
Improving Signal of Opportunity Localisation Estimates in
Multipath Environments
Thomas O. Mansfield, Bogdan V. Ghita and Adrian Ambroze
School of Computing and Mathematics, Plymouth University, Plymouth, UK
{thomas.mansfield, bogdan.ghita, m.ambroze}@plymouth.ac.uk
Keywords: Leading Edge Detection, Time of Arrival Localisation, Indoor Navigation, Signals of Opportunity.
Abstract: Network based geographic localisation has been widely researched in recent years due to the need to locate
mobile data communication nodes to a level of accuracy equivalent to that provided by global navigation
satellite systems (GNSS) in multipath urban and indoor environments. This paper investigates whether direct
sequence spread spectrum (DSSS) signal processing can be applied to narrow-band radio channels to improve
the ranging estimates. The DSSS signal processing application is then developed further to provide a method
of deriving a measurement confidence indicator, allowing the optimisation of time separated measurements
in a dynamic signals of opportunity radio environment. A set of validation tests demonstrates that the proposed
method provides a significant improvement in the accuracy and robustness of the ranging estimate compared
to simple threshold analysis in multipath environments.
1 INTRODUCTION
Radio positioning systems have achieved common
use in a diverse range of systems. The most
commonly used radio positioning systems are global
navigation satellite systems (GNSS). These systems
use signals received from satellite to calculate the
position of the user to within 4m during 95% of the
time (Norman Bonnor, 2012). GNSS systems rely on
a line of sight (LoS) view of at least 4 satellites. This
requirement cannot however, be guaranteed in urban
or indoor environments where ‘urban canyons’ and
roof cover, block sight to much of the surrounding
sky. Research has been carried out into using signals
of opportunity for localisation in such environments,
particular success has been achieved by using time of
arrival (ToA) systems to derive a user’s location
(Norman Bonnor, 2012), even in urban or indoor
environments where multipath propagation is one of
the main sources of system error 0. Constructive and
deconstructive interference between the non-line of
sight (NLoS) propagating signals can destroy or
obscure the LoS signal that is required to derive an
accurate ToA estimate.
Ultra wide band (UWB) signal analysis
techniques, originally developed for low emission
radar 0, have achieved promising results when
applied to localisation in wide bandwidth direct
sequence spread spectrum (DSSS) networks (00).
These techniques rely on the differing multipath
properties of the wide spread of frequencies to
provide an improved leading edge time of arrival
(ToA) estimate and to achieve GNSS levels of
accuracy in wide bandwidth multipath environments.
This paper builds on the use of prior art wide
bandwidth signal processing techniques and
investigates their use in signals of opportunity
networks that commonly collect time separated
narrow bandwidth measurements such as frequency
hopping spread spectrum (FHSS) networks. FHSS
networks are typical to military 0 and civilian (IEEE,
2014. IEEE 802.22) systems and challenges remain to
use them to achieve GNSS levels of location accuracy
in multipath environments 0 due to the time separated
nature of the received signals.
This paper proposes a method that allows the
system to use time separated ToA estimates and,
without prior training or additional data collection,
generate a low latency and high bandwidth filtered
ranging estimate. The benefits of the proposed
method are verified through simulation. The accuracy
and responsiveness of the ranging estimate shall be
analysed in both static and mobile receiver
environments.
This paper is organised as follows; Section 2
discusses the prior art. Section 3 proposes a method
to use the leading edge detection algorithm to extract
43
O. Mansfield T., Ghita B. and Ambroze A.
Improving Signal of Opportunity Localisation Estimates in Multipath Environments.
DOI: 10.5220/0005889200430048
In Proceedings of the Fourth International Conference on Telecommunications and Remote Sensing (ICTRS 2015), pages 43-48
ISBN: 978-989-758-152-6
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the data required to weight the values in a recursive
filter. Section 4 provides details of the simulation
environment and evaluates the ranging estimate
performance. Section 5 concludes and discusses
further work.
2 PRIOR ART
2.1 Leading Edge Detection
Basic ToA detection systems commonly use simple
threshold based leading edge detection 0), which
relies on the assumption that the LoS message will
arrive first via the shortest direct path. In many
situations however, the LoS component may be
heavily attenuated by deconstructive multipath
interference providing a leading error driver for
indoor or urban ranging system accuracy.
