
An Extrinsic Sensor Calibration Framework for Sensor-fusion based
Autonomous Vehicle Perception
Mokhtar Bouain
1,2
, Denis Berdjag
2
, Nizar Fakhfakh
1
and Rabie Ben Atitallah
2
1
Navya Company, Paris, France
2
LAMIH CNRS UMR 8201, University of Valenciennes, 59313 Valenciennes, France
Keywords:
Sensor Alignment, Sensor Calibration, Sensor Fusion, Intelligent Vehicles.
Abstract:
In this paper we deal with sensor alignment problems that appear when implementing sensor fusion-based au-
tonomous vehicle perception. We focus on extrinsic calibration of vision-based and line scan LIDAR sensors.
Based on state-of-art solutions, a consistent calibration toolchain is developed, with improvements (accuracy
and calibration duration). Additionally, sensor alignment/calibration impact on fusion-based perception is
investigated. Experimental results are provided for illustration, using real-world data.
1 INTRODUCTION
When dealing with robotic perception, single-sensor
architecture are range-limited. This limit depends
on many factors such as the technology of the de-
vice (resolution, range...), limited spatial and tempo-
ral coverage, measurement rates, noises... Indeed, any
cost-efficient sensor will be optimized to deal with a
specific task. As a result, when dealing with percep-
tion tasks in a rich environment, such as object de-
tection and avoidance for robots or autonomous nav-
igation, using multiple sensors is a natural solution
(Baig et al., 2011). Multi-sensor perception requires
data fusion approaches to reconstruct world features
for the robot, based on synergistic and redundant mea-
surements. Data fusion is indeed widely used in many
fields of robotics such as perception (obstacle detec-
tions, environment mapping)(Wittmann et al., 2014)
and also in process control tasks. However combin-
ing homogeneous or heterogeneous measurements re-
mains a challenge to be tackled. Some of the key
issues are the diversity of the existing technologies
and the appearance of new sensor types. Other issues
are related to the application field, for example, au-
tonomous vehicles will be driven in ”open” environ-
ments, and that implies stringent security constraints.
This research deals with the initial phase of any multi-
sensor acquisition, the alignment process. When fea-
tures are acquired for real world measurements, nor-
malization is required in order to reconstruct the IA
perceived word without bias, and take appropriate ac-
tions. We address specifically vision-based and LI-
DAR based sensor alignment, and derive a general
framework and the appropriate toolchain. Despite the
popularity topic, discussed in the next section, few
works address all the steps of the process. Then we
discuss the impacts of the calibration procedure on
fusion accuracy. This paper present three main con-
tributions:
• We develop further a specific framework pre-
sented in (Guo and Roumeliotis, 2013), and ex-
tend it from single to multi-line reference in or-
der to reduce the required number poses. In addi-
tion we address the problem of point-normal vec-
tor correspondences.
• we present a complete implementable toolchain,
to extract the co-features for both types of sen-
sors: line detections for cameras and segmenta-
tion process for LIDAR sensors in order to make
fully automated feature acquisition.
• we investigate the impact of the calibration accu-
racy on sensor fusion performance.
The remaining of this paper is organized as follows:
In section 2 we present a survey of existing methods
and point out the classification of alignment methods.
In section 3 we describe the problem formulation and
we present the analytical least square solution to the
multi-line calibration approach. The co-feature ex-
traction is discussed in section 4. We detail the im-
pact of the calibration task of sensor-fusion accuracy
in section 5. Section 6 discusses the experimental
setup and tests using real data. The conclusion and
future work are discussed in section 7.
Bouain, M., Berdjag, D., Fakhfakh, N. and Atitallah, R.
An Extrinsic Sensor Calibration Framework for Sensor-fusion based Autonomous Vehicle Perception.
DOI: 10.5220/0006438105050512
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 505-512
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
505

2 RELATED WORK
Multi-sensor architectures are popular nowadays, and
research works on derived topics such as calibra-
tion are also plentiful, especially about visual, iner-
tial and LIDAR sensors. The authors of (Li et al.,
2013) classify extrinsic calibration methods of cam-
era and LIDAR sensors. According to this classifica-
tion, there are three categories of camera/LIDAR cali-
bration: the first method is based on auxiliary sensors;
using a third sensor which is Inertial Measurement
Unit (IMU), extrinsic calibration is carried out. It is
shown that the rigid transformation between the two
frames can be estimated using the IMU (Nez et al.,
2009). The second method is based on specially de-
signed calibration boards. The idea is to use a par-
ticular pattern to determine targets position in both
sensors frames, and subsequently express the target
coordinates in each frame in order to derive the rigid
transformations. In (Fremont et al., 2012), the cali-
bration uses circular targets for intelligent vehicle ap-
plications and dedicated to multi-layer LIDAR. This
method determines the relative pose in rotation and
translation of the sensors using sets of correspond-
ing circular features acquired for several target con-
figurations (Fremont et al., 2012). Similarly, (Park
et al., 2014) uses a polygonal planar board to perform
calibration of color camera and multi-layer Lidar for
robot navigation tasks. Concerning the third category,
it is about methods that use chessboard targets. This
kind of calibration is also pattern specific. The ad-
vantage of this method is determining the intrinsic
parameters simultaneously for cameras and extrinsic
calibration of the camera and the LIDAR (Li et al.,
2013). In addition to these three categories, we con-
sider another category which is the automatic extrin-
sic calibration. This kind of method is handled with-
out a designed calibration board or another sensor as
mentioned above. (John et al., 2015) proposes a cali-
bration approach does not need any particular shape to
be located. Their method consists to integrate the per-
ceived data from 3D LIDAR and stereo camera using
Particle Swarm Optimization algorithms (PSO), using
acquired objects from the outer world, without the aid
of any dedicated external pattern.
