
GPU Accelerated ACF Detector
Wiebe Van Ranst
1
, Floris De Smedt
2
, Toon Goedem
´
e
1
1
EAVISE, KU Leuven, Jan De Nayerlaan 5, B-2860 Sint-Katelijne-Waver, Belgium
2
Robovision BVBA, Technologiepark 5, B-9052 Zwijnaarde, Belgium
Keywords:
Person Detection, ACF, GPU, CUDA, Embedded.
Abstract:
The field of pedestrian detection has come a long way in recent decades. In terms of accuracy, the current
state-of-the-art is hands down reached by Deep Learning methods. However in terms of running speed this is
not always the case, traditional methods are often still faster than their Deep Learning counterparts. This is
especially true on embedded hardware, embedded platforms are often used in applications that require real-
time performance while at same the time having to make do with a limited amount of resources. In this paper
we present a GPU implementation of the ACF pedestrian detector and compare it to current Deep Learning
approaches (YOLO) on both a desktop GPU as well as the Jetson TX2 embedded GPU platform.
1 INTRODUCTION
Traditional handcrafted methods for pedestrian de-
tection (like Histogram of Oriented Gradients
(HOG) (Dalal and Triggs, 2005), Aggregate Chan-
nel Features (ACF) (Doll
´
ar et al., 2014), Deforma-
ble Parts Model (DPM) (Felzenszwalb et al., 2008))
which where the state-of-the-art just a few years ago
are nowadays in many cases surpassed by the rise
of Deep Learning in terms of accuracy. However
on embedded platforms traditional methods are still
quite relevant. Applications such as pedestrian safety
around self driving cars (Van Beeck, 2016), Unman-
ned Areal Vehicles (Tijtgat et al., 2017), some sur-
veillance applications. . . often demand real-time per-
formance with only a limited amount of resources.
This meant that in the past, deep learning was not
suitable for use on embedded platforms, traditional
detectors like ACF where the most suitable solution.
However with the arrival of platforms like the Jetson
TX2, which offer a really powerful GPU in an embed-
ded low-power package. Deep learning on embedded
platforms has become more feasible.
The goal of this paper is to make a fair compa-
rison of the old hand crafted methods to newer deep
learning methods on a platform like the Jetson TX2.
For this, we need a good GPU implementation of a
cutting edge pedestrian detector that uses hand craf-
ted methods. In this paper we take an in depth look at
this GPU implementation, we go deeper into how the
ACF algorithm can be parallelized so it can be used
on a GPU.
To evaluate our implementation we compare it
to the state-of-the-art Deep Learning object detector
YOLO (Redmon and Farhadi, 2016) in both accuracy
and speed.
2 RELATED WORK
Pedestrian detection is a well studied problem, a lot of
different approaches have been proposed. Currently
methods that reach state-of-the-art accuracy almost all
make use of deep neural networks. Detectors such as
Fast-RCNN and Faster-RCNN use a two-stage appro-
ach. In the first stage a number of regions are emitted
from a Region Proposal Network, which are then clas-
sified to further determine to which class, if any the
object belongs. Although these detectors have gained
a lot of speed improvement over the years, they are
still not sufficiently fast for real-time detection, let al-
one for embedded implementations. In recent years,
a large speed gain was made by tackling the object
detection problem as a single-stage approach (SSD,
YOLO, YOLOv2). . . The YOLOv2 detector (Redmon
and Farhadi, 2016) uses a single shot network to at
the same time predict object class as well as boun-
ding boxes. The output image is divided into a set of
anchor points, each containing a detection with dif-
ferent anchor boxes. The SSD (Liu et al., 2016) de-
tector uses a similar approach using only one network
for both detection and region proposal.
242
Ranst, W., Smedt, F. and Goedemé, T.
GPU Accelerated ACF Detector.