Search-back algorithms improve on the ToA
accuracy by analysing the received packet and
performing a search-back to determine physical layer
properties of the message to determine the time of
arrival more robustly (Haneda K., 2009). These
algorithms require prior knowledge of the multipath
environment which cannot be provided in many
applications.
The Multiple Signal Classification (MUSIC)
algorithm (Schmidt R. O. 1986) extends the analysis
to allow multipath signals to be used as a further
information source and has become widely used in
research. This algorithm requires a substantial
training period to determine the number of multipath
signals present to achieve better performance than
relying on leading edge detection alone. Again, a
training period is not practical in many applications
where the device is to be used to navigate around an
unknown area.
UWB signal processing techniques utilise the
wide frequency range of the received signals to
provide an improved ToA estimate. The analysis of
the full frequency range available allows the user to
determine frequency specific multipath variations
and make an improved estimation of the true ToA
reading. A widely implemented example of an
existing UWB signal processing technique, described
in 0, has been selected for further development in this
paper. This technique was developed to detect the
leading edge of a signal obtained from a wide
bandwidth transmission. It has been selected for
further development due to the fact that the running
filters applied to the raw data may provide additional
data to the user following further analysis.
The UWB signal processing technique is applied
to any wide band received data as follows: if h(t)
represents the received signal in the time domain, it is
first passed through a rectified moving average filter
as shown in (1).
t
nti
thabs
n
ty
1
]))([(
1
)(
(1)
The averaged signal y[t] is then passed through two
filters of sizes n
1
and n
2
which return the maximum
value from a sliding window, as shown in (2) and (3).
max_n
1
[t]= max(y
t -n
1
...y
t
)
(2)
)...max(][max_
2
2 tnt
yytn
(3)
A binary indicator of whether a leading edge has been
detected can be obtained from (4).
)][(max_&
])[max_2*][(max_][
2
21
threshtn
tntntr
(4)
The threshold detection level, thresh, is typically set
to 3σ of inter message in-channel received signal
noise.
2.2 Application Considerations for
Navigation Filters
Recursive averages are commonly used in navigation
systems to produce a low noise and low latency
location estimate from a noisy measurement input. In
order to provide an efficiently filtered output, the
measurement system that populated the recursive
filter must provide not only a measurement value, but
also a dynamic confidence indicator.
When using a simple threshold detection
algorithm to detect the leading edge of a received
signal, the only information that can be provided to
the navigation filter is the time when a received value
is greater than the selected threshold. If this
information is available for each FHSS channel, a
simple un-weighted recursive filter shown in (5) can
be constructed to update the users filtered location
based on the its previous position and the latest sensor
data where, as commonly used in filter notation,
x
ˆ
represents the filter output,
x
represents the previous
state and
x
~
represents the latest sensor value. The
measurement confidence is represented by α.
Fourth International Conference on Telecommunications and Remote Sensing
44

xxx
~
)1(
ˆ
(5)
The filter represented in (5) may be tuned by
adjusting the value of α by a predetermined value.
A value of α < 0.5 reduces the noise of the filter
output at the expense of a higher latency if the
receivers true location changes. A value of α > 0.5
generates a more responsive, lower latency filter
output but the filter output noise will be adversely
affected. Both of these options are unsuitable for
many system applications.
3 PROPOSED METHOD
The leading edge detection algorithm described in
section 2.1 has been developed for wide band signal
processing and analyses all of the data from the wide
frequency range with each measurement.
The receiver system to be developed by this paper
makes a ranging estimate upon detection of the
leading edge of a received signal using the signal
processing technique described in section 2.1. The
process of running the n
2
filter (3) to return the
maximum value in the longer sliding window
continues for the duration of the first message in the
current FHSS channel. The data obtained from the
maximum value sliding windows is placed into a
column vector and a standard deviation taken to
determine the presence and magnitude of multipath
present throughout the message. This is then
correlated to provide a numerical confidence value.
The process is represented in equations (6) and
(7). The standard deviation, σ, is first calculated in (6)
with n
2
as the filter length, x
i
is each iterative filter
value and x
a
is the current filter average. This
standard deviation is then normalised in (7) to
produce a dynamic measurement confidence, α.
