
Structure from Motion
ToF-aided 3D Reconstruction of Isometric Surfaces
S. Jafar Hosseini and Helder Araujo
Institute of Systems and Robotics, Department of Electrical and Computer Engineering,
University of Coimbra, Coimbra, Portugal
Keywords:
Structure from Motion, Isometric Surface, ToF Camera, 3D Reconstruction.
Abstract:
This paper deals with structure-from-motion (SfM) for non-rigid surfaces that undergo isometric motion. Our
SfM framework aims at the joint estimation of the 3D surface and the camera motion by combining a ToF
range sensor and a monocular RGB camera through a template-based approach. Our goal is to use the 2D
low-resolution depth estimates provided by the TOF camera, in order to facilitate the estimation of non-rigid
structure using the high-resolution images obtained by means of a RGB camera. In this paper, we model
isometric surfaces with a triangular mesh. The ToF sensor is used to obtain the depth of a sparse set of 3D
feature points, from which the depth of the mesh vertices can be recovered using a multivariate linear system.
Subsequently, we form a non-linear constraint based on the projected length of each edge. A second non-linear
constraint is then used for minimizing re-projection errors. These constraints are finally incorporated into an
optimization scheme to solve for structure and motion. Experimental results show that the proposed approach
has good performance even if only a low-resolution depth image is used.
1 INTRODUCTION
Structure-from-motion can be defined as the problem
of simultaneous inference of the motion of a cam-
era and the 3D geometry of the scene solely from a
sequence of images. SfM was also extended to the
case of deformable objects. Non-rigid SfM is under-
constrained, which means that the recovery of non-
rigid 3D shape is an inherently ambiguous problem
(Paladini et al., 2009; Dai et al., 2012). Given a spe-
cific configuration of points on the image plane, dif-
ferent 3D non-rigid shapes and camera motions can
be found that fit the measurements. To solve this
ambiguity, prior knowledge on the shape and motion
should be used to constrain the solution. For exam-
ple, Aanaes et al. (Aans and Kahl, 2002) impose the
prior knowledge that the reconstructed shape does not
vary much from frame to frame while Del Bue et al.
(Del-Bue et al., 2006) impose the constraint that some
of the points on the object are rigid. The priors can
be divided in two main categories: the statistical and
the physical priors. For instance, the methods rely-
ing on the low-rank factorization paradigm (Aans and
Kahl, 2002; Del-Bue et al., 2006) can be classified
as statistical approaches. Learning approaches such
as (Zhou et al., 2012; Salzmann et al., 2007; Srivas-
tava et al., 2009; Gay-Bellile et al., 2006) also belong
to the statistical approaches. Physical constraints in-
clude spatial and temporal priors on the surface to re-
construct (Gumerov et al., 2004; Prasad et al., 2006).
A physical prior of particular interest is the hypothe-
sis of having an inextensible (i.e. isometric) surface
(Shen et al., 2010; Perriollat et al., 2010; Salzmann
et al., 2008). In this paper, we consider this type of
surface. This hypothesis means that the length of the
geodesics between every two points on the surface
should not change across time, which makes sense for
many types of material such as paper and some types
of fabric.
3D reconstruction of non-rigid surfaces from im-
ages is an under-constrained problem and many dif-
ferent kinds of priors have been introduced to restrict
the space of possible shapes to a manageable size.
Based on the type of the surface model (or represen-
tation) used, we can classify the algorithms for re-
construction of deformable surfaces. The point-wise
methods only reconstruct the 3D position of a rel-
atively small number of feature points resulting in
a sparse reconstruction of the 3D surface (Perriol-
lat et al., 2010). Physics-based models such as su-
perquadrics (Metaxas and Terzopoulos, 1993), trian-
gular meshes (Salzmann et al., 2008) or Thin-Plate
Splines (TPS) (Perriollat et al., 2010) have been also
utilized in other algorithms. In TPS, the 3D surface is
544
Hosseini S. and Araújo H..
Structure from Motion - ToF-aided 3D Reconstruction of Isometric Surfaces.
DOI: 10.5220/0004787505440552
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (ICPRAM-2014), pages 544-552
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

represented as a parametric 2D-3D map between the
template image space and the 3D space. Then, a para-
metric model is fit to a sparse set of reconstructed 3D
points in order to obtain a smooth surface which is not
actually used in the 3D reconstruction process.
There has been increasing interest in learning tech-
niques that build surface deformation models from
training data. More recently, linear models have been
learned for SfM applications (Torresani et al., 2003;
Llado et al., 2005). There has also been a number
of attempts at performing 3D surface reconstruction
without using a deformation model. One approach is
to use lighting information in addition to texture clues
to constrain the reconstruction process (White and
Forsyth, 2006), which has only been demonstrated
under very restrictive assumptions on lighting condi-
tions and is therefore not generally applicable.
A common assumption in deformable surface recon-
struction is to consider that the surface is inextensible.
In (Perriollat et al., 2010), the authors propose a
dedicated algorithm that enforces the inextensibility
constraints. However, the inextensibility constraint
alone is not sufficient to reconstruct the surface. An-
other sort of implementation is given by (Salzmann
and Fua, 2007; Salzmann et al., 2008). In these
papers, a convex cost function combining the depth
of the reconstructed points and the negative of the
reprojection error is maximized while enforcing the
inequality constraints arising from the surface inex-
tensibility. The resulting formulation can be easily
turned into a SOCP problem. A similar approach
is explored in (Shen et al., 2010). The approach of
(Perriollat et al., 2010) is a point-wise method. The
approaches of (Salzmann and Fua, 2007; Salzmann
et al., 2008; Shen et al., 2010) use a triangular mesh
as surface model, and the inextensibility constraints
are applied to the vertices of the mesh.
