
HMM-based Activity Recognition with a Ceiling RGB-D Camera
Daniele Liciotti
1
, Emanuele Frontoni
1
, Primo Zingaretti
1
, Nicola Bellotto
2
and Tom Duckett
2
1
Dipartimento di Ingegneria dell’Informazione, Universit
`
a Politecnica delle Marche, Ancona, Italy
2
School of Computer Science, University of Lincoln, Lincoln, U.K.
{d.liciotti, e.frontoni, p.zingaretti}@univpm.it, {nbellotto, tduckett}@lincoln.ac.uk
Keywords:
ADLs, Human Activity Recognition, HMMs.
Abstract:
Automated recognition of Activities of Daily Living allows to identify possible health problems and apply
corrective strategies in Ambient Assisted Living (AAL). Activities of Daily Living analysis can provide very
useful information for elder care and long-term care services. This paper presents an automated RGB-D video
analysis system that recognises human ADLs activities, related to classical daily actions. The main goal is
to predict the probability of an analysed subject action. Thus, abnormal behaviour can be detected. The
activity detection and recognition is performed using an affordable RGB-D camera. Human activities, despite
their unstructured nature, tend to have a natural hierarchical structure; for instance, generally making a coffee
involves a three-step process of turning on the coffee machine, putting sugar in cup and opening the fridge
for milk. Action sequence recognition is then handled using a discriminative Hidden Markov Model (HMM).
RADiaL, a dataset with RGB-D images and 3D position of each person for training as well as evaluating the
HMM, has been built and made publicly available.
1 INTRODUCTION
The Activities of Daily Living (ADLs) are a series of
basic activities performed by individuals on a daily
basis necessary for independent living at home or in
the community. ADLs include eating, taking medi-
cations, getting into and out of bed, bathing, groom-
ing/hygiene, dressing, socializing, cooking, cleaning
and walking. Automated recognition of ADLs is also
of interest to the scientific community because of its
potential applications in retail and security. Further-
more, monitoring human ADLs is important in order
to identify possible health problems and apply cor-
rective strategies in Ambient Assisted Living (AAL).
ADLs analysis can provide very useful information
for elder care and long-term care services.
This aspect can be observed in the recent appear-
ance of smart environments, such as smart homes.
Thanks to these advanced technologies, the assis-
tance, monitoring and housekeeping of chronically ill
patients or persons with special needs or elderly has
been enabled in their own home environments, in or-
der to foster their autonomy in daily life by providing
the required services when and where needed.
By using such systems, costs can be reduced con-
siderably, while alleviating some of the pressure on
healthcare systems. However, many issues related to
this technology are raised such as activity recognition,
assistance, monitoring and person re-identification.
Successful research has so far focused on rec-
ognizing simple human activities or properly re-
identifying a person in a particular scenario. Recog-
nizing complex activities remains a challenging and
active area of research.
For instance, dementia diseases of the elderly have
a strong impact on ADLs. In fact, the aging diseases
result in a loss of autonomy. Medical researches (Dar-
tigues, 2005) have shown that early signs of diseases,
such as Alzheimer, can be identified up to ten years
before the current diagnostics. Therefore the analysis
of possible lack of autonomy in the ADLs is essential
to establish the diagnostics and give all the help the
patient may need to deal with the disease.
Being able to automatically infer the activity that
a person is performing is essential for many disabili-
ties in older adults, which have been associated with
functional status based on ADLs in individuals with
stroke, Parkinson’s disease, traumatic brain injury,
and multiple sclerosis. The way to determine the au-
tonomy of patient is to analyse his ability to execute
the ADLs in his own environment. However, it can be
complicated for a doctor to come and watch the pa-
tient doing these ADLs, as this would be a very time
consuming task. An alternative would be to record the
Liciotti, D., Frontoni, E., Zingaretti, P., Bellotto, N. and Duckett, T.
HMM-based Activity Recognition with a Ceiling RGB-D Camera.
DOI: 10.5220/0006202305670574
In Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2017), pages 567-574
ISBN: 978-989-758-222-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
567

patient doing ADLs with a camera.
Previous papers on activity classification have fo-
cused on using 2D video (Ning et al., 2009) (Gupta
et al., 2009) or RFID sensors placed on objects and
humans (Wu et al., 2007). The use of 2D videos leads
to low accuracy even when there is no clutter (Liu
et al., 2008). Moreover, RGB-D cameras are com-
monly used for the recognition of human actions (Li-
ciotti et al., 2015). Instead, the use of RFID tags is
generally too intrusive because it requires RFID tags
on the people.
True daily activities take place in uncontrolled
and cluttered households and offices and they do not
happen in structured environments (e.g., with closely
controlled background). For this reason their detec-
tion becomes a much more difficult task. In addition,
each person has their own habits in carrying out tasks,
and these variations in style and speed create addi-
tional difficulties in trying to recognise and to detect
activities.
In this work, we are interested in reliably detecting
daily activities that a person performs in the kitchen.
In this context, this paper proposes an automated
RGB-D video analysis system that recognises human
ADLs activities, related to classical actions such as
making a coffee. The main goal is to classify and pre-
dict the probability of an analysed subject action. We
perform activity detection and recognition using an
inexpensive RGB-D camera. Human activities, de-
spite their unstructured nature, tend to have a natural
hierarchical structure; for instance, generally making
a coffee involves a three-step process of turning on
the coffee machine, putting sugar in the cup and open-
ing the fridge for milk. Action sequence recognition
is then handled using a discriminative hidden Markov
model (HMM). A dataset with RGB-D images and 3D
position of each person for training as well as evaluat-
ing the HMM has been developed and made publicly
available.
