
Toward Pervasive Computing System to Enhance Safety of Ageing
People in Smart Kitchen
Bessam Abdulrazak, Rami Yared, Thomas Tessier and Philippe Mabilleau
University of Sherbrooke, Quebec, Canada
Keywords: Smart Kitchen, Cooking-Safe, Context-Aware, Ageing People, Assistive Technology, Sensor, Risk, Hazard,
Fire, Burn, Intoxication, Activities of Daily Living.
Abstract: Kitchen is the second place where the majority of domestic accidents occur, and in particular oven presents
the most principal source of fire accidents in residence. Therefore, enabling kitchen safety is a major factor
for ageing people independent living. This paper presents the hardware architecture of our cooking-safe
system that targets enhancing safety of ageing people while cooking. The system is based on insightful
cooking risk analysis that enables to determine the pertinent parameters to be monitored and measured while
cooking. This paper also presents the results of our experimental study that leads us to select the appropriate
sensors to constitute the basic building block of our cooking-safe system. The system is composed of sensor
nodes to monitor events around oven, then the sensory data is transmitted to a computing unit. The system
proactively reacts to hazards in order to prevent cooking associated risks.
1 INTRODUCTION
Cooking is a very important Activity of Daily Living
(ADL). Statistical studies revealed that cooking
enhances survival for ageing people, and can
improve their moral feeling as active people (Chen,
2012). Alas, kitchen is the second place where the
majority of domestic accidents occur, and in
particular oven presents the main source of fire
accidents in the residence (Fire Marshal's Public,
2009; Ahrens, 2008). Studies also revealed that
unattended cooking is the main leading factor
responsible for fire in the kitchen (Ahrens, 2008;
Lushaka, 2014). Therefore, enabling kitchen safety
is a major factor for ageing independent living.
The need of providing safety for ageing people at
home becomes more significant because of the
increasing number of ageing people around the
world, and particularly in developed countries. In
Canada, the proportion of ageing people aged 65
years or over will represent between 23% and 25%
of the population by 2036, and between 24% and
28% by 2061 (Martel, 2011; Hall, 2006). In Japan,
the population of 65 year-old was about 25.1% of
the total population in 2013, and will be 40% in
2050, which is the highest ratio of ageing population
in the world (Toshio, 2013). In the United States, the
number of senior citizens is also on the rise: in 2010,
there were 40.3 million people aged 65 and above,
comprising 13% of the overall population. This
proportion is 12 times higher than it was in 1900,
when this group constituted only 4.1% of the
population. By 2050, projections indicate the
population over 65 will comprise 20.9% of the
population in the United States (Loraine, 2014). In
Europe, by 2025 more than 20% of population will
be 65 or over, with a particularly rapid increase in
the number of over 80s. In the United States, 40% of
women and 19% of men aged 65 years and older,
live alone and do not have anyone in the home to
assist with activities of daily living, provide care
when they are sick, or to assist with home
maintenance (Jacobsen, 2011). In Canada, 92.1% of
ageing people live in private households or
dwellings (Canadian Census, 2011).
Cognitive decline in ageing, such as attention
and memory problems, have severe impacts on
ADL, limiting people to perform cooking. Due to
this decline, ageing people are strongly concerned
by cooking associated risks (We identify the three
major risks during cooking/ in kitchen as fire, burn
or intoxication). As consequences, they are often
forced to stop cooking or completely move to a
nursing home or healthcare facility to prevent
dangerous situations (e.g., a fire may occur when an
17
Abdulrazak B., Yared R., Tessier T. and Mabilleau P..
Toward Pervasive Computing System to Enhance Safety of Ageing People in Smart Kitchen.
DOI: 10.5220/0005538900170028
In Proceedings of the 1st International Conference on Information and Communication Technologies for Ageing Well and e-Health (ICT4AgeingWell-
2015), pages 17-28
ISBN: 978-989-758-102-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

ageing person forgets a pot on a burner (Yuan,
2012)). Urgent intervention is required to prevent
risks in ADL, which is driven by the following
motives:
• The vast majority of ageing people live
independently (Gitlin, 2003);
• Most of ageing people wish to remain in their
environment as long as possible (Public Health
agency of Canada, 2006), even if this stay
requires long-term in-home care provision
(Wahl, 2003);
• In addition, about 80% of seniors prefer to die at
home, not at care facilities (Wahl, 2003).
A possible solution for ageing people to stay at
home is to be accompanied by a family member or a
caregiver for cooking activity. However, this
solution is not practical due to independence and
privacy issues. In addition, it has several drawbacks
such as high cost and a shortage of qualified
professionals. It also requires that ageing person
accepts the idea of being not completely autonomous
needing help. These factors negatively affect the
moral situation of ageing people and consequently
complicate the cognitive deficiencies recovery
(Sperling, 2011). Therefore, assistive technology is a
potential alternative to enhance safety at home.
We present in this paper our attempt to provide
ageing people with an assistive technology for safe
cooking environment. Our goal is to establish a
preventive approach for enhancing safety, with a
cooking-safe system that proactively reacts to
hazards in order to prevent cooking associated risks.
We envision a cooking-safe system composed of
sensor nodes that enable monitoring of events
around oven. The sensory data is processed
according to risk prevention algorithms. These
algorithms are based on the results of our
experimental cooking risk analysis. In this paper, we
introduce the hardware architecture of our cooking-
safe system. We mainly discuss the selection of the
sensors that has been inferred from our risk analysis
and experiential studies. We also present the results
of our experimental study including testing sensors
in real word environment.
The rest of the paper is organized as follows.
Section 2 highlights the terminology used in this
paper. Section 3 presents the related existing work.
Section 4 introduces our cooking-safe system.
Section 5 summarizes the results of our risk analysis
and assessment. Section 6 presents the hardware
architecture of our cooking-safe system. In addition,
it discusses the selected sensors that constitute the
basic building block of the system, and sensors
positioning in the cooking environment. Section 7
discusses the results of the sensors testing. Finally,
Section 8 concludes the paper and presents future
work.
2 “RISK” VS. “HAZARD”
There is a need for a clear understanding of the
meaning of terms “Risk” and “Hazard” since they
are generally used interchangeably in the literature.
Risk is defined as “the probability that a negative
consequence (e.g. loss) can occur in a given period
of time following a specific adverse event”
(Marzocchi, 2012). Hazard is defined as “a source of
danger” and risk is the “possibility of loss or injury”
and the “degree of probability of such loss. Hazard,
therefore, simply exists as a source. Risk includes
the likelihood of conversion of that source into
actual delivery of loss, injury, or some form of
damage” (Kaplan, 1981). We distinguish between
risk and hazard. We define Risk as the potential of
occurrence of an event that yields unwanted results,
and we define Hazard as a reason that causes a risk.
As an example, let us consider this scenario for an
elderly person performing ADL. She/he is cooking a
meal, puts a pot on burner and goes to watch TV.
After a period of time, a fire occurs in the kitchen.
The hazard in this example is unattended cooking,
and the risk is fire. Fire occurs and causes unwanted
results such as home destruction, losing valuable
objects, or death of the person.