1.1 Model and Approach
In this work, we aim at the combined inference of the
3D surface and the camera motion while preserving
the geodesics by using a RGB camera aided by a ToF
range sensor. Usually, RGB cameras have high image
resolutions. With these cameras, one can use efficient
algorithms to calculate the depth of the scene, recover
object shape or reveal structure, but at a high compu-
tational cost. ToF cameras deliver depth map of the
scene in real-time but with insufficient resolution for
some applications. So, a combination of a common
camera and a ToF sensor can exploit the capabilities
of both. We assume that the fields of view of both the
RGB and ToF cameras mostly overlap. The goal of
the algorithm is to allow the 3D reconstruction when
matching is difficult and depth estimates are available
for a limited number of points on the surface. The de-
veloped approach performs SfM under the constraint
that the deformation be isometric.
1.2 Outline of the Paper
This paper is organized as follows: to model an iso-
metric surface, a triangular mesh as well as a pla-
nar reference configuration is used. In Section 3, the
matching between data from the range and RGB cam-
eras is described. Next, the estimation of the depth of
the mesh vertices based on the depth of the feature
points is described. The entire approach for estima-
tion of the 3D shape and motion is based on mini-
mizing the sum of both the re-projection errors and
the errors on the projected length of the mesh edges.
Experimental results and quantitative evaluation are
presented in the last section. We show that our ap-
proach is able to handle the isometry constraint indi-
rectly without having to directly apply this constraint.
In addition, it obviates the need for a dense set of 3D
points lying on the surface by effective use of a ToF
sensor.
2 NOTATION AND
BACKGROUND
2.1 Notation
Matrices are represented as bold capital letters ( A ∈
R
n×m
, n rows and m columns). Vectors are repre-
sented as bold small letters ( a ∈ R
n
, n elements). By
default, a vector is considered a column. Small letters
( a) represent one dimensional elements. By default,
the jth column vector of A is specified as a
j
. The jth
element of a vector a is written as a
j
. The element
of A in the row i and column j is represented as A
i,j
.
A
(1:2)
and a
(1:2)
indicate the first 2 rows of A and a.
A
(3)
and a
(3)
denote the third row of A and a, respec-
tively. Regular capital letters ( A) indicate one dimen-
sional constants. We use R after a vector or matrix to
denote that it is represented up to a scale factor.
2.2 Barycentric Coordinates
In geometry, the barycentric coordinate system is a
coordinate system in which the location of a point of
a simplex (a triangle, tetrahedron, etc.) is specified as
the center of mass, or barycenter, of masses placed at
its vertices.
StructurefromMotion-ToF-aided3DReconstructionofIsometricSurfaces
545
3 COMBINING DEPTH AND RGB
IMAGES
3.1 Mapping Between Depth and RGB
Images
The resolutions of the depth and RGB images are dif-
ferent. A major issue that directly arises from the
difference in resolution is that a pixel-to-pixel corre-
spondence between the two images can not be estab-
lished even if the FOVs fully overlap. Therefore the
two images have to be registered so that the mapping
between the pixels in the ToF image and in the RGB
image can be established. The depth map provided by
the ToF camera is sparse and affected by errors. Sev-
eral methods can be used to improve the resolution of
the depth images (Diebel and Thrun, 2005; Kim et al.,
2009; Yang et al., 2007; Kim et al., 2011) allowing
the estimation of a dense depth image. We will use a
simple approach based on linear interpolation.
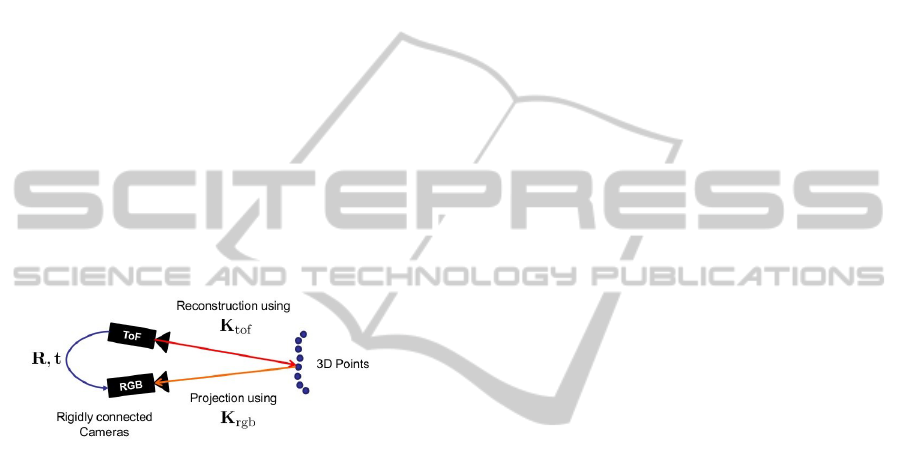
Figure 1: RGB/ToF camera setup.
To estimate depth for all the pixels of the RGB im-
age, based on the depth provided by the ToF camera,
a simple linear approach is used. We assume that the
relative pose between both cameras, specified by the
rotation matrix R
0
and translation vector t
0
has been
estimated. We also assume that both cameras are in-
ternally calibrated, i.e., their intrinsic parameters are
known. Let p
to f
and p
rgb
represent the 3D coordinates
of a 3D point in the coordinate system of the Tof and
RGB cameras, respectively.
We use a pinhole camera model for both the RGB and
ToF cameras. Assume that the relative pose of the
RGB camera and ToF sensor is fixed with a rotation
R
0
and a translation t
0
: p
rgb
= R
0
p
to f
+ t
0
as shown
in Figure 1. The point cloud p
to f
is obtained directly
from the calibrated ToF camera. Since the relative
pose is known as well as the intrinsic parameters for
both cameras, p
rgb
can be obtained from p
to f
. To es-
timate depth for all points of the RGB image, a sim-
ple linear interpolation procedure is used. For each
2D point of the RGB image, we select the 4 closest
neighbors whose depth was obtained from the depth
image. Then, a bilinear interpolation is performed.
Another possibility would be to select the 3 clos-
est neighboring points (therefore, defining a triangle)
and assume that the corresponding 3D points define a
plane. An estimate for the depth of the point could
then be obtained by intersecting its projecting ray
with the 3D plane defined by the three 3D points.
