
New Verification Approach for Reconfigurable Distributed Systems
Oussama Khlifi
1,2,3,5
, Olfa Mosbahi
2
, Mohamed Khalgui
3,4
and Georg Frey
1,5
1
Chair of Automation, Saarland University, Saarbrücken, Germany
2
LISI laboratory, INSAT, University of Carthage, Tunis, Tunisia
3
Polytechnic School of Tunisia, University of Carthage, Tunis, Tunisia
4
School of Electro-Mechanical Engineering, Xidian University, Xi'an 710071, China
5
ZeMA – Zentrum fur Mechatronik und Automatisierungstechnik gemeinnützige GmbH, Saarbrücken, Germany
Keywords: Formal Verification, Model Checking, Adaptive Distributed Systems.
Abstract: Adaptive systems are able to modify their behaviors to cope with unpredictable significant changes at run-
time such as component failures. These systems are critical for future project and other intelligent systems.
Reconfiguration is often a major undertaking for systems: it might make its functions unavailable for some
time and make potential harm to human life or large financial investments. Thus, updating a system with a
new configuration requires the assurance that the new configuration will fully satisfy the expected
requirements. Formal verification has been widely used to guarantee that a system specification satisfies a
set of properties. However, applying verification techniques at run time for any potential change can be very
expensive and sometimes unfeasible. In this paper, we propose a new verification approach to deal with the
formal verification of these reconfiguration scenarios. New reconfigurable CTL semantics is introduced to
cover the verification of reconfigurable properties. It consists of two verification steps: design time and run-
time verification. A railway case study will be also presented.
1 INTRODUCTION
Adaptive discrete event control systems are dynamic
and evolve according to occurrence of discrete event
signals (Zhang et al., 2013). Examples of such
systems are used to solve future complex mission
needs in space exploration and railway train control.
They include a variety of man-made systems such as
flexible manufacturing systems, complex computer
programs and communication systems (Li and Zhou,
2009). They are able to change their behaviors with
an unpredictable way during run-time processes.
Reconfigurations are qualitative changes in the
structure, functionality, and algorithms of a control
system. A reconfiguration scenario is also assumed
to be any addition, removal or update of tasks and
resources (Salem et al., 2015). This is due to
qualitative changes of the controlled system or the
environment within which the system behaves
(Salem et al., 2015). Recently, we have seen an
increase in the deployment of safety critical
embedded systems in rapidly changing
environments, as well as need for on-site
customizations and rapid adaptation. However, since
there has been no information about the behavior of
the new configuration at design time, it is necessary
to reason about its impact and negative side effects
on the overall system behavior at run time since it
might make functions of the system unavailable for
some time (Sharifloo et al, 2013).
Although necessary, adaptations can cause
inconsistent and unstable configurations that must be
prevented for the embedded system to remain
dependable and safe. Therefore, verifying such
systems before they are deployed is essential
because there are limited to no opportunities to
effectively monitor and adjust their behavior during
operation (Sharifloo et al, 2013). Formal verification
has been widely used to guarantee that a system
specification satisfies a set of properties (Kalita et
al., 2002). The existing methods to certify
reconfigurable systems mainly focus on the
specification and verification of adaptation process:
These approaches are based on a complete
knowledge of the system and the environment
behavior at design time, so they are able to reason
about the properties of the whole interaction model
(Bortolussi et al., 2015). However, this is not the
case in many realistic examples in which the
information about the behavior of some components
and the environment are obtained only at run time.
Khlifi, O., Mosbahi, O., Khalgui, M. and Frey, G.
New Verification Approach for Reconfigurable Distributed Systems.
DOI: 10.5220/0006434003550362
In Proceedings of the 12th International Conference on Software Technologies (ICSOFT 2017), pages 355-362
ISBN: 978-989-758-262-2
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
355

This is why run-time verification techniques come
into play to monitor and check that the running
system does not violate the specification and the
properties (Bortolussi et al., 2015). Although it is
less expensive than model checking but it still not
complete, and do not guarantee the satisfaction of
the properties. Nevertheless, we find some limits in
the temporal logic CTL for the optimal verification
of adaptive properties.
To avoid any requirement violation, we have to
guarantee that all the properties will be satisfied in
case of applying any reconfiguration scenario
(Sharifloo et al, 2013). This could be guaranteed by
formally verifying the new system specification,
which is obtained by integrating the specification of
the new configuration, against the properties.
Intuitively, it is an extra work and overhead because
the major part of the specification does not change.
Moreover, model checking a large specification at
run-time at each reconfiguration is really difficult
because of the time and resource limitations
(Sharifloo et al, 2013). Thus, once it is possible to
refer to the verification results of the invariant part
for future verifications, this would significantly save
the time and resource usage. This is why verification
techniques to be proposed in this paper should verify
all behaviors of the reconfigurable systems. We
address run-time model checking of reconfigurable
systems which are seen as systems with changing or
unstable specifications. We focus on components
based reconfigurable systems represented by an
extension of Labelled Transition System and a
model checking approach based on Reconfigurable
Computation Tree Logic (CTL) (Zhang et al., 2013).