3 RELATED WORK
We identified the three major risks during cooking/
in kitchen as fire, burn or intoxication. Our study of
the literature reveals that existing research often
addresses only one particular risk in cooking (mainly
fire), and there is no global solution for kitchen
safety. In addition, no research work provides
solutions to prevent burn or intoxication.
A basic existing solution to handle fire risk at
home is installing fire alarms. The main concern of
fire alarms is to detect fire occurrence quickly, so
fire rescue agents can intervene in time. However,
fire alarms have several drawbacks, particularly for
ageing people. These people usually forget replacing
alarm batteries regularly. In addition, fire alarms
generate false alarms (e.g., in the presence of a small
quantity of smock generated by regular cooking).
This situation disturbs them, which increases their
tendency to uninstall fire alarms at their homes.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
18

Lushaka et al. (Lushaka, 2014) established a more
elaborated system that relies on existing smoke
alarms to detect a potential fire risk, and
consequently, reacts by switching off oven power
supply. The system considers only fire risk and
depends on existing smoke alarms.
Doman et al. establish a system for assisting
ageing people in kitchen through video and audio
(Doman, 2011). This system reminds user to follow
the correct steps when performing a cooking task, so
it can possibly avoid cooking hazards, but it does not
react when a dangerous situation occurs. Other
intelligent assistive technologies are designed for
people with cognitive deficiencies: Li et al. (Li,
2013) propose a design for a smart kitchen
environment to assist ageing people suffering from
dementia in cooking process. Using the system,
caregivers remotely instruct users according to a
cooking workflow. In addition, a visual surveillance
system with multiple cameras enables to observe
cooking conditions, and track user activities and
object movement. This system is not completely
automatic, since it requires observer intervention and
it is based on visual monitoring by cameras, which
may be considered intrusive. Sanchez et al. establish
a system that assists people in the kitchen and reacts
when a potentially dangerous situation is detected
(Sanchez, 2013). The system detects rapid variations
in temperature and smoke in kitchen, and sends a
notification (with camera shots) to the fire
department and caregivers. In addition, the system
activates exhaust fans and a fire extinguishing
suppression system. A number of studies mention
oven monitoring as a part of larger systems to track
ADL: Alwan et al., (Alwan, 2006) measure oven
usage and Wai et al., (Wai, 2011) propose detecting
unsafe usage of the oven. Both systems use
embedded temperature sensors to measure the
burner status, ultrasonic sensors to detect the
presence of a pot and electric current sensors to
detect the usage of oven and levels of abnormality in
the kitchen. Chen et al. (Chen, 2010) propose a
system that detects food ingredients based on
visible-light cameras during cooking activities to
ensure the healthy eating habits. The three discussed
systems either require modifications to oven to
install sensors, or use visible-light cameras (may be
considered intrusive). Yuan et al. (Yuan, 2012)
developed an automated top oven monitoring system
based on thermal camera to detect dangerous
situations. The system alerts user or caregiver when
a dangerous situation occurs. The system does not
require modifications to oven, so it fits any existing
oven and respects user privacy, because it is based
on thermal imaging instead of visible-light camera.
Since the thermal camera does not process regular
images, user privacy is preserved. However, the
thermal camera has significant limitations since it is
sensitive to cooking heat and smoke.
Few electrical cooking devices equipped with
limited safety features are available in the market.
For example, Electrolux INSPIRO oven contains
programmable cooking modes. According to the
selected cooking mode, the oven calculates cooking
time and temperature. TMIO society commercializes
ovens with tactile screen, and network connection to
be remotely controlled. Numerous manufactures
integrate LEDs to indicate that an oven surface is hot
to prevent burn. However, the concentration of
ageing people is on the cooking task itself and
she/he may not notice the lightening LED. Generally
speaking, safety measures are partially considered in
the existing commercial cooking devices.
StoveGuard, SafeCook and HomeSensor propose a
timer system to switch off an oven if there is no
attendance after certain programmed time. Still,
risks may occur within this period of time.
To summarize, existing systems propose
numerous interesting features to manage risks at
home. However, they have several limitations: they
focus on aid for only one specific risk situation, they
need to be programmed for each type of use and
each time they are used, and they provide elevated
risks in the case of cognitive deficiencies.
4 COOKING-SAFE SYSTEM
Our proposition to address cooking safety issues for
ageing people independent living is to offer
pervasive computing support. The system is based
on a smart environment infrastructure, especially
sensors and actuators distributed in the kitchen area.
The system allows sensing cooking activities and
offering appropriate interventions.
• Sensors are installed around oven to perform
contextual information acquisition. They allow
the system to infer the situation during cooking,
or detect changes in the surrounding environment
(e.g., smoke, burner temperature, utensil
temperature, and presence of utensil on burner).
• Actuators are distributed in the residence to
ubiquitously alert user of a cooking risk
situation. They provide feedback through
screens, speakers, or flashing lights, and control
appliances in the kitchen (such as switch off
oven power).
TowardPervasiveComputingSystemtoEnhanceSafetyofAgeingPeopleinSmartKitchen
19

Sensory data fusion and ambient intelligence
techniques enable detection of risk situations with
enhanced accuracy and efficiency. Moreover,
actuators provide a wide range of possibilities for
human-machine interaction including appropriate
intervention for each detected risk situation, and an
adapted reaction according to user needs.
Building a robust sensor-based cooking-safe
environment requires insightful risk analysis. In
addition, adequate sensor selection and testing is a
significant factor for building a robust system.
Therefore, we performed experiments on cooking
several kinds of food in normal and risk situations,
in order to extract the relevant parameters to monitor
and measure to prevent cooking related risks
(Section 5). After analyzing risks, we discuss the
sensors selected based on risk analysis to build the
cooking-safe system (Section 6). Then, we illustrate
sensors testing results in order to study the behavior
and precision of sensors in real world cooking
environment (Section 7).
5 RISK ANALYSIS AND
ASSESSMENT
We performed risk analysis and assessment in two
phases. First, we reviewed literature to study the
characteristics of existing solutions. We also
extracted the pertinent parameters of cooking risks.
As results of this phase, we identified the most
frequent hazards that lead to risk situations as
follows:
1. Unattended cooking,
2. Forgetting a pot on a burner;
3. User turning on a burner, but forgetting to cover
it with a pot;
4. User turning on a burner, but placing the pot on
an incorrect burner,
5. Burners are at dangerous temperatures and oven
is left unattended;
6. A pot is removed from oven but user forgets to
turn it off.
This phase also enabled us to identify the major risks
during cooking activities as: fire, burn, and
intoxication.
Second, we built an experimental setup to study
these three major identified risks. We present a
summary of our experimental results (the complete
study with comprehensive results is presented in
another paper).
5.1 Experimental Setup
We investigated several hazardous situations during
cooking in order to extract pertinent parameters
related to cooking risks. We performed series of
experiments that reflect the real world cooking
scenarios with varieties of cooking materials. The
goal is to establish the relation between the
parameters and triggering risks. In order to focus
only on sources of risks, independently from oven
characteristics (e.g., gas factors related to gas oven),
we used an electrical oven. Following are a
summary of the studied parameters for each risk:
Fire: we observed the parameters: Volatile
Organic Compound (VOC), Alcohol, and
CO gases concentrations in the cooking
smoke gas.