3.2 Recovery of the Mesh Depth
Given a sparse set of 3D feature points p
re f
=
n
p
re f
1
, ·· · ,
p
re f
N
o
on a reference template with
a known shape (usually a flat surface), and a set of 2D
image points q =
q
1
, ·· · ,
q
N
}
tracked on the
RGB input image of the same surface but with a dif-
ferent and unknown deformation. As already stated,
we represent the surface as a triangulated 3D mesh
with n
v
vertices v
i
(and n
tr
triangles) concatenated in
a vector s =
v
T
1
, ·· · , v
T
n
v
T
, and denote by s
re f
the reference mesh, and s the mesh we seek to recover.
Let p
i
be a feature point on the mesh s corresponding
to the point p
re f
i
in the reference configuration. We
can express p
i
in terms of the barycentric coordinates
of the triangle it belongs to:
p
i
=
3
∑
j=1
a
i j
v
[i]
j
(1)
where the a
i j
are the barycentric coordinates and
v
[i]
j
are the vertices of the triangle containing the
point p
i
. Since we are dealing with rigid trian-
gles, these barycentric coordinates remain constant
for each point and can be easily computed from
points p
re f
i
and the mesh s
re f
. Let us denote by
A =
a
1
, ·· · , a
N
the set of barycentric co-
ordinates associated to the 3D feature points, where
a
i
=
a
i1
, a
i2
, a
i3
. The rigidity of a triangle
enforces that the sum of the relative depths around
a closed triangle be zero. Assuming that the depth
of the vertices of a triangle is denoted as v
z,1
, v
z,2
and v
z,3
, we have: (v
z,1
− v
z,2
) + (v
z,2
− v
z,3
) + (v
z,3
−
v
z,1
) = 0. Substituting (v
z,1
− v
z,2
) , (v
z,2
− v
z,3
)
and (v
z,3
− v
z,1
) for rz
1
, rz
2
and rz
3
, respectively,
which denote the relative depth of the edges of the
triangle, we can represent the above equation differ-
ently as: rz
1
+ rz
2
+ rz
3
= 0 where rz
1
= v
z,1
− v
z,2
,
rz
2
= v
z,2
− v
z,3
, and rz
3
= v
z,3
− v
z,1
. Having the
above equations for any triangle of the mesh makes a
total of n
tr
+ n
e
(the number of triangles + the num-
ber of edges) linear equations which can be jointly
expressed as M
1
(n
tr
+n
e
)×(n
v
+n
e
)
x
1
(n
v
+n
e
)×1
= 0. This ho-
mogeneous system of equations must be satisfied at
each time instant (i.e. for any deformation). How-
ever, finding a unique solution is not possible. More
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
546

specifically, M
1
is rank-deficient by n
v
, that is, it
does not have n
v
+ n
e
linearly independent columns (
rank(M
1
) = n
e
). So, there will be a n
v
-dimensional
basis for the solution space to M
1
x
1
= 0. Any so-
lution is a linear combination of basis vectors. In
order to constrain the solution space and determine
just one solution out of the infinite possibilities, in a
way that this linear system matches only one particu-
lar deformation, it is necessary to add n
v
independent
equations. To add additional constraints, we augment
this system with the z coordinate of few properly dis-
tributed feature points in this arrangement: using the
method described in the previous section, we can ob-
tain an estimate for the depth of a feature point i, in-
dicated by p
z, j
. From the Equation 1, we can derive
p
z,i
= a
i1
v
[i]
z,1
+ a
i2
v
[i]
z,2
+ a
i3
v
[i]
z,3
.
This non-homogeneous system of equations can be
represented as M
2
N×n
v
x
2
n
v
×1
= p
z
. It can be verified
that x
1
=
rz
x
2
. rz is a n
e
-vector of the rela-
tive depth of the edges. Having the above equation
for any feature point results in N linear independent
equations. Putting together both sets of equations just
explained, we end up with n
tot
= n
tr
+ n
e
+ N lin-
ear equations ( Mx
1
=
0
p
z
) where the only un-
knowns are the depth of the vertices and of the edges
(i.e. n
v
+ n
e
unknowns), which means that the re-
sulting linear system is overdetermined. In fact, we
obtain n
e
+N independent equations out of n
tot
equa-
tions. Yet, this is not enough to find the right single
solution because there are still an infinitude of fur-
ther solutions that minimize
Mx
1
−
0
p
z
in the
least-squares sense. One possible approach after the
3D coordinates are estimated is to fit an initial sur-
face using cubic spline data interpolation, to the data
which consists in xy-coordinates of the feature points
on the reference configuration as input and their z-
coordinates on the input deformation as output. Once
the parameters of the interpolant have been found, we
can obtain initial estimates of depth for the vertices,
with their xy-coordinates on the reference configura-
tion as input. The interpolated depth has proved to be
very close to the correct one. Then, we add an equal-
ity constraint for each vertex as I
nv×nv
x
2
= v
0
z
( v
0
z
is
the interpolated depth of the vertices). The new lin-
ear system M
new
x
1
= b has most likely full column-
rank. So, the number of independent equations out of
n
tot
+ n
v
equations would be n
e
+ n
v
. Since the num-
ber of independent equations is equal to the number of
unknowns, there must be a unique solution, which can
be computed via the normal equations. In principle,
finding the least-sqaures estimate is recommended.
4 GLOBAL METRIC
ESTIMATION OF STRUCTURE
AND MOTION
Next we describe two non-linear constraints applied
to the estimation problem. These two constraints are
used to solve for SfM so that metric reconstruction
of the shape is achieved and the motion matrices lie
on the appropriate motion manifold. Furthermore,
when there are too few correspondences without addi-
tional knowledge (as is the case here), shape recovery
would not be effective. So, we need to limit the space
of possible shapes by applying a deformation model.
This model adequately fills in the missing informa-
tion while being flexible enough to allow reconstruc-
tion of complex deformations (Salzmann et al., 2007).
