
Training Optimum-Path Forest on Graphics Processing Units
Adriana S. Iwashita
1
, Marcos V. T. Romero
1
, Alexandro Baldassin
2
, Kelton A. P. Costa
1
and Jo
˜
ao P. Papa
1
1
Department of Computing, S
˜
ao Paulo State University, Bauru, S
˜
ao Paulo, Brazil
2
Department of Statistics, Applied Mathematics and Computation, S
˜
ao Paulo State University, Rio Claro, S
˜
ao Paulo, Brazil
Keywords:
Optimum-Path Forest, Graphics Processing Unit.
Abstract:
In this paper, we presented a Graphics Processing Unit (GPU)-based training algorithm for Optimum-Path
Forest (OPF) classifier. The proposed approach employs the idea of a vector-matrix multiplication to speed
up both traditional OPF training algorithm and a recently proposed Central Processing Unit (CPU)-based
OPF training algorithm. Experiments in several public datasets have showed the efficiency of the proposed
approach, which demonstrated to be up to 14 times faster for some datasets. To the best of our knowledge, this
is the first GPU-based implementation for OPF training algorithm.
1 INTRODUCTION
Pattern recognition techniques have as the main goal
to learn a discriminative function that separates the
dataset samples in different classes. Such learning
process is performed over a training set, which can
be labeled or not, and the effectiveness of the classi-
fier is assessed on a testing set (Duda et al., 2000).
Thus, the learning is the most important phase of a
classifier, and also the most computational expensive.
In the recent years, there is a considerable number
of works that focuses on developing machine learn-
ing algorithms on Graphics Processing Units (GPUs).
Catanzaro et al. (Catanzaro et al., 2008), for instance,
presented a GPU-based implementation for the well-
known Support Vector Machines (SVM) classifier,
which was about 9 − 35× faster when compared to
the traditional CPU (Central Processing Unit) imple-
mentation.
In the same year, Do et al. (Do et al., 2008) also
proposed an SVM implementation on GPUs, and Jang
et al. (Jang et al., 2008) presented an Artificial Neu-
ral Network (ANN) version using Compute Unified
Device Architecture (CUDA) and OpenMP (Open
Multi-Processing), which is a library for concurrent
programming. In this work, the authors highlighted
the importance of considering the real needs of mas-
sive programming, i.e., the algorithms that will be im-
plemented in such parallel environments need to con-
tain modules that can be executed concurrently. Oth-
erwise, the throughput of data interchange between
processors may degrade the performance of the whole
system.
Papa et al. (Papa et al., 2009a; Papa et al., 2012)
proposed a pattern recognition technique called Opti-
mum Path Forest (OPF) aiming to overcome the time
spent with the learning phase. They showed that OPF
can obtain similar effectiveness to SVM, but it can be
faster in the training phase. The OPF models the prob-
lem of pattern recognition as a graph partition into
optimum-path trees (OPTs), which are rooted by key
samples (prototypes) that compete among themselves
in order to conquer the remaining samples. Further,
Iwashita et al. (Iwashita et al., 2012) proposed an opti-
mization of the OPF training algorithm in CPU, being
such approach up to two times faster than traditional
OPF with similar recognition rates.
In this paper, we presented an GPU-based imple-
mentation of the OPF training phase, which can be
faster than traditional OPF and also more efficient
than the approach proposed in (Iwashita et al., 2012).
We have validated the proposed technique using sev-
eral public datasets. As far as we know, this is the first
GPU-based implementation of the OPF classifier. The
remainder of this paper is organized as follows. Sec-
tions 2 and 3 present the OPF background and the pro-
posed CUDA-based training algorithm, respectively.
Section 4 discusses the experimental results, and Sec-
tion 5 states conclusions.
581
S. Iwashita A., V. T. Romero M., Baldassin A., A. P. Costa K. and P. Papa J..
Training Optimum-Path Forest on Graphics Processing Units.