Burn: For burn risk by splash and by contacting
hot objects, we observed the following
parameters: relative humidity, utensils
temperatures, burner temperature, and
presence of object over burner.
Intoxication: we observed the concentration of CO
gas in the cooking smoke.
5.2 Fire Risk Analysis
We observed cooking several types of food, i.e.,
fish, meat, onion, peppers, and spaghetti. Also, we
experiment heated oil (i.e., 50ml of canola oil) in a
frying pan for 8 minutes until oil starts to shudder.
As a summary of our results, there is a correlation
between fire triggering and the concentrations of
certain chemical components in the cooking smoke,
so detection of fire would be possible. Our
experimentations lead us to determine the pertinent
parameters to be monitored in order to detect fire
triggering in early stage i.e., VOC (e.g., aldehydes,
alcohols, acids), hydrocarbons, and inflammable
gases. Our experimentations also revealed that there
are boundaries between normal and dangerous
situations during cooking, with respect to the
concentrations of VOC and Alcohol gases in the
cooking smoke, i.e., if Alcohol or VOC
concentration in the cooking smoke exceeds 170
ppm, then there is a potential fire risk situation.
5.3 Burn Risk Analysis
We distinguish two types of burn linked to cooking:
1
st
by direct contact between skin and hot cooking
utensil and burner; and 2
nd
by splash of hot liquid on
skin. As a summary of our results:
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
20

* For burn by direct contact, detecting the
presence of utensil on a burner is required in order to
start monitoring its temperature. If there is no utensil
on burner, monitoring burner temperature is
required. In addition, we found that there are distinct
thresholds between normal and dangerous situations.
* For burn by splash, we experimented heating
liquid using kettle and saucepan with/without lid for
better understanding of the variations of relative
humidity (%RH) while liquid is boiling. As a
summary of our results: A slight increment in %RH
before water simmers, means that there is a release
of small quantity of steam, and indicates that there is
an object heated on burner. In addition, an increment
of 5%RH indicates that water is simmering so the
global water temperature is around 100°C.
Therefore; rapid variations in relative humidity is an
important indicator of water temperature in a
cooking utensil, and consequently a potential splash
burn risk.
As conclusion, it is feasible to prevent splash
burn risk based on measuring relative humidity,
because it does not change significantly unless a
liquid is being heated. In addition, the
experimentations enabled as to identify the pertinent
parameters to be monitored and measured around
oven in order to prevent burn risk. For burn by
contact with hot object, the parameters are:
temperature of cooking utensils, temperature of
burner, and presence of an object on burner. For
burn by splash, the pertinent parameters are: relative
humidity and presence of an object on burner.
5.4 Intoxication by Gas/Smoke Risk
Analysis
Carbon monoxide (CO) is the most dangerous
component in the cooking smoke. It is an odorless,
tasteless, colorless poisoning gas that may cause
death because of its binding to hemoglobin. It is
produced by the incomplete burning of organic
materials. The concentration of CO becomes
immediately dangerous when it reaches 1200 ppm.
Carbon dioxide (CO
2
) is another gas in the cooking
smoke that is less dangerous for health. It becomes
dangerous if the concentration reaches 40,000 ppm.
Our study reveals that CO is released in the
cooking smoke. Combustion of nutritional elements
is either complete (produces Carbon dioxide CO
2
) or
incomplete (produces CO).
As conclusion for the intoxication risk, CO
concentration is a parameter to be monitored around
oven in order to prevent intoxication by gas/smoke.
There are boundaries between normal and
intoxication risk situations. The normal
concentration of CO in the cooking smoke is around
40 ppm. There is a potential intoxication risk, if CO
concentration exceeds 900 ppm.
6 HARDWARE ARCHITECTURE
AND SENSOR SELECTION
Our cooking-safe system is composed of sensor
nodes to monitor events around oven, and transmit
sensory data to a computing unit. The system
proactively reacts to hazards in order to prevent
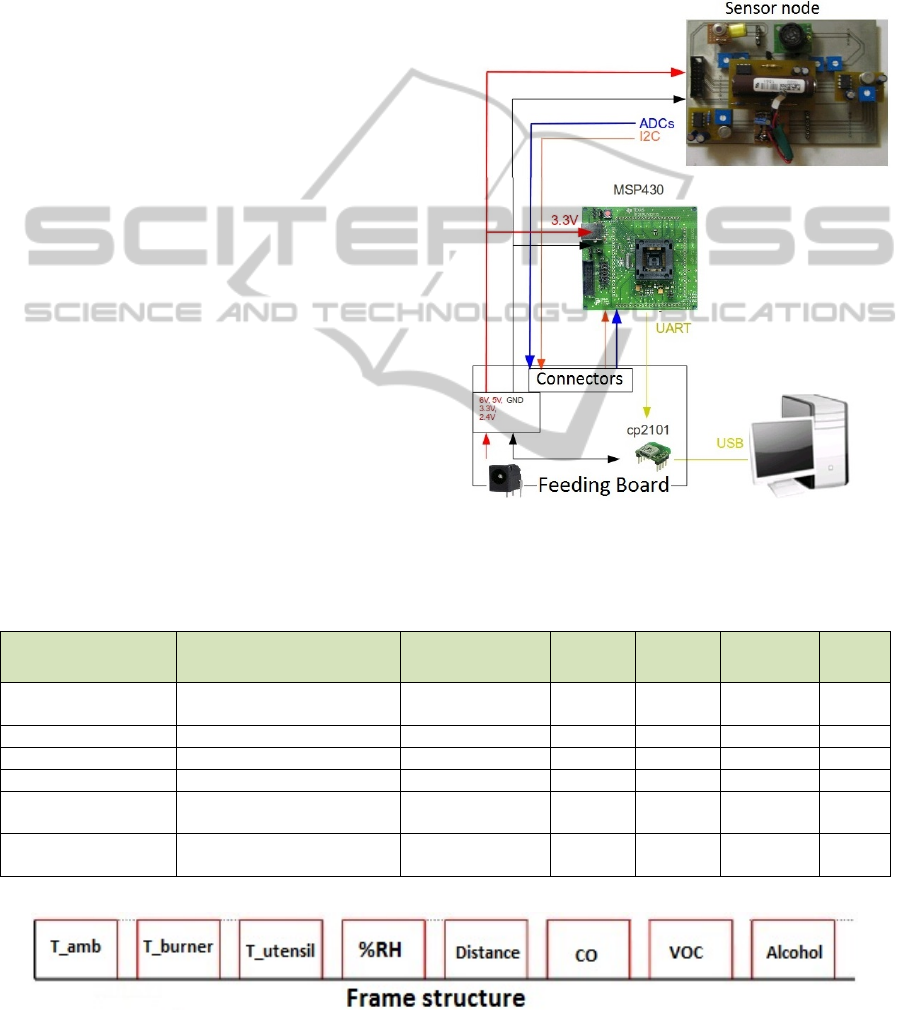
cooking associated risks. Figure 2 illustrates the
hardware architecture of the cooking-safe system
and Figure 1 presents its arrangement in real-world
cooking environment.
Figure 1: Arrangement of the cooking-safe system in the
kitchen.
