
Wastewater Treatment Plant Design: Optimizing Multiple Objectives
Roman Denysiuk
1
, Isabel Esp
´
ırito Santo
1,2
and Lino Costa
1,2
1
Algoritmi R&D Center, University of Minho, Portugal
2
Department of Production and Systems Engineering, University of Minho, Portugal
Keywords:
Multiobjective Optimization, Many-objective Optimization, Wastewater Treatment Optimization.
Abstract:
The high costs associated with the design of wastewater treatment plants (WWTPs) motivate the research in
the area of modelling their construction and the water treatment process optimization. This work addresses
different methodologies, which are based on defining and simultaneously optimizing several conflicting ob-
jectives, for finding the optimal values of the state variables in the plant design. We use an evolutionary
many-objective optimization algorithm with clustering-based selection that proved effective in handling chal-
lenging optimization problems with a large number of objectives. The obtained results are promising and with
physical meaning. It is shown that the overall WWTP design can be improved by coming up with appropriate
formulation of the optimization problem and solving approach.
1 INTRODUCTION
The high costs associated with the design and oper-
ation of wastewater treatment plants (WWTPs) mo-
tivate the research in the area of WWTP modelling
and the water treatment process optimization. The
WWTP design involves optimizing simultaneously
several conflicting objectives, for finding the optimal
values of the state variables. These problems are
called multiobjective optimization problems.
Without loss of generality, a multiobjective opti-
mization problem with m objectives and n decision
variables can be formulated mathematically as fol-
lows:
minimize: F(x) = ( f
1
(x),..., f
m
(x))
T
subject to: g(x) ≤ 0
h(x) = 0
x ∈ Ω
(1)
where x is the decision vector defined in the decision
space Ω = {x ∈ R
n
: l ≤ x ≤ u}, l and u are the lower
and upper bounds of the decision variables, respec-
tively, g(x) is the inequality constraints vector, h(x) is
the equality constraints vector, and F(x) is the objec-
tive vector defined in the objective space F
m
. When
m > 3, the problem in (1) is often referred to as many-
objective optimization problem.
The presence of multiple objectives makes the ob-
jective space partially ordered. For comparing dif-
ferent solutions under such circumstances, the con-
cept of the Pareto dominance is commonly used. A
solution a is said to dominate a solution b, denoted
as a ≺ b, iff ∀i ∈ {1,...,m} : f
i
(a) ≤ f
i
(b) and
∃ j ∈ {1,...,m} : f
j
(a) < f
j
(b). Opposing single-
objective optimization, the solution to multiobjective
optimization problems is not a single solution, but
a set of non-dominated solutions called the Pareto-
optimal set. A solution a is called Pareto optimal, iff
@b ∈ Ω : b ≺ a, or there is no feasible solution b such
that b dominates a. The main goal of the multiobjec-
tive optimization is to obtain the set of Pareto optimal
solutions.
In this work, two distinct approaches to the
WWTP design optimization problem are proposed. In
the first approach, the WWTP is optimized in terms
of the secondary treatment by simultaneously mini-
mizing the sum of investment and operation costs and
maximizing the effluent quality, in a way that the strict
laws on effluent quality are accomplished. The sec-
ond approach consists of optimizing the WWTP de-
sign by simultaneously minimizing the variables that
most influence the operation and investment costs as
well as the effluent quality. This approach results in a
many-objective optimization problem.
Classical methods for solving multiobjective op-
timization problems mostly rely on scalarization,
which means converting multiple objectives into a
single objective function that depends on some pa-
rameters. The resulting single-objective problem is
solved to find a single Pareto optimal solution. Re-
peated runs with different parameter settings are used
Denysiuk, R., Santo, I. and Costa, L.
Wastewater Treatment Plant Design: Optimizing Multiple Objectives.
DOI: 10.5220/0006660303270334
In Proceedings of the 7th International Conference on Operations Research and Enterprise Systems (ICORES 2018), pages 327-334
ISBN: 978-989-758-285-1
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
327

to find multiple Pareto optimal solutions (Miettinen,
1999).
