
Agent-based Semantic Negotiation Protocol for Semantic Heterogeneity
Solving in Multi-agent System
Dhouha Ben Noureddine
1,2
, Atef Gharbi
1
and Samir Ben Ahmed
2
1
LISI, National Institute of Applied Sciences and Technology, INSAT, University of Carthage, Tunis, Tunisia
2
FST, University of El Manar, Tunis, Tunisia
Keywords:
Multi-agent System, Ontology, Semantic Heterogeneity, Semantic Negotiation Protocol, Ontology Alignment.
Abstract:
In this article, we propose an interactive agent model in an open and heterogeneous multi-agent system (MAS).
Our model allows agents to autonomously communicate between each other through semantic heterogeneity.
The communication problem can be expressed by the calculation based on the abilities acquired in the recei-
ver agent, compared to the message sent by the sender agent. Hence, the semantic heterogeneity should be
resolved in the message processing. The agent can autonomously enrich its own ontology by using semantic
negotiation approach in several steps. We develop firstly, a model using an ontology alignment framework.
Then, we enhance a similarity measure to select the most similar pairs by combining a psychological know-
ledge of the relevance, the resemblance, and the non-symmetry of similarit y. At the end, we suggest a protocol
for supporting semantic negotiation. In order to explain our approach, we implement a simple benchmark pro-
duction system on JADE.
1 INTRODUCTION
In a MAS, agents are required to communicate to
solve tasks and accomplish their goals that are assig-
ned. The features and behavior of agents make the
system comply with a set of external constraints on
the system. An open MAS means that new agents
enter the system and bring with them new features,
and oth er age nts take with them when they go ou t of
the system the capabilities req uired by MAS, making
these actions not known as a p riori by other agents of
the sy stem.
Therefore, in the communication phase, the receiver
agent handling different data models should under-
stand formulated demands from another sema ntically
heteroge neous sender agent. The problem of ma-
naging heterogeneity among various information re-
sources is increasing in the interactive MAS r equiring
the adap ta tion to communication pr otocols. A stan-
dard approach to the resulting problem lies in the use
of ontologies for data descr iption. As a consequence,
various so lutions have been proposed to facilitate de-
aling with this situation.
That leads us to propose a reflec tive age nt model to
solve the semantic heterogeneity problem using two
techniques: the calculation of similarity mea sure and
the sema ntic negotiation protocol. Our agents are
communicating with each other, when an age nt asks
another agent about his capab ilities, it will be able to
understand the answer from the definitions of the sy-
stem. In our approach, each agen t must have its own
ontology in which it’s defined.
In this paper we focus on a kind of semantic techno-
logies, named ontology alignment. It is supposed to
be accessible by agents and proposed by (Shvaiko and
Euzenat, 20 13). As the alignment between ontolog ie s
is incomplete, agents must then treat queries inclu-
ding non -defined terms in their respe ctive ontolo gies,
and the semantic h eterogeneity should be resolved in
the message proc essing. So, solving this problem are
no longer in alignmen t level, it’s nece ssary to define
a higher level of messages interp retation and appro-
priate communication protocols mechanism. Once
the translation is done, the receiver ag ent evaluate the
understanding degree of the tr anslated query using a
thresholds system such as those de fined by (Maes,
1994). Th is a ssessment fo cuses on the reflection thin-
king capabilities of agents to be able to analyse their
own code and to be conscious of the capabilities they
have at a given time.
Not to forget that our ag ent model is based on se-
mantic negotiation technique of (Morge and Rou-
tier, 2007), our protoco l can be seen as an extension
of Founda tion for I ntelligent Physical Agents FIPA-
Noureddine, D., Gharbi, A. and Ahmed, S.
Agent-based Semantic Negotiation Protocol for Semantic Heterogeneity Solving in Multi-agent System.
DOI: 10.5220/0006344602470254
In Proceedings of the 12th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2017), pages 247-254
ISBN: 978-989-758-250-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
247

request
1
. In fact, in a semantic negotiation context we
have situations similar to those of the human discussi-
ons, where huma n beings try to solve those situations
in which the involved terms are not mutually u nder-
standable, by negotiating the semantics of these terms
(Comi et al., 2015).
This paper introduces a simple benchmark production
system that will be used throughout this article to il-
lustrate our contribution which is developed as r obot-
based application. We implement the benchmark pro-
duction system in a free platform which is JADE
(JavaTM Agent DEvelopment)
2
Framework (Belli-
femine et al., 2007). JADE is a platform to deve-
lop MAS in compliance with the FIPA specifications
(Salvatore and Vincenzo, 2009), (Chuan-Jun, 2 011),
(Bordini, 2006).
The remainder of this paper is organized as follows:
we present in the section 2 our agent model, we des-
cribe the ontology model, the alignment service used
and our semantic similarity measure. Section 3 outli-
nes the negotiation strategy, the spe ech acts in FIPA -
ACL a nd the communication protocol. A benchmark
is used to explain the message exchange between
agents to clarify our contribution in section 4. Sec tion
5 provides the major conclusion.