DOI: 10.5220/0006585102420248
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
242-248
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved

In the past, up to a few years ago hand crafted fea-
ture based methods where the state-of-the-art in ob-
ject detection. Detectors like Viola and Jones (Vi-
ola et al., 2003), HOG (Dalal and Triggs, 2005),
ICF (Doll
´
ar et al., 2009), ACF (Doll
´
ar et al., 2014)
and DPM (Felzenszwalb et al., 2008) are some ex-
amples of detectors that use these kind of features.
Viola and Jones and ICF calculate an integral inten-
sity image, and use some kind of Haar wavelets to
generate possible feature values. HOG, ACF, ICF and
DPM make use of so called HOG like features. Mul-
tiple histograms, each representing a small part of the
image are calculated on the image gradient, each bin
in the image then represents a separate feature layer.
The DPM detector learns a detector for different parts
of the object which makes it more invariant to pose
changes. The calculated features are then used to train
a classifier using SVM or AdaBoost. To cover the en-
tire image a sliding window approach is used to eva-
luate all possible detection windows in the image on
different scales.
In this paper we choose to focus further on the the
ACF person detector for a few reasons: ACF is in it-
self, on CPU already quite fast, which means that it
is often used as a person detector on embedded plat-
forms. Porting ACF to GPU is something that to the
best of our knowledge has not been done before. The
authors in (Obukhov, 2011) explain how the Viola and
Jones face detections algorithm can be ported to GPU,
which is some ways similar to ACF.
The GPU implementation is an extension of our
own CPU implementation of ACF, which is already
faster than D
`
ollar’s Matlab implementation.
3 ACF PERSON DETECTOR
To be able to follow along with our GPU implemen-
tation of the ACF algorithm we will first give a brief
overview of the ACF algorithm itself.
The ACF person detector uses an AdaBoost clas-
sifier which uses “ACF features” to classify image pa-
tches, the entire image is searched using a sliding win-
dow approach.
In total the ACF features consist of ten channels,
LUV color / intensity information, gradient magni-
tude and histograms of Oriented Gradients (HOG).
They are calculated as follows: RGB color informa-
tion coming from an image source is converted to the
LUV color space, a gaussian blur is applied and the
resulting Luminosity (L) and chroma values (U and
V) are used for the first three channels. The gradients
(in both directions) of the image are calculated from
the luminosity channel. The magnitude of the gra-
dient, after again applying a gaussian blur is the fourth
channel. The six remaining channels each represent a
different bin (containing a set of orientations) in the
gradient orientation histogram. A separate histogram
is calculated for each patch of n ×n pixels (often 4x4)
in the gradient images, this means that the resulting
feature channels will be downscaled by a factor of n
(know as the shrinking factor). To make sure that all
channels have the same dimensions, the LUV and gra-
dient magnitude channels are also downscaled by the
shrinking factor. Each gradient magnitude in the n×n
patch for which a histogram is calculated is placed in
the two neighboring bins using linear interpolation ac-
cording to its orientation.
Using these features a classifier can be trained
to detect objects like people. In our implementation
we are only interested in speeding up the evaluation
phase as it is the only part that needs to run in real-
time, and also the only part that will run on embed-
ded hardware. For this reason we will only explain
how evaluation of an ACF model is performed, and
omit the training phase details.
For classification ACF uses a variation of the Ada-
Boost (Freund and Schapire, 1995) algorithm. A se-
ries of weak classifiers (decision trees) are evaluated
to make one strong classifier. Every decision tree adds
or subtracts a certain value (determined during trai-
ning) to a global sum which represents the detection
score for a certain window, as seen in equation 1.
H
N
(X) =
N
∑
n=1
h
n
(x) (1)
Decision trees are evaluated sequentially, if at any
point N the global score H
N
reaches a value below a
certain cutoff threshold, the evaluation for that par-
ticular window is stopped. Only for windows that
never go below this threshold all decision trees are
evaluated. Stopping early with the evaluation means
that much fewer decision trees have to be evaluated
making the evaluation much faster. Only windows
with a high score (where the object likely is present)
are evaluated fully. After evaluating each window in
this fashion using the sliding window approach, Non-
Maximum-Suppression (NMS) is applied which gives
us our final detection boxes.