Several contributions are made by our work. First
of all, our model is generic, so it can be applied to
any sequential datasets or sensor types. Second, our
model deals with the problem of scalability by taking
into account the sequences recorded independently of
the environment. Finally, our approach is validated
using real data gathered from a real smart kitchen
which helps to make our results more confident and
our experiments repeatable.
The innovative aspects of this paper are in propos-
ing an adequate HMM structure and also the use of
head and hands 3D positions to estimate the probabil-
ity that a certain action will be performed, which has
never been done before, for the best of our knowledge,
in ADLs recognition in indoor environments.
The remainder of the paper is organized as fol-
lows: Section 2 gives details on the state of art on hu-
man activity recognition; Section 3 describes in detail
the problem formulation for the design of the HMM
structure and the ADLs model that is the core of our
work; the following section (Section 4) describes the
collection of the data acquired and presents the RA-
DiAL Dataset (Recognition of Activity DAily Liv-
ing); the final sections present the experimental re-
sults (Section 5), and the conclusions (Section 6) with
our future works in this direction.
2 RELATED WORK
Recognizing ADLs is a potential field where com-
puter vision can really help, for example, elderly peo-
ple to improve the quality of their lives (Pirsiavash
and Ramanan, 2012). Several research works and
several models are proposed to recognize activities
with intrusive and non-intrusive approaches. Activ-
ity recognition using intrusive approaches requires the
use of specific equipment such as cameras.
Previous works on detection of human activities
have been developed from still images as well as
videos (Maji et al., 2011) (Ryoo, 2011) (Hoai and
De la Torre, 2014). Many papers have shown that
modeling the mutual context between human poses
and objects is useful for activity detection (Prest et al.,
2012) (Koppula et al., 2013).
The recent availability of affordable RGB-D cam-
eras, together with depth information, has enabled
significant improvement in scene modeling, estima-
tion of human poses and obtaining good action recog-
nition performance (Jiang and Saxena, 2013) (Liciotti
et al., 2014) (Sturari et al., 2016). This topic is very
challenging and important because understanding and
tracking human behaviour through videos has several
useful applications. In (Nait-Charif and McKenna,
2004) Nait-Charif et al. developed a computer-vision
based system to recognize abnormal ADLs in a home
environment. The system tracked human activity and
summarized frequently active regions to learn a model
of normal activity and the system could then detect
falling as an abnormal activity.
Activity recognition with non-intrusive systems is
a complex task, and it is based on a deep analysis
of the data gathered from the environment. The sen-
sors in the environment record the events about the
state and any changes that happen within it. Each se-
quence of events is associated to a particular activ-
ity. The same person can perform an activity in sev-
eral ways. This variation in the behaviour of a person
leads to the generation of a set of patterns that char-
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
568

acterize this person. In this light, the variability in the
person’s behaviour and activity, detecting interesting
patterns among many others, is a task of great impor-
tance for understanding the general behaviour of the
person (Ali et al., 2008). In fact, by discovering fre-
quent patterns, the underlying temporal constraints,
association rules, progress and changes over time, it
is possible to characterize the behaviour of persons
and objects and automate tasks such as activity moni-
toring, assistance and service adaptation (Rashidi and
Cook, 2010).
Currently, there are many mathematical mod-
els for activity recognition, such as HMMs (Ra-
biner, 1989), Bayesian Networks (Oliver and Horvitz,
2005), Kalman Filters (Bodor et al., 2003) and Neu-
ral Networks (Bodor et al., 2003). Deep learning ap-
proaches on RGB video streams for activity recogni-
tion have also been introduced. This creates a system
that improves and learns itself by updating the activ-
ity models incrementally over time (Hasan and Roy-
Chowdhury, 2015).
Traditionally, most activity recognition work has
focused on representing and learning the sequential
and temporal characteristics in activity sequences.
This has led to the widespread use of the HMM. In
fact, in (Sung et al., 2011) HMM is employed with
depth images to effectively recognize human activ-
ities. An HMM (Rabiner, 1989) is a finite set of
states; each state is linked with a probability distribu-
tion. Transitions among these states are governed by a
set of probabilities called transition probabilities. In a
particular state a possible outcome or observation can
be generated, according to the associated observation
probability distribution. It is only the outcome, not the
state that is visible to an external observer and there-
fore states are “hidden” to the outside, hence the name
Hidden Markov Model. In earlier exploratory stud-
ies the HMM has shown good results thanks to their
suitability to model sequential data, which is the case
for monitoring human activities. Indeed, acceleration
data are measured over time during physical human
activities of a person and are therefore sequential over
time. In (Coppola et al., 2016) an approach to activity
recognition for indoor environments based on incre-
mental modelling of long-term spatial and temporal
context is presented. Even in (Coppola et al., 2015)
the authors introduced a simple way to apply qualita-
tive trajectory calculus to model 3D movements of the
tracked human body using HMMs. HMMs combined
with Gaussian Mixture Models (GMM) to model the
combination of continuous joint positions over time
for activity recognition was introduced in (Piyathilaka
and Kodagoda, 2015).
In this paper, a method for ADLs recognition is
proposed. In particular, we focus on using the HMM
to facilitate the detection of anomalous sequences in
a classical action sequence such as making a coffee.
3 DESIGN OF HMM STRUCTURE
Let X = {x
1
, x
2
, . . . , x
n
} be a discrete finite activity
space and O = {o
1
, o
2
, . . . , o
m
} the observation space
of a Hidden Markov Model (HMM) (Rabiner, 1989).
