.
Royer, E. M., & Toh, C.-K., (1999). A review of current
routing protocols for ad hoc mobile wireless networks.
IEEE Personal Communications, 6, 46–55.
AMobileMultiAgentSystemforRoutinginAdhocNetwork
39