2
2
1
2
2
)(
1
n
i
ain
xx
n
(6)
)1(
2
2
n
n
(7)
α represents a confidence factor with a weighted
value between 0 and 1 for low to high confidence
measurements respectively. This confidence measure
can then be used to dynamically tune the filter shown
in (5) to generate a recursive filter input that benefits
from both low noise and low latency. This has been
achieved by providing a high weighting value to
ranging estimates received with good confidence and
a low weighting to estimates with a low confidence,
even if there has been true movement by either the
transmitter or receiver.
The ability to achieve this from a multipath data
source dynamically and without prior knowledge is of
a key benefit in higher level navigation systems, as
discussed in section 2.2. This confidence weighting
has been achieved without the use of any additional
information or averages over the ones implemented to
allow the improved leading edge detection.
4 SYSTEM VALIDATION
4.1 Simulator Validation
A simulated radio frequency (RF) environment was
modelled in Matlab® and Simulink® to evaluate the
effectiveness and performance of the techniques
discussed in section 3. The simulation uses the
standard multipath simulation model (Alsindi N.A,
2004) shown in (8) where L
p
is the number of
multipath components, α is the complex attenuation
and τ is the propagation delay.
1
0
)()(
p
L
k
kk
tth
(8)
The simulation assumes that an idealised
transmitter generates a single frequency modulated
pulse; for validation, the FHSS network parameters
included 100 20 kHz channels evenly spaced from 3
to 5 GHz. The transmitted pulse is then subjected to
empirically derived propagation and receiver
distortions to produce a received signal for analysis.
The resulting signal includes simulated effects of
multipath with the use of separate propagation
channels, the number of which can be set by the user.
The simulations evaluated throughout this paper will
consider a LoS propagation path of 10 m with several
multipath reflection paths with an apparent time path
from the transmitter to the receiver consistent with
10.1 m to 11.2 m propagation distances.
This simulated environment has been used to
ascertain the performance of a simple threshold
detection algorithm in a Monte Carlo based
simulation of a wide range of FHSS channels in a
fixed geometry. A typical single transmitted message
and the received signal patterns in a high multipath
environment can be seen in Fig 1.
Improving Signal of Oppourtunity Localisation Estimates in Multipath Environments
45
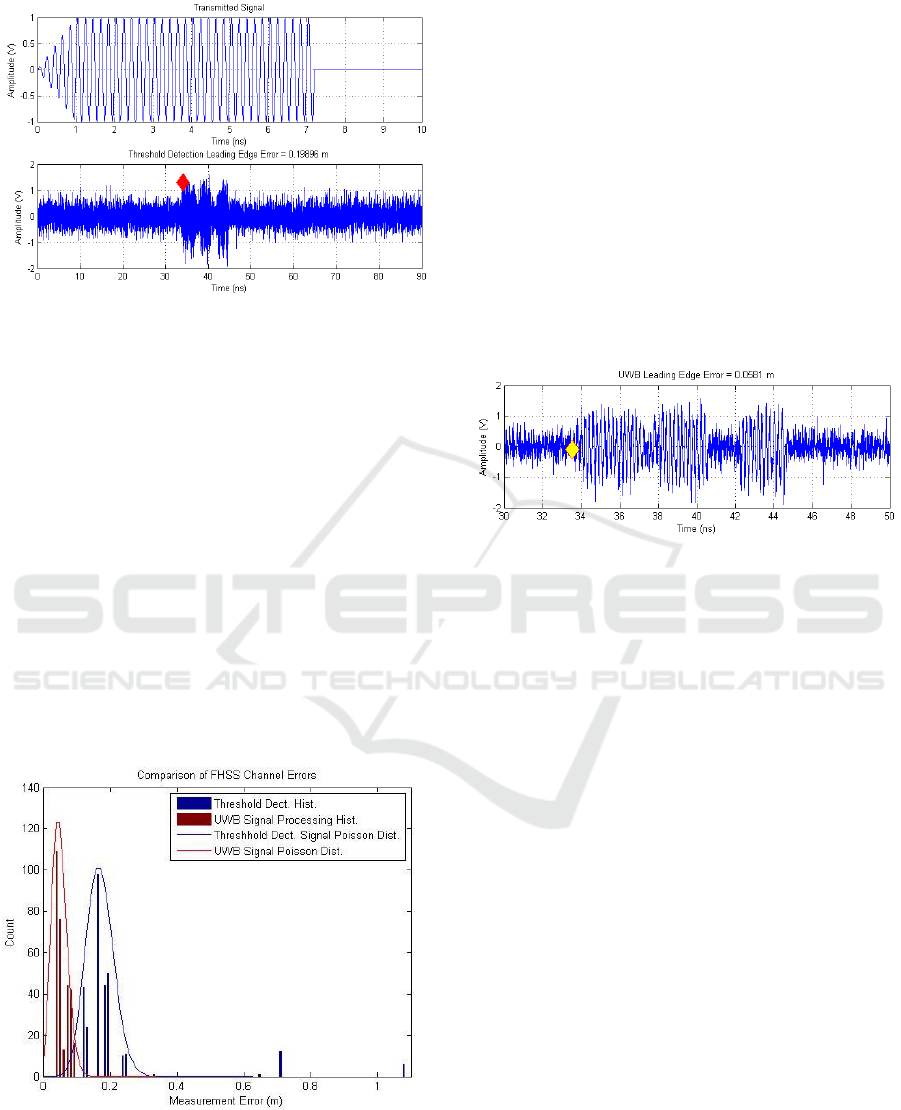
Figure 1: Transmitted (top) and received (bottom) pulse
with the location of the detected leading edge of the pulse
marked by the red symbol.