More specifically, this approach allows the designer
to verify the system at design time, even if some
components are not fixed (unstable, can be
replaced). The proposed model checking approach
verifies if the requirements hold and produces a set
of constraints for the unspecified components.
The paper is presented as follows: Section 2
describes the preliminaries on top of formal
verification. Section 3 presents the railway network
as a case study to show the problem statement.
Section 4 introduces the proposed verification
approach and its RCTL model checking. A
discussion is presented in Section 5. The last Section
concludes the paper.
2 BACKGROUND
We present in this section an overview of the
temporal logic CTL. Some formal verification
techniques such as model checking will be
presented. The related works will be discussed in
this part.
2.1 Computation Tree Logic
In CTL, all formulae specify behaviors of the system
starting from an assigned state in which the formula
is evaluated by taking paths (e.g. sequence of states)
into account. The semantics of formulae is defined
with respect to a reachability graph where states and
paths are used for the evaluation (Axelsson et al.,
2010). A reachability graph M consists of all global
states that the system can reach from a given initial
state. It is formally defined as a tuple M = [Z, E]
where:
• Z is a finite set of states,
• E is a finite set of transitions between
states, e.g. a set of edges (z, z
0
), such that z,
z
0
∈ Z and z
0
is reachable from z.
In CTL, paths play a key role in the definition
and evaluation of formulae. A path denoted by (z
i
)
starting from the state z
0
is a sequence of states, (z
i
) =
z
0
,z
1
... such that ∀j ∈ N, there is an edge (z
j
,z
j+1
) ∈ E.
The truth value of a CTL formula is evaluated with
respect to a certain state of the reachability graph.
Let z
0
∈ Z be a state of the reachability graph and ϕ
be a CTL formula (Axelsson et al., 2010). The
relation z
0
|= ϕ means that the CTL formula ϕ is
satisfied in the state z
0
. Then the relation |= for a
CTL formula is defined as follows:
• z
0
|= EFϕ, if there is a path (z
i
) and j > 0
such that z
j
|= ϕ, ˆ
• z
0
|= AFϕ, if for all paths (z
i
), there exists j
> 0 such that z
j
|= ϕ.
2.2 Model Checking
Model checking is a technique to automatically
verify the correctness properties of finite-state
systems (Baier and Katoen, 2008). It is a general
verification approach that is applicable to a wide
range of applications such as embedded systems,
software engineering, and hardware design. It also
supports partial verification, i.e., properties can be
checked individually, thus allowing focus on the
essential properties first. It can be also easily
integrated in existing development cycles since its
learning curve is not very steep, and empirical
studies indicate that it may lead to shorter
development times (Baier and Katoen, 2008). Model
checking is based on the reachability graphs of the
system. SESA (Starke and Roch, 2002) is an
effective software environment which analyses and
ICSOFT 2017 - 12th International Conference on Software Technologies
356

computes the set of reachable states exactly. Typical
properties which can be verified are boundedness of
places, liveness of transitions, and reachability of
states. In addition, temporal/functional properties
based on computation Tree Logic (CTL) specified
by users can be checked manually.
2.3 Related Work
There have been a set of approaches to formally
apply model checking techniques to verify the
properties at design time (Schneider et al., 2006).
Zhang and Cheng (Zhang and Cheng, 2006)
introduce a modular verification algorithm to verify
an adaptive system against the formulae expressed in
A-LTL (Zhang et al., 2006). The system is
represented as a state machine in which the states
present the system configurations and transitions are
adaptation actions. Xie and Zhe (Xie and Dang,
2004) propose a test-based approach for the
verification of component-based systems, in which
the behavior of some components is not specified.
The system consists of a host system and a
collection of unspecified components, which are
represented as finite transition systems that
synchronously communicate via a set of input/output
symbols. Schaefer (Schaefer, 2008) has provided
several approaches on verifying adaptive embedded
systems specified as synchronous adaptive systems -
high level representations of modelling concepts
used in the MARS modelling approach (Trapp et al.,
2007). The solution integrates model slicing of
various granularities to reduce the complexity and
enable automated model checking of the models by
means of theorem proving. The technique is tested
on adaptive vehicle stability control system. Goldsby
et al. (Goldsby et al., 2008) provide the AMOEBA-
RT model focused on run-time verification and
monitoring. Wang et al. (Wang et al., 2007) have
proposed usage of verification techniques to find the
optimal schedule for energy constrained systems.
Nevertheless, these works did not discuss how to
optimize the formal verification of reconfigurable
systems and their feasibility at run-time verification
at each adaptation.
3 RUNNING EXAMPLE
The running example used through this paper is
presented in this section. Rail transport is a means of
conveyance of passengers and goods on wheeled
vehicles running on rails. It is also commonly
referred to as train transport. It is a complex and
critical system because it deals with millions of
human life every day. It is also faced to different
challenges: safety from collisions and derailments
and provide as maximum line capacity as possible
for running many trains on the same line within the
safety constraints (The Metro, 2017). These systems
are considered to be reconfigurable distributed
systems because the railway structure is not static: it
is usually the subject of variant extension on
different lines. It is also faced to numerous accident,
structures breaking and natural disasters. Moreover,
the number of trains is always changeable; it is
possible to add extra trains to cover the increased
demand and to maintain quality of service.