4 GPU IMPLEMENTATION
We can divide our GPU implementation of the ACF
detector into two different steps, feature calculation
and model evaluation. In this section we will explain
both of them. In preliminary test we saw that for the
GPU Accelerated ACF Detector
243

CPU version the feature calculation step took the lon-
gest (77% on the Jetson TX2 and 70% on a desktop
system).
4.1 Feature Calculation
Feature calculation on the GPU is quite straight for-
ward, it uses mainly primitive image processing ope-
rations that are already implemented in GPU libraries.
We use the NVIDIA Performance Primitives (NPP)
library, to do LUV color conversion, smoothing, and
to calculate the gradient and gradient magnitude. An
advantage of calculating features on the GPU is that
features can remain in GPU memory, there is no need
to do data transfers from host to GPU
1
.
Histogram binning is done in a separate kernel we
created ourselves. For each n ×n patch in the gradient
images we launch a separate thread. Each thread ite-
rates over all pixels in its n × n patch and then divi-
des the gradient magnitude at that position over two
neighboring bins. The result is stored in a separate
histogram that is kept in private memory. When all
bins in the patch are calculated we write the histogram
bins one after the other to its corresponding channel in
global memory. Keeping a buffer in private memory
before we write to global memory ensures coalesced
global memory access. Listing 1 shows the complete
pipeline for feature calculation.
Listing 1: Feature calculation pipeline. Percentages indi-
cate the amount of time spent during a step.
1 . (15%) Copy i n p u t image t o GPU
2 . (15%) C on v e r t RGB i mage t o LUV
3 . (7%) C a l c u l a t e g r a d i e n t from
L ( u m i n o c i t y )
4 . (37%) H i s t o g r a m b i n n i n g
5 . (26%) Downsc a l e LUV /
g r a d i e n t m a g n i t u d e
4.2 Model Evaluation
While the feature calculation in the previous section
was quite straightforward for a GPU, the model eva-
luation step is far from it. The way in which feature
evaluation is done means that if we naively port the
algorithm to the GPU i.e. by assigning each thread a
separate window, a lot of branch divergence will hap-
pen. Windows that are done early (which is the ma-
jority) will idle while waiting for others (in the same
warp) to complete. Model evaluation is also mainly
memory bound, the only real computation that needs
1
On the TX2 platform this is not a problem as memory
is shared between host and GPU.
Grid
Block
Thread
Thread
...
Thread
Thread
Thread Thread
Block
Thread
Thread
...
Thread
Thread
Thread Thread
...
Figure 1: Instead of evaluating each window separately
each window is assigned to a separate CUDA thread.
to happen inside the kernel is the comparison of a fe-
ature value to its corresponding threshold, and calcu-
lating the next node to evaluate in the decision tree.
The needed feature values are also sparsely populated
throughout the memory making misaligned memory
accesses a common occurrence. All of this means that
it is quite challenging to get big speedups in the eva-
luation stage. In this section we will explain the diffe-
rent approaches we took to overcome these problems.
In section 5 these approaches are evaluated in terms
of runtime speed.
4.2.1 Na
¨
ıve Approach
As a first step, we made a naive implementation for
comparison. As previously mentioned a na
¨
ıve ap-
proach of porting the evaluation to GPU is by sim-
ply assigning each thread to a single window. Instead
of doing each window one after another, we evaluate
windows in parallel, see figure 1. As we will show
in section 5, this approach on its own does not yield
good results, data is accessed sparsely throughout me-
mory, and a lot of branch divergence occurs.