The threshold detection algorithm has been
simulated assuming a static receiver and transmitter
across a range of FHSS channels to benchmark the
simulation. The results can be seen in Fig. 2 and
shows properties that are expected in multipath
environments, as seen in (Norman Bonnor, 2012)]
and 0). The similarity to data collected by practical
test in previous research provides confidence that the
simulation is representative.
4.2 Technique Validation
A comparison of edge detection seen by employing
UWB signal processing techniques to each narrow
bandwidth channel as opposed to simple threshold
detection can be seen in Fig. 2.
Figure 2: Comparison of threshold based and UWB signal
processing leading edge detection methods.
Analysis shows that the Poisson distribution
variance has a λ value of 17 for the threshold
detection algorithm and an improved λ value of 5 for
the UWB threshold detection. The received estimates
across the range of networks not only have less
average error but also a greater distribution density
than can be obtained from simple threshold detection
alone. As well as a significant improvement in the
Poisson distribution, the UWB based edge detection
algorithm removes the erroneous outliers seen at ≈ 0.7
m and ≈ 1.1 m error in the threshold detection
algorithm. This behaviour may account for the high
multipath uncertainty seen in (Faragher R. M., 2007)
where a simple threshold detection algorithm was
used to detect the ToA to estimate range.
Detail of the detected trigger timing at the leading
edge of a signal with light multipath is shown in Fig.
4.
Figure 3: UWB leading edge detection of pulse in a noisy
multipath environment.
Figure 3 is a magnification of the area of interest,
related to the transmission pulse as shown in Fig. 2.
Areas of constructive and deconstructive multipath
effects can be seen throughout the 34 ns to 42 ns
region where a non-multipath signal would be
expected to produce a stable series of 1 V peaks.
The simulation has shown that the evaluation tests
for the UWB algorithms discussed in section 2.1
produce a significant improvement over threshold
detection when providing ToA estimation in high
multipath FHSS networks when only a single narrow
bandwidth channel can analysed at a time.
Further to the improvement shown in ToA
estimates in a high multipath environment, the
application of the additional data available, described
in section 3, to a recursive navigation filter is
analysed in the remainder of this section.
The application of threshold analysis data, where
no weighting data is available for the new samples,
into the simplified recursive filter leads to a noisy and
poorly filtered position estimate. Fig 4. compares a
plot of the raw measured and filtered ranging estimate
obtained from a simulation of a static system that
sweeps through 100 FHSS channels over a 5 second
period.