2 AGENT REPRESENTATION
It is a reflective agent model in an open and hete-
rogene ous MAS a llowing dynamic in teracting in an
environment during run-time. Our model is able to
modify messages at the run-time in th e co mmunica-
tion phase, and the age nt is able to produce the list
of those capa bilities at the current time. In th is con-
text, when an agent A wants to c ommunicate with an
agent B, it will use its own ontology to build its mes-
sages, B will receive a formulated message compati-
ble with the terms of agen t’s A on tology, which does
not allow him to interpret this message. In fact, af-
ter re ceiving the message from A, B compares the re-
quest received with its own capacities at the current
time. We use a s tec hnique: the similarity measure
proposed by (Shvaiko and Euzenat, 201 3) to calcu-
late if two conc epts are semantically similar, i.e., they
share common proper ties and attributes, the interest
of this measure is the leveraging o f all o ntologies as-
pects and holding the maximum similarity. It there-
fore offers immediately a secure basis for a distance
measure. We imp rove this measure by optimizing it
as an asymmetric similarity in order to enhance the
1
http://www.fipa.org/specs/fipa00026/SC00026H.html
2
http://jade.tilab.com/
performance of capturing human judgements and pro-
duce b e tter n earest neighbors.
To make a n agent reflective, we need to represen t the
agent’s state during its own execution a nd manipulate
it. To do so, we adopt the Alignment API
3
of (Da-
vid et al., 20 11) to align ontologies. The API imple-
mentation itself carries little overhead: alignments of
thousands of terms (from large thesauri) are been able
to be handled without a slack manner. Furthermore,
the API is used to deal with instances of larger onto-
logies. The primary purpose of this API is that it may
be used as a specific tool based directly on seco ndary
memory storage and indexing for dealing with instan-
ces and dropping that support fro m the API.
We work on an alignment in semantic heterogeneous
environment and we completely neglect the problem
of syntactical, terminological and lexical heteroge-
neity. We assume that all agents use the same syntax
for messages.
In this section, we will present our ontology model,
then we will describe the alig nment API u sed an d its
role for our agent model.
2.1 Ontology Model
An onto logy O is described forma lly as a 6-tuple:
{C, P, H
c
, H
p
, A, I } where C a set of concepts,
P a set of pr operties, H
c
a set of hierarchical relati-
onships between concepts an d sub-concepts, H
p
a set
of hierarchical relations betwe e n properties and su b-
properties, A a set of axioms and I a set of instances
of concepts C and of properties P.
2.2 Ontology Alignment API
The ontology alignment requests the semantic simila-
rity measur e of the ontologies’ concepts and the alig-
nments among them. It aims to identify concepts that
can be considered similar, regardless the use of the
type of alignment: it can include tasks like queries in-
terpreting, translation of messages or obtaining pas-
sage axioms between two ontologies.
The ontology alignme nt problem can be descr ibed in
one sentence as defined (David et al., 2011): “Given
two ontologies O
A
and O
B
each describing a set of
discrete entities (which can be c la sses, properties, ru-
les, predicates, etc.), find the relationships (e.g., equi-
valence or subsumption) holding between these en-
tities.” In the API description, (David et al., 2011)
defined other para meters such as the alignment level,
the arity and the set of co rrespondences.
3
is a Java API for manipulating alignments i n the alig-
nment format and EDOAL (Expressive and D eclarative On-
tology Alignment Language).
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
248

We can define the ontology alig nment between two
concepts of two different ontologies O
A
and O
B
as a
4-tuple align = {e
1
, e
2
, n, R }:
• e
1
an e ntity (c la ss, relationship or instance) of the
ontology O
A
that should be aligned (e
1
∈ O
A
);
• e
2
an e ntity (c la ss, relationship or instance) of the
ontology O
B
that should be aligned (e
2
∈ O
B
);
• R the correspondence relationship (e.g. equiva-
lence, etc.) between e
1
and e
1
;
• n ∈ [0, 1] is the validity degree of th is corr espon-
dence.
We integrate the Alignment API (David et al., 2011)
in our model to ease our contribution. In the balance
of this article, we w ill note P(S) the set of subsets S.
We define M (O
A
, O
B
) the set of mappings between
the ontology O
A
and ontology O
B
. By exten sio n, if S
is a set of entities (class, relatio nship or instance) of
the ontology O
A
, then we define M (S, O
B
) the set of
mappings c orrespon ding to entities S of ontology O
A
in ontology O
B
.
2.3 Translation Data
In order to use an ontology instead of another, we
must find it first. A translation program must allow a n
agent to locally transform a message expr essed as a
function of an ontology O
A
to a new message expres-
sed according to an ontology O
B
. That means, when
an agent A sends a request to an agent B, B must first
translate the request with its own capacity existing in
its ontology O
B
. We choose to consider ( work ( La-
era et al., 2007)) that MAS has acc e ss to an ontology
alignment service (subsection 2.2): It should help to
reform ulate the propositional co ntent of message, i.e.,
translate it into terms of another ontology (of the re-
ceiver age nt). In this section, we explain how agent B
uses this ontologies alignment service to translate the
content of the request received from agent A in terms
of its ontology O
B
. We consider S
A
the message sent
by A to B. By nature, S
A
⊂ P(O
A
) (i.e. S
A
is a set
of concepts of ontology A). The alignment service
builds then a set of mappings M (S
A
, O
B
). The set S
B
which is the translation of S
A
in O
B
, is defined as the
set of concepts of O
B
as it exists an alignme nt align ∈
M (S
A
, O
B
) connecting to one of the concepts of S
A
.