In addition, we can distinguish three main meth-
ods to solve the established closed form between the
correspondence features. The first one solves the
closed form using linear methods such as the Singu-
lar Value Decomposition (SVD) and uses this solu-
tion as a first guess to perform a nonlinear optimiza-
tion such as Gauss-Newton or Levenberg-Marquardt
algorithms. The second method is based on the idea
that the determination of the global minimum of a
given cost function needs to find an initial guess lo-
cated in the basin of attraction. The authors of (Guo
and Roumeliotis, 2013) proposed an analytical least-
squares approach to carry out a generic calibration
process. The third method uses stochastic approaches
or search algorithms to associate the features between
two frames as the PSO algorithm, as it is shown in
(John et al., 2015). Based on the literature review,
we believe that the development of a generic solution
for sensor alignment is a viable solution. However in
the literature, little is said on the relationship between
sensor calibration and sensor fusion steps, apart from
automatic calibration approaches. We believe that
such contribution, for target-based solutions (shape or
pattern specific), is useful, especially if computation-
heavy algorithms (such as PSO) are avoided. In ad-
dition, few works address the tool-chain implementa-
tion on real vehicles. We believe that this topic is of
interest for practitioners.
3 PROBLEM FORMULATION
AND ANALYTICAL
LEAST-SQUARES SOLUTION
3.1 Problem Formulation and Basic
Concepts
The calibration process is an alignment procedure of
a given sensor frames. That is to say, find the relation
between the coordinates of sensor frames to ensure
the transformation from a frame into another. Con-
cerning the extrinsic calibration of a LIDAR sensor
and camera, it is about estimation of the relative posi-
tion for a given point located in the real world frame,
in the LIDAR and camera frames. the objective is
to find the unknown 6 Degrees Of Freedom (DOF)
transformation between the two sensor frames. In
other words, the goal is to find the rigid transforma-
tion [
C
R
L
|
C
−→
t
L
], which allows us to determine the cor-
respondence of a given 3D LIDAR point represented
as
−→
p
L
= [x
L
,y
L
,z
L
]
T
located into the frame of the LI-
DAR sensor {L}, in the frame of the camera {C}. Let
−→
p
C
= [x
C
,y
C
,z
C
]
T
be the correspondence of
−→
p
L
:
−→
p
C
=
C
R
L
−→
p
L
+
C
−→
t
L
(1)
Based on (Guo and Roumeliotis, 2013), we extend
the existing calibration solution to multi-line pattern
targets. We define the coordinate system for the sen-
sors as follows: the origin O
C
is the center of the
camera and the origin O
L
is the center of the LIDAR
sensor frame. Without loss of generality, the LIDAR
scanning plane is defined as the plane z
L
= 0 (see
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
506
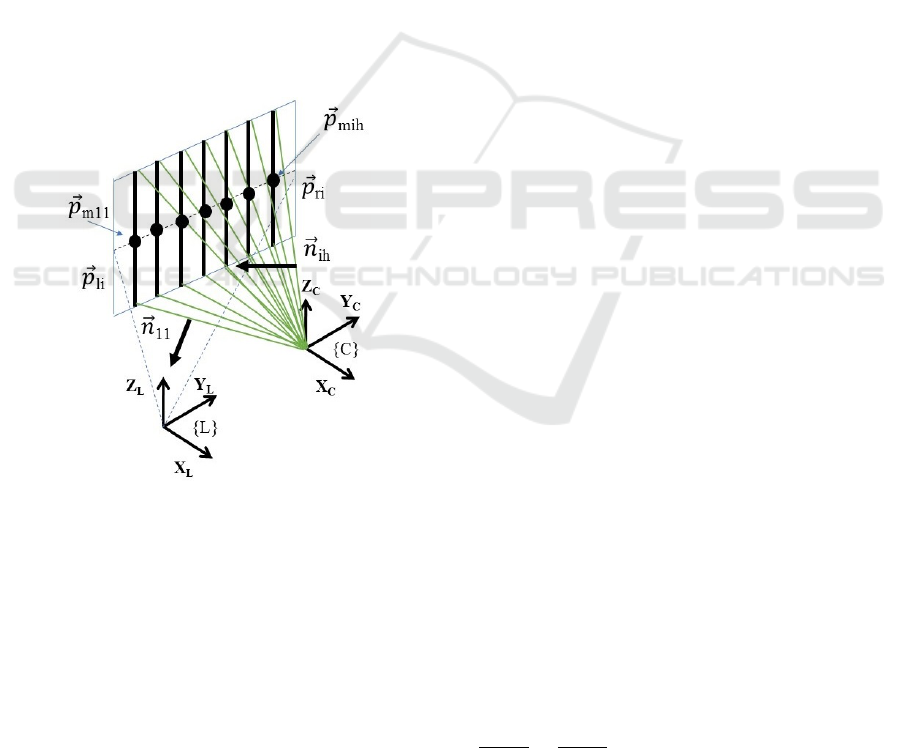
figure 1). Thus, a 3D LIDAR point represented as
−→
p
L
= [x
L
,y
L
,0]
T
. We consider that the calibration
board contains d horizontal black lines lb
ih
where h
is the number of line and i is the number of pose. It
is required to fix these lines equidistant between each
other, i.e. if there are d lines, it is necessary that the
(d + 1) parts are equals. Assume that
−→
p
li
and
−→
p
ri
are
respectively the left and right ending points of the pat-
tern. By dividing the distance between
−→
p
li
and
−→
p
ri
by (d + 1), we get an estimation of the positions of
−→
p
mih
(Fig. 1). Otherwise, the normal vector
−→
n
ih
is
perpendicular to the plane T
h
defined by l
bih
and the
camera center. Since the correspondent of
−→
p
mih
in
the camera frame {C} belongs to the plane T
h
, then
−→
n
ih
will correspond to
−→
p
mih
. Therefore, we obtain
the following geometric constraints:
−→
n
T
ih
−→
p
cih
=
−→
n
T
ih
(
C
R
L
−→
p
mih
+
C
−→
t
L
) = 0 (2)
where
−→
p
cih
is the correspondent of the LIDAR point
−→
p
mih
in the camera frame.