6.1 Sensor Selection
The selection of sensors is based on the results of
our risk analysis (Section 5). Each sensor is selected
to monitor one of the identified parameters (The
selected sensors are illustrated in Table 1). Our
selection is also based on real-world integration
requirements, which can be summarized as follows:
• Integration requirements: In order to integrate
sensor nodes in the cooking environment,
sensors must be non-intrusive. The selected
sensor technologies (i.e., based on
electrochemical, metal-oxide-semi-conductor,
infrared, ultrasonic, and resistive hygrometer)
do not require contact to operate, and can be
installed around the cooking activity without
interfering with user movement.
• Practicability requirements: Analogue output
signals of the selected sensors are easy to
acquire. For resistive and metal-oxide-semi-
conductor sensors, resistance variations are
TowardPervasiveComputingSystemtoEnhanceSafetyofAgeingPeopleinSmartKitchen
21
translated to voltage. For electrochemical
sensors electric current is transformed into
voltage, which can be easily interfaced with
microcontrollers.
In addition, there are other factors that motivate
our selection of sensors (e.g., price and appropriate
response time).
6.2 Sensor Electrical Feeding
The selected sensors require different electric
feeding voltages, so a “feeding board” is designed to
meet this requirement (illustrated in Figure 2).
Electrical power is taken from the sector through a
transformer, which delivers 12V/1A as output. The
four required electrical voltages (2.4V, 3.3V, 5V,
and 6V) are obtained due to power regulators.
6.3 Microcontroller
The selected microcontroller is MSP430 by Texas
Instruments, because it has the following features:
Analog to Digital Conversion (ADC), multiple
input/output, and two communication ports (UART,
I2C or SPI).
Sensory data is transmitted through cables ADC
(5) and I2C (1), from sensor nodes to MSP430
microcontroller via the feeding board and then from
the MSP430 microcontroller to the computing unit
by one serial frame. The frame is routed to the
computing unit via the cp2101 module, which
converts serial frame to USB frame. The
composition of the frame is illustrated in Figure
3.
Since environment variations are slow, the sampling
period is one second. The frame is composed of the
following attributes: ambient temperature, burner
temperature, utensil temperature, relative humidity,
distance between presence detection sensor and
utensil (used to determine whether utensil is on
burner or not), CO concentration, VOC
concentration, and Alcohol concentration.
Figure 2: Hardware architecture of the cooking-safe
system.
Table 1: Summary of the selected sensors and their technical specifications.
Sensor Monitored information Technology Unit
Operating
voltage
Power
consumption
Response
Time
Melexis MLX 90614
Ambient temperature and
object temperature
Thermopile and
infrared
(°C) V
cc
= 3.3 V 3 mW 100ms
SRF02 Object presence Ultrasonic cm V
cc
= 5 V 72ms
Honeywell H1H1 5030 Humidity Resistive % RH V
cc
= 3.3 V 1.65 mW 5s
Figaro TGS 5042 CO Carbone Monoxide Electro-chemical ppm 60s
Figaro TGS 2620 Alcohol
Metal-Oxide semi-
conductor
ppm
V
h
= V
ref
=
5V
210 mW 20s
e2V MICS 5521
Volatile Organic Compounds
(VOC)
Metal-Oxide semi-
conductor
ppm
V
h
=V
ref
=
3.3V
80 mW 10s
Figure 3: Frame composed of sensory data from MSP430 to computing unit via serial port.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
22
6.4 System Building
The cooking-safe system experimental kit has been
built based on the following properties and features:
• Flexibility: possibility of adding new sensors if
required. The sensor node is designed such that
adding/removing sensors is easily performed.
• Simple physical installation: The sensors are
integrated on a node such that the node can be
placed in an alternative location if required.
However in this case, longer cables and
appropriate sensor direction (for presence
detection sensor (SRF02) and temperature
sensor (MLX90614)) are required.
• Non-intrusiveness: as the oven surface is free
and the components of the system are placed in
adequate positions to monitor hazards and
prevent risk situations. However, for the
experimentation purpose two sensors are placed
in the workspace in addition to the
microcontroller and a computing unit.
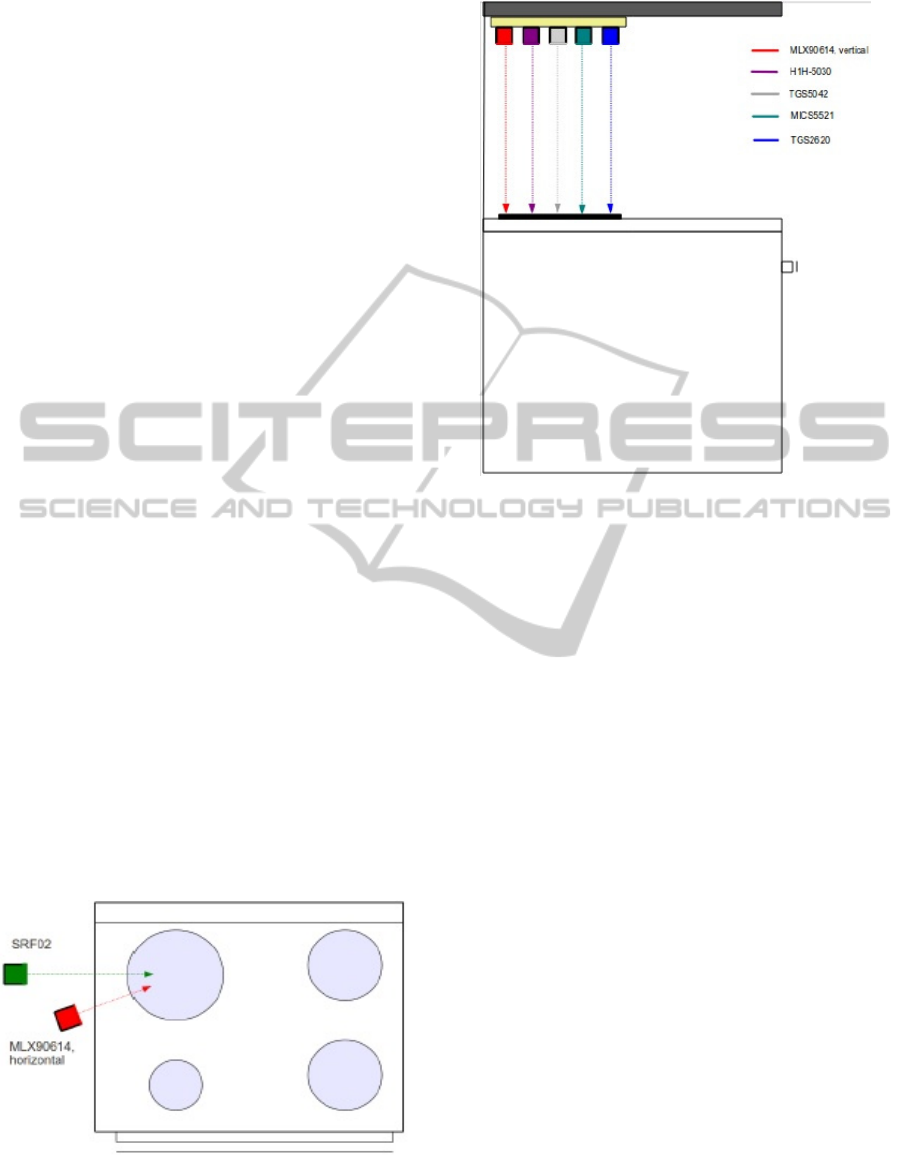
6.5 Sensors Positioning
The output voltage of a sensor varies according to its
position. Therefore, an appropriate sensor
positioning around the oven is required, to acquire
precise sensor measurements and to satisfy the
integration constraints presented in subsection 6.4,
we investigated several configurations and following
is our solution (Figure 4, Figure 5): We placed on
the oven hood level as illustrated in Figure 5 the
following sensors: humidity sensor (H1H-5030),
VOC sensor (MICS5521), Alcohol sensor
(TGS2620), CO sensor (TGS5042), and temperature
sensor (MLX90614) to measure burner temperature.