2.4 Semantic Similarity Measure
We speak about semantic similarity, when the calcu-
lated measure betwee n two concepts are sem antically
similar, i.e . when they share common properties
and attributes. For example , ”aircraft” and ”car”
are similar because they both have the attributes of
”transporta tion”. Semantic matching score specifies
a similarity function in the form of a seman tic
relation (hypernym, hyponym, meronym, p art-of,
etc) between the intention of the sender agen t’s
message and the concepts of the rece iver agent.
This measure is a real number ∈ [0,1] where 0 (1)
stands for completely different (similar) entities
(Shvaiko and Euzenat, 2013). So, we ca n say that the
approa c h followed here consists of assigning each
entity category, (e.g. a class), to a specific measure
which is defined as a function of the results computed
in the related categories of the entity. We apply this
following equation (1) to compute the similarity
measure between the receiver agent capabilities and
the received query from the sender agent.
sim
c
(A,B) =
∑
(c
1
,c
2
)∈M
(A,B)
(sim
c
(c
1
,c
2
))
max(|A|,|B|)
(1)
Where M
(A,B)
is a mapping from elements of A to
elements of B which maximises Sim
c
(A,B). The
similarity between the sets is the average of the
values of matched pairs. M
(A,B)
is a functio n retur-
ning the set of pairs of concepts resulting from the
possible permutations between A a nd B, for instance,
M({x,y},{1,2,3}) return s the set of permutations
{{x,1}, {x,2},{x, 3},{y,1},{y, 2},{y,3}}.
In the a lignment API (David et al., 2011), the authors
ignore the cognitive sense, for instance if the concepts
have more common attributes, they are more similar,
and if there are more differences, they are less similar
or dissimilar. An important psychological idea is
that the similarity is non-symmetric. Nevertheless,
(Tversky, 1977) proved tha t the similarity measure
between concepts could not be symmetrical, human
judgements have not been too. For example, w e
say more easily “John looks like his father” than
“His father looks like John”, or in the relation is-a:
“a borzoi resembles a carnivore”, than “a carnivore
resembles to a borzoi”. Building on th at, we apply
the best average (BA) approach which doesn’t face
any of the pre-mentioned restraints, and takes into
consideration both similar and dissimilar conce pts as
would be expecte d.
Because of above reasons, we introduce the psycho-
logical theory in our similarity measurement methods
by optimizing the approach of ( Shvaiko and Euzenat,
2013) through ad ding the non-sym metry property of
similarity. To do so, we slightly shift the formulas of
(Euzenat, 2013) to serve our purposes. We combine
the average (obtained through the API) with the BA
one (our upturn), where each average confidence
(similarity measure calculated by (Shvaiko and
Euzenat, 2013)) of the first ontology is paired only
Agent-based Semantic Negotiation Protocol for Semantic Heterogeneity Solving in Multi-agent System
249

with the most similar concept of the second one and
vice-versa. We propose a completely new me thod
for the computation of the similarity measurement,
which has the ability to not ignore the non-symmetry
of similarity, a nd the skill required to generate a best
matching average.
Our approach focuses on the calculation of the
average similarity between each term in O
A
and its
most similar term in O
B
, averaged with its reciprocal
to obtain a symmetric score:
sim
c
(S
1
,S
2
) =
sim
c
(A,B) + sim
c
(B,A)
2
(2)
We define the A(M) ∈ [0,1] the values of a set of
mappings M as the following formula shows:
A(M) =
∑
(c
1
,c
2
,n,R)∈M
n
|M|
(3)
In other words, A(M) represents the average of the
alignment scores involved in th e mapping M. Then,
we consider a measure (score) calculating the score
between two sets of concept S
1
and S
2
as follows:
score(S
1
,S
2
) = ·A(M)sim
c
(S
1
,S
2
) (4)
3 SEMANTIC NEGOTIATION
APPROACH
This section shows a communication between two
agents based on the semantic negotiation. Once the
translation is done, the receiver agent assesses the un-
derstandin g degree of th e translated query using a sy-
stem of thresholds. This assessment is based on the
reflective capabilities of ag ents to be able to analyze
their own codes, to be aware of the capabilities they
have at a given time and to modify their own execu-
tion state or alter their own interpretation or meaning.
Using this lightly understood q uery and the capabili-
ties list of the agent at a given time, the receiver age nt
choose among our five proposed perf ormatives how
to describe its understanding of the order placed in the
receiver agent so that it can, if necessary, reconsider
its request.