We assume we can model the mesh deformation as a
linear combination of a mean shape s
0
and n
m
basis
shapes (deformation modes) S = [s
1
,...,s
n
m
]:
s = s
0
+
n
m
∑
k=1
w
k
s
k
= s
0
+ Sw (2)
4.1 Constraint 1: Projected Length
Assume that the RGB camera motion relative to the
world coordinate system is expressed as a rotation
matrix R and a translation vector t. A common ap-
proach to solve for the camera motion and surface
structure is to minimize the image re-projection er-
ror, namely by bundle adjustment. The cost function
being minimized is the geometric distance between
the image points and the re-projected points. How-
ever, we are going to adapt bundle adjustment to our
own problem rather than use it directly, as follows:
the errors to be minimized will be the difference be-
tween the observed and predicted projected lengths of
an edge.
Orthographic Camera: Under orthographic pro-
jection, if we assume that the mesh vertices are regis-
tered with respect to the image centroid, we can drop
the translation vector. The modified formulation of
bundle adjustment can be specified as the following
non-linear constraint:
e
pl
=
n
e
∑
i=1
l
i
−
R
(1:2)
h
s
[i]
1
− s
[i]
2
i
2
(3)
where the leftmost term is the measurement (observa-
tion) of the projected length of an edge.(the compu-
tation of l
i
is trivial with the help of estimated mesh
depth) n
e
is the number of edges. s
[i]
1
and s
[i]
2
denote
2 entries of the mesh, which account for the ending
StructurefromMotion-ToF-aided3DReconstructionofIsometricSurfaces
547

vertices of the edge i. e
pl
can be also expressed as a
quadratic function.
Perspective Camera: In this case, we formulate a
non-linear constraint based on what we call ”unnor-
malized projected length”, as:
e
pl
=
n
e
∑
i=1
l
i
−
K
◦
rgb
[R|t]
s
[i]
1
1
−
s
[i]
2
1
2
(4)
where K
◦
rgb
is a known calibration matrix equivalent
to
f 0 0
0 f 0
0 0 1
. From the estimated mesh depth, l
i
can be easily measured using simple mathematical
manipulation. Since there is a subtraction in the above
cost function, the translation vector t can be removed.
Also, note that the 2-norm is applied to the first 2 en-
tries of a 3-vector to estimate the square of unnormal-
ized projected length. So, only the 2 first rows of the
product of K
◦
rgb
.R are involved in the constraint:
e
pl
=
n
e
∑
i=1
l
i
−
f
[i]
(R
(1:2)
,w)
2
(5)
4.2 Constraint 2: Reprojection Error
Several difficulties may affect the estimation of the
depths namely:
Errors due to the depth interpolation;
Irregular distribution of the feature points over the
object surface.
As a result of these factors, the depth estimate for the
mesh vertices may be significantly inaccurate. In ad-
dition, there are also reprojection errors, that is, er-
rors on the image positions of the 3D feature points.
We should thus account for the reprojection error by
adding a term to the function to be optimized. By
combining Equations 1 and 2, we’ll have:
p
i
=
3
∑
j=1
a
i j
(s
[i]
0 j
+ S
[i]
j
w) (6)
where s
[i]
0 j
and S
[i]
j
are the subvector of s
0
and the sub-
matrix of S (respectively), corresponding to the vertex
j of the triangle in which the feature point i resides.
The term corresponding to the reprojection error can
be obtained as indicated below.
Orthographic Camera:
e
ba
=
N
∑
i=1
q
i
− R
(1:2)
p
i
2
(7)
Perspective Camera:
e
ba
=
N
∑
i=1
λ
i
q
i
1
−
K
◦
rgb
[R|t]
p
i
1
2
(8)
The projective depths λ
i
can be determined using
the estimated depth for feature’s image points on the
RGB image. Subsequently, errors in λ
i
(induced by
the first condition mentioned above) would introduce
false search directions in the e
re
-based minimization
problem. Therefore, it is advantageous to reformulate
the above equations so that λ
i
is removed from them.
So, we take into account the equation below:
λ
i
q
i
1
= K
◦
rgb
"
3
∑
j=1
a
i j
R.v
[i]
j
#
+ K
◦
rgb
.t (9)
After some simple algebraic manipulation and replac-
ing the vertices with the linear deformation mode, we
obtain:
a
i1
A
i
a
i2
A
i
a
i3
A
i
2×9
R.s
[i]
1
R.s
[i]
2
R.s
[i]
3
9×1
+A
i
.t =
"
g1
[i]
(R,w,t)
g2
[i]
(R,w,t)
#
2×1
= 0 where A
i
= K
◦(1:2)
rgb
− q
i
.K
◦(3)
rgb
(10)
This equation provides 2 linear constraints as: g1
[i]
(.) = 0
and g2
[i]
(.) = 0. Thus, the modified e
re
takes a form free
of λ
i
as follows: e
mre
=
∑
N
i=1
g1
[i]
(.)
2
+ g2
[i]
(.)
2
, where e
mre
denotes the modified e
re
. e
pl
is a function of R
(1:2)
and w whereas e
mre
(or e
re
) is a function of R, w and
t. In order to simplify e
pl
, we modify it by consid-
ering that: 1- the translation vector t is fixed and the
camera setup has only rotational movement relative to
the world coordinate system. 2- adding the following
function to f
[i]
(R
(1:2)
,w) in the first constraint, we are
able to solve for the full matrix R:
f
[i]
rz
(R
(3)
,w) =
R
(3)
h
s
[i]
1
− s
[i]
2
i
(11)
e
rz
= rz
i
− f
[i]
rz
(R
(3)
,w) (12)
where rz
i
= v
[i]
z,1
− v
[i]
z,2
. e
rz
is actually the difference
between the observed and predicted relative depths of
edge i. Combining f
[i]
(.) and f
[i]
rz
(.), it yields:
e
mpl
=
n
e
∑
i=1
q
l
2
i
+ rz
2
i
−
"
f
[i]
(R
(1:2)
,w)
f
[i]
rz
(R
(3)
,w)
#
!