Let T be the transition matrix of this HMM, with T
x,y
representing the probability of transitioning from ac-
tivity x ∈ X to activity y ∈ X, and p
x
(o) be the emis-
sion probability of observation o ∈ O in activity x ∈ X .
We denote the probability that HMM trajectory
follows the activity sequence s given the sequence of
n observations, as:
P(X
1:n
∈ seq
n
(s)|o
1:n
)
where seq
n
(s) is a set of all length n trajectories whose
duration free sequence equals to s.
Finding the most probable activity sequence can
be seen as a search problem that requires evaluation
of probabilities of activity sequences. The Viterbi al-
gorithm based on dynamic programming can be used
to efficiently find the most probable trajectory. In fact,
it makes use of the Markov property of an HMM (that
the next state transition and symbol emission depend
only upon the current state) to determine, in linear
time with respect to the length of the emission se-
quence, the most likely path through the states of a
model which might have generated a given sequence.
3.1 Head and Hands Detection
Algorithms
The main goal of this work is to classify different ac-
tivities that people carry out during their daily life us-
ing an RGB-D camera in a top-view configuration.
The idea is to extract from depth information the 3D
position of the person for each frame. In particular,
using the multi-level segmentation algorithm in (Li-
ciotti et al., 2014), we can track the head and the
hands of each person when these are visible. In fact,
this algorithm intends to overcome the limitations of
the single-level segmentation in the case of collisions
among people in the same scene.
The multi-level segmentation algorithm is based
on the idea that, normally, people head is on the
higher level than the rest of the body. Thus, we can
detect a person starting from its head. The minimum
point of the blob that identifies a person, which is ex-
tracted from the depth image, corresponds to the head
top point. When there is only one person in the scene,
HMM-based Activity Recognition with a Ceiling RGB-D Camera
569
the problem can be reduced to find the global min-
imum of the whole depth image. On the contrary,
when more than one person is in the scene, we have
to consider all the local minima. In fact, in case of
collision, two people become a single blob and using
binary segmentation it is not possible to recognise the
two heads.
To solve this problem, we propose an algorithm
that iterates the binary segmentation considering de-
creasing values of thresholds, until we obtain people
profiles. Starting from the top-view, a set of contour
levels is identified. For each level, the minimum point
is stored and if a new local minimum higher than the
previously stored is found, it will be added as the head
point. When the loop ends, all the heads detected in
the scene are recognised.
In a similar way, to find the hands 3D position, we
apply again this algorithm to each person blob leaving
out the upper part of person profile (head and shoul-
ders) previously found.
3.2 ADLs Model
In this section, an ADLs model is described. It takes
into account both the complexity of our data and the
lack of a large amount of training data for learning
purposes. If we abstract our problem of recognition
of daily activities in the image to its simplest core, we
can notice an equivalence between an activity and a
hidden state of an HMM. This could be obtained with
the design of a fully connected HMM and training the
inherent state-transition probabilities from the labeled
data. Regarding these ADLs as very heterogeneous
and complex, the suggested equivalence between an
activity and a hidden state cannot hold.
Information provided by head and hands detection
algorithms can be used as input for a set of HMMs.
Each of these recognise different actions sequence.
After training the model, we consider an action se-