Figure 1: Notations and geometric constraints.
In real-world situations (2) is never satisfied due to
the measurement noise and it will usually be slightly
different from zero. The difference is the error e
i
. All
the residuals for n measurements can be represented
as
−→
e = (
−→
n
T
11
(
C
R
L
−→
p
m11
+
C
−→
t
L
),
−→
n
T
12
(
C
R
L
−→
p
m12
+
C
−→
t
L
)
,...
−→
n
T
nd
(
C
R
L
−→
p
mnd
+
C
−→
t
L
))
(3)
To estimate the transformation parameters [
C
R
L
|
C
−→
t
L
]
with accurately and minimize the residuals from (3),
we define the cost function J and we aim to minimize
the sum of squared errors :
J = argmin
C
t
L
,
C
R
L
n
∑
i=1
d
∑
h=1
(e
ih
)
2
(4)
J = argmin
C
t
L
,
C
R
L
n
∑
i=1
d
∑
h=1
(
−→
n
T
ih
(
C
R
L
−→
p
mih
+
C
−→
t
L
))
2
s.t.
C
R
T
L
C
R
L
= I, det(
C
R
L
) = 1
(5)
The two above conditions represent the rotational ma-
trix constraints.
We now have a correspondence between a 3D point
in LIDAR frame and the plane defined by O
C
and
the black lines in the camera frame. First, accord-
ing to (2) and for h = 1...d,
C
R
L
and
C
−→
t
L
are the
unknowns. Second, let
−→
r
1
,
−→
r
2
and
−→
r
3
be the three
columns of
C
R
L
. Since the LIDAR scanning plane is
defined as the plane z
L
= 0 then we do not have an
explicit dependence on
−→
r
3
and hence we can rewrite
−→
r
3
=
−→
r
1
×
−→
r
2
(× is the cross product).
To summarize, we get nine unknowns grouped in
−→
r
1
,
−→
r
2
and
C
−→
t
L
and three constraints since
C
R
L
is
an orthonormal matrix.
3.2 Closed-form Solution
3.2.1 Redefining the Optimization Problem
The objective is to solve the equation (5) to find the
parameters of calibration. The first step consists to
reduce the number of variables and constraints in (5).
Since the translation,
C
−→
t
L
is not involved in the con-
straints, it can be eliminated from the optimization
problem.
Lemma 1: By reducing the number of variables in (5)
the cost function is defined as follows:
J =
n
∑
i=1
d
∑
h=1
h
−→
n
T
ih
C
R
L
−→
p
mih
− (
n
∑
j=1
d
∑
l=1
−→
w
T
ih jl
C
R
L
−→
p
m jl
)
i
2
s.t.
L
R
T
C
C
R
L
= I, det(
C
R
L
) = 1
(6)
where:
−→
w
ih jl
=
−→
n
T
ih
n
∑
j=1
d
∑
l=1
−→
n
jl
−→
n
T
jl
−1
−→
n
jl
−→
n
T
jl
C
−→
t
L
= −
n
∑
i=1
d
∑
h=1
−→
n
ih
−→
n
T
ih
−1
n
∑
i=1
d
∑
h=1
−→
n
ih
−→
n
T
ih
C
R
L
−→
p
mih
(7)
Proof: By applying the first order necessary condi-
tion for optimality to the cost function, we obtain:
∂J
∂
C
−→
t
L
=
∂
∂
C
−→
t
L
n
∑
i=1
d
∑
h=1
(
−→
n
T
ih
(
C
R
L
−→
p
mih
+
C
−→
t
L
))
2
=
n
∑
i=1
d
∑
h=1
2
−→
n
ih
h
−→
n
T
ih
C
R
L
−→
p
mih
+
−→
n
T
i
C
−→
t
L
i
= 0
An Extrinsic Sensor Calibration Framework for Sensor-fusion based Autonomous Vehicle Perception
507

C
−→
t
L
= −F
−1
n
∑
i=1
d
∑
h=1
−→
n
ih
−→
n
T
ih
C
R
L
−→
p
mih
(8)
Where :
F =
n
∑
i=1
d
∑
h=1
−→
n
ih
−→
n
T
ih
J =
n
∑
i=1
d
∑
h=1
h
−→
n
T
ih
C
R
L
−→
p
mih
−
−→
n
T
ih
F
−1
(
n
∑
j=1
d
∑
l =1
−→
n
jl
−→
n
T
jl
C
R
L
−→
p
m jl
)
i
2
=
n
∑
i=1
d
∑
h=1
h
−→
n
T
ih
C
R
L
−→
p
mih
− (
n
∑
j=1
d
∑
l =1
−→
n
T
ih
F
−1
−→
n
jl
−→
n
T
jl
C
R
L
−→
p
m jl
)
i
2
And hence, the cost function is expressed only by
the rotation matrix and its constraints:
J =
n
∑
i=1
d
∑
h=1
h
−→
n
T
ih
C
R
L
−→
p
mih
− (
n
∑
j=1
d
∑
l=1
−→
w
T
ih jl
C
R
L
−→
p
m jl
)
i
2
3.2.2 Simplifying Optimization Problem using
Quaternion Unit
To simplify the problem and reduce further the num-
ber of unknowns, the quaternion unit q is employed
to represent the rotation matrix
C
R
L
. The conversion
from vectors to quaternions and all the quaternion
parameterization are presented in the appendix.