We placed on the workspace as illustrated in Figure
4 the following sensors: presence detection sensor
Figure 4: Positioning on workspace (20 cm to the left side
of burner) of SRF02 sensor for detecting presence of
utensil on burner and MLX90614 sensor for measuring
utensil temperature.
Figure 5: Positioning of sensors on level of oven hood.
The temperature sensor MLX90614 is to measuring burner
temperature.
(SRF02) for detecting presence of utensil on burner
and temperature sensor (MLX90614) to measure
utensil temperature.
This positioning configuration is non-intrusive as
possible, in order not to disturb user movement and
cooking habits. In addition, positioning sensors at
the level of oven hood allows adequately monitoring
the required parameters.
In addition, the distance between oven hood and
cooking utensils is adequate for acquiring precise
measurements from sensors based on the results of
test for each sensor (Section 7). The motivation
behind positioning SRF02 on workspace for
detecting presence of utensil on burner is that the
distance (20 cm) is appropriate for this sensor
measurements and the positioning on workspace can
avoid cooking heat if it is placed on the level of oven
hood. We placed MLX90614 sensor on workspace
for measuring utensil temperature (20 cm to the left
side of burner) because of the low infrared
emissivity of utensil’s metal which obstructs its
temperature measurment.
7 SYSTEM TESTING
A series of tests has been performed for each
selected sensor. The objective is to investigate the
behavior of each sensor in real world, and thus
TowardPervasiveComputingSystemtoEnhanceSafetyofAgeingPeopleinSmartKitchen
23
determine its limitations. To illustrate the
importance of the test let examine the following
cases. Temperature, humidity, and gases change
frequently around the oven. Furthermore, there is no
single method of cooking in real-world. These
factors may affect sensing data (e.g., putting a small
utensil on a large burner, may affect the
measurements of the presence detection sensor).
Thus, various cooking behaviors have to be
considered to obtain correct and precise
measurements. Measurements of sensors are also
affected by the position and orientation of sensors
(e.g., the temperature sensor does not give the exact
temperature if placed far from the monitored object).
7.1 Test Settings
The first test series was performed using one burner
of the oven, using neither ventilation nor light above
the oven because prior experiments revealed that
sensory date are changing with oven ventilation
and/or light. Utensils used are: saucepan, kettle
(brilliant metal), pan (opaque metal) illustrated in
Figure 6
, for this series of the tests.
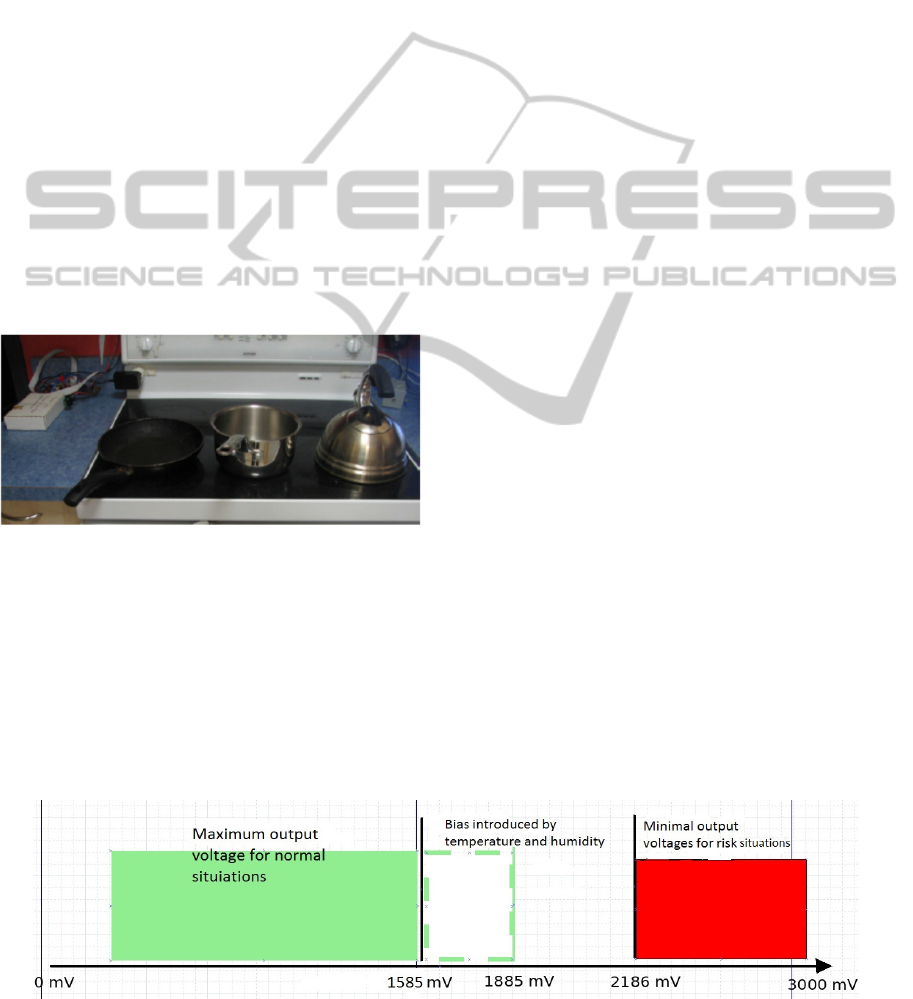
Figure 6: Cooking utensils used for testing sensors.
The saucepan is smaller than the burner in order
to study non-ideal situations. These cooking tools
are selected to study the infrared emissivity between
different metals, and explain different behaviors of
an infrared sensor. We also experiment cooking
several kinds of food: fish, meat, onion, peppers, and
spaghetti. Also, we experiment heated oil (50ml of
canola oil) in a frying pan for 8 minutes until oil
starts to shudder.
7.2 Test Results
Following we present the results of tests performed
on the selected sensors.