Alternatively, evolutionary algorithms have
emerged as a powerful tool for solving multiobjective
optimization problems. Evolutionary algorithms are
stochastic problem solving techniques whose work-
ing mechanism is based on mimicking the principles
of natural evolution. Evolutionary algorithms are
particularly suitable for solving multiobjective opti-
mization problems because they simultaneously deal
with a set of possible solutions, called population.
This feature allows to find several members of the
Pareto optimal set in a single run of the algorithm,
instead of having to perform series of separate runs
that can be infeasible in practice.
Multiobjective evolutionary algorithms (MOEAs)
are often differentiated based on the selection mech-
anism. Dominance-based algorithms rely on the con-
cept of the Pareto dominance typically combined
with some diversity preserving technique (Deb et al.,
2002). Decomposition-based approaches decom-
pose an original problem into several subproblems
and solve them in parallel (Zhang and Li, 2007).
Indicator-based algorithms seek to improve the val-
ues of quality indicators for the current Pareto set
approximations in attempt to direct the search (Zit-
zler and K
¨
unzli, 2004). Despite the success in var-
ious application domains, MOEAs often exhibit cer-
tain limitations. For instance, dominance-based selec-
tion can be ineffective in maintaining diversity (Deny-
siuk and Gaspar-Cunha, 2017a) and for problems
with a large number of objectives. The performance
of decomposition-based approaches can be highly in-
fluenced by the type of the chosen decomposition
scheme (Denysiuk and Gaspar-Cunha, 2017b). The
applicability of indicator-based algorithms can be
limited by a high computational cost.
As this study considers the WWTP design by
applying different optimization approaches, includ-
ing the one requiring the simultaneous optimization
of a large number of objectives, it is of critical im-
portance to adopt an appropriate problem solving
strategy. Due to exhibited competitiveness on a set
of challenging many-objective problems, we use an
evolutionary many-objective optimization algorithm
with clustering-based selection (EMyO/C) (Denysiuk
et al., 2014). In EMyO/C, the Pareto dominance-
based selection leads to a set of solutions naturally
reflecting the notion of optimality in multiobjective
optimization, clustering specifically adapted to many-
objectiveoptimizationensuresscalability andadequate
diversity of solution, whereas a modified differential
evolution operator provides an effective exploration of
the complex search space of the WWTP model.
2 MATHEMATICAL MODEL
A typical WWTP comprises a primary and secondary
treatment of the wastewater. This work focuses solely
on the secondary treatment, in particular on an acti-
vated sludge system. This system consists of an aer-
ation tank and a secondary settler, which are mathe-
matically described by the ASM1 model (Henze et al.,
1986) and the ATV model combined with the double
exponential model (Esp
´
ırito Santo et al., 2006), re-
spectively.
2.1 Mass Balances around Aeration
Tank
The first set of equations come from the mass bal-
ances around the aeration tank. The Peterson matrix
of the ASM1 model (Henze et al., 1986) is used to
define the model for the mass balances. This model
is widely accepted by the scientific community, as it
produces good predictive values by simulation (Alex
et al., 2008). For a CSTR (completely stirred tank
reactor), it is assumed that the mass of a given com-
ponent entering the tank minus the mass of the same
compound in the tank, plus a reaction term (positive
or negative) equals the accumulation in the tank of the
same compound:
Q
V
a
(ξ
in
− ξ) + r
ξ
=
dξ
dt
. (2)
It is convenient to refer that in a CSTR the concen-
tration of a compound is the same at any point inside
the reactor and at the effluent of that reactor. The reac-
tion term for the compound in question, r
ξ
, is obtained
by the sum of the product of the stoichiometric coeffi-
cients, ν
ξ j
, with the expression of the process reaction
rate, ρ
j
, of the ASM1 Peterson matrix (Henze et al.,
1986)
r
ξ
=
∑
j
ν
ξ j
ρ
j
. (3)
In steady state, the accumulation term given by
dξ
dt
is zero, because the concentration of a given com-
pound is constant in time. The ASM1 model in-
volves 8 processes incorporating 13 different compo-
nents. The mass balances for the inert materials, S
I
and X
I
, are not considered because they are transport-
only components.