Lemma 2: By using the quaternion units, (6) can be
written as follows:
J =
n
∑
i=1
d
∑
h=1
"
q
T
S
ih
q
#
2
s.t.
L
q
T
C
L
q
C
= 1
(9)
where :
S
ih
= L( ¯n
ih
)
T
R ( ¯p
mih
) −
n
∑
j=1
d
∑
l=1
L( ¯w
ih jl
)
T
R ( ¯p
m jl
)
where L (.) and R (.) are left and right quaternion
multiplication matrices (see appendix for details).
Proof: Based on quaternion calculus properties, con-
version of 3D vectors into quaternions and quaternion
multiplication, we can rewrite the cost function as fol-
lows:
J =
n
∑
i=1
d
∑
h=1
"
−
n
T
ih
(q ⊗ ¯p
mih
⊗ q
−1
) −
n
∑
j=1
d
∑
l =1
−
w
T
ih jl
(q ⊗ ¯p
m jl
⊗ q
−1
)
#
2
=
n
∑
i=1
d
∑
h=1
"
−
n
T
ih
(L(q) ¯p
mih
⊗ q
−1
) −
n
∑
j=1
d
∑
l =1
¯w
T
ih jl
(L(q) ¯p
m jl
⊗ q
−1
)
#
2
Since (L (q) ¯p
mih
) ⊗q
−1
= R (q
−1
)(L(q) ¯p
mih
)
and (L (q) ¯p
m jl
) ⊗q
−1
= R (q
−1
)(L(q) ¯p
m jl
)
Then :
J =
n
∑
i=1
d
∑
h=1
"
−
n
T
ih
R (q
−1
)L(q) ¯p
mih
−
n
∑
j=1
d
∑
l =1
−
w
T
ih jl
R (q
−1
)L(q) ¯p
m jl
#
2
Since L (q) ¯p
mih
= R ( ¯p
mih
)q
and L (q) ¯p
m jl
= R ( ¯p
m jl
)q
Then the the cost function is reformulated as the following :
J =
n
∑
i=1
d
∑
h=1
"
q
T
L( ¯n
ih
)
T
R ( ¯p
mih
)q −
n
∑
j=1
d
∑
l =1
q
T
L( ¯w
ih jl
)
T
R ( ¯p
m jl
)q
#
2
=
n
∑
i=1
d
∑
h=1
"
q
T
L( ¯n
ih
)
T
R ( ¯p
mih
) −
n
∑
j=1
d
∑
l =1
L( ¯w
ih jl
)
T
R ( ¯p
m jl
)
q
#
2
3.2.3 Lagrange Multiplier Method
In order to solve the equation form Lemma 2, we
show now how to formulate the problem as a set of
polynomial equations. To solve the cost function J
we use the Lagrange multiplier method. According
to the Lagrange method, the Lagrangian function is
defined as follows:
L(q,λ) = J(q) + λ(
T
q q − 1) (10)
Where λ is the Lagrange multiplier.
Hence, using the method of Lagrange multiplier, we
obtain the following equations:
∑
n
i=1
∑
d
h=1
"
q
T
S
ih
q
#"
S
ih
+ S
T
ih
#
q + λq = 0
T
q q − 1 = 0
(11)
3.3 The Problem of Point-normal
Vector Correspondences
The use of point-normal vector correspondences is
strongly impacted by the quality of LIDAR endpoint
detection. Sometimes, the LIDAR endpoint will not
exactly locate on the border of the calibration tar-
get. In order to overcome this problem, the authors
of (Lipu and Zhidong, 2014) have proved that plac-
ing the calibration target nearby the LIDAR sensor
provides a high quality line-point correspondence and
sufficient constraints to estimate the rigid transforma-
tion. In addition, we present a method to improve
the accuracy of the endpoint estimation using virtual
points. The positions of the virtual points are deter-
mined by the average distance between the points of
LIDAR for each pose. So, if
−→
p
li
and
−→
p
ri
are the end-
ing points of calibration board (left and right side), the
average Euclidean distance is calculated as follows :
d
lri
=
dist(
−→
p
li
,
−→
p
ri
)
n
(12)
where n is the number of scanned point located on the
pattern. So, the positions of the left and right virtual
points are :
−→
p
V li
=
−→
p
li
−
d
lri
2
−→
u
−→
p
V ri
=
−→
p
ri
+
d
lri
2
−→
u
where
−→
u =
−→
p
ri
−
−→
p
li
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
508
4 PREPROCESSING AND
FEATURE EXTRACTION
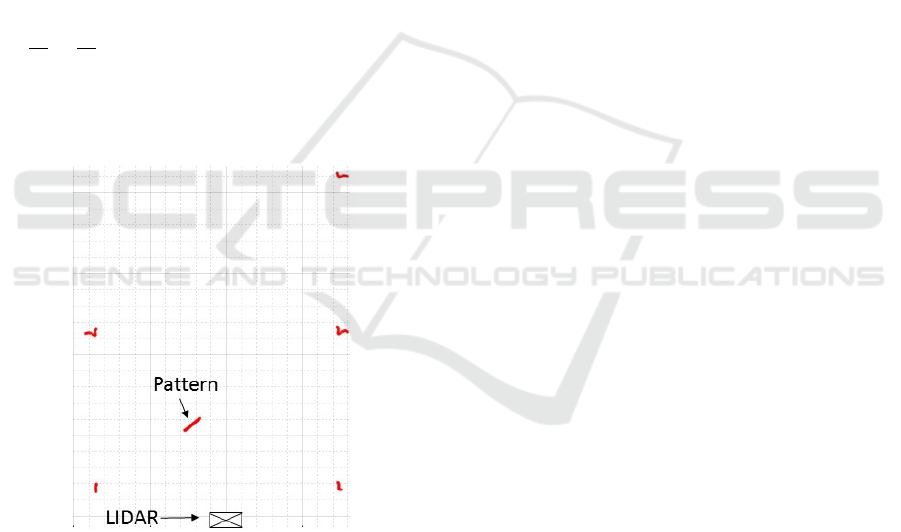
4.1 Extraction of 3D LIDAR Points
To extract the projected points of the source sensor
on the calibration board, the automatic extraction ap-
proach by differentiation of the measurements and
background data in static environments is often used.