4.2.2 Course-fine Detector
In a first attempt, we tried to gain speed by reducing
the memory footprint during detection. Based on the
approach of (Pedersoli et al., 2015) who managed to
speed up a part-based detector 10 fold, we divide the
evaluation pipeline in multiple stages. The image is
first evaluated using a coarse model which uses a hig-
her shrinking factor. This results in a coarser feature
map that is also much smaller. Using a smaller mo-
del means that it is much easier to keep features in
cache longer which should yield higher performance,
solving the memory sparsity problem somewhat. De-
tections that are not ruled out by the coarse detector
are then given to a fine detector which is trained to
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
244
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Recall
Precision
88% ACFFineCoarse2048
88% ACFFineCoarse
87% ACFOurs
86% ACFCoarseOnly2048
84% ACFCoarseOnly
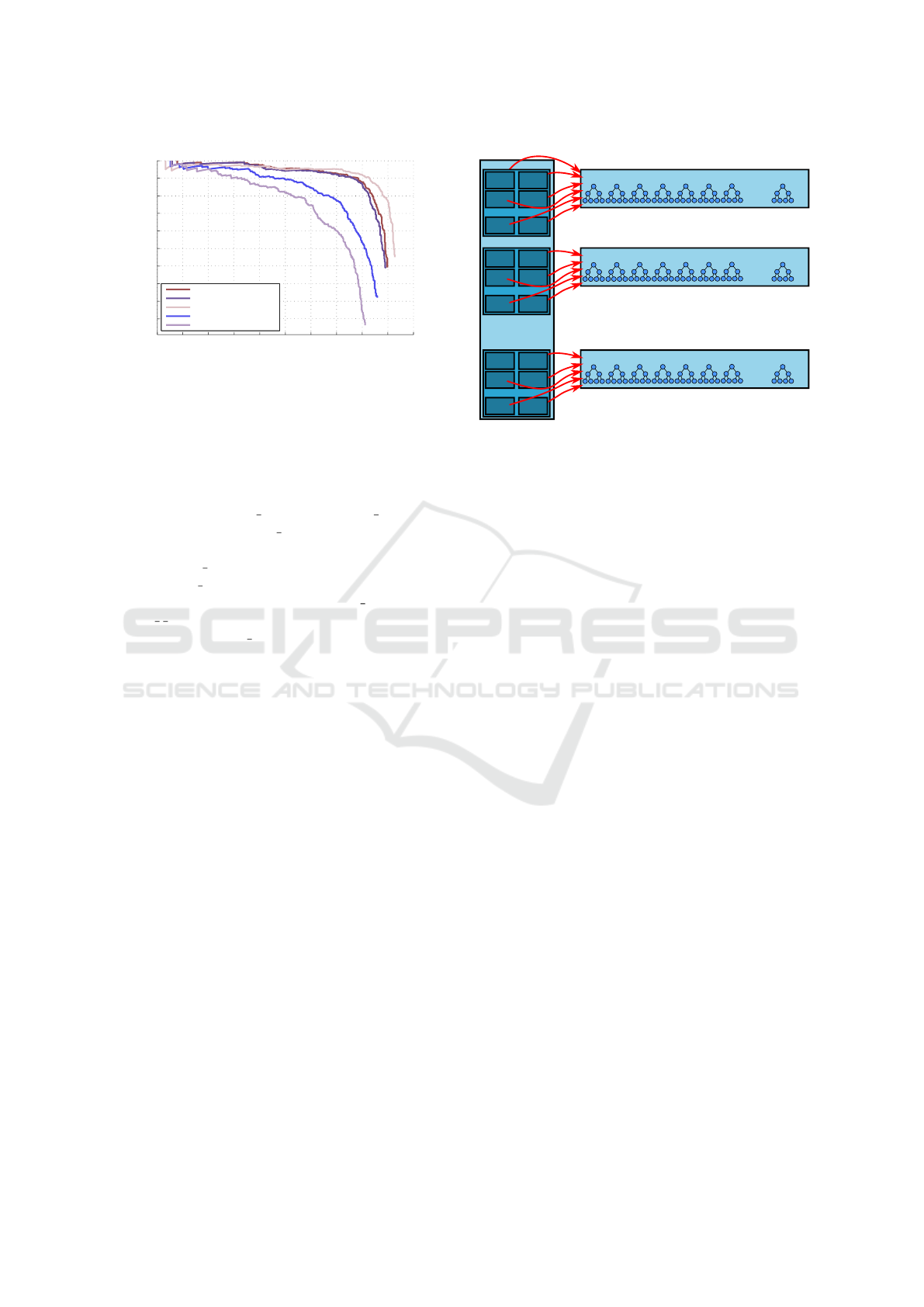
Figure 2: Comparison of the normal ACF to only the co-
arse detector and the coarse fine detector. Detectors with
the 2048 suffix have a coarse detector trained up to a maxi-
mum of 2048 weak classifiers, the others only use 128 weak
classifiers for the weak detector. “ACFOurs” is our baseline
ACF CPU implementation.