quence s = {s
1
, s
2
, . . . , s
n
} and calculate its probabil-
ity λ for the observation sequence P(s|λ). Then we
classify the action as the one which has the largest
posterior probability.
Activity
1
Activity
2
Activity
3
Activity
n
3D Head
Point
3D Hand
Point
HMM
1
HMM
2
HMM
3
Activity
1
Activity
2
Activity
3
Activity
n
...
3D Head
Point
3D Hand
Point
HMM
1
HMM
2
HMM
3
...
Observations (O)
Classification
Select model with
Maximum
Likehood
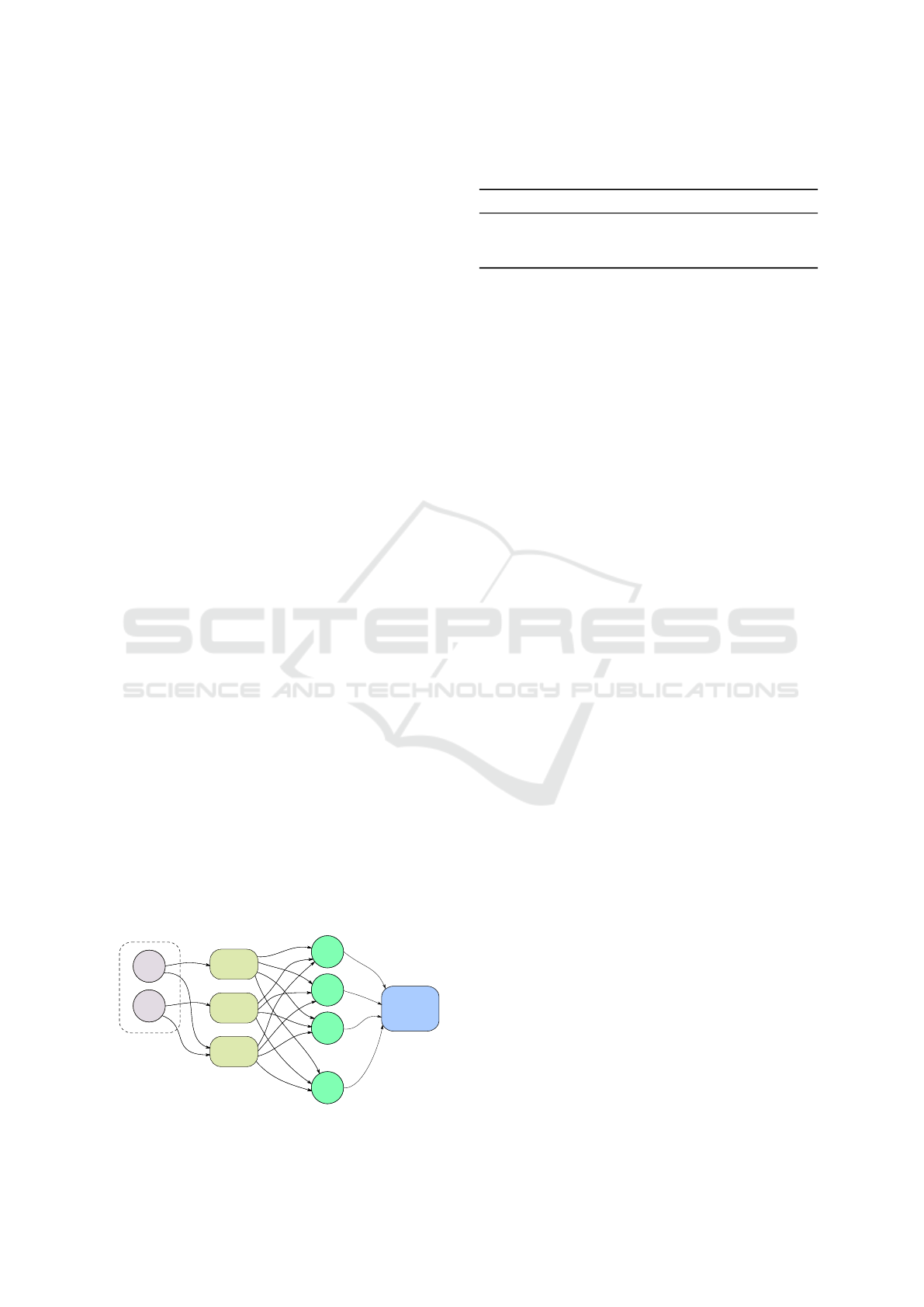
Figure 1: Block diagram of the recognition process.
Table 1: Number of observations for each HMMs (v: verti-
cal layer, h: horizontal layer).
3D Points # layers # observations
head v : 8, h : 8 512
hands v : 8, h : 8 512
head & hands v : 8, h : 8; v : 8, h : 8 262144
Figure 1 depicts the general scheme of the recog-
nition process. In particular, we used three different
HMMs, which have as observations 3D points of:
• the head (HMM
1
);
• the hands (HMM
2
);
• both head and hands together (HMM
3
).
Table 1 indicates the number of vertical and horizon-
tal layers used in the quantization step for each HMM
and the total number of observations, after the resam-
pling process.
Our set of actions includes:
• making a coffee;
• taking the kettle;
• making tea or taking sugar;
• opening the fridge;
• other activities performed in a kitchen environ-
ment.
Finally, the classification module provides the ac-
tion x
j
that maximizes P
HMM
i
. It is the HMM trajec-
tory probability that follows the activity sequence s
given the sequence of n observations, i.e.:
x
j
= argmax
i
P
HMM
i
(X
1:n
∈ seq
n
(s)|o
1:n
) (1)
4 SETUP AND ACQUISITION
To evaluate the usefulness of our approach for activ-
ity recognition, we built a new dataset. The RADiAL
dataset contains common daily activities such as mak-
ing coffee, making tea, opening the fridge and using
the kettle. The data were collected over a period of 5
days.
RADiAL also consists of random activities of
each individual that can be performed in a kitchen en-
vironment, which are not similar to any other activity
done before. The RGB-D camera was installed on
the ceiling of L-CAS laboratory at approximately 4m
above the floor. The camera was positioned above the
surface which has to be analysed (Figure 3).
We chose an Asus Xtion Pro Live RGB-D camera
for acquiring colour and depth information in an af-
fordable and fast way. A mini PC for elaborating and
storing the 3D points and colour frames was used.
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
570

(a) (b) (c) (d)
Figure 2: Snapshots of RADiAL session registration.
fridge
tea
sugar
kettle
coffee
machine
RGB-D
Camera
Figure 3: Reconstructed layout of the kitchenette where
RGB-D camera is installed.
4.1 RADiAL Dataset
The RADiAL dataset
1
was collected in an open-plan
office of the Lincoln Centre for Autonomous Sys-
tems (L-CAS). The office consists of a kitchenette,
resting area, lounge and 20 working places that are
occupied by students and postdoctoral researchers.
We installed a ceiling RGB-D camera (Figure 3) that
took a snapshot (with dimensions of 320 × 240 pix-
els, Figure 2) of the kitchenette area every second for
5 days, and we hand-annotated activities of one of
the researchers over time. Furthermore, the RADiAL
dataset contains the 3D positions of the head and
hands for each person with a minute-by-minute time-
line of 5 different activities performed at the kitchen
over the course of days. RADiAL contains 100 trials.
Each trial includes the actions related to one person.
5 EXPERIMENTAL RESULTS
In this section we present the experimental results ob-
tained using our approach. An architecture to imple-
ment HMMs ADLs recognition is proposed. The ar-
chitecture uses the 3D points extracted from the head
and hands to classify different sequences of actions
1
http://vrai.dii.univpm.it/radial-dataset
corresponding to some ADLs.