Similarly, rapidly increasing capacity is the
biggest challenge facing all mass transit operators
today. As major cities expand, so too does demand
for high capacity and efficient railway network.
Thus, the speed of trains is not constant for almost of
the lines. Each change can be considered as an
adaptation process that affects the characteristics of
the system. As a real case study, the Paris Metro is a
safety critical reconfigurable system. It is a large
railway network with 14 main lines that cover 303
stations in the Paris area. It is mostly underground
and it has 205 km of tracks. This system carried 1.5
billion passengers in 2014 (The Metro, 2017). The
Metro system is an example of component-based
systems whose safety properties depend on the
dynamic components which are variable and change
at run-time. Such systems require a continuous
verification process to certify the correctness of the
system at any new adaptation process.
This verification step should be as light-weight as
possible to avoid intolerable overheads. The system
is highly critical and its safety is the main propose of
its existence. On the other side, the formal
verification of the whole system at each adaptation
process is considered to be unfeasible because of the
resources and time limitation at run-time. We focus
on the specification and verification part of the
project. We present the system as a modular
connected structure. It is a reconfigurable distributed
system that can change its characteristics at run-time
operation. Fig. 1 presents the abstract model of the
system. It is a 14 module system that represents the
different lines of the railway network. Each module
represents one metro line with its trains and
characteristics. It describes its capacity, structure
and its connection to other lines. We assume that
modules links represent the connections points
between different lines of the railway network. The
red rectangles are the system modules that represent
the unstable lines: its characteristics are not fixed at
New Verification Approach for Reconfigurable Distributed Systems
357
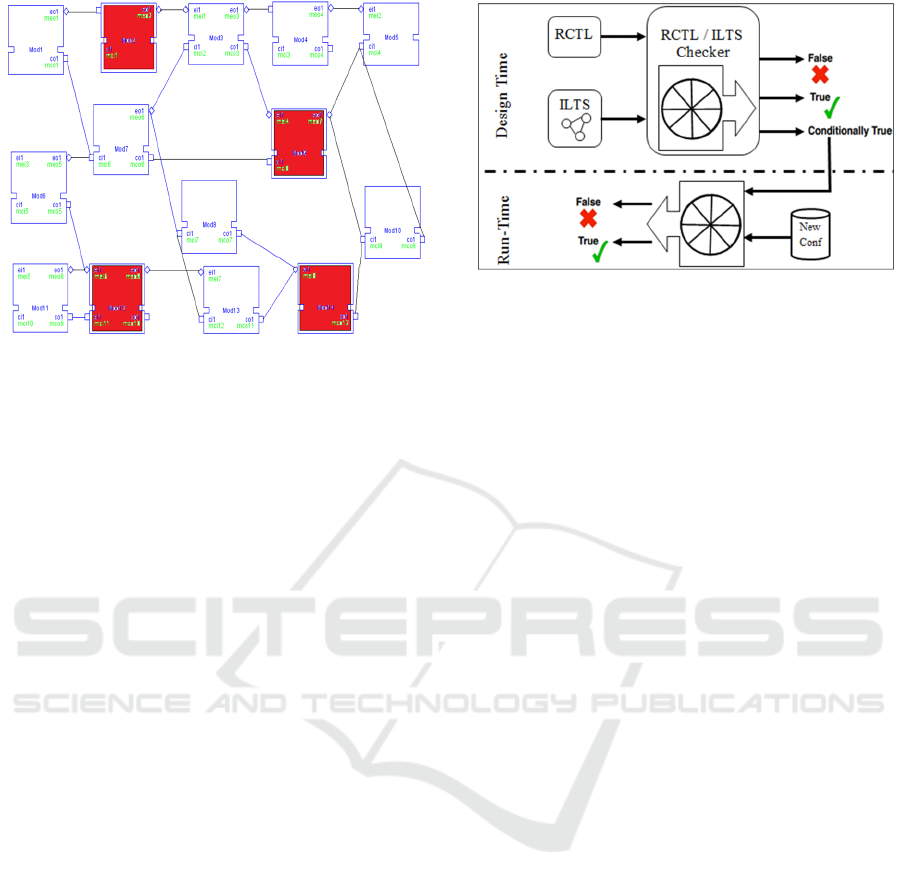
Figure 1: Reconfigurable railway network structure.
run-time. They are the object of new configurations
to cope with the environment requirements at the
current state of the system. These reconfigurations
are due to an increase demand to enlarge the line
capacity, the quality of service or to extend the line
to new parts of the urban area of the city
.