DOI: 10.5220/0004737805810588
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 581-588
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

2 PATTERN CLASSIFICATION
USING OPTIMUM-PATH
FOREST
Let Z = Z
1
∪ Z
2
be a dataset were Z
1
and Z
2
are the
training and test sets, respectively, with |Z
1
| and |Z
2
|
samples. Let λ(s) be the function which associates the
correct label i, i = 1,2,. . . , c to any sample s ∈ Z
1
∪Z
2
from class i. Let S ∈ Z
1
be the set of prototype sam-
ples, and let ~v be the algorithm that extracts n features
from any sample s ∈ Z
1
∪Z
2
, and return a feature vec-
tor ~v(s) ∈ ℜ
n
. The distance d(s,t) between two sam-
ples, s and t, is given by the distance between his fea-
ture vectors ~v(s) e ~v(t). The problem consists in use
S, (~v,d), Z
1
and Z
2
to project an optimal classifier,
which can predict the correct label λ(s) of any sample
s ∈ Z
2
.
Let (Z
1
,A) be a complete graph in which nodes
are samples in Z
1
, where any pair of samples defines
a edge on A (i.e., A = Z
1
XZ
1
), creating a completed
weighted graph of Z
1
set. A path is a sequence of
samples π =
h
s
1
,s
2
,. . . , s
k
i
, where (s
i
,s
i+1
) ∈ A for
1 ≤ i ≤ k − 1. A path is said to be trivial if π = hs
1
i.
It is associated for each path π the cost given by a
smooth cost function f (Falc
˜
ao et al., 2004), denoted
by f (π). A path is optimum if f (π) ≤ f (τ) for any
path τ, where π and τ ends in the same sample s, re-
gardless of their origin. We also denote π · hs,ti the
concatenation of the path π ending in s and edge (s,t).
The OPF algorithm can be used with any soft cost
function, which can combine samples with similar
properties (Falc
˜
ao et al., 2004). However, the OPF
was designed using the f
max
cost function, due to
its theoretical properties to estimate optimum proto-
types (All
`
ene et al., 2007):
f
max
(hsi) =
0 if s ∈ S,
+∞ otherwise
f
max
(π · hs,ti) = max{ f
max
(π),d(s,t)}, (1)
the f
max
(π) compute the maximum distance between
adjacent samples in π, when π is not a trivial path.
The OPF algorithm associates an optimal path
P
∗
(s) of S to all samples s ∈ Z
1
, making a optimum
path forest P (a function without cycles which asso-
ciates to all s ∈ Z
1
his predecessor P(s) in P
∗
(s), or
assigns nil when s ∈ S). Let R(s) ∈ S the root of
P
∗
(s) which can be achieved using P(s). The OPF
algorithm computes, for each s ∈ Z
1
, the cost V(s) of
P
∗
(s), the label L(s) = λ(R(s)) and his predecessor
P(s).
We say S
∗
is an optimum set of prototypes when
the algorithm propagates the labels L(s) = λ(s) for all
s ∈ Z
1
. Thus, S
∗
can be found by exploring the the-
oretical relationship between the Minimum Spanning
Tree (MST) (All
`
ene et al., 2007) and the minimum
path tree to f
max
. The training consists essentially of
two steps: finding S
∗
and a OPF classifier rooted at
S
∗
.
When we compute a MST on the completed graph
(Z
1
,A), we obtain a connected acyclic graph whose
nodes are all the samples in Z
1
, and the edges are not
directed and weighted. Their weights are given by the
distance d between the features vectors of adjacent
samples. This spanning tree is optimum in the sense
that the sum of the weights of its edges is minimal
compared to other spanning trees on the completed
graph. On MST, each pair of samples is connected by
a path, which is optimum under f
max
.
The optimum prototypes are the connected ele-
ments on MST with different labels Z
1
, i.e., the clos-
est elements from different classes. By removing the
edges between different classes, such adjacent sam-
ples become prototypes in S
∗
and can compute an
optimum path forest without misclassification at Z
1
(competition process). Therefore, each prototype de-
fines its own Optimum-Path Tree (OPT), and the col-
lection of all OPT’s define the optimum-path forest,
which gives the name to the classifier.
The classification step is straightforward, i.e.,
given a test sample s ∈ Z
2
, we connect it to all train-
ing nodes of the optimum-path forest generated in the
training phase, and we evaluate which node p ∈ Z
1
minimizes the equation below:
V (s) = min
∀Z
1
max{V (p),d(p,s)}. (2)
Thus, the node p ∈ Z
1
that minimizes V (s) will be the
one that conquer s.