3.1 Speech Acts in FIPA-ACL
In the literatur e, the majo rity of researches on seman-
tic heterogeneity perfo rms the calcu la tion of the se-
mantic measu re without using special modeling for
the content of the queries. Some authors measure
the similarity between two concepts of the same onto-
logy, others compute th e similarity betwee n two con-
cepts of different ontologies. But, few authors c a lc u-
late the similarity between two sets of conce pts. The
originality of our approach departed from this ide a to
compute the similarity between sets of concepts (re-
quest, ca pacity) from a concept-to-concept, especially
to calculate the distance between two ontologies to
optimize f uture alignment.
We consider that the message exch a nge describ e d in
the subsection 3.2 uses and respects the identified
message information specified by the control FIPA-
ACL performatives. We can put forward a few hyp ot-
hesis to specify the respon se ID corresponding to the
initial message to avoid any problems linked to mes-
sages intersection. Our protocol can be seen as a
FIPA-request extension that would focus more on not-
understood message s. The content of the performa-
tive will correspond to the classical performatives re-
quest, agree, etc. We will define in de tail in the next
subsection our new proposed performatives for the
application of our communication protocol.
3.2 Communication Model Proposed
The selection of the dynamic p rotocol in open and
heteroge neous MAS for the collaborative tasks exe-
cution during the agents’ communication proves to be
an important step to structure message exchange and
ensure consistency of agents’ be havior in the system.
In order to solve possible understanding problems,
two communicating agen ts need the contribution
of other agents in the system, this is the idea of
some work addressing the semantic negotiatio n in
the literatu re (De Meo et al., 2012) (Garruzzo et al.,
2011) (Garruzzo and Rosaci, 2008) (Me ssina et al.,
2014). We try to use the negotiation strategy to
resolve conflicts between agents.
In this section , we define the role of calculation o f
the score for the selection of candidates’ capa bilities,
and for the communica tion between age nts through
determining the speech acts used in the response
strategy in the work of (Morge and Routier, 2007).
We adopt this approach because, authors assume that
it’s inconceivable to consider as systematically as
possible the ontology a lignment. The main problem
they see that the alignment is unable to guarantee
if it will be correct or complete. Or, if the align-
ment is imperf ect the communication is generally
impossible. So, they thin k that they should deal with
the semantic heterogeneity problem d irectly during
the communication, using a protocol tha t treats
semantic negotiation. The sender agen t (customer)
sends re quests to th e receiver agent (provider). Each
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
250

agent can use a number of performatives (question,
request, assert, propose, refuse, reject, u nknown,
concede, challenge and withdraw) in a c ertain order
(Table 1) to argue his perception of th e world a nd his
personal beliefs. We adopt this negotiation strategy
because it takes into consideration the dynamicity of
interactions a nd cognition of agents.
We consider C
p
the set of capacities of an agent at
a given time and S a set of concepts re presenting a
content of th e message after translation. It’s possible
to build from C
p
, the subset C
p
(S) where C
p
(S)
contains the capacities m a ximizing the score(S,c),
and c ∈ C
p
. To sum up, if a subset of the maximum
capabilities exists give a score result is close to 1,
that means the c a pabilities of this subset are similar
to the query, if the result is close to 0, that means the
request and the current capabilities are different.
We define c
p
= c
p
(S,c) the maximum value of score
result of the su bset C
p
(S). C
p
(S) is defined as follows:
c
p
(S,c) = max
e∈C
p
(S)
score(S,e)|c ∈ C
p
(S) (5)
Reciprocally, we note C
i
the subset of impossible ca-
pabilities where c
i
is the resu lt of the score.
Our protocol is an extension of FIPA-request, we con-
sider here the requesting multi-response persuasion
protocol (defined ReqMultiRe sPersProto) using the
following rules: sr
R/P
, sr
A/W
and sr
A/R
(Morge and
Routier, 2007).
This protocol is determined by a set of sequence ru-
les (see table 1). “Each rule sp ecifies authorized re-
plying moves. Accor ding to the “Request/Propose”
rule (sr
R/P
) is qu ite similar. The heare r of a request
(request(ϕ(x))) is allowed to respond either by asser-
ting an instantiation of this a ssumption (assert(ϕ(a))),
or w ith a plea of ignorance (unknown(ϕ(x))). The
respond can resist or surrender to the previous
speech act.” For example, the “Assert/Welcome”
rule (written sr
A/W
), indica te s that when it sends
an (assert(Φ)), surrendering acts are close to the di-
alogue line. A concession (concede(Φ)) surrenders
to the previous proposition. Resisting acts allow
the discussion; a challenge (challenge(ϕ)) and refuse
(refuse(ϕ)), resist to the previous proposition. In the
“Assert/Reject” (written sr
A/R
) rules, the rejec tion of
one of the assumptions previously asserted (reject(ϕ))
closes the dialogue line. As mentioned in his article
in section 5 , the same argumentative/public seman-
tics are shared between an assertion an d a pro position.