The processes involved are aerobic growth of het-
erotrophs, anoxic growth of heterotrophs, aerobic
growth of autotrophs, decay of heterotrophs, decay of
autotrophs, ammonification of soluble organic nitro-
gen, hydrolysis of entrapped organics, and hydrolysis
of entrapped organic nitrogen.
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
328

The equation obtained from the ASM1 model with
mass balances is as follows. For example, to the sol-
uble substrate (S
S
)
Q
V
a
(S
S
in
− S
S
) −
1
Y
H
ρ
1
−
1
Y
H
ρ
2
+ ρ
7
= 0. (4)
The other components are slowly biodegradable sub-
strate (X
S
), heterotrophic active biomass (X
BH
), au-
totrophic active biomass (X
BA
), particulate products
arising from biomass decay (X
P
), nitrate and nitrite
nitrogen (S
NO
), NH
+
4
+ NH
3
nitrogen (S
NH
), solu-
ble biodegradable organic nitrogen (S
ND
), particu-
late biodegradable organic nitrogen (X
ND
), alkalinity
(S
alk
), oxygen (S
O
), where Y
H
is a stoichiometric pa-
rameters. For oxygen mass transfer, aeration by dif-
fusion is considered.
2.2 Secondary Settler Constraints
Traditionally, the importance of the secondary settler
is underestimated when compared with the aeration
tank. However, it plays a crucial role in the acti-
vated sludge system. For example, the clarification
efficiency of the settling tank has great influence on
the treatment plant efficiency because the particulate
fraction arising from biomass contributes to the ma-
jor portion of the effluent COD. Further, it has been
observed that the investment cost of a typical settling
tank in a WWTP context could reach 25% of the to-
tal (Zeng et al., 2003). Thus, when trying to reduce
both investment and operation costs, the importance
of the secondary settler is by far emphasized.
When the wastewater leaves the aeration tank,
where the biological treatment took place, the treated
water should be separated from the biological sludge,
otherwise, the COD would be higher than it is at
the entry of the system. The most common way of
achieving this purpose is by sedimentation in tanks.
The behavior of a settling tank depends on its de-
sign and operation, namely the hydraulic features, as
the flow rate, the physical features, as inlet and sludge
collection arrangements, site conditions, as tempera-
ture and wind, and sludge characteristics. The fac-
tors that most influence the size of the tank are the
wastewater flow and the characteristics of the sludge.
As the influent flow is known, the optimization of the
sedimentation area and depth must rely on the sludge
characteristics, which in turn are related with the per-
formance of the aeration tank. So, the operation of the
biological reactor influences directly the performance
of the settling tank and for that reason, one should
never be considered without the other.
The details of the used settling tank model can be
found in (Esp
´
ırito Santo et al., 2006).
2.3 Composite Variables
In a real system, some state variables are, most of the
time, not available from direct measurements. Thus,
readily measured composite variables are used in-
stead. We used the particulate chemical oxygen de-
mand, soluble chemical oxygen demand, chemical
oxygen demand, volatile suspended solids, total sus-
pended solids, biochemical oxygen demand, total ni-
trogen of Kjeldahl, and total nitrogen.
2.4 Quality Constraints
Quality constraints are usually derived from environ-
mental law restrictions. The most used are related
with limits in COD, N, and T SS at the effluent. In
mathematical terms, these constraints are defined as:
COD
e f
≤ COD
law
N
e f
≤ N
law
(5)
T SS
e f
≤ T SS
law
where the subscript “e f ” stands for effluent.
2.5 Flow and Mass Balances
The system behavior, in terms of concentration and
flows, may be predicted by balances. In order to
achieve a consistent system, these balances must be
done around the entire system and not only around
each unit operation. This is crucial to reinforce the
robustness of the model. Furthermore, these balances
may not be a sum of the mass balances of the indi-
vidual components since the PWWF events are con-
templated in the ATV design included in the settler
modelling. The balances were done to the suspended
matter, dissolved matter and flows.