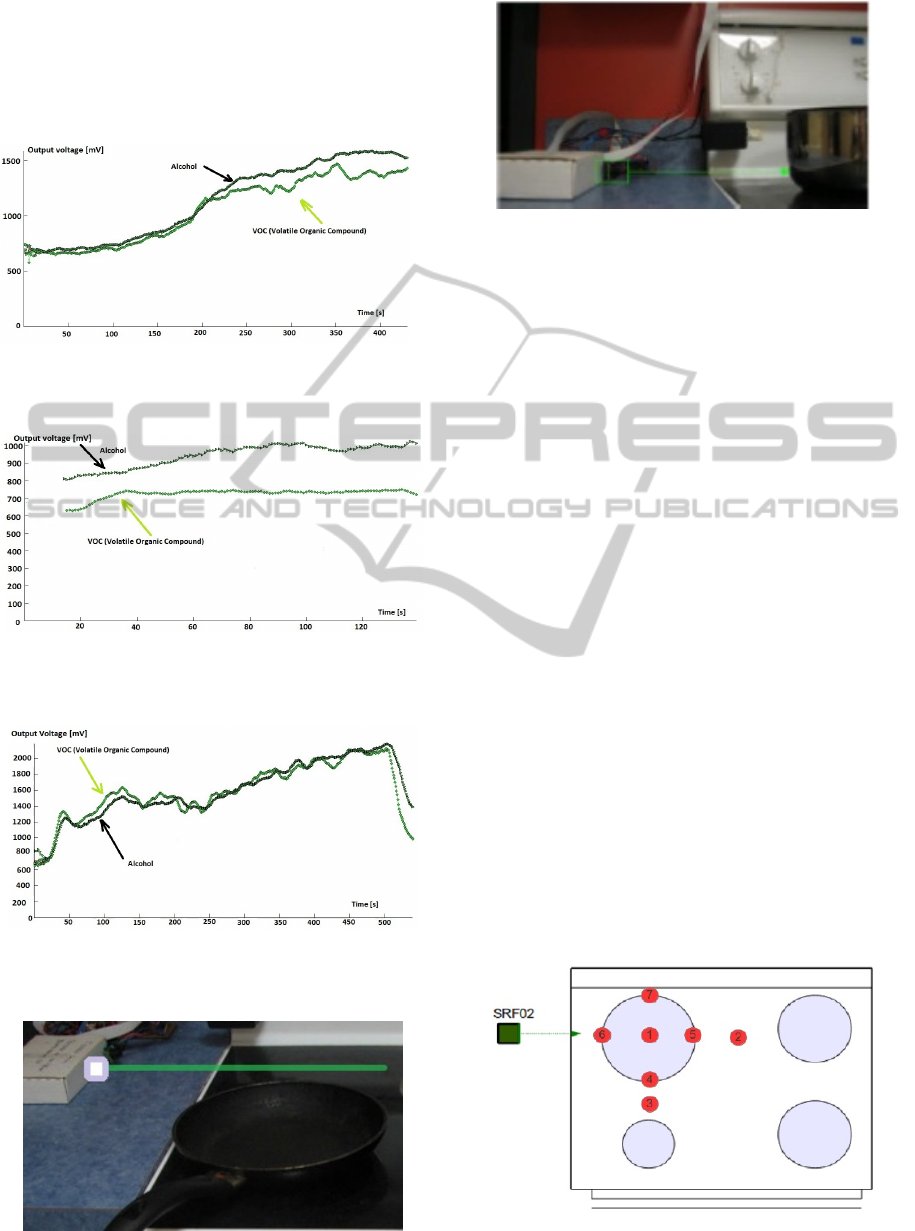
7.2.1 Results of VOC and Alcohol Sensors
We illustrate in
Figure 7
the distinct boundaries
between normal and risk situations according to
output voltages of the VOC and Alcohol sensors,
while cooking several kinds of food. The output
voltages of VOC and Alcohol sensors in normal
situations are as follows:
• In case of cooking hotdogs in a frying pan
(Figure 8), the maximal output voltages for
normal situation are around 1500 mV.
• In case of cooking fish, onion and peppers in a
frying pan (Figure 9), the maximal output
voltages for normal situation are near 1000
mV.
• In case of heating oil in a frying pan (e.g., for 8
minutes) (Figure 10), the maximal output
voltages for normal situation are near 2000 mV
because heated oil releases more VOC and
Alcohol in the cooking smoke compared to
cooking red meat, which releases more VOC
and Alcohol than cooking fish and vegetables.
Therefore, output voltages of VOC and Alcohol
sensors allow determining fire risk. If output
voltages are greater than 2000 mV, then there is a
potential fire risk.
7.2.2 Results of Presence Detection Sensor
SRF02 is an ultrasonic sensor used to detect
presence of utensil on burner, based on measuring
the distance between the sensor and the utensil.
Sonar wave propagation depends on the propagation
medium, so air variable conditions affect wave
propagation. Ultrasonic sensor must compensate
these effects in a variable environment. However,
this sensor does not integrate such compensations.
So, it has to be placed where the air is the most
stable as possible; otherwise measurements will not
Figure 7: Output voltages of Alcohol (TGS2620) and VOC (MICS5521) sensors in normal and risk situations.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
24
be precise. We excluded certain places such as the
oven hood (hot air, cooking gases, and evaporated
water) and the control panel because the temperature
will be very high. Therefore; we positioned the
presence sensor on the workspace around 20 cm to
the left of the burner as illustrated in Figure 11.
Figure 8: Output voltages of MICS5521 VOC and
TGS2620 Alcohol sensors when cooking hotdogs in a
frying pan.
Figure 9: Output voltages of MICS5521 VOC and
TGS2620 Alcohol sensors when cooking fish in a frying
pan.
Figure 10: Output voltages of MICS5521 VOC and
TGS2620 Alcohol sensors when frying oil during 8
minutes.
Figure 11: SRF02 sensor horizontal position.
Figure 12: SRF02 sensor vertical position (2 cm) above
workspace.
We found that the appropriate vertical
positioning of the SRF02 sensor is around 2 cm
above workspace (Figure 12). This vertical location
allows detecting the presence of utensils with little
height, like frying pan. If the sensor is vertically
located lower than 2 cm then parasite may affect its
measurements.
We tested SRF02 sensor by changing oven state
(on/off), utensil type, utensil volume, and position of
cooking utensil on burner. The goal of changing the
position of cooking utensil on burner is to study the
effect of heat on distance measurement. Figure 13
shows 7 different positions of the center of utensil.
A series of measurements was performed, and
yielded the following results:
• The very low position of the sensor is
appropriate because this does not cause
reflections. However; it must be horizontally
oriented.
• To maintain the stable state of the sensor, a
carton box covered it. Without these
precautions, parasitic reflections appear.
• The measured values would be aberrant, if a
cooking utensil was placed further than 30 cm
from the sensor.
• The experimental results show that the form and
volume of a cooking utensil has no impact on
distance measurement using SRF02 ultrasonic
sensor.
Figure 13: Positions of the center of utensil on burner for
testing SRF02 sensor.