3 TRAINING OPTIMUM-PATH
FOREST ON CUDA
The implementation of the OPF training phase on
CUDA environment was conducted using particular
code instructions to execute similar actions in paral-
lel. As graphics cards have their processing structures
organized into parallel architectures, it is important to
shed light over the implemented algorithms must have
parallelizable modules to obtain performance gain.
As described in Section 2, the OPF training step
is composed by two modules: (i) the first one com-
putes the MST over the complete graph and marks
the connected elements with different labels as proto-
types; and (ii) with prototypes in hand, we can pro-
ceed with the competition process between them to
build the OPTs.
The proposed GPU-based implementation of OPF
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
582

classifier also employs the above idea, i.e., we first
paralleled the MST computation and then the com-
petition process between prototypes. For both ap-
proaches, there are three main steps: to find the el-
ement p with lowest cost that will try to conquer the
other nodes, to calculate the distance between node p
and other nodes, and to verify whether the node p can
conquer other nodes or not.
In this paper, we adopted a similar procedure to
compute the MST and the optimum-path forest. The
methodology is basically the same, i.e., one needs to
find the node with lowest cost to begin the competi-
tion process. Considering the MST computation, for
instance, the root node r will be associated with cost
0, and the remaining nodes with cost +∞. Thus, we
can force r to control the MST computation. The next
step is to compute the distance between r and the re-
maining nodes to find out the shortest one, which will
be the new leader, i.e., the sample t with lowest cost.
This procedure can be conducted using f
sum
, which is
similar to f
max
path-cost function (Equation 1):
f
sum
(hsi) =
0 if s ∈ S,
+∞ otherwise
f
sum
(π · hs,ti) = f
sum
(π) + d(s,t). (3)
In this case, S stands for the set of root nodes. In
the context of MST computation, we have only one
root node. As one can see, the cost offered to t is just
the summation of the cost of s with the distance (arc-
weight) between s and t. Notice that we can slightly
change some points to make the above procedure ca-
pable to compute the optimum-pat forest: instead of
using just one node root to begin the competition al-
gorithm to compute MST, we can now use a set of
prototype nodes, i.e., the connected nodes in the min-
imum spanning tree with different labels. Then, we
can place f
max
instead of f
sum
and execute the compe-
tition process again.
In regard to the first step, i.e., to find out the ele-
ment with the lowest cost, we employed the primitive
min element from Thrust (Hoberock and Bell, 2010)
library, which returns the element with the lowest cost
from a set of nodes using parallel algorithms. Thrust
is a library to the development of parallel algorithms
based on the C++ STL (Standard Template Library),
and works like a high-level interface to increase de-
veloper productivity.
The next step is to compute the distance between
the current node and the remaining ones. In this case,
we employed a collection of threads to take care of a
set of nodes. This means the distance between node
p and the remaining nodes of the graph will be com-
puted in parallel using an approach similarly to a mul-
tiplication of a matrix by a vector (Fujimoto, 2008).
The rows of this matrix, called here as “feature ma-
trix” , are the training set nodes represented by their
feature vectors. This matrix is allocated in the tex-
ture memory, and can be accessed by all threads; the
feature vector of a node p is allocated on the global
memory.
A thread is allocated for each element of the fea-
ture matrix, which will calculate the distance between
an element of the matrix with node p, storing this re-
sult in a “partial results matrix”. Each block of threads
has an array of partial results, which are allocated in
the shared memory of them. The final result (dis-
tances between p and other nodes) is a distance vec-
tor allocated on the global memory, in which posi-
tion i means the distance between nodes p and i. The
level of parallelism of these operations can be classi-
fied as fine-granularity, since there are a large number
of small and simple processes running on the instruc-
tion level.