4 VERIFICATION APPROACH
The proposed model checking approach deals with
distributed reconfigurable models, where a set of
components or modules are considered to be
unstable (change their behavior at run-time process)
and could be also unspecified at design time and are
known only at run-time. Moreover, the classical
techniques enable to check the system every time the
unspecified components are resolved or modified at
design time. Indeed, the time and space required for
the verification could be considerable and since
many configurations are resolved only while the
system is operating, the total overhead in resolving
them has to be as small as possible. To get over this
problem, we propose a two-phase verification
approach that enables the designer to deal with
reconfigurable scenarios and incomplete
specification at design time and generate a set of
constraints to be checked for the unstable parts of
the system. Those constraints are verified at run-
time against the new configuration of the component
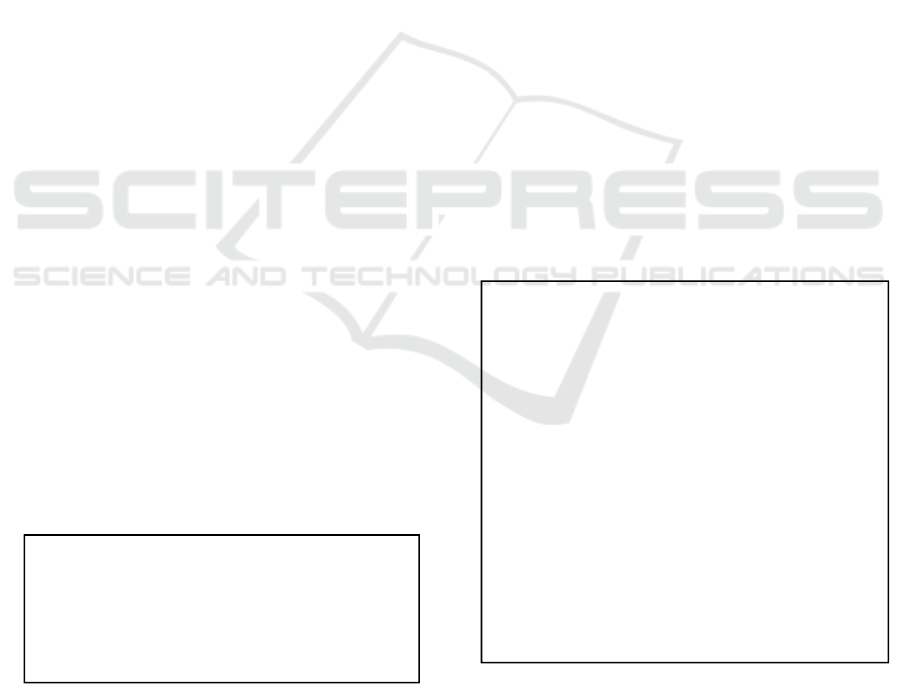
once it is available. A complete over view is given in
Fig. 2. It presents two verification levels: at design
time, the incomplete system is represented by a
particular labelled transition system. It is an
Incomplete Labelled Transition System dealing with
specified and unspecified states. It contains two
different states categories: the first are known as
Figure 2: New verification approach.
stable states which describe a predefined fixed part
or task of the system. The second are known as
unstable states to describe the reconfigurable
scenarios of the system which are unknown only at
design time or variable at run-time. The model is
then checked against the desired Reconfigurable
CTL properties “RCTL”. The results of the
verification process differ from the traditional model
checker by an extra output namely “Conditionally
True”. This option generates a set of constraints to
be checked against the reconfigurable module later.
At run-time, only these constraints are checked
against the new configuration and not the whole
system specification as used before in the standard
model checking.
4.1 Incomplete Labelled Transition
System
An incompletely labelled transition system (ILTS) is
a labelled transition system in which there are two
sets of states: stable and unstable states. It can
describe the unknown characteristics of the
reconfigurable system at the specification step.
Formally, it is a tuple (S, s
0
, R, L) where:
• S is the set of stable states T and unstable
states I, i.e., S = T ∪ I and T ∩ I = ∅;
• s
0
is the initial state, the unique entering
state, and it is a stable state,
• R ⊆ S × S represents the transitions
between states,
• L is a labelling function that associates a
subset of propositions to each stable state.