Listing 2: Overview of the stage parallel algorithm.
f o r ( i = t h r e a d i d ; i < n u m t r e e s ;
i += b l o c k s i z e )
{
a d d e d s c o r e = w al k T r ee ( )
t o t a l s c o r e +=
bloc kReduceSum ( a d d e d s c o r e )
s y n c t h r e a d s ( )
i f ( t h r e a d i d == 0 and
s c o r e <= t h r e s h o l d )
break
}
affirm the coarse detector’s verdict. While this appro-
ach would give speedups in theory, when testing the
accuracy we could not get close to the original ACF
implementation, using a coarse detector lowers recall
too much. In figure 2 we compare different configura-
tion of the coarse-fine approach to our baseline CPU
implementation. While in theory this approach would
lead to speedups, we perceived a drop in detection
accuracy based on a CPU baseline implementation of
this algorithm. Since accuracy is an important pro-
perty of a pedestrian detection algorithm, we decided
not to pursuit this approach any further.
4.2.3 Stage Parallel
Another option to parallelize the model evaluation of
the ACF algorithm is to look for parallelism somew-
here else. Instead of evaluating each window in pa-
rallel we can also evaluate decision trees in parallel.
This comes at the cost of sometimes having to eva-
luate more trees than necessary. Groups of trees are
evaluated at the same time, so if the results of the first
trees in the group show that evaluation can be stop-
Grid
...
w
96
w
97
w
98
w
99
w
100
w
101
w
102
w
2048
Block
Thread
...
Thread
Thread
Thread
Thread
Thread
Window 75
...
w
96
w
97
w
98
w
99
w
100
w
101
w
102
w
2048
Block
Thread
...
Thread
Thread
Thread
Thread
Thread
Window 125
...
w
96
w
97
w
98
w
99
w
100
w
101
w
102
w
2048
Block
Thread
...
Thread
Thread
Thread
Thread
Thread
Window n
...
...
Figure 3: The stage parallel approach: each thread evaluates
a separate decision tree.
ped, there is no way to stop the other trees in the loop
as they where launched at the same time. Figure 3 gi-
ves an overview of this approach, listing 2 shows the
complete algorithm in pseudo code.
4.2.4 Hybrid Window / Stage Parallel
The window parallel (section 4.2.1) and stage parallel
(section 4.2.3) can also be combined into one. While
digging deeper into the performance of the naive ap-
proach, we can assume that at the start of the evalu-
ation pipeline most windows still have to be evalua-
ted (large opportunity for data parallelism), while it is
only at the later stages (when most windows can be
pruned) that the na
¨
ıve approach loses its advantage. It
is at this transition that the ”stage parallel-approach”
starts gaining potential since the probability of pru-
ning lowers with the amount of decision trees that are
evaluated per window.
As mentioned above we combine these two ap-
proaches by first evaluating n windows in parallel
after which a separate kernel is launched to handle
the remaining kernels. To launch these kernels we
use CUDA Dynamic Parallelism (Jones, 2012). Each
thread that is assigned to a window that is not elimi-
nated after N iterations will launch a separate thread
block which executes the remaining windows.
If dynamic parallelism is not available on the plat-
form we group the indices of windows that are still
“alive” together into an array using a combine ope-
ration (from the thrust library (Bell and Hoberock,
2011)). Each thread in the stage parallel phase then
executes a single item in the resulting array.