The standard algorithm for HMM training is the
forward-backward, or Baum-Welch algorithm (Baum,
1972). Baum-Welch is an iterative algorithm that uses
an iterative expectation/maximization process to find
an HMM which is a local maximum in its likelihood
to have generated a set of training observation se-
quences. This step is needed because the state paths
are hidden, and the equations cannot be solved ana-
lytically.
In this study, the BaumWelch algorithm was em-
ployed to estimate a transition probability matrix and
an observation emission matrix so that the model best
fits the training dataset.
Since the discrete observation density is used
in implementing HMMs, a Vector Quantization and
clustering step is required to map the continuous ob-
servation in order to convert continuous data to dis-
crete data.
A total of five models of activities were built using
the method described in Subsection 3.2. The mod-
els were used to recognize activities in the RADiAL
dataset. The five models correspond respectively to
the activities “Other” (this action contains all the other
activities perfomed in a kitchen environment), “Cof-
fee” (making a coffee), “Kettle” (taking the kettle),
“tea/sugar” (making tea or taking sugar), and “fridge”
(opening the fridge). The results were obtained using
two different validation techniques.
Below, the results are given at first for the head
only (HMM
1
), then the hands (HMM
2
) and finally,
the combination of both (HMM
3
). The main goal is
to gradually improve the activities recognition.
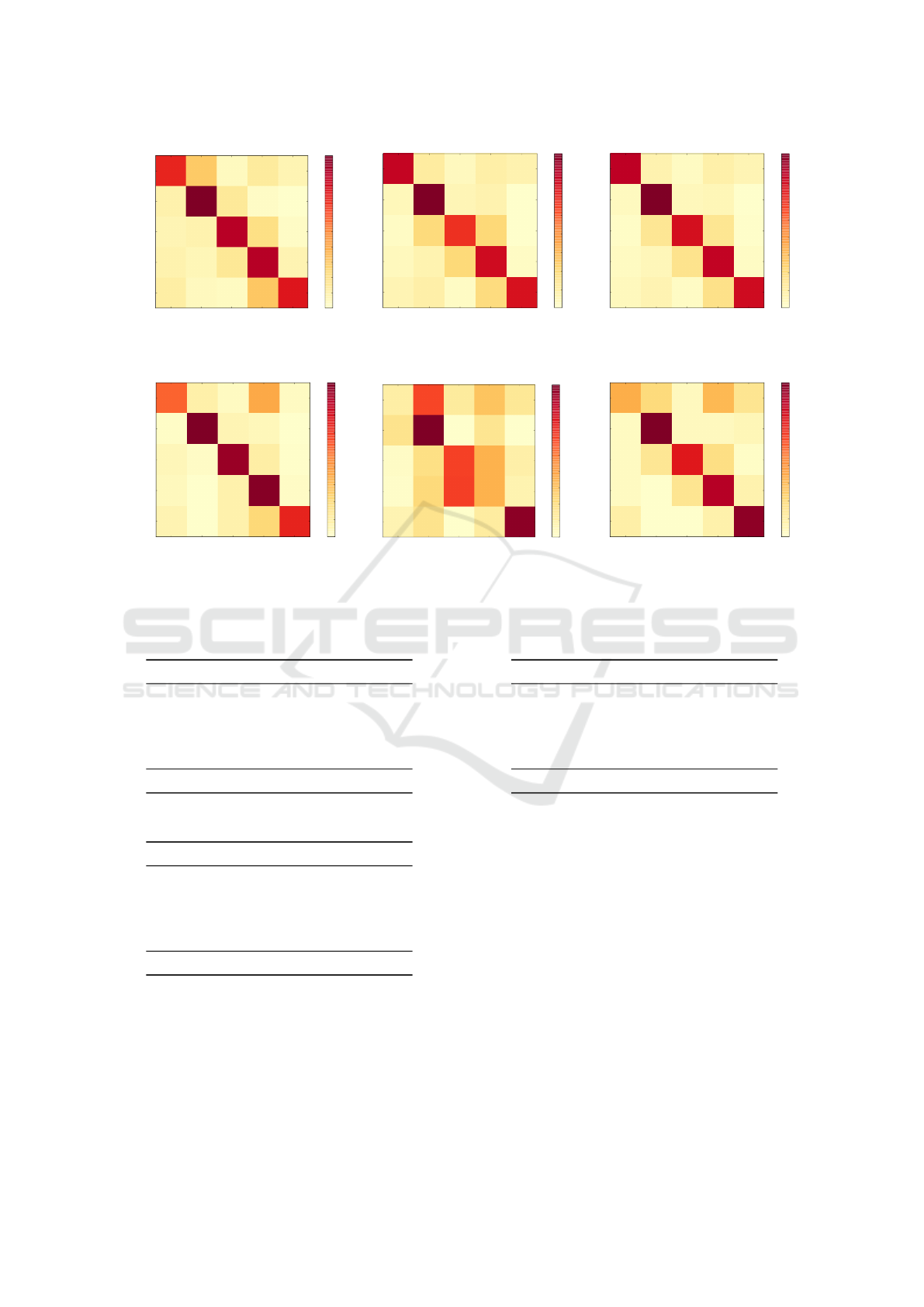
In the first case we applied a k-fold cross-
validation approach (with k = 5) to test our HMM
1
.
The resulting confusion matrix is shown in Fig-
ure 4(a). As we can see in the confusion matrix
most of the actions are detected with high accuracy.
Table 2 summarises the activity recognition results
demonstrating the effectiveness and suitability of our
approach.