However, in this work, this task is carried out by using
a segmentation process. Each segment (cluster) is de-
fined as a set of points and is composed ofa minimum
number of points distant according to a threshold dis-
tance denoted T hr. Therefore, if dist(
−→
p
i
,
−→
p
i+1
) <
T hr then a segment is defined with C
i
as its centroid.
Where,
−→
p
i
is the impact point of the LIDAR sensor,
dist(
−→
p
i
,
−→
p
i+1
) is the Euclidean distance between two
adjacent points and T hr is the required threshold. The
coordinate of each centroid C
i
is calculated as follows:
(
∑
p
x
i
n
,
∑
p
y
i
n
) where n is the number of points. We can
add another parameter to fix the minimum number of
points that compose a segment. Figure 2 shows the
projected impact points on the target and its environ-
ment.
Figure 2: Projected impact points (environment).
4.2 Extraction of Lines using Hough
Transform
Hough transform is considered to be an efficient
method to locate lines. The idea is to transform every
point in x − y space (Cartesian frame) into parameter
space (Polar frame). This method defines two param-
eters spaces which are r the length of a normal from
the origin of this line and θ is the orientation of r with
respect to the x − axis. Hence the line equation for
each line is r = x cos(θ) + ysin(θ). After the trans-
formation of all points into the parameter space, local
peaks in the parameter space associated to line candi-
dates in x − y space can be extracted. Otherwise, the
line detection chain consists of a set of instructions.
Before using the Hough transform it is necessary to
apply a spatial filter to the image in order to reduce
the noise. Among existing spatial filters, we use the
Gaussian smoothing which is a 2-D filter of images
that is used to remove/reduce the details and noises
and also to blur images. Mathematically, applying the
Gaussian smoothing filter it is the same as convolv-
ing the image with a Gaussian kernel. The main idea
is that the new pixels of the image are created by a
weighted average of the pixels close to it (gives more
weight to the central pixels and less weights to the
neighbors). After the removal of details and noises,
the edges of the image will be extracted using an edge
detector algorithm. It allows us to find the boundary
of objects and hence extract useful structural infor-
mation in order to reduce the amount of data to be
processed. Mainly there are two commonly used ap-
proaches for edge detection which are Canny and So-
bel edge detector (the difference of these approaches
is the kernel in that they are using). In this work, we
use the Canny edge detector. It is based on finding
the intensity gradient of the image, and according to
fixed thresholds, a pixel will be accepted as an edge
or rejected. At this stage, the Hough transform is ap-
plied. Note that there are additional steps are taken
to perform the extraction of black lines, such as limit-
ing the regions of interest to reduce the computational
burden. Also, it is necessary to filter false detections
and keep only the inlier lines. To do this, we use a
priori knowledge because we know that we need only
the vertical lines and concerning the horizontal lines
(or close to be), they are eliminated according to their
slopes. In addition, we use another criterion which is
the color of lines that are looking which is the black
therefore we keep the lines that have the black color.
5 SENSOR CALIBRATION
ACCURACY IMPACT ON
MULTI-SENSOR DATA FUSION
In order to fuse the data between sensors, it is neces-
sary to estimate or model the errors that are involved
in the data processing level. These errors will be used
to represent the uncertainties of sensors and to weigh
the measurements during the fusion process. Sensor
uncertainties are caused by many types of errors. We
distinguish two main types: the random errors which
An Extrinsic Sensor Calibration Framework for Sensor-fusion based Autonomous Vehicle Perception
509
are the noise measurements and the calibration errors
which are caused by the alignment process. There-
fore a multi-sensor data fusion should take into ac-
count these errors to improve its quality. The authors
of (Baig et al., 2011) use the Bayesian Fusion tech-
nique to fuse the positions acquired by two sensors in
the context of environment perception of autonomous
vehicles.