GPU Accelerated ACF Detector
245

5 GPU IMPLEMENTATION
SPEED RESULTS
In this section we compare the different implemen-
tation methods in terms of performance. We evalu-
ate our implementation on a desktop workstation (In-
tel(R) Xeon(R) CPU E5-2630 v3 @ 2.40GHz, NVI-
DIA GTX 1080) and the NVIDIA TX2 embedded
platform, hereafter called DES and TX2 respectively.
Tables 1,2 and 3 show a comparison of the average
running time to process one image of a 1920x1080 vi-
deo stream (TownCenter dataset (Benfold and Reid,
2011)) of all our implementations. Feature calcula-
tion is something that scales quite well on GPU. This
is clearly visible in table 1, we get an order of mag-
nitude or more speedup compared to CPU on both
devices. Also interesting is that the performance of
the Tegra TX2 comes close to that of the GTX 1080.
This can be explained by the fact that processing a
1080p image really isn’t that much work, the poten-
tial of such a powerful GPU is thus not fully exploi-
ted. The TX2 on the other hand has fewer CUDA co-
res and is utilized more fully. Also on the TX2 there
is no memory transfer cost (memory can be shared),
compared to the GTX 1080 where the image has to
be copied from host to GPU memory. Model evalua-
tion on the other hand is quite difficult to port to the
GPU. Using the window parallel or the stage paral-
lel approach (section 4.2.1 and 4.2.3 respectively) on
their own does not yield any speedups. Using the win-
dow parallel approach on its own means that a lot of
threads are idling while their neigbours are still doing
work. Using the stage parallel approach on its own
means that to much threads need to be launched, a lot
of them will do unnecessary work as they would be
able to stop sooner had the weak classifiers be eva-
luated sequentially. Using a combination of both ap-
proaches however does yield a, albeit small, speedup
on the GTX 1080 GPU. Although the speed-up of the
evaluation part is limited, we where able to get a large
speed-up in the most computationally expensive part
of the algorithm. For the algorithm as a whole, we
obtained a speed-up of 2.6x on the TX2 board, and
Table 1: Comparison of different approaches for feature cal-
culation.
TX2
Processing time (ms) Speedup
Baseline (CPU) 223 1 ×
GPU 8.7 25.6×
DES
Processing time (ms) Speedup
Baseline (CPU) 74 1 ×
GPU 6.7 11 ×
Table 2: Comparison of different approaches for model eva-
luation.
TX2
Processing time (ms) Speedup
Baseline (CPU) 63 1 ×
Window par. 165 0.38 ×
Stage par. 933 0.068 ×
Hybrid 75 0.84 ×
DES
Processing time (ms) Speedup
Baseline (CPU) 31 1 ×
Window par. 76 0.4 ×
Stage par. 2228 0.014 ×
Hybrid 20 1.6 ×
Table 3: Comparison of total processing times, with the ex-
ception of “Baseline (CPU)” feature calculation is done on
GPU.
TX2
Processing time (ms) Speedup
Baseline (CPU) 290 1 ×
Window par. 202 1.44 ×
Stage par. 1009 0.29 ×
Hybrid 112 2.6 ×
DES
Processing time (ms) Speedup
Baseline (CPU) 106 1 ×
Window par. 84 0.8 ×
Stage par. 2286 0.046 ×
Hybrid 28 3.8 ×
even 3.8x on a desktop system compared to an alre-
ady heavily optimized CPU implementation.
6 DETECTOR COMPARISON
Apart from evaluating our implementation to a base-
line ACF implementation we also find it important to
compare it to the currently best performing object de-
tectors. In this section we evaluate how well our GPU
implementation of ACF, and the ACF detector in ge-
neral stacks up against the state-of-the-art YOLOv2
detector.
In terms of accuracy the YOLOv2 detector ap-
pears to perform better than the ACF detector trained
on the Inria dataset (Dalal and Triggs, 2005). Figure 4
shows a comparison between both detectors evaluated
on the Inria dataset. ACF has the lowest average pre-
cision. YOLOv2, the standard YOLOv2 multi object
detector trained on COCO (Lin et al., 2014) does bet-
ter than ACF with an average precision of 98% com-
pared to 90%, both evaluated on the Inria test set.