TowardPervasiveComputingSystemtoEnhanceSafetyofAgeingPeopleinSmartKitchen
25
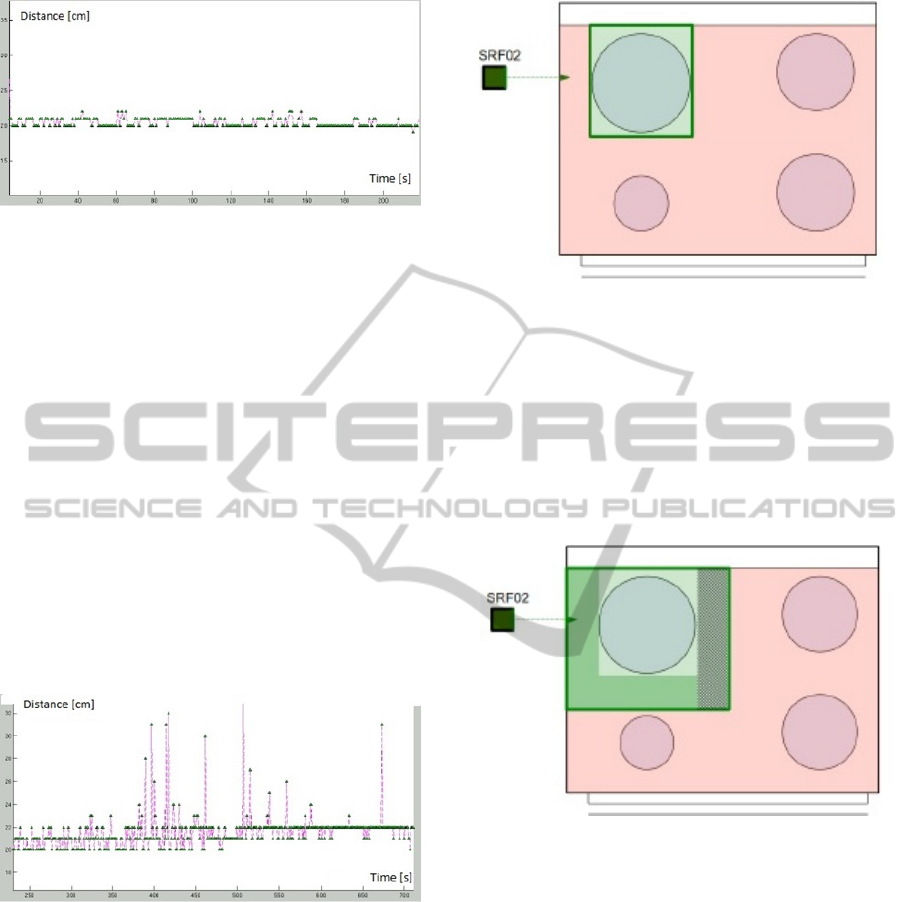
Figure 14: Distance measurements [cm] by SRF02 sensor
while cooking meat in a frying pan placed in the middle of
burner.
The obtained results prove that ultrasonic wave
propagation varies with surrounding air temperature.
Each time there is hot air between sensor and object,
the measurements becomes less reliable. This is the
case when the cooking utensil is not placed in the
center of burner, or the case when the cooking
utensil is smaller than the burner.
Figure 14 shows
distance measurements while cooking meat in a
frying pan which is larger than the burner and placed
in its center. The flow of hot air between the sensor
and the pan is minimal and hence measurements of
distance are reliable. Figure 15 shows variable
distance measurements while heating water in the
saucepan which is smaller than burner and placed in
its center. The reason for unreliable measurements is
that the exterior of the burner heats the surrounding
air between the sensor and the cooking utensil.
Figure 15: Distance measurements [cm] by SRF02 sensor
while heating water in a saucepan placed in the middle of
burner.
The previous results reveal that it is possible to
detect that an object is on burner. Variations in
distance measurements according to the position of
utensil allow us to determine a confidence zone,
such that, if an object is placed in the interior of this
zone, it is considered to be on the burner. The
confidence zone is illustrated in
Figure 16 and Figure
17.
Detecting that an object is on burner is
performed by comparing the distance returned by the
sensor with threshold values.
Figure 16: The ideal situation: if utensil is located inside
the rectangle (green zone), then it is on burner, otherwise
(pink zone) it is not.
7.2.3 Results of Humidity Sensor
As described in the sensors positioning section,
humidity sensor is placed at the oven hood’s level.
Steam is transported by the smoke released while
cooking process. The smoke rises up towards the
oven hood.
Figure 17: The actual situation: the inner rectangle (light
green zone) represents the real “on-burner” zone. A utensil
inside this zone is detected by SRF02. The outer rectangle
(dark green) zone represents the false positive zone of
SRF02 sensor where a utensil is detected as “on-burner”
and in reality it is outside burner. The shaded zone
represents the dead zone of the sensor.
This series of tests focuses on heating water using
kettle, saucepan, and saucepan with lid. The
experiments were performed with a cooking utensil
half-filled with water.
Figure 18 illustrates the
obtained results.
As expected, variations in humidity depend on the
quantity of steam released. While a lid covers the
saucepan, steam cannot be ejected. The hygrometer
starts and reacts immediately when steam is ejected.
The saucepan without a lid carries more knowledge
about boiling phenomena. Before water simmers, we
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
26
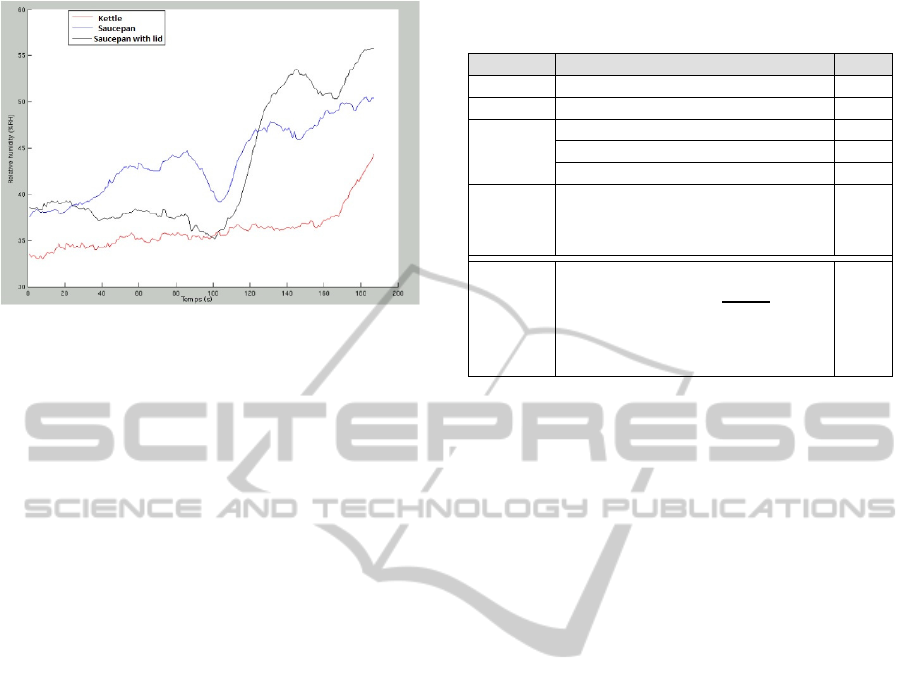
Figure 18: Relative humidity when water boils in: kettle,
saucepan, and saucepan with lid.
observe increment in relative humidity %RH, which
means that a small quantity of steam is released.
This indicates an object is heated on a burner. Then,
another increment of 5%RH indicates that water is
simmering so the global water temperature is around
100°C. It is important to notice the difference in
water temperature on the surface and in the bottom
of the saucepan. When steam is released, the
temperature of water molecules in the bottom of the
utensil becomes around 100°C, and these molecules
rise to the surface. The temperature of molecules on
the surface is lower. Therefore, rapid variation in the
humidity is an important indicator of water
temperature in a cooking utensil.