Figures 2 to 10 exemplifies the proposed ap-
proach. Figure 1 illustrates the training set: the graph
nodes are initialized with cost ∞, and the node 1 will
be the root of the MST; thus the cost 0 is assigned to
it. As aforementioned, the first step of OPF training
algorithm is to compute the MST and to find the pro-
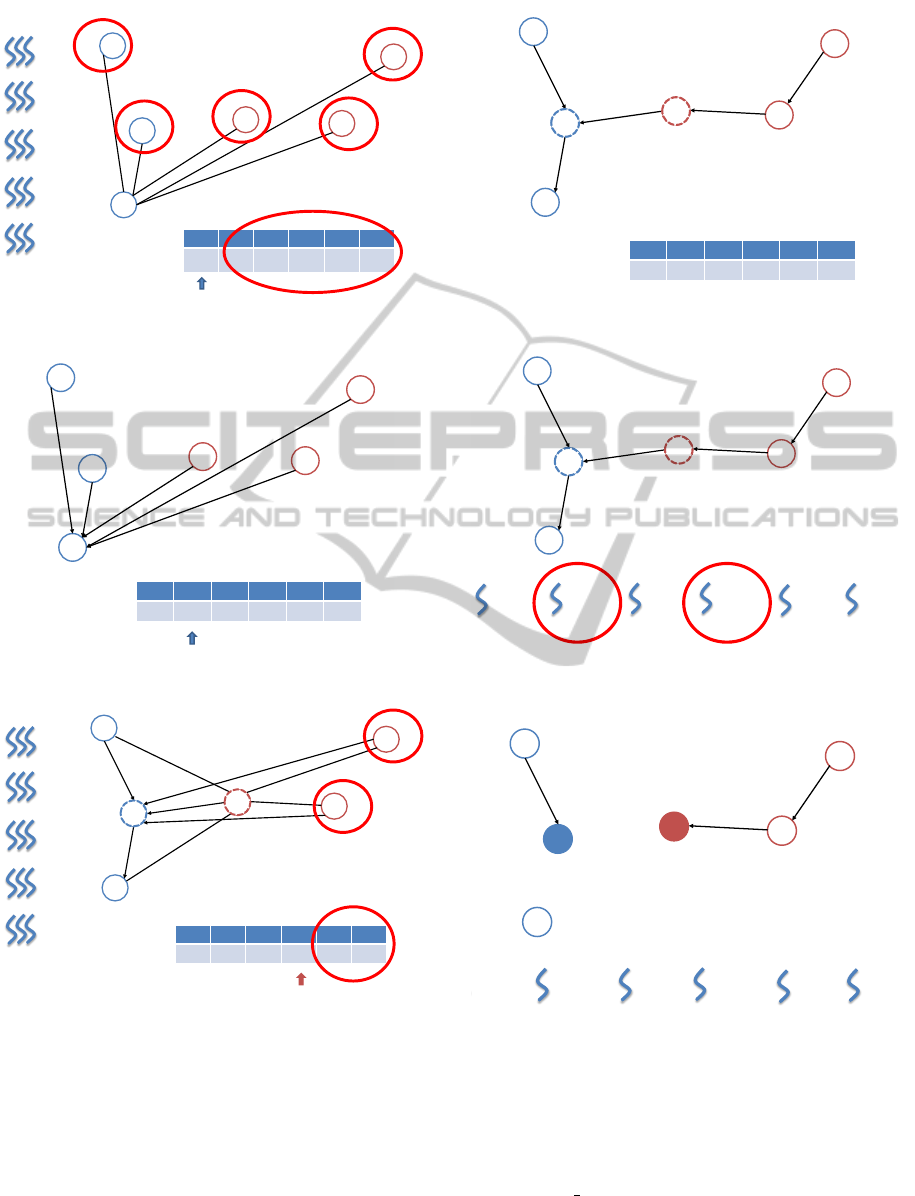
totypes. In Figure 2, we can face the situation when
the proposed algorithm is in the first iteration (MST
computation). Using the min element primitive, node
1 leaves the queue to conquer the remaining nodes,
since it has the lowest cost. The set of GPU threads is
responsible for calculating the distance between node
1 and the other nodes; it also verifies whether the node
cost is lower than the distance offered by node 1.