ILTS is used to specify any incomplete system
later. The proposed verification approach is based on
this formalism. Here, we present the ILTS of the
motivating example showed in Fig. 3. It is derived
from the net structure model: it is a LTS with some
special unknown states. The white places represent
the predefined (stable) states of the system. The red
ICSOFT 2017 - 12th International Conference on Software Technologies
358
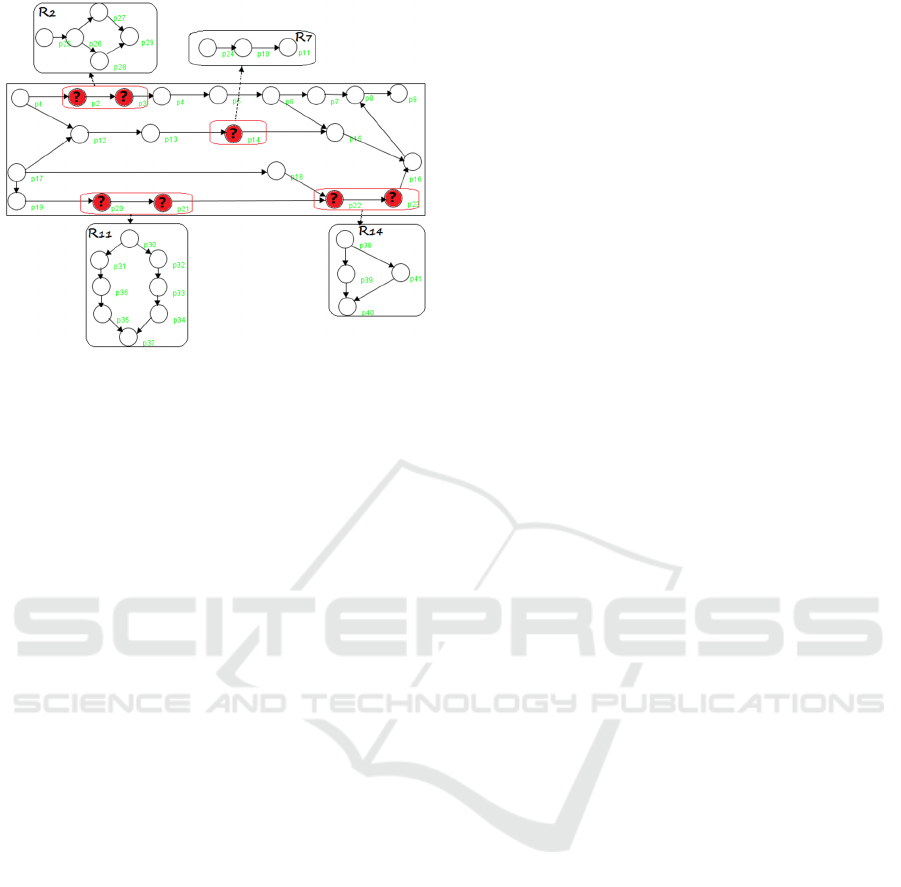
Figure 3: ILTS of the railway model.
the predefined (stable) states of the system. The red
states represent the reconfigurable states of the
system: its characteristics change at run-time. They
are the object of new configurations to cope with the
environment requirements at the current state of the
system. These reconfigurations are due to an
increase demand to enlarge the line capacity, the
quality of service or extending the line to new parts
of the area. (R
2
, R
7
, R
11
and R
14
) are
respectively new simple structures of the
reconfigurable modules (2, 7, 11 and 14) at this
adaptation phase. Then, once the structure is known,
the constraints are applied to check these new
specifications. R
2
is checked against the matrix
generated to satisfy the desired RCTL formula in the
second module.
4.2 RCTL Model Checking
Reconfigurable CTL (RCTL) model checking is an
extended version of CTL applied to adaptive
systems. It has the same semantics as the standard
CTL model checking for the “True” and “False”
outputs with an extra definition related to the third
possible output namely “Conditionally True”. We
will not recall the standard definition of CTL
semantics here; we just add the new semantics
related to unstable states and undefined paths. CTL
is classically defined on a state of LTS. RCTL is
defined now on states of ILTS, M=(S, s
0
, R, L), M, s
|= φ means that φ could hold in a state s of the ILTS
M. The set of constraints that are needed to satisfy
the formula φ in an unstable state s are saved in a
matrix constr. Each element constr(φ, s) is a set of
constraints in the form [(φ
1
, state
1
), . . . , (φ
n
, state
n
)],
meaning that the formula φ holds in s if the path
RCTL formula φ
1
holds in state
1
, and the path RCTL
formula φ
n
holds in state
n
. We present here the
semantics of RCTL:
• M, s |= φ ⇔ φ ∈ L(s) if s ∈ T and s |=
constr(φ, s) if s ∈ I ;
• M, s |= ¬φ ⇔ M, s ⊭ φ if s ∈ T and s ⊭
constr(φ, s) if s ∈ I ;
• M, s |= φ
1
∧ φ
2
⇔ M, s |= φ
1
and M, s |= φ
2
if s ∈ T; and s |= constr(φ
1
, s) and s |=
constr(φ
2
, s) if s ∈ I;
• M, s |= φ
1
∨ φ
2
⇔ M, s |= φ
1
or s |= φ
2
if s
∈ T; and s |= constr(φ
1
, s) or s |=
constr(φ
2
, s) if s ∈ I;
• M, s |= AXφ ⇔ (∀π such that π
0
= s, M, π
1
|= φ) for all paths starting at s, next time φ
if s ∈ T or next time constr(φ, s) if s ∈ I;
• M, s |= AFφ) ⇔ (∀π such that π
0
= s, ∃i
such that M, πi |= φ) for all paths starting at
s, eventually φ if s ∈ T or eventually
constr(φ, s) if s ∈ I;
• M, s|= AGφ ⇔ (∀π such that π
0
= s, ∀i M,
π
i
|= φ) for all paths starting at s, always φ
or always constr(φ, s) if s ∈ I;
• M, s |= φ
1
AUφ
2
⇔ (∀π such that π
0
= s, ∃ i
such that (∀ j < i (M, π
j
|= φ
1
)) ∧ (M, π
i
|=
φ
2
)), for all paths starting at s, φ
1
until φ
2
if s
∈ T or constr(φ
1
, s) until constr(φ
2
, s) if s
∈ I;
• M, s |= EXφ ⇔ (∃π such that π
0
= s, M, π
1
|= φ) there exists a path such that next time
φ if s ∈ T or next time constr(φ, s) if s ∈
I;
• M, s |= EFφ ⇔ (∃π such that π
0
= s, ∃ i
such that M, π
i
|= φ) there exists a path such
that eventually φ if s ∈ T or eventually
constr(φ, s) if s ∈ I;
• M, s |= E φ
1
∪ φ
2
⇔ if there exists a path π
starting from s such that ∃s
k
∈ π | M, s
k
|=
φ
2
if s∈ T or s |= constr(φ
2
, s) if s ∈ I and
∀ s
i
∈ π with i < k, M, s
i
|= φ
1
if s ∈ T or s
|= constr(φ
1
, s) if s ∈ I;
• M, s |= EGφ ⇔ if there exists an infinite
path π starting from s such that ∀ s
i
∈ π, M,
s
i
|= φ if s ∈ T and s |= constr(φ, s) if s ∈ I.