Furthermore, assert(¬ϕ), refuse(ϕ) and reject(ϕ) are
identical. But, the place of speech acts are different in
the sequence of moves.
A strategy is applied to choose which communicative
act to use according to a threshold system ∈ [0,1]
Table 1: Set of speech acts and their potential answers.
(Morge and Routier, 2007).
sequence Speech Resisting Surrendering
rules acts replies replies
sr
R/P
request(ϕ(x)) propose(ϕ(a)) unknown(ϕ)
sr
A/W
assert(Φ) challenge(ϕ), concede(Φ)
refuse(ϕ),
ϕ ∈ Φ
sr
A/R
assert(Φ) challenge(ϕ), concede(Φ)
ϕ ∈ Φ reject(ϕ),
ϕ ∈ Φ
(Maes, 1994). The answer given by o ur system
depends on the results of c
p
and c
i
using c
min
and
c
max
4
. We differentiate 5 different response strategies
for the message of the receiver agent according to
sr
R/P
, sr
A/W
and sr
A/R
rules of (Morge and Routier,
2007).
1. If c
p
≥ c
max
and c
i
≤ c
p
and |C
p
(S)| = 1 , the
request is considered properly understood by th e
agent. We respond by asserting an instantiation of
this assumption (assert(ϕ(a))).
2. If c
min
< c
p
< c
max
and c
p
< c
i
, the receiver
agent believes that the r eceived que ry is not pos-
sible (i.e. c
p
< c
i
s ). So, it sends to the initial
agent a list of closest events possible to the re-
ceived command. For this, we introduce the p er-
formative propose(ϕ(a)) indicating: 1) the initial
message is not executable and 2) that the content
of the message is a set of commands (request) that
are a cceptable and judged to be close to the origi-
nal message.
3. If c
p
≤ c
i
, and (c
max
≤ c
p
, but |C
p
(S)| > 1), and
(c
min
< c
p
< c
max
); then, impossible capa bilities
can be ignored, but the agent is not sure if the re-
quest is understo od (c
p
< c
max
) or that there are
too many can didate queries (|C
p
(S)| > 1). In o t-
her words, the receiver agent has a list of possible
candidate capabilities, but can not proceed with
executions. Hence, the B agent makes a clarifi-
cation request to the agent A by noting the set of
possible capabilities most corresponding to the re-
ceived query (i.e. the receiver agent sends the set
C
p
(S) to the sender agent). That is why, we intro-
duce the act speech (challeng e(ϕ)).
4. If c
p
≤ c
min
and c
min
≤ c
i
, the rec e iver agent
thinks that the order received is understood, but it
is impossible. So, the receiver agent must tell the
sender agent tha t his co mmand is understood, but
is not currently applicable. We introduce to notify
this situation, the performative ((concede (ϕ)).
4
Maes proposed empirically use the values c
min
=0.3 and
c
max
=0.8.
Agent-based Semantic Negotiation Protocol for Semantic Heterogeneity Solving in Multi-agent System
251
5. If c
p
≤ c
min
and c
i
≤ c
min
, the receiver agent is not
able to correctly interpret the request of the sende r
agent. We then introduce the performative refuse.
4 CASE STUDY
4.1 Benchmark Production System
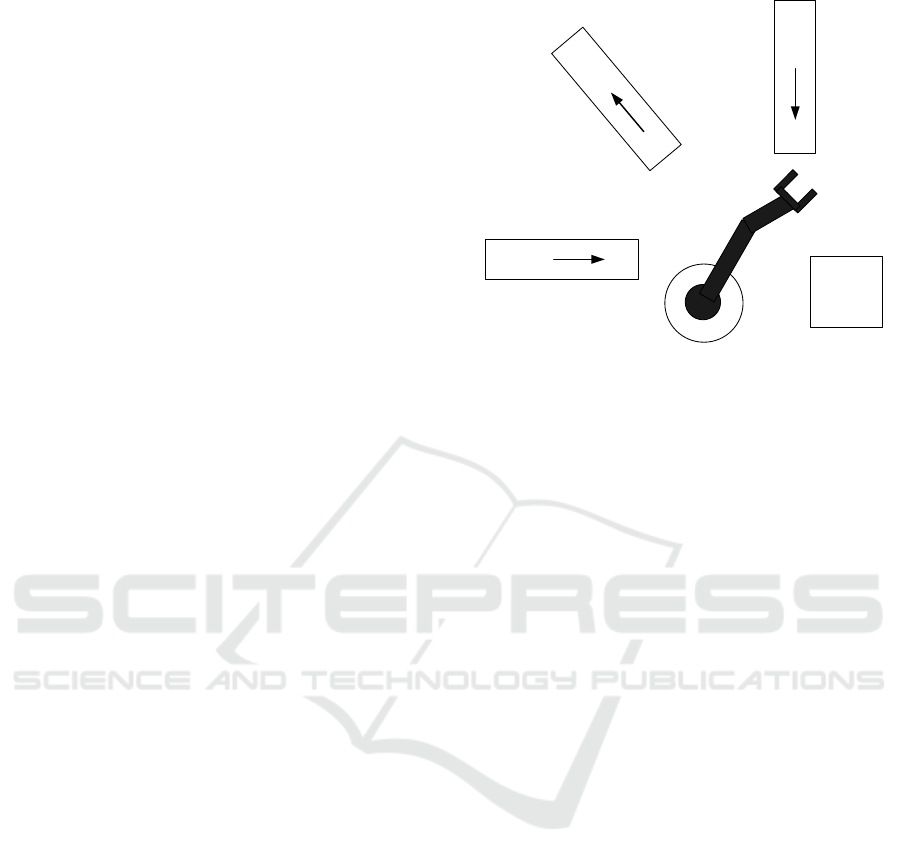
As briefly mentioned before in (Ben Noureddine
et al., 2016), we illustrate our contribution with a sim-
ple current example called RARM (Hruz and Zhou,
2007) (represented in Figure 1). It is composed of
two inputs and one output conveyors, a servicing ro-
bot and a processing-assembling center. Workpieces
to b e treated come irregularly on e by one. The work-
pieces of type A are delivered via conveyor C1 and
workpieces of the type B via the conveyor C2. Only
one workpiece can be on the input conveyor. A robot
R transfers workpieces one after the other to the pro -
cessing ce nter. The next workpiece can be put on the
input conveyor when it has been cleared by the robot.