Figure 3 illustrates the situation after the first iter-
ation, and the selection of node 2 (using min element
primitive) as the next dominant node. The dotted
nodes in Figure 4 represent the prototypes found out
after the 4th iteration. The arrow highlights the node
4, which will begin the conquering process. As
showed in Figure 2, node 4 now leaves the queue to
conquer the other nodes, and the set of GPU threads is
Priority queue
0
∞
∞
∞
∞
∞
1
2
3
4
5
6
1
2
3
4
5
6
0
∞
∞
∞
∞
∞
Figure 1: Training set.
TrainingOptimum-PathForestonGraphicsProcessingUnits
583
7
2.8
5.5
13.4
10.6
0
∞
∞
∞
∞
∞
1
2
3
4
5
6
d1 = 7
d2 = 2.8
d3 = 5.5
d4 = 13.4
d5 = 10.6
1
2
3
4
5
6
0
∞
∞
∞
∞
∞
Priority queue
Figure 2: First iteration of the MST algorithm.
0
1
2
3
4
5
6
1
2
3
4
5
6
0
2.8
7
5.5
10.6
13.4
2.8
7
5.5
10.6
13.4
Priority queue
Figure 3: Step 2 of the MST algorithm.
0
1
2
3
4
5
6
2.8
3
4
9.8
12.4
d1 = 5.5
d2 = 4
d3 = 6
d4 = 7
d5 = 3.8
1
2
3
4
5
6
0
2.8
3
4
9.8
12.4
6
3.8
7
5.5
4
2
4
Priority queue
Figure 4: After the 4th iteration, two prototypes are found
out and node 4 now conquers two nodes.
responsible for calculating the distance between node
4 and the other nodes.
Figure 5 depicts the final MST, and the dotted
nodes stand for the prototypes. Figure 6 illustrates
the set of nodes after the MST construction. In this
phase, each thread is responsible for updating a node,
i.e., each thread verifies whether the node has been as-
signed as a prototype or not. If the node is prototype,
the thread updates the node cost to 0 and updates this
0
1
2
3
4
5
6
2.8
3
4
3.8
2.6
1
2
3
4
5
6
0
2.8
3
4
3.8
2.6
2
4
Priority queue
Figure 5: MST generated for the training set.
0
1
2
3
4
5
6
2.8
3
4
3.8
2.6
p1 = 0
p2 = 1 p3 = 0 p4 = 1
p5 = 0
p6 = 0
2
4
Figure 6: Each thread responsible for checking whether a
node is a prototype or not.
1
2
3
4
5
6
0
0
∞
∞
∞
∞
p1 = 0
p2 = 1 p3 = 0 p4 = 1
p5 = 0
p6 = 0
Figure 7: Each thread updates the cost of the node; and if it
is also a prototype, the thread updates its predecessor.
predecessor node to NIL. If the node is not a proto-
type, this cost value will be ∞. Figure 7 illustrates the
nodes after the aforementioned updating process.
Figure 8 illustrates the 2nd phase of the training
step: the min element primitive chooses the prototype
node 2 to leave the queue and then to conquer the re-
maining nodes.
Figure 9 shows the node 2 on action: each set
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
584

1
2
3
4
5
6
0
∞
∞
∞
0
∞
1
2
3
4
5
6
∞
0
∞
0
∞
∞
Priority queue
Figure 8: Graph with the prototypes marked: 2nd phase of
the training step.
1
3
3
2.8
4
9.8
12.4
0
∞
∞
∞
0
∞
1
2
3
4
5
6
∞
0
∞
0
∞
∞
d1 = 2.8
d2 = 3
d3 = 12.4
d4 = 4
d5 = 9.8
If Max{0; dist(2,n)} < w(n)
2
4
5
6
Priority queue
Figure 9: Each set of threads calculates the distance be-
tween 2 and the other nodes.
2
4
0
0
2.8
3
3.8
3.8
1
3
5
6
Figure 10: Resulting optimum-path forest.
of GPU threads is responsible for calculating the dis-
tance between node 2 and the other nodes. Using the
path-cost function f
max
(Equation 1), node 2 tries to
conquer the other nodes.
Finally, Figure 10 presents the resulting optimum-
path forest using the proposed algorithm.
4 EXPERIMENTS
In this section, we discuss the experiments conducted
in order to show the efficiency of the proposed opti-
mization for OPF training step. We have used several
public datasets with different sizes to assess the train-
ing efficiency, and also the classification accuracy in
distinct scenarios. Table 1 presents the datasets used
in this work.