The confusion matrix for HMM
2
is depicted in
Figure 4(b). The activity recognition results, as re-
ported in Table 3, prove the effectiveness and suit-
HMM-based Activity Recognition with a Ceiling RGB-D Camera
571
other
coffee
kettle
tea/sugar
fridge
Predicted label
other
coffee
kettle
tea/sugar
fridge
True label
0.574 0.236 0.029 0.105 0.056
0.072 0.797 0.114 0.015 0.002
0.053 0.070 0.701 0.161 0.015
0.069 0.048 0.121 0.704 0.058
0.091 0.033 0.025 0.243 0.609
0.08
0.16
0.24
0.32
0.40
0.48
0.56
0.64
0.72
(a) HMM
1
other
coffee
kettle
tea/sugar
fridge
Predicted label
other
coffee
kettle
tea/sugar
fridge
True label
0.704 0.106 0.032 0.089 0.068
0.045 0.831 0.052 0.070 0.003
0.020 0.194 0.579 0.202 0.006
0.036 0.067 0.198 0.678 0.021
0.056 0.084 0.022 0.184 0.654
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
(b) HMM
2
other
coffee
kettle
tea/sugar
fridge
Predicted label
other
coffee
kettle
tea/sugar
fridge
True label
0.759 0.073 0.024 0.087 0.058
0.031 0.875 0.041 0.052 0.002
0.014 0.139 0.696 0.143 0.007
0.027 0.047 0.156 0.748 0.021
0.036 0.063 0.019 0.168 0.713
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
(c) HMM
3
Figure 4: k-fold cross-validation confusion matrices.
other
coffee
kettle
tea/sugar
fridge
Predicted label
other
coffee
kettle
tea/sugar
fridge
True label
0.515 0.084 0.025 0.354 0.021
0.012 0.886 0.058 0.044 0.000
0.048 0.016 0.835 0.097 0.004
0.036 0.000 0.077 0.871 0.016
0.064 0.000 0.077 0.215 0.644
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
(a) HMM
1
other
coffee
kettle
tea/sugar
fridge
Predicted label
other
coffee
kettle
tea/sugar
fridge
True label
0.079 0.478 0.097 0.234 0.113
0.133 0.744 0.001 0.122 0.000
0.013 0.150 0.487 0.275 0.075
0.009 0.172 0.489 0.275 0.056
0.054 0.133 0.000 0.092 0.721
0.00
0.08
0.16
0.24
0.32
0.40
0.48
0.56
0.64
0.72
(b) HMM
2
other
coffee
kettle
tea/sugar
fridge
Predicted label
other
coffee
kettle
tea/sugar
fridge
True label
0.331 0.197 0.031 0.299 0.142
0.025 0.859 0.034 0.032 0.050
0.025 0.138 0.650 0.175 0.013
0.025 0.000 0.141 0.761 0.073
0.090 0.000 0.000 0.079 0.831
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
(c) HMM
3
Figure 5: Confusion matrices after splitted dataset in two parts: 80 trials are used to train the model, the other 20 are used to
test it.
Table 2: Classification Results Cross Validation HMM
1
.
precision recall f1-score
other 0.73 0.57 0.64
coffee 0.67 0.80 0.73
kettle 0.60 0.70 0.65
tea/sugar 0.66 0.70 0.68
fridge 0.74 0.61 0.67
avg / total 0.68 0.68 0.68
Table 3: Classification Results Cross Validation HMM
2
.
precision recall f1-score
other 0.89 0.70 0.79
coffee 0.69 0.83 0.75
kettle 0.47 0.58 0.52
tea/sugar 0.64 0.68 0.66
fridge 0.74 0.65 0.69
avg / total 0.73 0.71 0.71
ability in terms of precision, recall and f1-score.
The confusion matrix of HMM
3
for both the head
and hands is shown in Figure 4(c). The results in Ta-
ble 4 indicate an increase in the metrics for evaluating
the performance of our approach.
In the second case, in order to demonstrate the
suitability of this approach in a blind test, we split the
Table 4: Classification Results Cross Validation HMM
3
.
precision recall f1-score
other 0.93 0.76 0.84
coffee 0.76 0.87 0.81
kettle 0.58 0.70 0.63
tea/sugar 0.70 0.75 0.72
fridge 0.78 0.71 0.74
avg / total 0.78 0.77 0.77
dataset into two parts: 80 trials were used to train the
model, the other 20 were used to test it. The aim of
this experiment is to understand how our HMMs pre-
dict some activities. The main classification metrics
precision, recall, f1-score and support are employed
to evaluate the quality of predictions of our model.
The results are reported in Tables 5 to 7.
Table 5 indicates the performance of the HMM
1
designed for the head. The confusion matrix for
HMM
1
is also depicted in Figure 5(a). The activ-
ity recognition results of the overall activities demon-
strate the effectiveness and suitability of our ap-
proach.