The technology of production re quires that firstly an
A-workpiece is inserted into the center M and tre a te d,
then a B-workpie c e is added to the center, and finally
the two workpieces are assembled. Afterwards, the
assembled product is taken by the robot and put above
the C3 conveyor of output. The assembled product
can be transferred to C3 only when the output con-
veyor is empty and ready to receive th e next produced
one. We model individual robot systems as distribu-
ted age nts that deal autonomously with both local task
planning and conflicts that occ ur due to the presence
of oth e r r obotic agents. The overall behavior of the
RARM as a whole is then an emerging functiona lity
of the individual skills and the interac tion among the
forklifts.
The robot-like agent connects directly to the environ-
ment via through sensors.
4.1.1 Sensing Input
The ro bot-like agent receives the information of the
probes a s follows:
1. is there an object of the typ e A at the extreme end
of the position p1? (sens1)
2. is the conveyor C1 in its extreme left po sition?
(sens2)
3. is the conveyor C1 in its extreme right position?
(sens3)
4. is there an object of the type A at the treatment
unit M? (sens4)
A
Conveyor C1
A
B
C
o
n
v
e
y
o
r
C
3
B
Conveyor C2
Position p1
Position p2
Position p3 Position p4
P
osit
io
n
p
5
P
o
sitio
n
p6
Robot r
Processing unit
M
Figure 1: The benchmark production system RARM.
5. is the conveyor C 2 in its extreme left position?
(sens5)
6. is the conveyor C2 in its extreme right position?
(sens6)
7. is there an object of the type B at the extreme end
of the position p3? (sens7)
8. is there an object of the ty pe B at the treatment
unit M? (sens8)
9. is the conveyor C 3 in its extreme left position?
(sens9)
10. is the conveyor C3 in its extreme r ight po sition?
(sens10)
11. is there an object of the type AB at the treatment
unit M? (sens11)
12. is the agent’s robot-like ar m in its lower position?
(sens12)
13. is the agent’s robot-like arm in its highest posi-
tion? (sens13 )
4.1.2 Action Output
Once a n adapted order, called the pla n, is found; the
order w ith elevated level must be converted to ord ers
of low level to be sent to the releases so that the robot-
like agent can really carry out the plan.
Running example
The system can be ordered using the following relea-
ses:
1. move the conveyor C1 (act1);
2. move the conveyor C2 (act2);
3. move the conveyor C3 (act3);
4. rotate robotic agent (act4);
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
252

5. move elevating the robotic agent arm vertically
(act5);
6. pick up and drop a piece with the robotic agen t
arm (act6);
7. treat the workpiece (act7);
8. assembly two pieces (act8).
4.2 Preliminary Results
We prototype these id eas using the JADE agent plat-
form. We consider two RARM, each one has its
own ontology O
A
(resp. O
B
) to describe autonomous
robots. We define ontology for sub-domains, sen-
sors, perceptions, planning, actuators, decision ma-
king, etc. We assume that the agent descriptions of
the world is incomplete:
• O
A
has a complete description of sensing input
(e.g. sens1, sens2, sens3, sens4 , etc.), an action
output re presentation (e.g. act1, act2, act3, act4,
etc.), but an incomplete representation of the po-
licy (a whole state-action installs with at most an
action for each state).
• O
B
has a comp le te description fo r sensing input,
an incomplete representation of action output, and
a co mplete representation of plan (policy).