Table 1: Datasets used in the experiments. With respect to
Covtype, we have used 25% of the original dataset.
Dataset # Samples # Features
Connect (Frank and Asuncion, 2013) 67557 126
Indian Pine (Landgrebe, 2005) 21025 220
Letter (King et al., 1995) 15000 16
Mnist (LeCun et al., 1988) 60000 780
Poker (Frank and Asuncion, 2013) 25010 10
Salinas (Kaewpijit et al., 2003) 111104 204
In regard to training and test set sizes, we em-
ployed a cross-validation procedure with different
percentages for that sets, which range from 10% to
90% of the training set size, with steps of 10. In or-
der to validate the proposed GPU-based OPF train-
ing algorithm, we have compared it against traditional
OPF and the optimization presented by Iwashita et
al. (Iwashita et al., 2012).
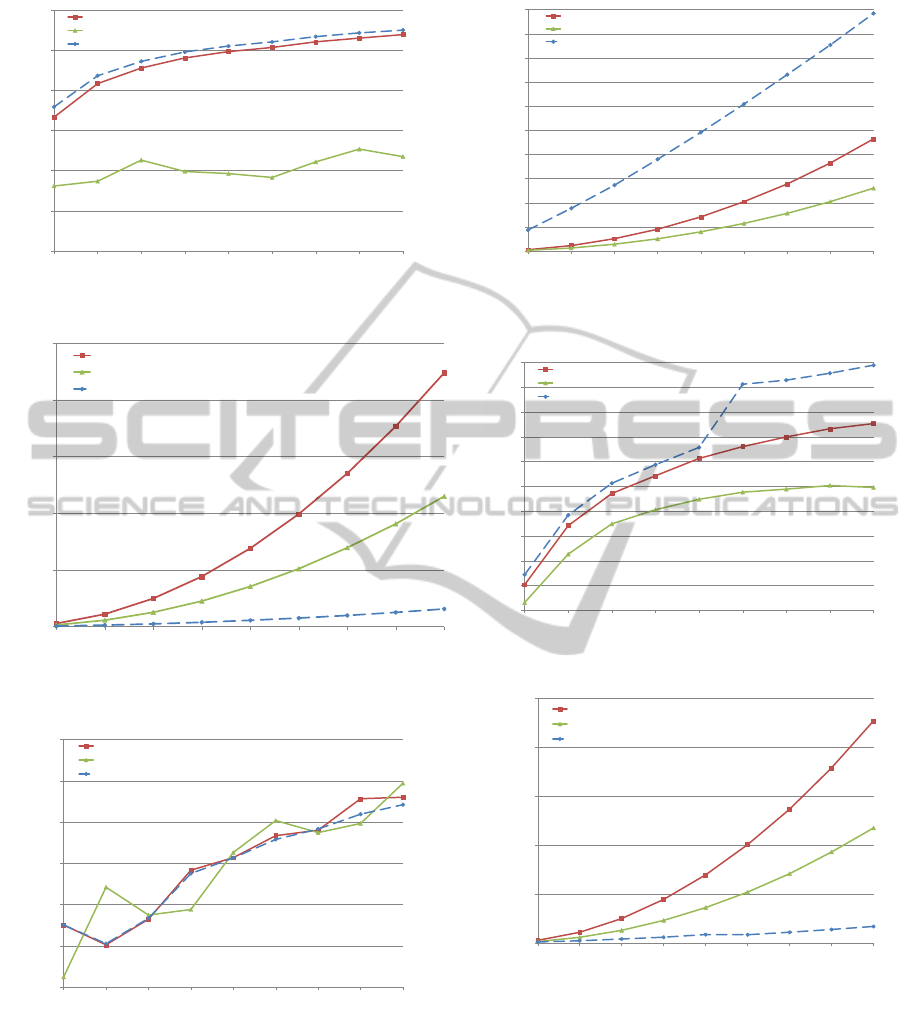
Figures 11 and 12 display, respectively, the mean
accuracy and training times with different percentages
of training and test sets for Connect dataset. Notice
the proposed approach has a gain about 2.523 with
30% of the training set. If we consider 90% of train-
ing dataset, the GPU-based OPF is about 5.522 faster
than traditional one. Notice the accuracies are also
similar among the compared techniques, being the
proposed approach also faster than the algorithm pro-
posed by (Iwashita et al., 2012).