The sensors are employed to detect the positions
of obstacles. Position uncertainty is represented using
2D Gaussian distribution for both objects. Therefore,
if X is the true position of the detected object, by using
the Bayesian fusion, the probability of fused position
P
F
[x
F
y
F
]
T
by the two sensors is given as:
P
rob
(P|X) =
e
−(P−X)
T
R
−1
(P−X)
2
2π
p
|R|
(13)
where P is the fused position and R is the covariance
matrix are given as :
P =
P
1
/R
1
+ P
2
/R
2
1/R
1
+ 1/R
2
and 1/R = 1/R
1
+ 1/R
2
where P
1
and R
1
are the position and covariance ma-
trix of sensor 1 and P
2
and R
2
are that of sensor 2.
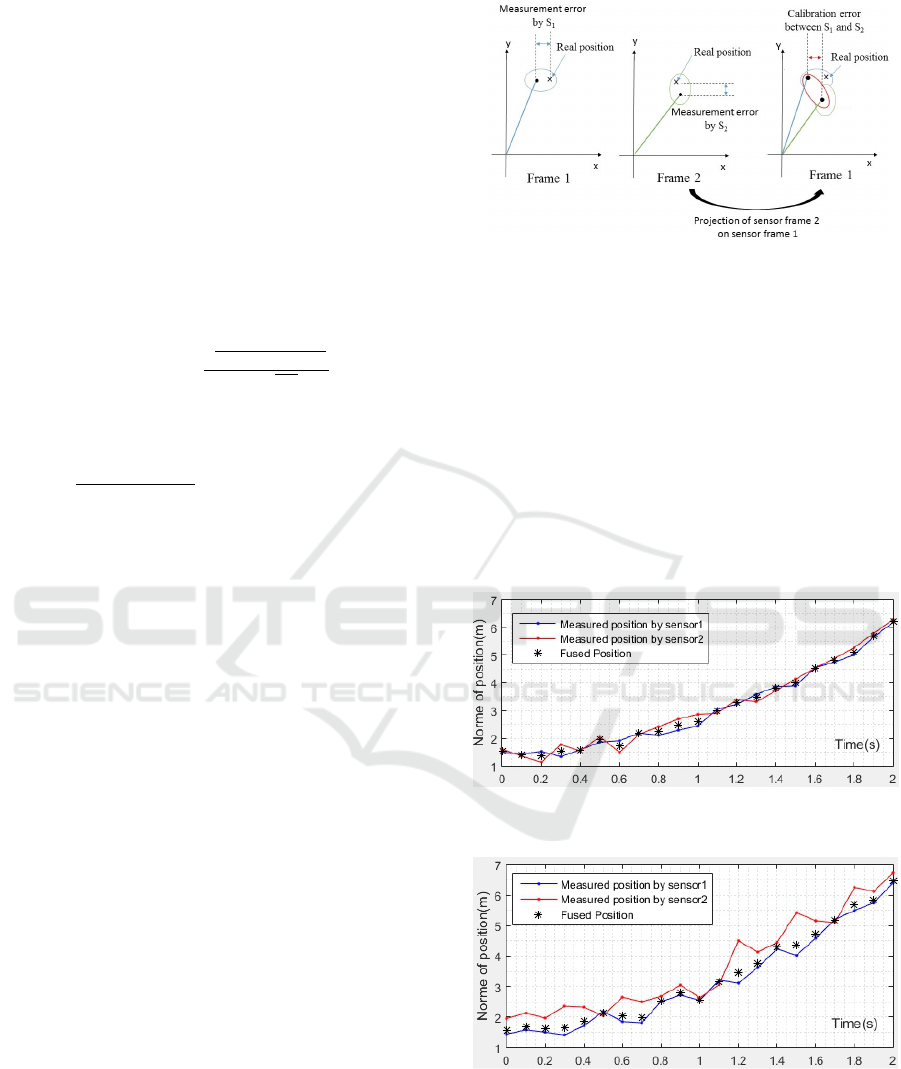
We acquire positions of the detected obstacles by both
sensors. Figure 3 shows the modeled error positions
of one detected obstacle by two sensors. The cross
represents the real positions which are unknown, the
two black dots represent the measurements of posi-
tions, the circles (red and green) are the position un-
certainties. The red circle is the calibration uncer-
tainty which is generated by the calibration process
which we are aiming to minimize. We test the im-
pact of the calibration process on a multi-sensor data
fusion based on Bayesian approach by varying the
covariance matrices of sensors. The noise measure-
ments will be Gaussian noises with zero mean and the
standard deviation is 120 mm for both of sensors. The
dynamic model of position is modeled by a rectilinear
motion. Note that R
1
= R
m1
i.e. the covariance matrix
of sensor 1 contains only the error of measurements.
In contrast, R
2
= R
m2
+ R
c
i.e. the covariance of sen-
sor 2 contains both measurement and calibration er-
rors (because the measurements of sensor 2 will be
projected on the frame of sensor 1). To summarize,
in the first simulation, the calibration error of sensor
2 will be small while in the second simulation we will
increase its calibration error.
Figures 4 and 5 show the obtained results: the norm
of position (meter) for each sensor with two configu-
rations of calibration errors over time. It is clear that
in the first simulation (Figure 4: when the sensor 2
has a small value of calibration error), the fused posi-
tion is located between the two provided positions by
Figure 3: Measurement and calibration errors.
the sensors. In contrast, in the second simulation and
when the calibration error rises, the fused position fol-
lows the position provided by sensor 1, because it has
the smallest error (see figure 5). According to these
experiments, it is clear that the outcome is a combina-
tion of the two measurements weighted by their noise
covariance’s matrices. Therefore, if the calibration
error grows then the projection of the measurement
of sensor 2 will be distorted, so the combined result
follows uniquely the measurement of the first sensor
(Figure 5). This makes the use of sensor 2 obsolete
and demonstrates the advantages of the multi-sensor
data fusion architecture.