Table 6 shows classification results of the HMM
2
designed for the hands. Classification metrics taken
in exam overall decrease in performance, but there is
an increase of the accuracy for the action “open the
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
572
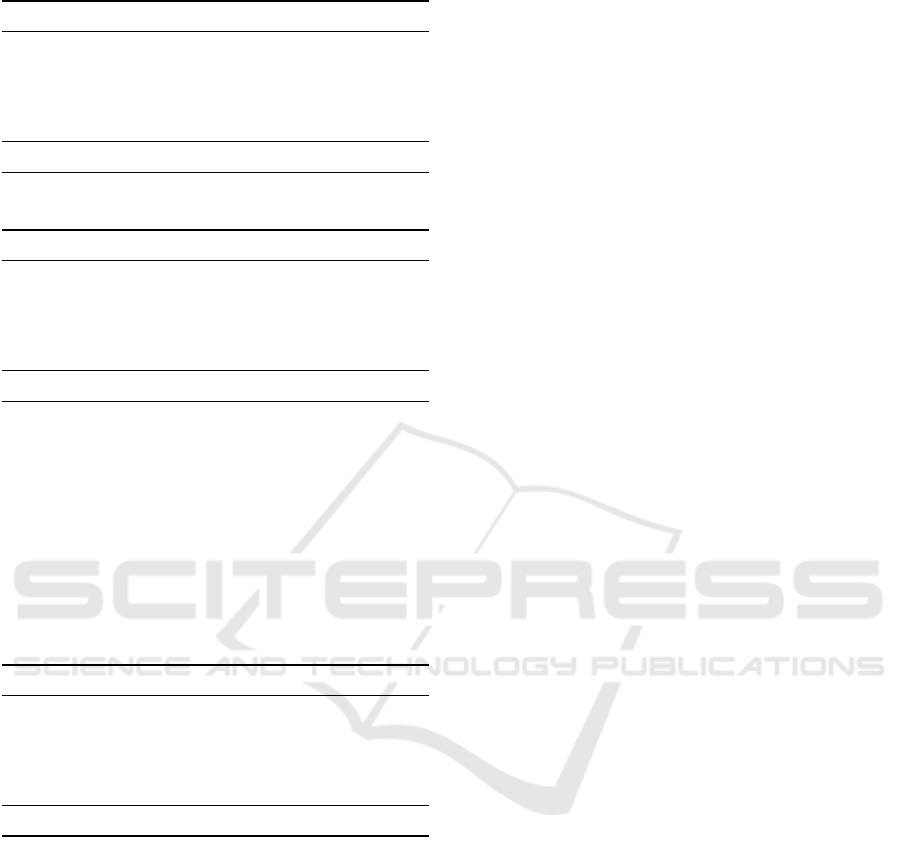
Table 5: Classification Results HMM
1
.
precision recall f1-score support
other 0.68 0.51 0.59 237
coffee 0.96 0.89 0.92 589
kettle 0.66 0.83 0.74 248
tea/sugar 0.75 0.87 0.81 636
fridge 0.90 0.64 0.75 233
avg / total 0.81 0.80 0.80 1943
Table 6: Classification Results HMM
2
.
precision recall f1-score support
other 0.15 0.08 0.10 381
coffee 0.55 0.74 0.63 925
kettle 0.04 0.49 0.08 80
tea/sugar 0.63 0.27 0.38 1741
fridge 0.73 0.72 0.73 556
avg / total 0.56 0.44 0.46 3683
fridge”. Probably, this is because the test set is not
balanced. The confusion matrix for HMM
2
is also
depicted in Figure 5(b).
Table 7 shows classification results of the HMM
3
designed for both head and hands. Results in terms of
precision are interesting. In fact, for some activities
the precision is increased. The confusion matrix for
HMM
3
is also shown in Figure 5(c).
Table 7: Classification Results HMM
3
.
precision recall f1-score support
other 0.52 0.33 0.40 381
coffee 0.90 0.86 0.88 925
kettle 0.15 0.65 0.25 80
tea/sugar 0.87 0.76 0.81 1741
fridge 0.67 0.83 0.74 556
avg / total 0.79 0.75 0.76 3683
6 CONCLUSION
In this paper, we propose an automated RGB-D video
analysis system that recognises human ADLs, related
to classical daily actions that a person performs in the
kitchen.
RADiAL, a dataset with RGB-D images and 3D
position of each person for training as well as evalu-
ating HMM, has been developed and made publicly
available.
Action sequence recognition is then handled using
a discriminative HMM. In particular, three different
HMMs are used, which have as observations the 3D
points of the head, hands and both together.
We conducted an evaluation of the performance
of our approach on 5 activities performed in the RA-
DiAL dataset. The experimental results demonstrate
the effectiveness and suitability of our model that
achieves high accuracy and performs well, without
having to rely on the data annotation required in the
other existing approaches.
Further investigation will be devoted to extend our
approach to select human joints that provide the most
informative spatio-temporal relations for ADLs clas-
sification.
Future work includes performing the acquisition
by other more accurate RGB-D cameras, such as a
TOF camera.
Moreover, it would be interesting to evaluate both
color and depth images in a way that does not de-
crease the performance of the system when the color
image is being affected by changes in pose and/or il-
lumination.
In the field of assistive technology, the long term
goal of this work is to develop a mobile robot that
searches for the best location to observe and success-
fully recognise ADLs in domestic environments.
ACKNOWLEDGEMENTS
The authors would like to thank L-CAS Team for the
support during the dataset video acquisition.
REFERENCES
Ali, R., ElHelw, M., Atallah, L., Lo, B., and Yang, G.-
Z. (2008). Pattern mining for routine behaviour
discovery in pervasive healthcare environments. In
2008 International Conference on Information Tech-
nology and Applications in Biomedicine, pages 241–
244. IEEE.
Baum, L. E. (1972). An equality and associated maximiza-
tion technique in statistical estimation for probabilistic
functions of markov processes. Inequalities, 3:1–8.
Bodor, R., Jackson, B., and Papanikolopoulos, N. (2003).
Vision-based human tracking and activity recognition.
In Proc. of the 11th Mediterranean Conf. on Control
and Automation, volume 1. Citeseer.
Coppola, C., Krajnık, T., Duckett, T., and Bellotto, N.