2
(13)
where e
mpl
represents a modified version of e
pl
. As a
result, we brought e
mpl
and e
mre
into a common form
where both are functions of R and w.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
548
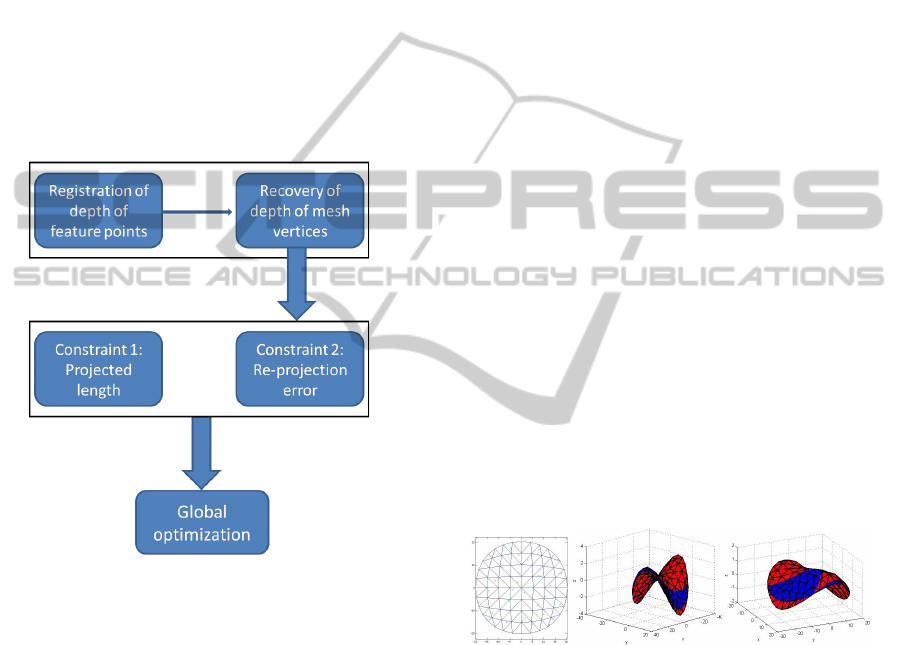
4.3 Objective Function
So far, we have derived two constraints expressed as
two separate non-linear problems. However, we in-
tend to integrate both constraints into one single ob-
jective function so that they are taken into account at
once, when estimating all the parameters. To do so,
we minimize the weighted summation of them in such
a way that the reprojection error term is assigned a
weight m that accounts for its relative influence within
the combined objective function. A block diagram of
the overall structure of the approach is demonstrated
in Figure 2. In our global optimization, we first con-
sider a simplified formulation of the objective func-
tion by excluding the camera motion [R|t]. We in-
clude it back in the second case.
Figure 2: Representation of the approach via block diagram.
4.3.1 Estimation of Structure Only
The constraints are simplified so that the only un-
known parameter is the structure (we assume that the
camera motion is set to [I|0]).
Orthographic Camera: min
w
e
tot
=
e
pl
+ m.e
re
Perspective Camera: min
w
e
tot
=
e
mpl
+ m.e
mre
4.3.2 Estimation of Both Structure and Camera
Motion
We consider now the full optimization by including
the camera motion.
Orthographic Camera: min
R
(1:2)
,w
e
tot
=
e
pl
+ m.e
re
Perspective Camera: min
R,w
e
tot
=
e
mpl
+ m.e
mre
The above optimization problems can be solved us-
ing a non-linear minimization algorithm such as
Levenberg-Marquardt (LMA). The rotation estimates
obtained from this optimization may not satisfy the
orthormality constraints. So, the optimization algo-
rithm must be fed with a good initialization. To pro-
vide initial estimates relatively close to the true ones,
we do the following: if initial guesses for R
(1:2)
and
R are not given, they can be initialized using well-
known methods that attempt to solve for SfM through
non-rigid factorization of
q
i j
and
λ
i j
q
i j
from all
frames, for instance, as in (Llado et al., 2005). In
these methods, the factorization is followed by a re-
finement step to upgrade the reconstruction to metric.
The deformation coefficients w
k
are initialised to ran-
dom small values. One possible solution to further
meet the rotation constraints is to subsequently apply
Procrustes (Akhter et al., 2009; Xiao et al., 2004).
4.4 Additional Constraint
Non-linear optimization may converge to local min-
ima. The probability of such occurrence can be re-
duced by adding a new regularization term that re-
quires the estimated depth data to be as close to the
measured one as possible. So, we would have:
e
z
=
n
v
∑
i=1
v
[i]
z
−
R
(3)
s
[i]
+ t
(3)
2
(14)
where v
[i]
z
is the depth of the vertex i, already recov-
ered and s
[i]
is the 3D position corresponding to the
vertex i. Notice that this regularization is very depen-
dent on the accuracy of v
[i]
z
.
Figure 3: Left: A 9 × 9 template mesh with sparse feature
points - Radius = 20 cm. Right: Metric coordinates in cm
- Overlap between the ground-truth shapes (blue) and the
recovered ones (red).
5 EXPERIMENTS
5.1 Synthetic Data
Next, we evaluate the methods described above using
synthetic data. We synthetized a number of frames
of a deforming circle-like paper (radius = 20 cm) ap-
proximated by a 9 × 9 mesh such as the one shown
in Figure 2. The reason to use a circular mesh is that
it is uniform and has a symmetric shape. Therefore,
StructurefromMotion-ToF-aided3DReconstructionofIsometricSurfaces
549
it has similar shapes (up to a rotation) for a number
of different deformations, which, in fact, brings more
complexity to the reconstruction of the right deforma-
tion. The inextensible meshes used for training have
been built using Blender and PCA was then applied
to estimate the deformation model. In order to gen-
erate the input data, we get a sparse set of 3D feature
points (N = 32) well-distributed on the surface of a
reference planar mesh. The camera configuration is
set up in a way that makes the FOV of the ToF cam-
era be part of the FOV of the 2D camera. The exper-
iments are repeated equally for both the orthographic
and perspective cameras. For the perspective case, the
camera model is defined such that the focal length is
f = 500 pixels. The model assumes that the surface is
located 50 cm in front of the cameras (along the opti-
cal axis). The 3D feature points across the surface are
then projected onto the 2D camera and a zero-mean
Gaussian noise with 1-pixel standard deviation (Std)
was then added to these projections. The depth data of
feature points is also generated by adding a zero-mean
Gaussian noise with 0.1 − cm Std. The results of the
quantitative assessment represent an average obtained
from five deformations randomly selected. By per-
forming 50 trials for each deformation, each average
value was acquired from 250 trials. Two of the esti-
mated deformations and their equivalent ground-truth
are qualitatively illustrated in Figure 3.