The core of the presented approach is an RCTL
model checking algorithm for incomplete models,
described using the ILTS formalism. It is based on
the traditional explicit CTL model checking (Clarck
et al., 1986) in order to deal with unstable and
incomplete states. The inputs of the algorithm are an
RCTL property and an ILTS model. If the ILTS is a
stable LTS, it behaves as the traditional approach on
predefined LTS. On the other hand, if the ILTS
New Verification Approach for Reconfigurable Distributed Systems
359
contains unknown states, it computes the set of path
RCTL formulae that shall be guaranteed by the
unspecified components later at run-time. More
precisely, the algorithm operates respecting these
steps. First, the RCTL formula is parsed and its
parsing tree is derived. Usually, the leaves are
propositions and the inner nodes are boolean and
temporal operators. As CTL model checking, a
bottom-up approach is applied to the tree to check if
each sub-formula holds. For each node of the tree,
the set of the states in which the sub-formula holds
is evaluated by parsing the tree, starting from the
leaves. The algorithm takes as inputs a subtree S
T
of
the parsing tree, the formula φ, and the ILTS M on
which the original formula is evaluated. The tree S
T
is a binary tree, where a node representing a unary
operator has a single son, while a node representing
a binary operator has two sons. We use S
T
.S to refer
to the set of states in M that satisfy the formula
represented by the current subtree, S
T
.left and
S
T
.right to refer to the left and the right subtrees of
the current tree (when the root is a binary operator),
and S
T
.son to refer to the subtree of the current tree
(when the root is a unary operator). The algorithm
can store the elements that satisfy φ in a local set X.
Moreover, the set of constraints that are needed to
satisfy the formula φ in an unstable state s are saved
in the matrix constr.
4.3 Marking Algorithms
We present here the marking algorithm of the
proposed RCTL temporal logic. The inputs are: A
model structure M, an RCTL formula ϕ and a
subtree t. The constraint Matrix is initiated (line 2).
Mark (ϕ, s) is a standard CTL marking function
dependent on the formula ϕ. This function is applied
once the visited state is a stable one (line 3). Let’s
assume that Mark (ϕ, s) ∈ {Mark(φ, s), Mark(¬φ, s),
Mark(φ
1
∧φ
2,
s), Mark(φ
1
∨φ
2
, s), Mark(AXφ, s),
Mark(AFφ, s), Mark(AGφ, s), Mark(φ
1
AUφ
2
, s),
Mark(EXφ,s), Mark(EFφ,s), Mark(E φ
1
Uφ
2
, s),
Mark(EGφ,s)}. On the other case (line 4), a
constraint is generated to be investigated at the
adaptation phases. This constraint is added to the set
of the existent constraints (line 5-6).