We consider 5 plans {π
i
|i=0..4 } in diso rder of the
actions used in our example:
• π
0
: (C2
le f t, take
2
, load
2
, process
2
)
• π
1
: (load
1
, put
1
, process
1
, C1
rig ht)
• π
2
: (C1
le f t, tak e
1
, load
1
, put
1
, process
1
,
C1 right)
• π
3
: (C2
le f t, take
2
, process
1
, C2 right)
• π
4
: (take
1
, load
1
, put
2
, C2
rig ht)
• π
5
: (C1
le f t, take
1
, put
2
, process
1
)
According to this kind of modeling, some action out-
puts explicitly desig nated by th e robot R ARM
a
be-
come ambiguous to RARM
b
. The align ment between
the ontologies d oes not solve the lack of action out-
puts’ rep resentation in the robot RARM
b
, similarly
the classical request protocol does not resolve the am-
biguity. We assume in this example that for every M
mapping, then A(M) = 1. We develop a scenario bet-
ween RARM
a
and RARM
b
. The goal is to exploit the
use of similarity measure in order to simplify the inte-
ractions among heterogeneous a gents, with different
sensors and different cap abilities. In this scenario, the
RARM
a
requests moving the conveyor C3 (i.e., act3)
to the RARM
b
request(1, 1, {do , sens9, ac t3}) cor-
respond ing to the request 1 of conversation 1. The
system checks the a lignment service to calculate the
alignment fo r this que ry, transforms the c oncepts in
the set of concepts correspondin g to the capabilities in
the ontology O
B
and sends a message to the RARM
b
.
Then the robot-like agent RARM
b
calculates its capa-
cities.
Figure 2 shows an interaction example based on the
context of RARM
b
executing cap a bilities. In our ex-
ample, RARM
b
has 6 plans. So, |C
p
| = 6. Conside-
ring tha t Sim
c
(sens9, act3 ) = 0.6, with c
p
= (1+0.6)/2
= 0.8. RARM
b
applies the third strategy, it uses the
performative challenge to inform RARM
a
by the am-
biguity. So. it sends the answer challenge(1, 1, {{do,
π
0
, act2}, {do, π
1
, act3}, {do, π
2
, act1}, {do, π
3
,
act5}, {do, π
4
, act3}, {do, π
5
, act4}}.
The ontology of RARM
a
doesn’t exactly allow mo-
deling outputs, the answer of RARM
b
is translated
into challenge (1, 1, {{do, π
1
, act3}, {do, π
4
, act3}}.
Since the initial context is RARM
a
, the next request
to RARM
a
clarifies the plans: request(1, 2, {do, π
4
,
act3}. Now, the application finds no more difficulty
and eventually is accepted by RARM
b
(i.e. RARM
b
sends a performative of confirmation assert(1, 2)).
5 CONCLUSION
In this paper, we pro pose a reflective agent model
to make a negotiation in an open and heterogeneous
MAS. We present a set of communicative acts allo-
wing queries disambiguation of heterogeneous agents
in incom plete alignment ontology. To do this, we use
a measure similarity to compare each entity of the
ontology with the other and select the most similar
pairs. In fact, when an agent A sends a request to an
agent B, B comp ares the information from the sent
message w ith its abilities; it calculates the cor respon-
dence degre e and acco rding to this degree it chooses
the corre sponding performative. This model introdu-
ces a kind of process which overco mes some common
problems that are encou ntered durin g the MAS deve-
lopment. Currently, we have b een developing a ben-
chmark production system as a case study on JADE
to improve the quality of the outcome; we shift fr om
a non-understood respond FIPA-request protocol to a
multi-response to clarify th e request. Finally, we pro-
vide an agen t interaction model to reach an agreement
over heterogene ous re presentations. The future plan-
ned works will d eal with the implementation of the
proposed model on a real multi-robot system with lar-
ger sets of data in heterogeneous ontologies.
Agent-based Semantic Negotiation Protocol for Semantic Heterogeneity Solving in Multi-agent System
253
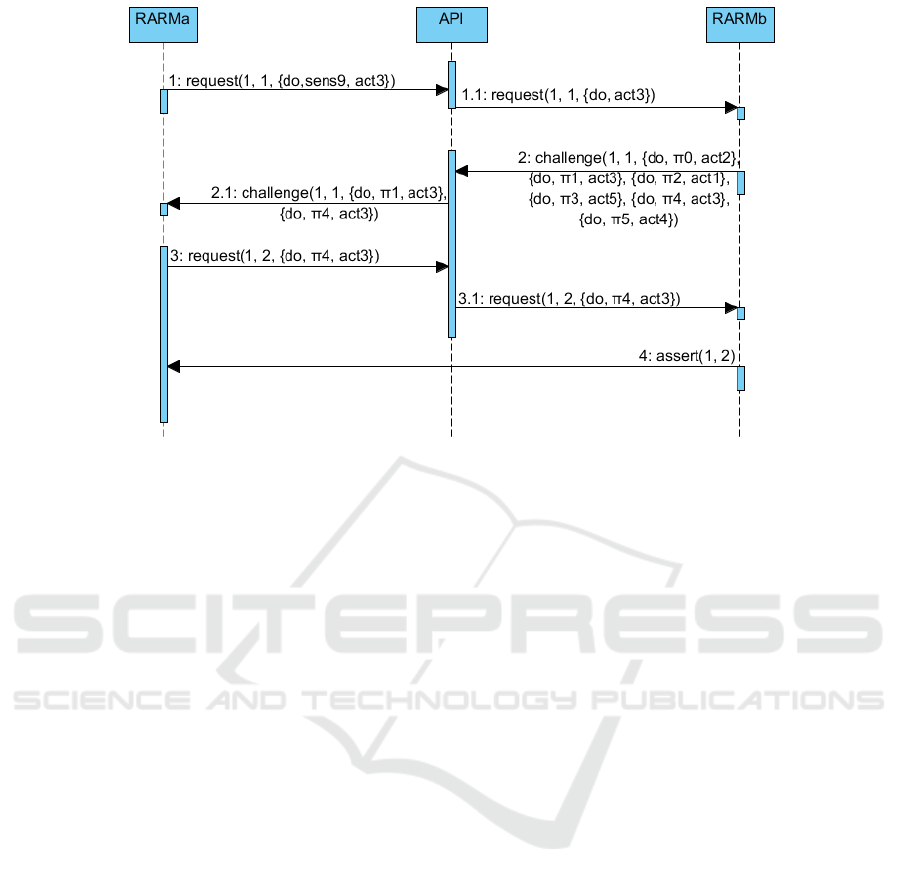
Figure 2: Interaction example between two multi-robot system. The center column doesn’t refer to an agent but represents an
ontology alignment service used for proof.