Figure 4: Fusion of two positions weighted with similar co-
variance matrices.
Figure 5: Fusion of two positions with the increase in the
calibration error of sensor 2.
In practice, it is difficult to obtain or evaluate the
ground truth of the real extrinsic parameters between
the camera and LIDAR sensors. There are some
works define theirs own criteria. For our work we
propose the sum of squared residuals as an indicator
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
510
of calibration. As long as this criterion tends to 0 we
will get a good performance of calibration process.
6 EXPERIMENTS
In order to validate the multi-line approach, we con-
ducted a series of experiments in the real environ-
ment. We use line-scan LIDAR with an angular res-
olution 0.25 degree and a color camera with 640x480
resolution. The camera is modeled using a pinhole
model. The number of point-normal vector corre-
spondences is fixed to three. We use a white calibra-
tion board with three black lines (d = 3). Note that a
chessboard pattern is also usable.
6.1 Extraction of Lines from
Calibration Board
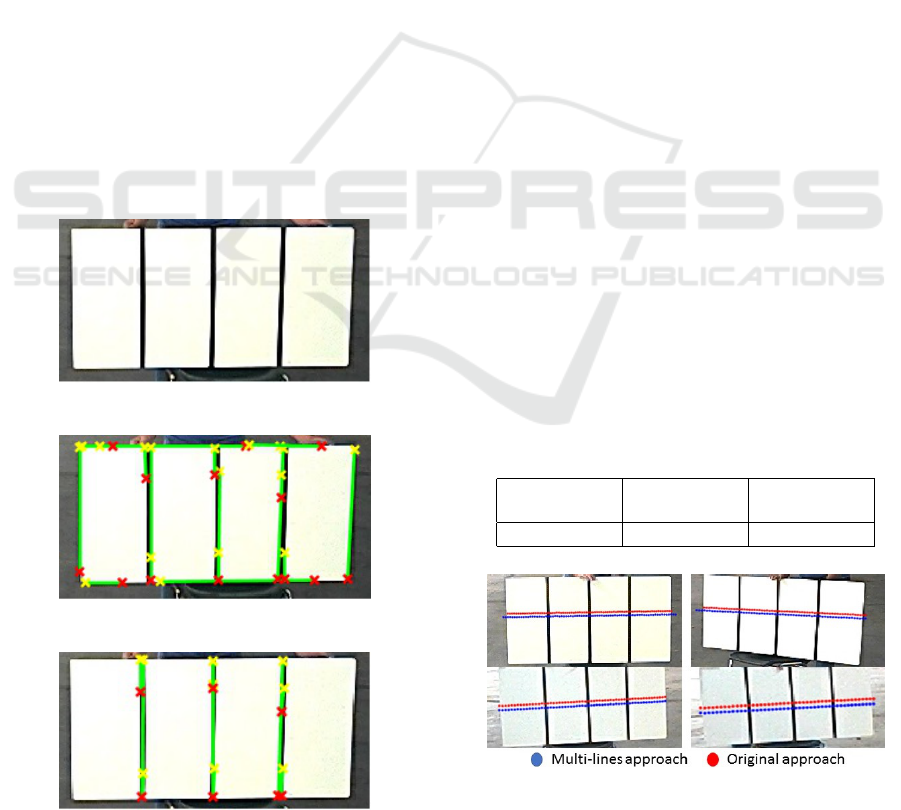
Figure 6 shows the calibration board with three black
lines. We use an image processing algorithm based
on Hough Transform to extract the lines. Figure 7
shows a partial result that contain some false detec-
tions other than the black lines (Figure 8). To remove
the false detections, we perform filtering and keep just
the three black lines (see section 6.1). Therefore, from
Figure 6: The used pattern for calibration (3 black lines).
Figure 7: Line detections using Hough Transform.
Figure 8: Keeping the black lines of the calibration board.
each line we need two points to determine the normal
vectors.
6.2 Results of Camera LIDAR
Calibration
For the original (existing) approach, we collected 21
point-normal vector correspondences to estimate cali-
bration parameters and used only 7 poses for the mod-
ified approach. The calibration board was moved to
a 3m to 9m distance range. To compare the results,
the average between the pixel coordinates of LIDAR
points for different poses is calculated. Table 1 shows
the results. The shown results correspond to the av-
erage absolute distance for u axis, v axis and the av-
erage Euclidean distance between the correspond pix-
els. According to these results, the two implementa-
tions are very close. Therefore, the result of the multi-
lines approach is well performed as original approach
with benefits reducing the required number of poses.
Otherwise, in order to suppress or at least reduce
the effect of noise during measurements, it is reason-
able to use multiple observations of the calibration
pattern from different views to obtain the required
6 DOF. Also, it is required to rotate the calibration
board to allow normal vector
−→
n
ih
to span all three di-
rections.
Figure (9) shows the projection results for the
two approaches for different orientations. Visually, it
is clear that there is a small difference between the
projected points for both of methods. It is due to
the different noises measurements and the polynomial
equation solver behavior. In fact, equation (11) has
a floating-point coefficients and it is not possible to
get the same solution because the measurements and
noises will be varying from one data set to another.