While accuracy is an important property of an ob-
ject detector, on an embedded platform running speed
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
246
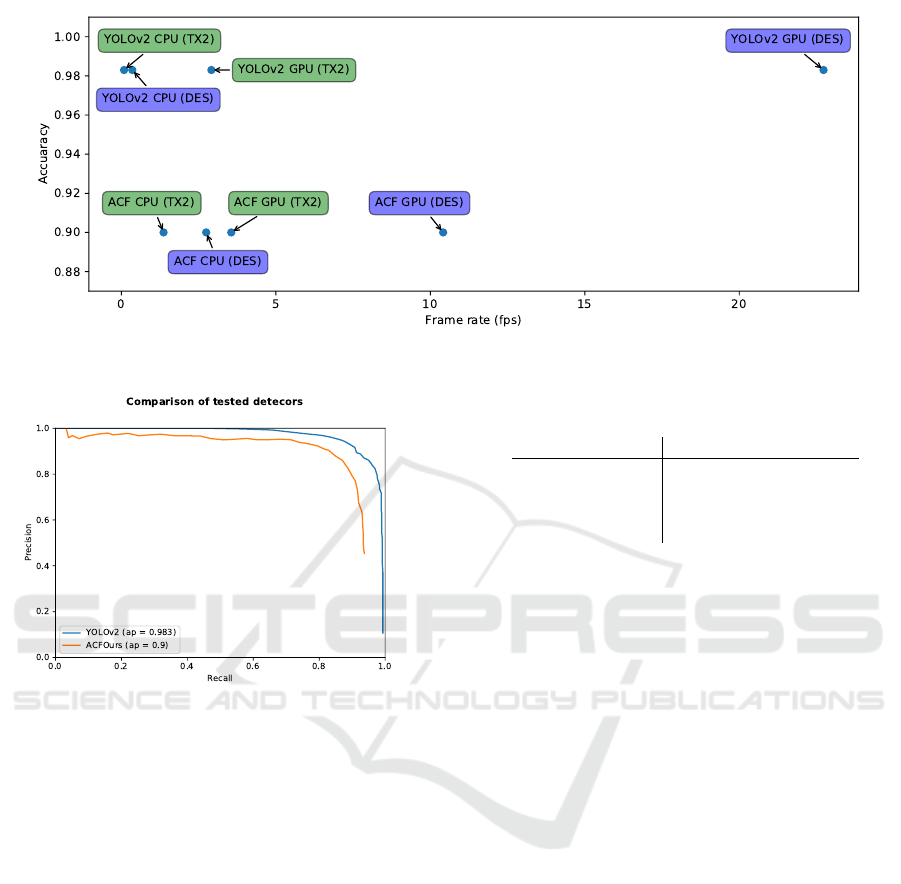
Figure 5: Comparison of the tested detectors in both speed and accuracy.
Figure 4: Comparison between tested detectors, “ACFOurs”
represents our ACF implementations, “YOLOv2” is the
standard YOLOv2 object detector.
is a criteria that is at least as important. In table 4
we compare the tested detectors in terms of running
speed. Because the main purpose of our ACF imple-
mentation was to use it in conjunction with some sort
of scene constraints, which only require evaluation of
one scale, we only have an implementation to evalu-
ate one scale. The results in the table are estimations
based on the speedups we got in section 5. As be-
fore the speed of the different detectors are tested on
the 1920x1080 TownCenter dataset. In terms of speed
the GPU ACF port still appears to perform better on
TX2 compared to YOLOv2 (281 ms vs 343 ms). On
the desktop GPU however, this is not the case. YO-
LOv2 is more than twice as fast as the ACF GPU port.
If there is no GPU available on the system the clear
winner is ACF. ACF is still capable of running quite
fast on CPU alone, YOLOv2 is much slower making
it unusable on CPU for time sensitive applications.