REFERENCES
Bellifemine, F., Caire, G., and Greenwood, D. (2007). De-
veloping multi-agent systems with jade.
Ben Noureddine, D., G harbi, A., and Ben Ahmed, S.
(2016). An approach f or multi-robot system based on
agent layered architecture. In P roc. of the 87th Inter-
national Conference on Artificial Intelligence and Soft
Computing (ICAISC’16), Lasbone, Portugal, pages 1–
9.
Bordini, R. e. a. (2006). A survey of programming langua-
ges and platforms for multi-agent systems. Informa-
tica, 30(1):33–44.
Chuan-Jun, S. (2011). Jade implemented mobile multi-
agent based, distributed information platform for per-
vasive health care monitoring. Applied Soft Compu-
ting, 11(1):315–325.
Comi, A., Fotia, L., Messina, F., Pappalardo, G., Rosaci,
D., and Sarne, G. M. (2015). Using semantic negotia-
tion for ontology enrichment in e-learning multi agent
systems. In Ninth International Conference on Com-
plex, Intelligent, and Software Intensive Systems, pa-
ges 474–479.
David, J., Euzenat, J., Scharffe, F., and Trojahn dos San-
tos, C. (2011). The alignment api 4.0. Semantic web
journal, 2(1):3–10.
De Meo, P., Quattrone, G., Rosaci, D., and Ursino, D.
(2012). Bilateral semantic negotiation: a decentrali-
sed approach to ontology enrichment in open multi-
agent systems. International Journal of Data Mining,
Modelling and Management, 4(1):1–38.
Euzenat, J. (2013). An api for ontology alignment.
Springer-Verlag, pages 698–712.
Garruzzo, S., Quattrone, G., Rosaci, D., and Ursino, D.
(2011). Improving agent interoperability via the au-
tomatic enrichment of multi-category ontologies. Web
Intelligence and Agent Systems, 9(4):291–318.
Garruzzo, S. and Rosaci, D. (2008). Agent clustering ba-
sed on semantic negotiation. ACM Transactions on
Autonomous and Adaptive Systems (TAAS), 3(2):7.
Hruz, B. and Zhou, M. (2007). Modeling and control of
discrete-event dynamic systems with petri nets and ot-
her tools. Springer, page 67.
Laera, L., Blacoe, I., Tamma, V., Payne, T.and Euzenat, J.,
and Bench-Capon, T. (2007). Argumentationove on-
tology correspondances in mas. In 6th international
joint conference on Autonomous Agents and MultiA-
gent Systems (AAMAS’07), pages 1285–1292.
Maes, P. (1994). Agents that reduce workload and in-
formation overload. Communications of the ACM,
37(7):30–40.
Messina, F., Pappalardo, G., Pappalardo, C., Santoro, D.,
Rosaci, G., and L., S. G. M. (2014). An agent
based negotiation protocol for cloud service level
agreements. In 2014 IEE E 23rd International In WE-
TICE Conference (WETICE), pages 161–166.
Morge, M. and Routier, J. (2007). Debating over heteroge-
neous descriptions. Applied Ontology, 2:333–349.
Salvatore, V. and Vincenzo, C. (2009). An extended
jade-s based framework for developing secure multi-
agent systems. Computer Standards & Interfaces,
31(5):913–930.
Shvaiko, P. and Euzenat, J. (2013). Ontology matching:
State of the art and future challenges. I EEE Transacti-
ons on knowledge and data engineering, 25:158–176.
Tversky, A. ( 1977). Features of similarity. Psychological
Review, pages 327–352.
ENASE 2017 - 12th International Conference on Evaluation of Novel Approaches to Software Engineering
254