Table 1: The average difference between the two ap-
proaches.
Mean ”u”
dist. (pixel)
Mean ”v”
dist. (pixel)
Mean
dist. (pixel)
2.399 3.6816 3.3927
Figure 9: Projection of the LIDAR points into the image
plane.
An Extrinsic Sensor Calibration Framework for Sensor-fusion based Autonomous Vehicle Perception
511

7 CONCLUSIONS
In this paper, we address the problem of the frame
alignment between a camera and a 2-D LIDAR sensor
through the extended generic framework. The origi-
nal problem formulation implies using a given num-
ber of calibration poses is improved to use less poses.
When compared to other approaches which accuracy
depends on a precise initial guess, the proposed solu-
tion is formal and gives an optimal result for a given
calibration poses batch. We proved that with such
method, the number of observations can be reduced
for an accurate result. In addition, a tool-chain is de-
rived to extract sensor-acquired co-features. Real ex-
periments confirmed that the presented development
is beneficial for our application. Future works will
deal with a native integration of the alignment pro-
cess in the fusion algorithm, with an expected real-
time sensor realignment module to deal with inaccu-
rate initial calibration.
ACKNOWLEDGEMENTS
The authors would like to think Navya company
who provided the data set and the platform of ex-
periments. This research is financially supported by
Navya company and ANRT CIFRE program grant
from the French Government.
REFERENCES
Baig, Q., O., A., Trung-Dung, V., and Thierry, F. (2011).
Fusion Between Laser and Stereo Vision Data For
Moving Objects Tracking In Intersection Like Sce-
nario. In IV’2011 - IEEE Intelligent Vehicles Sympo-
sium, pages 362–367, Baden-Baden, Germany.
Fremont, V., Florez, S. A. R., and Bonnifait, P. (2012). Cir-
cular targets for 3d alignment of video and lidar sen-
sors. Advanced Robotics, 26:2087–2113.
Guo, C. X. and Roumeliotis, S. I. (2013). An analytical
least-squares solution to the line scan lidar-camera ex-
trinsic calibration problem. In Robotics and Automa-
tion (ICRA), 2013 IEEE International Conference on,
pages 2943–2948. IEEE.
John, V., Long, Q., Liu, Z., and Mita, S. (2015). Auto-
matic calibration and registration of lidar and stereo
camera without calibration objects. In 2015 IEEE In-
ternational Conference on Vehicular Electronics and
Safety (ICVES), pages 231–237.
Li, Y., Ruichek, Y., and Cappelle, C. (2013). Optimal ex-
trinsic calibration between a stereoscopic system and
a lidar. IEEE Transactions on Instrumentation and
Measurement, 62(8):2258–2269.
Lipu, Z. and Zhidong, D. (2014). A new algorithm for
the establishing data association between a camera
and a 2-d lidar. Tsinghua Science and Technology,
19(3):314–322.
Nez, P., Drews, P., Rocha, J. R. P., and Dias, J. (2009).
Data fusion calibration for a 3d laser range finder and
a camera using inertial data. In ECMR, pages 31–36.
Park, Y., Yun, S., Won, C. S., Cho, K., Um, K., and Sim, S.
(2014). Calibration between color camera and 3d lidar
instruments with a polygonal planar board. Sensors,
14(3):5333–5353.
Trawny, N. and Roumeliotis, S. I. (2005). Indirect kalman
filter for 3d attitude estimation. University of Min-
nesota, Dept. of Comp. Sci. & Eng., Tech. Rep, 2:2005.
Wittmann, D., F., C., and M., L. (2014). Improving lidar
data evaluation for object detection and tracking using
a priori knowledge and sensorfusion. In Informatics
in Control, Automation and Robotics (ICINCO), 2014
11th International Conference on, volume 1, pages
794–801. IEEE.
APPENDIX
- The quaternion is generally defined as
¯q = q
4
+ q
1
i + q
2
j + q
3
k (14)
where i, j, and k are hyper-imaginary numbers and the
quantity q
4
is the real or scalar part of the quaternion.
- To convert a 3D vector
−→
p to quaternion form we use
¯p = [
−→
p 0]
T
(15)
-The product
−→
p
2
= R
−→
p
1
where
−→
p
1
,
−→
p
2
are vectors,
R is the rotation matrix and q its quaternion equiva-
lent, can be written as follow
¯p
2
= q ⊗ ¯p
1
⊗ q
−1
(16)
where ⊗ presents quaternion multiplication, q
−1
is
the quaternion inverse defined as q
−1
= [−q
1
− q
2
−
q
3
q
4
]
T
.
-For any quaternions q
a
and q
b
, the product, q
a
⊗ q
b
is defined as
q
a
⊗ q
b
, L(q
a
)q
b
= R (q
b
)q
a
(17)
Where:
L(q) =
q
4
−q
3
q
2
q
1
q
3
q
4
−q
1
q
2
−q
2
q
1
q
4
q
3
−q
1
−q
2
−q
3
q
4
R (q) =
q
4
q
3
−q
2
q
1
−q
3
q
4
q
1
q
2
q
2
−q
1
q
4
q
3
−q
1
−q
2
−q
3
q
4
Also we have following properties
L(q
a
)R (q
b
) = R (q
b
)L(q
a
)
q
T
b
L(q
a
)
T
= q
T
b
R (q
a
)
T
L(q
−1
) = L(q)
T
R (q
−1
) = R (q)
T
For more details, the interested reader is referred to
(Trawny and Roumeliotis, 2005).
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
512