Fourth International Conference on Telecommunications and Remote Sensing
46
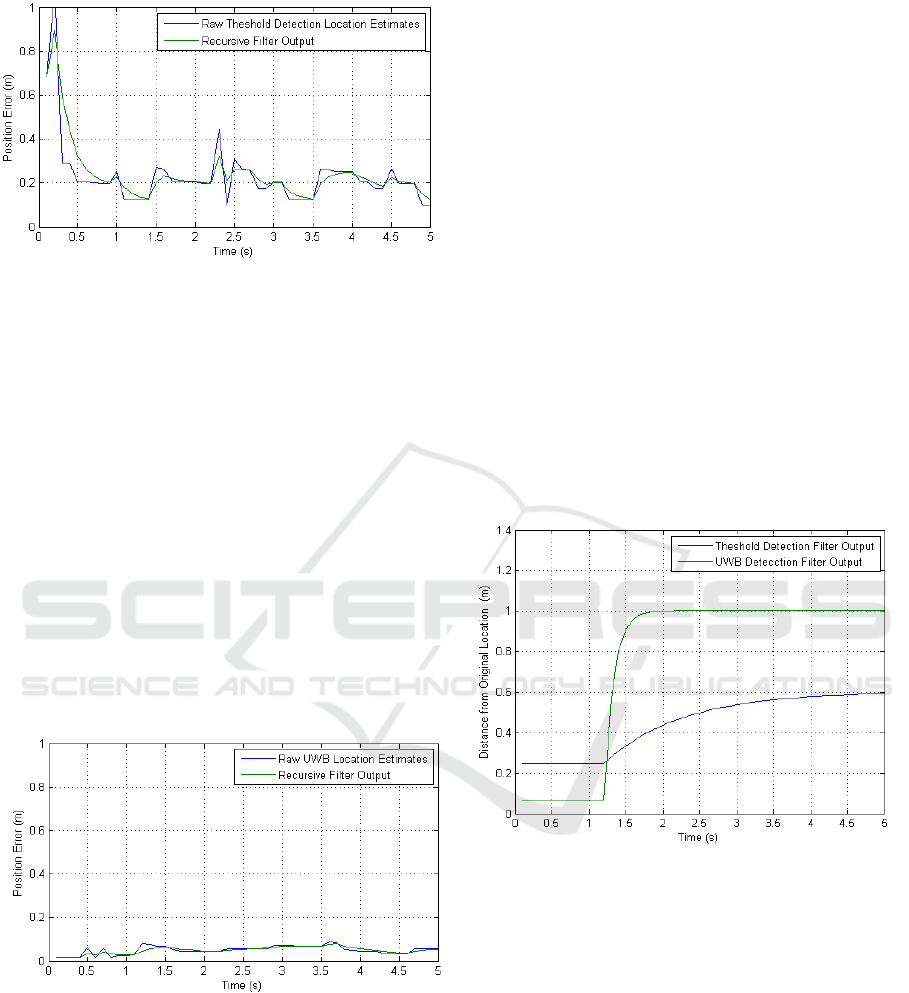
Figure 4: The raw and filtered output from the threshold detection
algorithm with a pre-selected static confidence interval.
The results displayed in Figure 4 verify that the
filtered position estimate from an un-weighted
recursive filter is comparatively noisy and produces a
large filtered error in the event of a multipath
x
~
leading edge detection received from the sensor, as
seen approximately 0.2 seconds into the simulation.
The application of the position estimates and the
relative variance derived using the method described
in section 3 has been applied to a weighted navigation
filter. The application of this navigation filter in the
simulation leads to improved stability to the position
estimate which, combined with the improvement in
leading edge detection reliability and the absence of
outliers, leads to a greatly improved position estimate
over the threshold detection algorithm, as shown in
Fig. 5.
Figure 5: The raw and filtered output from the navigation filter
with UWB leading edge detection and dynamically obtained
confidence interval. This should be compared with Fig 6 to see the
improvement achieved.
In a physically static system, as simulated in Fig 4
and Fig. 5, where the relative position of the
transmitter and receiver does not change, the
sensitivity to erroneous data could be mitigated by
weighting the raw sensor data by a pre-determined
factor of < 1 depending on sensor noise. While this
will limit the filter error in the event of erroneous
multipath readings and produce a more accurate
location estimate, it also introduces high latency if the
receiver or transmitter truly moves location. The
application of a dynamically weighted recursive filter
prevents an erroneous multipath ToA reading from
causing filter noise. If however, the system truly
moves, a new filter input with a new position estimate
with a high weighting will be received and the filter
output will respond with little latency.
A further simulation was run to evaluate the effect
of a true receiver motion on the filter output. To
simplify the simulation, a single narrow bandwidth
channel with no frequency hopping was used
throughout the experiment. After approximately 1.2s
into the simulation, the receiver node instantaneously
moves 1m within a multipath environment and
remains static for the remainder of the simulation.
Fig. 6 shows a comparison of the filter response
to the applied motion with both threshold detection
and UWB detection inputs.
Figure 6: The response of the filters to an instantaneous 1 m
movement of the receiving node.