Table 1: Preliminary results.
Reconstruction error PRE MRE RotationAccuracy
Our approach - Orthographic 0.0608 0.0755 0.002
Our approach - Perspective 0.0603 0.0751 < 1
◦
5.1.1 Reconstruction Error
The accuracy of the method is reported in terms of
reconstruction errors. The reconstruction errors are
computed with respect to two measures as:
1- Point reconstruction error (PRE): The normal-
ized Euclidean distance between the observed (
ˆ
p
i
)
and estimated (p
i
) world points according to PRE =
1
N
∑
N
i=1
h
k
p
i
−
ˆ
p
i
k
2
/
k
ˆ
p
i
k
2
i
.
2- Mesh reconstruction error (MRE): The normal-
ized Euclidean distance between the observed (
ˆ
v
i
) and
estimated (v
i
) mesh vertices, which is computed as
MRE =
1
n
v
∑
n
v
i=1
h
k
v
i
−
ˆ
v
i
k
2
/
k
ˆ
v
i
k
2
i
.
The reprojection error of the feature points can be also
regarded as another measure of precision. The accu-
racy of the Stiefel rotation matrix is evaluated based
on the orthonormality constraint as RotationAccuracy =
R
(2×3)
R
(2×3)T
− I
(2×2)
2
F
. In case of the perspective cam-
era, we compare the axis-angle of the recovered and
ground-truth rotations as RotationAccuracy =
angle −
ˆ
angle
2
.
The quantitative output can be seen in Table 1. Our
approach takes into consideration just few feature
points, though we take advantage of the ToF sensor
to get the depth of them. We have to notice that the
pattern of placement of these points on the surface is
of high importance and we need to examine which
patterns would yield the best results.
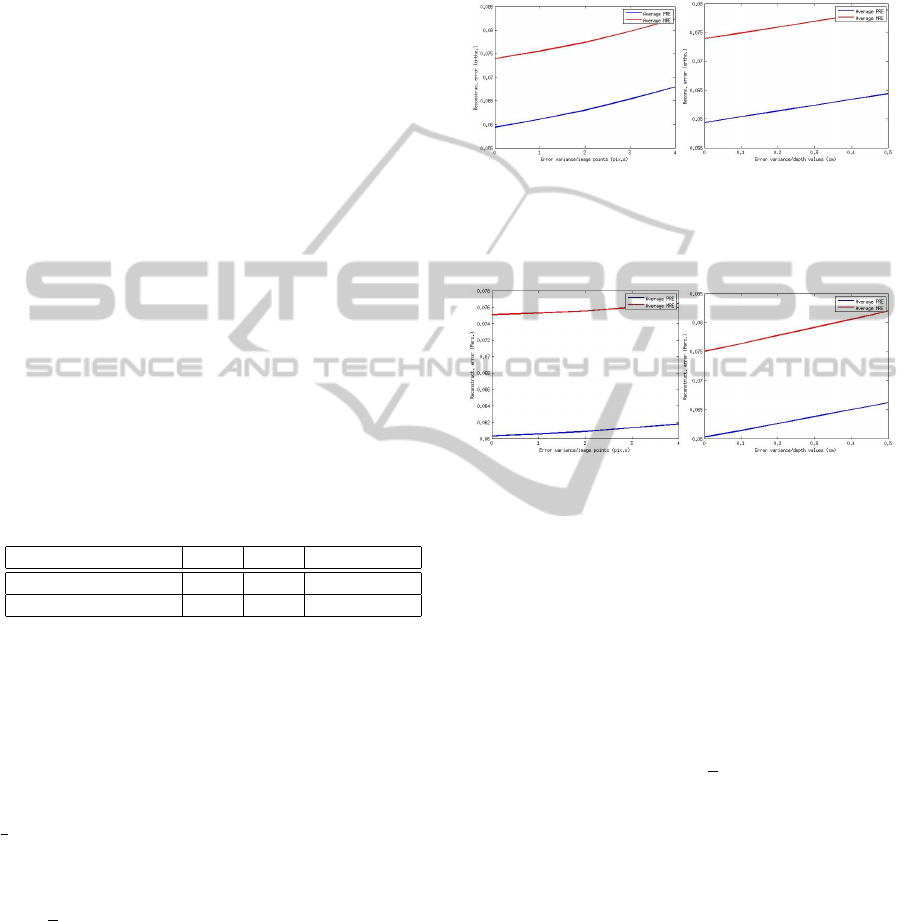
Figure 4: Orthographic camera - Left: Average PRE and
average MRE with respect to the increasing noise in image
points. Right: Average PRE and average MRE with respect
to the increasing noise in depth data.
Figure 5: Perspective camera - Left: Average PRE and av-
erage MRE with respect to the increasing noise in image
points. Right: Average PRE and average MRE with respect
to the increasing noise in depth data.
5.1.2 Length of the Edges
When a 3D surface is reconstructed in a truly inexten-
sible way, the length of the recovered edges must be
the same as that of the template edges. So, in order to
see to what extent the lengths remain the same along
the deformation path, we specify a metric to figure
out the discrepancy between the initial and recovered
lengths as: IsometryExtent =
1 −
1
n
e
∑
n
e
i=1
L
i
−
ˆ
L
i
/
ˆ
L
i
× 100%
which has been found to be 95.77% for the proposed
method, which indicates that it preserves the length of
the edges greatly, confirming that isometry constraint
is satisfied to a large degree.