To conclude, previous tests show that it is
feasible to prevent splash burn risk based on relative
humidity, because it does not change significantly
unless a liquid is being heated. Tests also revealed
that there are clear thresholds which enables to
separate between normal and risk situations.
Therefore, an algorithm of splash burn prevention
can be established.
7.2.4 Results of Temperature Sensor
Hot objects during cooking are utensils and burner.
We performed 12 experimentations to measure the
temperature of cooking utensils when water boils:
three with a kettle, three with a frying pan, and six
with a saucepan. In addition, we investigated
dangerous situations by heating empty frying pan
and saucepan. These experiments cover the majority
of daily cooking situations. The motivation behind
experimenting with boiled water is to overcome the
measurements imprecision of the infrared sensor
used to measure the temperature of cooking
equipment since water boils at a known temperature
(100°C). The results are presented in
Table 2.
Table 2: Experimental results of the measured utensil
temperature when water boils.
Utensil Experiment configuration °C
Kettle middle of burner 40°C
Frying pan middle of burner 65°C
Saucepan
Bottom left corner of burner 58°C
Middle of burner of burner 80°C
Up right corner of burner 110°C
Saucepan,
Frying pan
,
Kettle
All utensils in the middle of burner,
which is preheated.
111°C
67°C
45°C
Frying pan
Kettle
Saucepan
Saucepan
Saucepan
All utensils are placed in the middle
of burner and heated empty (hazard
situation) during 5 minutes.
Bottom left corner of burner
Up right corner of burner
113°C
69°C
100°C
64°C
150°C
The imprecisions in measurement of utensil
temperature are due to the low infrared emissivity of
metals and to the heat of cooking that disturb the
measurements of this infrared sensor.
8 CONCLUSIONS
Enabling kitchen safety is a major factor in
independent living for ageing people. We present in
this paper our cooking-safe system and illustrated in
details the selected sensors that constitute the basic
building block of the system. We have started
building the system by performing an insightful
cooking risk analysis and assessment. As a result,
we identified the major risks during cooking as: fire,
burn (by contact or splash), and intoxication (by gas
or smoke). We also presented this paper our
experimental study to determine the pertinent
parameters to monitor in order to prevent the three
major risks. As results the parameters are: the
concentration of VOC, Alcohol, CO gases in the
cooking smoke, ambient temperature, temperature of
utensil, temperature of burner, relative humidity, and
presence of an object on burner. In addition, we
presented the significant experimental results used to
select the appropriate sensors to measure the
pertinent parameters. The presented results are the
foundation of our work on designing algorithms to
prevent fire, burn, and intoxication by gas/smoke
risks, which will be presented in other papers.
REFERENCES
Ahrens, M. 2008. Home Smoke Alarms: The Data as
Context for Decision. Fire Technology, 44(1), pp.313–
327.
TowardPervasiveComputingSystemtoEnhanceSafetyofAgeingPeopleinSmartKitchen
27

Alwan, M., Dalal, S., Mack, D., Kell, B., Turner, J.,
Leachtenauer and Felder. 2006. Impact of monitoring
technology in assisted living: outcome pilot. IEEE
Trans. Inf. Technol. Biomed., 10: 192–198.
Chen, J., Chi, P., Chu, Chen and Huang. 2010. A Smart
Kitchen for Nutrition-Aware Cooking. IEEE Pervasive
Computing.
Chen, Y., Lee, S., Chang, Y., and Wahlqvist, L. 2012.
Cooking frequency may enhance survival in
Taiwanese ageing. Public health nutrition, 15(07),
pp.1142-1149.
Doman, K., Kuai, Y., Takahashi, T., Ide, I., Murase, H.
2011. Video CooKing: Towards the synthesis of
multimedia cooking recipes. Lecture Notes in
Computer Science.
Gitlin, N. 2003. Conducting research on home
environments: Lessons learned and new directions.
The Gerontologist, 43(5), pp.628-637.
Hall. 2006. Home cooking fire patterns and trends.
National Fire Incident Reporting System (NFIRS).
Jacobsen, A., Kent, M., Lee, M., Mather, M. 2011.
America’s aging population. Population Bulletin,
66(1), pp. 1-20.
Kaplan, S., and Garrick, J., 1981. on the quantitative
definition of risk. Risk Analysis, 1(1).
Li, Y., Asghar, Z, Pulii, P. 2013. Visually-aided smart
kitchen environment for senior citizens suffering from
dementia. In proceedings of the IEEE International
Joint Conference on: Awareness Science and
Technology and Ubi-Media Computing (iCAST-
UMEDIA), pp. 584-590.
Loraine, Cole, Samantha, Daniel, Wan. 2014. 65+ in the
United States, U.S. Census Bureau, Government
Printing Office, Washington, DC.
Lushaka, B., and Zalok, E. 2014. Development of a
sensing device to reduce the risk from kitchen fires.
Fire technology, 50(3), pp.791-803.
Martel, L. and Menard, F. 2011. Statistics Canada,
Canadian Census, Demography Division.
Marzocchi, W., Garcia-Aristizabal, A., Gasparini, P.,
Mastellone, L., and Di Ruocco, A. 2012. Basic
principles of multi-risk assessment: a case study in
Italy. Natural hazards, 62(2), pp.551-573.
Public Health agency of Canada. 2006. Healthy Aging in
Canada: A new Vision, From Evidence to Action.
Reducing stovetop fire. Fire Marshal's Public, 2009.
Sanchez, A., Burnell, L. 2013. Intelligent and Adaptive
Educational-Learning, Springer. Intelligent and
Adaptive Educational-Learning Systems Smart
Innovation, Systems and Technologies, vol. 17,
pp.293-314.
Sperling, Reisa. 2011. Toward defining the preclinical
stages of Alzheimer’s disease: Recommendations from
the National Institute on Aging-Alzheimer's
Association workgroups on diagnostic guidelines for
Alzheimer's disease. Alzheimer's and Dementia,
pp.280-292.
Toshio, O., and N. Iwasaki. 2013. Innovative applications
and strategy on ICT applications for aging society:
case study of Japan for silver ICT innovations. In
Proceedings of the 7th ACM International Conference
on Theory and Practice of Electronic Governance.
Wahl, W., and Gitlin, N. 2003. Future developments in
living environments for older people in the U.S. and
Germany: Potential and constraints. In Aging
independently: Living arrangements and mobility. pp.
281–301. New York: Springer.
Wai, A. Shanthini D., Biswas, J. and Panda, S. 2011.
Pervasive intelligence system to enable safety and
assistance in kitchen for home-alone ageing. Toward
Useful Services for Ageing and People with
Disabilities, Berlin: Springer, pp.276-280.
Yuan, J., Green, R., Goubran. 2012. Thermal Imaging for
Assisted Living At Home: Improving Kitchen Safety.
Journal of Med. Biol. Eng.
ICT4AgeingWell2015-InternationalConferenceonInformationandCommunicationTechnologiesforAgeingWelland
e-Health
28