The threshold detection filter still has a greater
error before and after the 1 m move of the receiver
node than the UWB filter, as expected. The area of
interest highlighted by this simulation is the
difference in time taken for the filter output to identify
the change in location. The dynamic weighting to
x
~
allows the UWB filter to respond with minimal
latency in the event of true receiver or transmitter
movement. The improvement seen in Fig 6 is due to
both the improved UWB ranging estimate, shown in
Fig 2 and the ability to weight the measurements.
These contributing factors have not been analysed
separately due to the fact that the weighted recursive
Improving Signal of Oppourtunity Localisation Estimates in Multipath Environments
47

filter may be implemented without any additional
data collection and should always be used to provide
an optimised solution.
5 CONCLUSIONS AND FURTHER
WORK
This paper proposed a set of algorithms and
application techniques that improve narrow
bandwidth channel ranging estimates in signals of
opportunity environments. The novel application and
further development of DSSS signal processing
techniques to provide not just an improved ranging
estimate but, by re-analysing existing data, an
additional confidence weighting.
By re-analysing the available data, a filter
confidence factor can be obtained that can be
calculated dynamically without the need for a training
period and without any prior knowledge of the radio
system and environment. More specifically, the use
of UWB signal processing techniques provided an
approximately 4 times improvement in ranging
estimation over simple threshold detection even in
narrow bandwidth channels, including a better
Poisson distribution and higher resilience to false
detections.
The main benefit of applying this technique is that
a filtered ranging estimate can be obtained that is
more accurate, lower noise and lower latency than can
be obtained by using simple threshold detection
techniques to detect the leading edge of a message.
The analysis of the proposed technique
performance throughout this paper has been carried
out only in multipath environments. It is anticipated
that the benefits of the technique will be significantly
less apparent in less hostile environments.
Future work should include the physical test of
this system to verify the model. The integration of the
algorithm into higher level systems is also required to
verify the higher level benefits shown during
simulation. The close coupling of this system with
higher level navigation systems, in particular Kalman
filtering schemes may also allow the development of
a significantly improved signal of opportunity based
localisation system.
REFERENCES
Air Commodore Norman Bonnor, 2012. A Brief History of
Global Navigation Satellite Systems, Royal Institute of
Navigation Journal of Navigation vol. 65.
Faragher R. M, Duffett-Smith P.J, 2010. Measurements of
the effects of multipath interference on timing accuracy
in a radio positioning system, IET Radar, Sonar and
Navigation, vol. 4, iss. 6, pp. 818-824.
Fontana R. J., 2004. Recent System Applications of Short-
Pulse Ultra-Wideband (UWB) Technology. Published in
IEEE Microwave Theory and Techniques, Vol. 52, Issue
9.
Mahfouz M. R., et. al, 2008. Investigation of high accuracy
indoor 3-D positioning using UWB technology, IEEE
Trans. Microwave Theory and Technology, pp. 1316-
1330.
Merkl B., 2008. The future of the operating room: surgical
preplanning and navigation using high accuracy ultra
wide-band positioning and advanced bone
measurement, Ph.D Dissertation, The University of
Tenessee, USA.
Grumman Northrop, 2013. Understanding Voice and Data
Link Networking, Guidebook, Northrop Grumman, San
Diego, USA.
IEEE, 2014. IEEE 802.22 Working Group – Enabling
Broadband Wireless Access Using Cognitive Radio
Technology http://www.ieee802.org/22/ Accessed 14
th
November 2014.
Xu P., Palmer R.J and Jiang Y, 2005. An Analysis of
Multipath for Frequency Hopping Spread Spectrum
Ranging. IEEE Conference on Electrical and Computer
Engineering.
Haneda K., 2009. Performance Evaluation of Theshold
Based UWB Ranging Methods – Leading Edge vs,
Search Back, 2rd European Conference on Antennas
and Propagation.
Schmidt R. O. 1986, Multiple Emitter Location and Signal
Parameter Estimation, IEEE Trans. Antennas
Propagation, Vol. AP-34 (March 1986), pp.276-280
Alsindi N.A, 2004. Performance of TOA Estimation
Algorithms in Different Indoor Multipath Conditions.
PhD Thesis, Worcester Polytechnic Institute.
Faragher R. M., 2007. Effects of Multipath Interference on
Radio Positioning Systems, Ph.D. dissertation, Dept.
Physics., University of Cambridge, Cambridge
Fourth International Conference on Telecommunications and Remote Sensing
48