5.1.3 The Impact of Noise
Different levels of noise (whether in image points or
in depth data) have been simulated to demonstrate
how robustly the approach reacts to the noise. Each
of these 2 types of noise has been investigated sepa-
rately. Figures 4 and 5 illustrate results for increas-
ing levels of Gaussian noise in feature’s image points,
where the Std varied from 0 to 4 pixels with 1-pixel
increments, together with the reconstruction error for
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
550
various levels of Gaussian noise in depth of feature
points, with 0.1 − cm increments of Std, which was
computed following the remark that, since the depth
variation of the surface itself is small, the deviations
from the true depth of every 3D point may be very
close together, varying at each trial according to a
Gaussian distribution. From the Figures 4 and 5, we
may draw the conclusion that the white noise does not
make a dramatic impact on the output, ensuring that
the performance remains pretty stable and the algo-
rithm carries on efficiently in the face of noise.
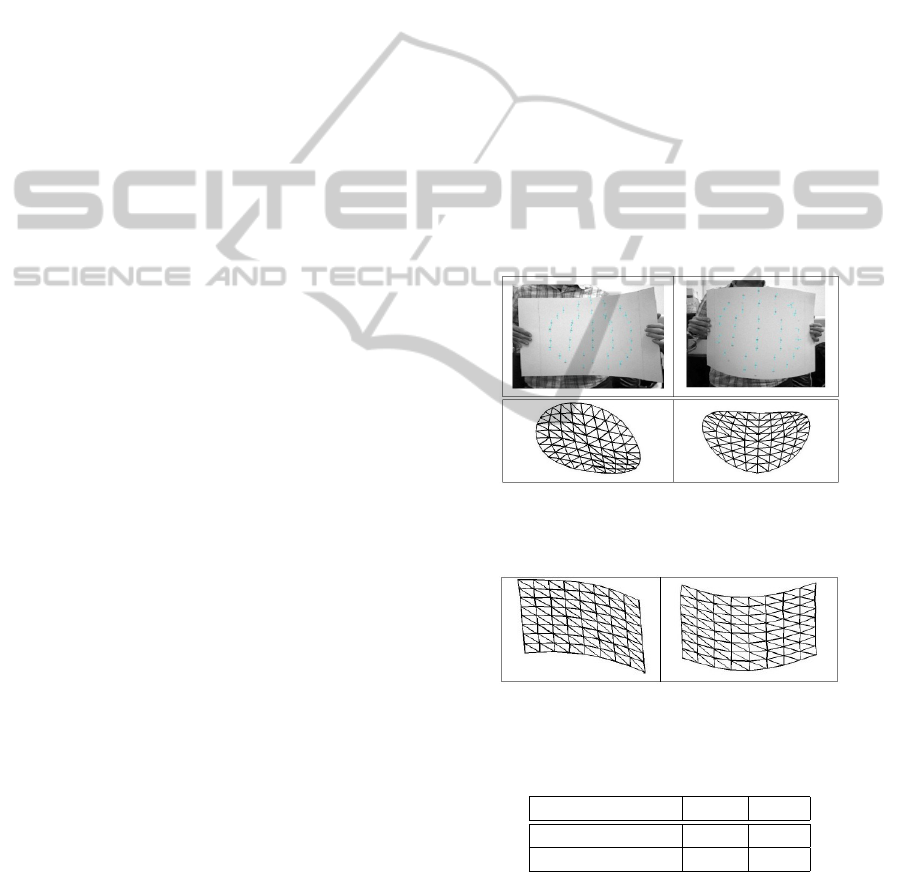
5.2 Real Data
We performed also experiments with real data
recorded using a camera setup comprising a ToF cam-
era and a RGB camera. The camera setup was cali-
brated both internally and externally. Bilinear inter-
polation was applied to estimate the depth of each 2D
point track. We used a piece of cardboard to make
real inextensible deformations and proceeded with the
tracking and matching of few feature points with re-
spect to the reference template using SIFT local fea-
ture descriptor. The same deformation model as the
one acquired in synthetic experiments was employed.
Some deformations and their recovered shapes are
shown in Figure 7. Although it was not possible to
quantitatively assess the results and do benchmark-
ing, the efficiency of the approach was visible from
the 3D reconstruction output.
5.2.1 Comparative Evaluations using Motion
Capture Data
Rather than generate the training data synthetically
using Blender, we take advantage of datasets recorded
using Vicon which is able to capture real deforma-
tions accurately. Since the synthetically deformed
meshes might not exactly overlap the real deforma-
tions, we rebuilt the deformation model based on this
real data and redid the experiments. The template
configuration is now composed of equal triangles and
covers a 20 × 20-cm square-like area. As an exam-
ple, the reconstructed surfaces in Figure 7 look bet-
ter than the ones in Figure 6. Consequently, when
learned with real data, the deformation model would
be more robust to the deformations.
As a general rule, two different entities can be com-
pared only when they meet identical conditions which
characterize them. To this end we analyzed the state-
of-art literature and selected the approach described
in (Salzmann et al., 2007). In particular this approach
also uses a triangular mesh and can use the same types
of data sets required by our approach. As a result, to
show how the real training data will influence the 3D
reconstruction, we performed a set of simulations as
we already did with Blender data and we compare the
performance of our SfM framework to this approach
(where the authors use a second-order cone program
(SOCP) to accomplish the 3D reconstruction of inex-
tensible surfaces). Their approach is known to be very
robust and efficient, where a linear local deformation
model integrates local patches into a global surface
and requires many feature points distributed through-
out the surface. To account for noise in our approach,
like before, a Gaussian noise with 1-pixel Std was
added to the image points and a Gaussian noise with
0.1 − cm Std to the depth data. The SOCP-based ap-
proach was evaluated without noise. We obtained the
results for 5 deformations after having done 50 trials
for each one. From the Table 2, it can be seen that
the result of our approach is comparable to that of the
SOCP-based method. The reconstruction errors are
considerably lower than those in table 1, which may
imply that the use of good-quality real data for train-
ing might improve significantly the results.