Figures 13 and 14 display, respectively, the mean
accuracy and training times for Indian Pine dataset.
Considering 40% of the training set size, the proposed
approach has been 2.004 times faster for training than
traditional OPF. If we take into account 90% of train-
ing set size, the gain of GPU-based OPF is 4.021
times when compared with traditional OPF.
Figures 15 and 16 display, respectively, the mean
accuracy and training times for Letter dataset. Notice
the proposed approach was 1.825 times slower than
traditional OPF with 90% of the training set size. This
same behaviour can be observed with Poker dataset
(Figures 19 and 20). The problem concerns with the
few number of features in these datasets, which did
not compensate the data interchange between CPU
and GPU, since the distances are also computed us-
ing different threads.
Figures 17 and 18 display, respectively, the mean
accuracy and training times for Mnist dataset. In this
TrainingOptimum-PathForestonGraphicsProcessingUnits
585

62,5
63
63,5
64
64,5
65
65,5
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean accuracy
[7]
Figure 11: Mean classification accuracy for Connect
dataset.
0
50
100
150
200
250
300
350
400
450
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean execution time [s]
[7]
Figure 12: Mean execution times in seconds with respect to
training step for Connect dataset.
67
68
69
70
71
72
73
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean accuracy
[7]
Figure 13: Mean classification accuracy for Indian Pine
dataset.
case, we can see a gain of 14.405 times with 90%
of the training size of the proposed approach when
compared against with traditional OPF.
Figures 21 and 22 display, respectively, the mean
accuracy and training times for Salinas dataset. If we
consider 10% of the training set size, the proposed
approach is 3.038 times faster than traditional OPF; if
we take into account 90% of the training set size, the
0
10
20
30
40
50
60
70
80
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean execution time [s]
[7]
Figure 14: Mean execution times in seconds with respect to
the training step for Indian Pine dataset.
89
90
91
92
93
94
95
96
97
98
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean accuracy
[7]
Figure 15: Mean classification accuracy for Letter dataset.
0
1
2
3
4
5
6
7
8
9
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean execution time [s]
[7]
Figure 16: Mean execution times in seconds with respect to
the training step for Letter dataset.
proposed approach is 13.580 faster than traditional
OPF. In this case, the GPU-based OPF has been more
accurate than the compared variants.
5 CONCLUSIONS
In this paper, we presented a GPU-based training al-
gorithm of the OPF classifier. Our approach employs
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
586
93
94
95
96
97
98
99
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean accuracy
[7]
Figure 17: Mean classification accuracy for Mnist dataset.
0
500
1000
1500
2000
2500
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean execution time [s]
[7]
Figure 18: Mean execution times in seconds with respect to
training step for Mnist dataset.
51,5
51,7
51,9
52,1
52,3
52,5
52,7
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean accuracy
[7]
Figure 19: Mean classification accuracy for Poker dataset.
the idea of a vector-matrix parallel multiplication, in
which the same framework is employed for both MST
and optimum-path forest computation.
Experimental results have shown that the pro-
posed technique have obtained similar recognition
rates to those obtained by the traditional approach and
the CPU-based optimization proposed by Iwashita et
al. (Iwashita et al., 2012). Additionally, the proposed
0
2
4
6
8
10
12
14
16
18
20
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean execution time [s]
[7]
Figure 20: Mean execution times in seconds with respect to
the training step for Poker dataset.
85
86
87
88
89
90
91
92
93
94
95
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean accuracy
[7]
Figure 21: Mean classification accuracy for Salinas dataset.
0
500
1000
1500
2000
2500
10
20
30
40
50
60
70
80
90
Traditional OPF
Optimization proposed by [2]
Cuda OPF
Training set percentage
Mean execution time [s]
[7]
Figure 22: Mean execution times in seconds with respect to
the training step for Salinas dataset.
approach has been faster for training, except when we
have datasets with a few features. In this case, the
throughput of the data interchange between CPUs and
GPUs did not compensate the parallelization effort. In
datasets with a considerable number of features, we
have observed a gain up to 14 times.