(2016). Learning temporal context for activity recog-
nition. In ECAI 2016: 22nd European Conference on
Artificial Intelligence, 29 August-2 September 2016,
The Hague, The Netherlands-Including Prestigious
Applications of Artificial Intelligence (PAIS 2016),
volume 285, page 107. IOS Press.
Coppola, C., Martinez Mozos, O., Bellotto, N., et al. (2015).
Applying a 3d qualitative trajectory calculus to human
action recognition using depth cameras. In IEEE/RSJ
HMM-based Activity Recognition with a Ceiling RGB-D Camera
573

IROS Workshop on Assistance and Service Robotics in
a Human Environment.
Dartigues, J. (2005). [methodological problems in clini-
cal and epidemiological research on ageing]. Revue
d’
´
epid
´
emiologie et de sant
´
e publique, 53(3):243–249.
Gupta, A., Srinivasan, P., Shi, J., and Davis, L. S. (2009).
Understanding videos, constructing plots learning a
visually grounded storyline model from annotated
videos. In Computer Vision and Pattern Recognition,
2009. CVPR 2009. IEEE Conference on, pages 2012–
2019. IEEE.
Hasan, M. and Roy-Chowdhury, A. K. (2015). A continu-
ous learning framework for activity recognition using
deep hybrid feature models. IEEE Transactions on
Multimedia, 17(11):1909–1922.
Hoai, M. and De la Torre, F. (2014). Max-margin early
event detectors. International Journal of Computer
Vision, 107(2):191–202.
Jiang, Y. and Saxena, A. (2013). Infinite latent conditional
random fields for modeling environments through hu-
mans. In Robotics: Science and Systems.
Koppula, H. S., Gupta, R., and Saxena, A. (2013). Learn-
ing human activities and object affordances from rgb-
d videos. The International Journal of Robotics Re-
search, 32(8):951–970.
Liciotti, D., Contigiani, M., Frontoni, E., Mancini, A., Zin-
garetti, P., and Placidi, V. (2014). Shopper analytics:
a customer activity recognition system using a dis-
tributed rgb-d camera network. In International Work-
shop on Video Analytics for Audience Measurement in
Retail and Digital Signage, pages 146–157. Springer
International Publishing.
Liciotti, D., Massi, G., Frontoni, E., Mancini, A., and Zin-
garetti, P. (2015). Human activity analysis for in-home
fall risk assessment. In 2015 IEEE International Con-
ference on Communication Workshop (ICCW), pages
284–289. IEEE.
Liu, J., Ali, S., and Shah, M. (2008). Recognizing human
actions using multiple features. In Computer Vision
and Pattern Recognition, 2008. CVPR 2008. IEEE
Conference on, pages 1–8. IEEE.
Maji, S., Bourdev, L., and Malik, J. (2011). Action recog-
nition from a distributed representation of pose and
appearance. In Computer Vision and Pattern Recogni-
tion (CVPR), 2011 IEEE Conference on, pages 3177–
3184. IEEE.
Nait-Charif, H. and McKenna, S. J. (2004). Activity sum-
marisation and fall detection in a supportive home en-
vironment. In Pattern Recognition, 2004. ICPR 2004.
Proceedings of the 17th International Conference on,
volume 4, pages 323–326. IEEE.
Ning, H., Han, T. X., Walther, D. B., Liu, M., and Huang,
T. S. (2009). Hierarchical space-time model enabling
efficient search for human actions. IEEE Transac-
tions on Circuits and Systems for Video Technology,
19(6):808–820.
Oliver, N. and Horvitz, E. (2005). A comparison of hmms
and dynamic bayesian networks for recognizing office
activities. In International conference on user model-
ing, pages 199–209. Springer.
Pirsiavash, H. and Ramanan, D. (2012). Detecting activities
of daily living in first-person camera views. In Com-
puter Vision and Pattern Recognition (CVPR), 2012
IEEE Conference on, pages 2847–2854. IEEE.
Piyathilaka, L. and Kodagoda, S. (2015). Human activity
recognition for domestic robots. In Field and Service
Robotics, pages 395–408. Springer.
Prest, A., Schmid, C., and Ferrari, V. (2012). Weakly su-
pervised learning of interactions between humans and
objects. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 34(3):601–614.
Rabiner, L. R. (1989). A tutorial on hidden markov models
and selected applications in speech recognition. Pro-
ceedings of the IEEE, 77(2):257–286.
Rashidi, P. and Cook, D. J. (2010). An adaptive sensor
mining framework for pervasive computing applica-
tions. In Knowledge Discovery from Sensor Data,
pages 154–174. Springer.
Ryoo, M. S. (2011). Human activity prediction: Early
recognition of ongoing activities from streaming
videos. In 2011 International Conference on Com-
puter Vision, pages 1036–1043. IEEE.
Sturari, M., Liciotti, D., Pierdicca, R., Frontoni, E.,
Mancini, A., Contigiani, M., and Zingaretti, P. (2016).
Robust and affordable retail customer profiling by vi-
sion and radio beacon sensor fusion. Pattern Recogni-
tion Letters.
Sung, J., Ponce, C., Selman, B., and Saxena, A. (2011).
Human activity detection from rgbd images. plan, ac-
tivity, and intent recognition, 64.
Wu, J., Osuntogun, A., Choudhury, T., Philipose, M., and
Rehg, J. M. (2007). A scalable approach to activity
recognition based on object use. In 2007 IEEE 11th
International Conference on Computer Vision, pages
1–8. IEEE.
ICPRAM 2017 - 6th International Conference on Pattern Recognition Applications and Methods
574