4.4 Degraded Verification Mode
Safety in critical systems is fundamental for their
operation. Reconfiguration makes possible for a
system to operate in different modes to be flexible as
possible and adapted according the characteristics
and requirements of the environment. Openness is
also an inherent property, as agents may join or
leave the system throughout its lifetime. The
proposed verification approach is based on the
generation of the constraints to be checked at each
reconfiguration scenario. In case we opt to check the
AGφ formula (line 3) on the model, i.e., this property
has to be satisfied by the whole system model. We
generate the corresponding constraints to be
respected during any adaptation. Before applying the
reconfiguration tasks, the proposed algorithm makes
sure that the new configuration satisfies the system
requirements (line 7). Then, it is possible to check
the satisfiability of the generated constraints on the
new updated specification. If it is true (line 8), the
system can operate safely and complete its running
task. In many other cases, the properties are not
respected and the system has to go forward with
respect to its safety. Here, the algorithm chooses to
degrade the running mode to the second level and
we try to find a possible combination that should be
possible to be executed by the system (line 9). Then,
we move to check the validity of following formula:
EGφ (line 10) that presents the existence of a
possible solution for the occurred deadlock state. For
the following three formulas: “AXφ, AFφ, pAUq”
(line 11). It is possible that the properties are
satisfied at the stable part of the system (line 12),
i.e., the reconfiguration scenario will not affect the
requirement of the system. Then, the verification
Marking (ϕ, t, M) {
1: for all (s ∈ M.S) {
2: constr (ϕ, s) = ∅;
3: if (s ∈ M.T) {mark (ϕ, s)}
4: elseif (s ∈ M.I) {
5: constr(ϕ, s) = constr(ϕ, s) ∪ {s};}}}
1: Verif_output R;
2: While ( R ≠ false) do
3: if (φ= AGp)
4: { R=“Conditionally True”;
5: constr(φ, s);
6: Execute_Reconfiguration();
7: Verif_constr();
8: if (R= True) then end;
9: else {φ:= EGp ;
10: Verif_constr();} }
11: if (φ= AXp) OR (φ= AFp) OR (φ=pAUq) {
12: if (R= “True”) then end;
13: if (R= “Conditionally True”)
14: { constr
(φ, s);
15: Execute_Reconfiguration();
16: Verif_constr();
17: if (R= True) then end;
18: else φ:= SUBSTITUE (φ; “A”; “E”); }
19: Verif_constr();}
20: end while
ICSOFT 2017 - 12th International Conference on Software Technologies
360
results should be “True”. Otherwise the
corresponding constraints are checked against the
updated parts of the system (line 14). In case of the
non-satisfaction of the desired constraints (line 18),
we can opt to the degradation. The algorithm checks
if it is possible to come over the faced deadlock
state. Then, we check respectively the following
constraints formulas “EXφ, EFφ, pEUq” (line 19).
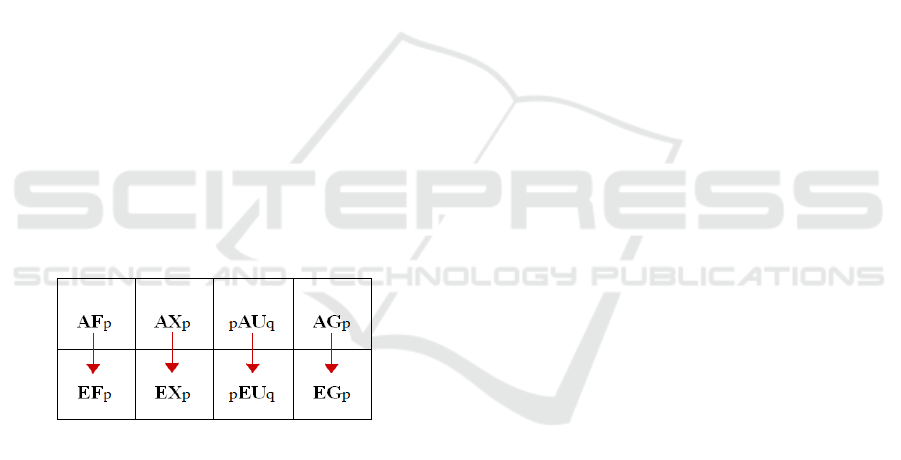
The degradation strategy is presented in a
summarized view in Fig. 4.
Here, the railway network is always the subject of
different addition/removing of trains to various lines.
As a solution for the increased demand to enlarge
the system structure and the quality of service
respecting to the critical safety, we can think about
the existence of possibility to apply the desired
property in the possible lines instead of the entire
network. We opt to check the validity and existence
of paths and scenarios that lead to desired target. For
example, if we aim to double the speed of some
trains: then, it will affect the safety distance between
the components of the network. The property
p=“double the speed”, then we check: EFp instead
of AFp. Similarly, if we hope to add two extra trains
in the network from certain stations to cover the
large demand: φ= “add two extra trains”, then we
check EXφ instead of AXφ. We check the formula on
the predecessor state of the desired state. We look
for proving the existence of safe options to improve
the quality of service of the system.
Figure 4: Degradation approach.
5 DISCUSSION
This paper highlights a double-phase approach to
efficiently verify reconfigurable distributed systems,
in which some components may dynamically change
at run time. The idea aims to introduce an optimized
formal certification method for adaptive systems:
much more useful to save time and memory
resources. The purpose is to optimize the verification
process: the needed time and space resources at each
modification of the system behavior. Based on the
use of a separated modular verification approach and
the results of the previous verification, we avoid the
repetition of many extra unnecessary tasks during the
certification of a reconfiguration scenario. To support
the methodology, a new semantics of the temporal
logic CTL is proposed to deal with the incomplete
labelled transition systems of an adaptive system. A
new marking algorithm to concretize the approach is
presented. A new degraded verification algorithm is
proposed as a solution for the deadlock states after
applying any adaptation process. To support this built
framework, correctness tests will be evaluated, we
will check the validity of the results of the proposed
RCTL model checking compared to the standard
model checking. The gain of time and space
resources will be also evaluated for huge states space
of adaptive systems. Scalability of the approach will
be considered in our future work. The presented case
study will be checked using the introduced
framework.