Figure 6: Real deformations; A 20 × 20-cm square was se-
lected from the intermediate part of the cardboard and the
corresponding circle was reconstructed.
Figure 7: The reconstructed shape of the corresponding
squares in Figure 6.
Table 2: Comparison between the proposed approach and
the SOCP-based one.
Reconstruction error PRE MRE
Our approach 0.0120 0.0185
SOCP-based approach 0.0162 0.0217
6 CONCLUSIONS
In this paper, we have proposed a SfM framework
combining a monocular camera and a ToF sensor to
StructurefromMotion-ToF-aided3DReconstructionofIsometricSurfaces
551

reconstruct surfaces which deform isometrically. The
ToF camera was used to provide us with the depth of
a sparse set of feature points, from which we can re-
cover the depth of the mesh using a multivariate linear
system. The key advantage of the RGB/ToF system is
to benefit from the high-resolution RGB data in com-
bination with the low-resolution depth information.
We proposed an approach to inextensible surface re-
construction, which is formulated as an optimization
problem. Finally, we carried out a set of experiments
showing that the approach generates good results in
cases where 3D points are well-distributed. As next
objective, we will extend the approach to deal with
non-rigid surfaces which are not isometric e.g. con-
formal surfaces and etc.
REFERENCES
Aans, H. and Kahl, F. (2002). Estimation of deformable
structure and motion. Workshop on Vision and Mod-
elling of Dynamic Scenes, ECCV, Denmark.
Akhter, I., Sheikh, Y., and Khan, S. (2009). In defense of
orthonormality constraints for nonrigid structure from
motion. pages 1534–1541. CVPR.
Dai, Y., Li, H., and He, M. (2012). A simple prior-free
method for non-rigid structure-from-motion factoriza-
tion. pages 2018–2025. CVPR.
Del-Bue, A., Llad, X., and Agapito, L. (2006). Non-rigid
metric shape and motion recovery from uncalibrated
images using priors. IEEE Conference on Computer
Vision and Pattern Recognition, New York.
Diebel, J. and Thrun, S. (2005). An application of markov
random fields to range sensing. Proc. NIPS.
Gay-Bellile, V., Perriollat, M., Bartoli, A., and Sayd, P.
(2006). Image registration by combining thin-plate
splines with a 3d morphable model. International
Conference on Image Processing.
Gumerov, N., Zandifar, A., Duraiswami, R., and Davis, L.
(2004). Structure of applicable surfaces from single
views. European Conference on Computer Vision.
Kim, H., Tai, Y.-W., and Brown, M. (2011). High quality
depth map upsampling for 3d-tof cameras. pages 1623
– 1630. Inso Kweon Computer Vision (ICCV), IEEE
International Conference, Barcelona.
Kim, Y., Theobalt, C., Diebel, J., Kosecka, J., Miscusik, B.,
and Thrun, S. (2009). Multi-view image and tof sensor
fusion for dense 3d reconstruction. pages 1542–1549.
Computer Vision Workshops (ICCV Workshops).
Llado, X., Bue, A., and Agapito, L. (2005). Non-rigid 3d
factorization for projective reconstruction. BMVC.
Metaxas, D. and Terzopoulos, D. (1993). Constrained de-
formable superquadrics and nonrigid motion tracking.
PAMI 15, pages 580–591.
Paladini, M., Bue, A., Stosic, M., Dodig, M., Xavier, J., and
Agapito, L. (2009). Factorization for non-rigid and
articulated structure using metric projections. page
28982905. Proc. IEEE Conf. on Computer Vision and
Pattern Recognition.
Perriollat, M., Hartley, R., and Bartoli (2010). Monocu-
lar template-based reconstruction of inextensible sur-
faces. International Journal of Computer Vision.
Prasad, M., Zisserman, A., and Fitzgibbon, A. (2006). Sin-
gle view reconstruction of curved surfaces. pages
1345–1354. IEEE Conference on Computer Vision
and Pattern Recognition.
Salzmann, M. and Fua, P. (2007). Reconstructing sharply
folding surfaces: A convex formulation. IEEE Con-
ference on Computer Vision and Pattern Recognition.
Salzmann, M., Hartley, R., and Fua, P. (2007). Convex op-
timization for deformable surface 3-d tracking. IEEE
International Conference on Computer Vision.
Salzmann, M., Moreno-Noguer, F., Lepetit, V., and Fua, P.
(2008). Closed-form solution to non-rigid 3d surface
registration. pages 581–594. European Conference on
Computer Vision.
Shen, S., Shi, W., and Liu, Y. (2010). Monocular 3-d
tracking of inextensible deformable surfaces under l2-
norm. IEEE Transactions on Image Processing 19,
pages 512–521.
Srivastava, S., Saxena, A., Theobalt, C., and Thrun, S.
(2009). Rapid interactive 3d reconstruction from a
single image. In VMV, pages 19–28.
Torresani, L., Hertzmann, A., and Bregler, C. (2003).
Learning non-rigid 3d shape from 2d motion. NIPS,
pages 580–591.
White, R. and Forsyth, D. (2006). Combining cues: Shape
from shading and texture. CVPR.
Xiao, J., x. Chai, J., and Kanade, T. (2004). A closed-
form solution to non-rigid shape and motion recovery.
pages 573–587. ECCV.
Yang, R., Davis, J., and Nister, D. (2007). Spatial-depth su-
per resolution for range images. pages 1–8. Computer
Vision and Pattern Recognition, CVPR ’07. IEEE
Conference, Minneapolis, MN.
Zhou, H., Li, X., and Sadka, A. (2012). Nonrigid structure-
from-motion from 2-d images using markov chain
monte carlo. 14(1):168–177.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
552