Figure 5 visualises the speed / accuracy trade-off.
Table 4: Comparison of total processing times of the tested
detectors on both CPU and GPU.
DES (ms) TX2 (ms)
ACF (CPU) 364 731
ACF (GPU) 96 281
YOLOv2 (CPU) 2805 11289
YOLOv2 (GPU) 44 343
7 CONCLUSION
In this paper we described how a pre-deep lear-
ning detector which uses handcrafted features such as
ACF, can be sped up by utilizing the GPU. We evalu-
ated our GPU implementation on two platforms, the
embedded Jetson TX2 GPU platform, and a desktop
equipped with a NVIDIA GTX 1080. While the ACF
detector does not lend itself easily to big speedups by
parallelizing (especially the evaluation step) we still
managed to get some significant speed increases on
both tested platforms. Compared to the state-of-the-
art deep learning detector YOLOv2 we still manage
to get the fastest detections using the GPU ACF met-
hod on a TX2. YOLOv2 is however more accurate, as
could be expected taking into account the fast (deep
learning based) evolution object detection techniques
have seen in recent years. It is likely that in the fu-
ture deep learning methods, will overtake traditional
methods in the field of real time embedded systems as
they have with much of the rest of the field of object
detection. As for right now, we would say that tra-
ditional methods still have their place on embedded
platforms.
The tested deep learning methods do also require
the presence of a powerful GPU, if no GPU is pre-
sent, as is the case with many low-power embedded
platforms (the TX2 is an exception in this case), tra-
GPU Accelerated ACF Detector
247

ditional methods still win by a wide margin in terms
of speed.
ACKNOWLEDGMENTS
This work is supported by the agency Flanders In-
novation & Entrepreneurship (VLAIO) and the com-
pany Robovision.
REFERENCES
Bell, N. and Hoberock, J. (2011). Thrust: A productivity-
oriented library for cuda. GPU computing gems Jade
edition, 2:359–371.
Benfold, B. and Reid, I. (2011). Stable multi-target tracking
in real-time surveillance video. In CVPR, pages 3457–
3464.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Doll
´
ar, P., Appel, R., Belongie, S., and Perona, P. (2014).
Fast feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 36(8):1532–1545.
Doll
´
ar, P., Tu, Z., Perona, P., and Belongie, S. (2009). Inte-
gral channel features.
Felzenszwalb, P., McAllester, D., and Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable
part model. In Computer Vision and Pattern Recog-
nition, 2008. CVPR 2008. IEEE Conference on, pages
1–8. IEEE.
Freund, Y. and Schapire, R. E. (1995). A desicion-theoretic
generalization of on-line learning and an application
to boosting. In European conference on computatio-
nal learning theory, pages 23–37. Springer.
Jones, S. (2012). Introduction to dynamic parallelism. In
GPU Technology Conference Presentation S, volume
338, page 2012.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. C. (2016). Ssd: Single shot mul-
tibox detector. In European conference on computer
vision, pages 21–37. Springer.
Obukhov, A. (2011). Haar classifiers for object detection
with cuda. GPU Computing Gems Emerald Edition,
pages 517–544.
Pedersoli, M., Vedaldi, A., Gonzalez, J., and Roca, X.
(2015). A coarse-to-fine approach for fast deformable
object detection. Pattern Recognition, 48(5):1844–
1853.
Redmon, J. and Farhadi, A. (2016). Yolo9000: Better, fas-
ter, stronger. arXiv preprint arXiv:1612.08242.
Tijtgat, N., Ranst, W. V., Volckaert, B., Goedem
´
e, T., and
Turck, F. D. (2017). Embedded real-time object de-
tection for a UAV warning system. 1st International
Workshop on Computer Vision for UAVs.
Van Beeck, K. (2016). The automatic blind spot camera:
hard real-time detection of moving objects from a mo-
ving camera.
Viola, P., Jones, M. J., and Snow, D. (2003). Detecting
pedestrians using patterns of motion and appearance.
In null, page 734. IEEE.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
248