TrainingOptimum-PathForestonGraphicsProcessingUnits
587

ACKNOWLEDGEMENTS
The authors are grateful to FAPESP grants #2009/
16206-1, #2010/12697-8 and #2011/08348-0, and
CNPq grants #470571/2013-6 and #303182/2011-3.
REFERENCES
All
`
ene, C., Audibert, J. Y., Couprie, M., Cousty, J., and
Keriven, R. (2007). Some links between min-cuts,
optimal spanning forests and watersheds. In Proceed-
ings of the International Symposium on Mathematical
Morphology, pages 253–264. MCT/INPE.
Catanzaro, B., Sundaram, N., and Keutzer, K. (2008). Fast
support vector machine training and classification on
graphics processors. In Proceedings of the 25th inter-
national conference on Machine learning, pages 104–
111, New York, NY, USA. ACM.
Do, T.-N., Nguyen, V.-H., and Poulet, F. (2008). Speed
up svm algorithm for massive classification tasks. In
Proceedings of the 4th international conference on
Advanced Data Mining and Applications, pages 147–
157, Berlin, Heidelberg. Springer-Verlag.
Duda, R. O., Hart, P. E., and Stork, D. G. (2000). Pattern
Classification (2nd Edition). Wiley-Interscience.
Falc
˜
ao, A., Stolfi, J., and Lotufo, R. (2004). The image
foresting transform theory, algorithms, and applica-
tions. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 26(1):19–29.
Frank, A. and Asuncion, A. (2013). UCI machine learning
repository.
Fujimoto, N. (2008). Faster matrix-vector multiplication on
geforce 8800gtx. In Proceedings of the IEEE Inter-
national Symposium on Parallel and Distributed Pro-
cessing, pages 1–8.
Hoberock, J. and Bell, N. (2010). Thrust: A
Parallel Template Library. Available at
http://www.meganewtons.com/, Version 1.3.0.
Iwashita, A. S., Papa, J. P., Falc
˜
ao, A. X., Lotufo, R.,
Oliveira, V. M., Albuquerque, V. H. C., and Tavares,
J. M. R. S. (2012). Speeding up optimum-path forest
training by path-cost propagation. In Proceedings of
the XXI International Conference on Pattern Recogni-
tion, pages 1233–1236.
Jang, H., Park, A., and Jung, K. (2008). Neural network im-
plementation using cuda and openmp. In DICTA ’08:
Proceedings of the 2008 Digital Image Computing:
Techniques and Applications, pages 155–161, Wash-
ington, DC, USA. IEEE Computer Society.
Kaewpijit, S., Moigne, J., and El-Ghazawi, T. (2003).
Automatic reduction of hyperspectral imagery using
wavelet spectral analysis. IEEE Transactions on Geo-
science and Remote Sensing, 41(4):863–871.
King, R. D., Feng, C., and Sutherland, A. (1995). Stat-
log: Comparison of classification algorithms on large
real-world problems. Applied Artificial Intelligence,
9(3):289–333.
Landgrebe, D. (2005). Signal Theory Methods in Multi-
spectral Remote Sensing. Wiley, Newark, NJ.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1988).
Gradient-based learning applied to document recogni-
tion. Available at http://yann.lecun.com/exdb/mnist/.
Papa, J. P., Falc
˜
ao, A. X., Albuquerque, V. H. C., and
Tavares, J. M. R. S. (2012). Efficient supervised
optimum-path forest classification for large datasets.
Pattern Recognition, 45(1):512–520.
Papa, J. P., Falc
˜
ao, A. X., and Suzuki, C. T. N. (2009a).
Supervised pattern classification based on optimum-
path forest. International Journal of Imaging Systems
and Technology, 19(2):120–131.
Papa, J. P., S., C. T. N., and Falc
˜
ao, A. X. (2009b).
LibOPF: A library for the design of optimum-path
forest classifiers. Software version 2.0 available at
http://www.ic.unicamp.br/ afalcao/LibOPF.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
588