6 CONCLUSIONS
This paper focuses on the importance of online
formal verification of reconfigurable systems. It
introduces a new approach to efficiently certify
adaptation scenarios at run-time process. It can
avoid repetitive useless tasks that slow down the
certification of adaptation scenario. Sometimes, the
verification is unfeasible because of the time and
resources limitation at run-time. A verification
approach is proposed to cover the limits of
traditional model checking method coping with large
reconfigurable systems. An RCTL profile is
introduced to present the semantics of properties in
reconfigurable systems. An overview of the needed
algorithm is also presented. Marking algorithm and
degraded verification strategy are proposed here.
This paper states the preliminary steps to address the
runtime model checking of adaptive distributed
systems. This work could be extended in many
directions. At the moment, we are working on the
implementation of the algorithm and to explore a
new symbolic approach. In this paper, we presented
RCTL, but the future work is to support the full CTL
logics by adding other extensions.
REFERENCES
Axelsson, R., et al., 2010. “Extended computation tree
logic,” in Logic for Programming, Artificial
Intelligence, and Reasoning, Berlin Heidelberg:
Springer, pp. 67-81.
New Verification Approach for Reconfigurable Distributed Systems
361

Baier, C. and Katoen, J. P., 2008. “Principles of model
checking”. Vol. 26202649. MIT press Cambridge.
Bortolussi. L., et al., 2015. “Verification of Complex
Adaptive Systems”. [Online]. Available:
http://homepage.lnu.se/staff/daweaa/papers/2015CAS
Verification.pdf.
Clarck, E. A., Emerson, A. P., and Sistla, A. P., 1986.
“Automatic Verification of Finite-State Systems Using
Temporal Logic Specification: A Practical Approach,”
ACM Transaction on Programming Languages and
Systems, vol. 8, no. 2, pp. 244-263.
Goldsby, H. J. et al., 2008. “AMOEBA-RT: Run-Time
Verification of Adaptive Software”. In: Giese H. (eds)
Models in Software Engineering. MODELS 2007.
Lecture Notes in Computer Science, vol 5002.
Springer, Berlin, Heidelberg.
Kalita, D., and Khargonekar, P. P., 2002. “Formal
verification for analysis and design of logic controllers
for reconfigurable machining systems,” IEEE Trans.
Robot. Autom., vol. 18, no. 4, pp. 463–474.
Li, Z. W., and Zhou, M. C., 2009. “Deadlock Resolution
in Automated Manufacturing Systems: A Novel Petri
Net Approach,” London, U.K.: Springer, pp. 20-28.
Salem, M. O. B., Mosbahi, O., Khalgui, M., and Frey, G.,
2015. “ZiZo: Modeling, simulation and verification of
reconfigurable real-time control tasks sharing adaptive
resources: Application to the medical project BROS”.
Proceedings of the Int. Conf. on Health Informatics,
Portugal, pp. 20-31.
Schaefer. I., 2008. “Integrating Formal Verification into
the Model-Based Development of Adaptive Embedded
Systems”. PhD thesis, TU Kaiserslautern,
Kaiserslautern, Germany, ISBN 978-3-89963-862-2.
Sharifloo, A.M., and Spoletini, P., 2013. “LOVER: Light-
weight fOrmal Verification of adaptivE systems at
Run time” Formal Aspects of Component Software,
pp 170-177.
Schneider, K., et al., 2006. “Verifying the adaptation
behavior of embedded systems”. SEAMS ’06, pp. 16–
22.
Starke, P. H., and Roch, S., 2002. “Analysing signal-net
systems”. Professoren des Inst. für Informatik.
The Metro: a Parisian institution [online]. [Accessed 20
February 2017]. Available from: http://www.ratp.fr/
en/ratp/r_108503/the-metro-a-parisian-institution/.
Trapp, M. et al., 2007. “Runtime adaptation in safety-
critical automotive systems”. In Proceedings of the
25th Conference on IASTED International Multi-
Conference: Software Engineering, pages 308–315,
Anaheim, CA, USA, ACTA Press.
Wang, W., et al., 2007. “Reachability analysis of cost-
reward timed automata for energy efficiency
scheduling”. In Proceedings of Programming Models
and Applications on Multicores and Manycores,
PMAM’14, pages 140:140– 140:148, New York, NY,
USA, ACM.
Xie, G., and Dang. Z., 2004. “Ctl model-checking for
systems with unspecified finite state components”.
SAVCBS.
Zhang, J., and Cheng, B. H. C., 2006. “Using temporal
logic to specify adaptive program semantics”. Journal
of Systems and Software, vol. 79, no. 10, pp. 1361 –
1369.
Zhang, J., Khalgui, M., Li, Z. W., Mosbahi, O. and Al-
Ahmari, A. M., 2013. “R-TNCES: A novel formalism
for reconfigurable discrete event control systems”.
IEEE Trans. Systems, Man, and Cybernetics: Systems,
vol. 43, no. 4, pp. 757-772.
Zhang, J., et al., 2006. “Model-based development of
dynamically adaptive software”. ICSE ’06, pp. 371–
380, New York, NY, USA.
ICSOFT 2017 - 12th International Conference on Software Technologies
362