2.6 System Variables Definition
To complete the model, some definitions are added,
such as sludge retention time, hydraulic retention
time, recycle rate, recycle rate in a PWWF event, re-
cycle flow rate during a PWWF event, and maximum
overflow rate. A fixed value for the relation between
volatile and total suspended solids was also consid-
ered (Esp
´
ırito Santo et al., 2006).
2.7 Simple Bounds
All variables must be nonnegative, although more re-
stricted bounds are imposed on some of them due to
operational consistencies (Esp
´
ırito Santo et al., 2006).
Wastewater Treatment Plant Design: Optimizing Multiple Objectives
329

3 ALGORITHM
The evolutionary many-objective optimization al-
gorithm with clustering-based selection (EMyO/C)
starts by randomly generating a population of solu-
tions P and computing the components of a reference
point as
z
j
= min
1≤i≤µ
f
j
(x
i
) (6)
for j = 1, . . . ,m where µ is a population size.
Thereafter, the population is evolved for a fixed
number of generations g
max
. Each generation em-
braces producing an offspring population Q in the
variation procedure that is merged with P and reduced
to the size of µ in the replacement procedure.
The variation procedure relies on a modified dif-
ferential evolution (DE) operator presented in (Deny-
siuk et al., 2013). Each individual in P produces sin-
gle offspring, which can be described as follows. Two
different individuals x
1
and x
2
are randomly selected
from P. A mutation vector v is computed as
v
j
=
x
1
j
− x
2
j
+ δ
j
(u
j
− l
j
) if r
j
≤ p
m
x
1
j
− x
2
j
otherwise
(7)
with
δ
j
=
(
(2u
j
)
1
η
m
+1
− 1 if u
j
≤ 0.5
1 − (2 − 2u
j
)
1
η
m
+1
otherwise
(8)
where r
j
and u
j
are random numbers from U(0,1) for
j = 1,...,n, whereas p
m
and η
m
are control parame-
ters. The obtained mutation vector is restricted as
v
j
=
−ρ
j
if v
j
< −ρ
j
ρ
j
if v
j
> ρ
j
v
j
otherwise
(9)
where ρ
j
= (u
j
− l
j
)/2 for j = 1, . . . , n. An offspring
x
0
is generated by mutating the parent as
x
0
j
=
x
j
+ v
j
if ξ
j
≤ CR
x
j
otherwise
(10)
where CR is a control parameter of the DE operator
and ξ
j
∼ U(0,1). Lastly, the offspring feasibility is
ensured as
x
0
j
=
l
j
if x
0
j
< l
j
u
j
if x
0
j
> u
j
(11)
for j = 1,...,n. The resulting offspring x
0
is com-
pared with its parent x. If necessary the above de-
scribed steps - including computation of v, mutation
restriction, and creation of x
0
- are performed until x
0
differs from x in at least one gene. The offspring is
evaluated and the components of the reference point
are updated if there are smaller objective values.
The replacement procedure forms the population
of the next generation by selecting promising indi-
viduals from the multiset composed of the current
and offspring populations. The nondominated sort-
ing is performed to sort individuals into different non-
dominated fronts. In order to handle constraints, the
constrained-domination principle (Deb et al., 2002)
is used. Under this principle, solution a is said to
constrained-dominate solution b, if any of the follow-
ing conditions is true: (i) solution a is feasible and
solution b is not, (ii) solutions a and b are both infea-
sible, but solution a has a smaller overall constraint
violation, (iii) solutions a and b are feasible and solu-
tion a dominates solution b. For a given solution, the
overall constraint violation cv is calculated as:
cv =
p
∑
i=1
max{0,g
i
(x)} +
q
∑
j=1
|h
j
(x)|. (12)
where g
i
(x) ≤ 0 for i = {1, . .., p} and h
i
(x) = 0 for
j = {1, . . . , q} are inequality and equality constraints.
Then, each front is added to the new population one at
a time until the predefined population size is reached.
In case when the last accepted front F
l
cannot be com-
pletely accommodated, k best individuals are selected
from F
l
as follows.
For each individual in F
l
, the objectives are pro-
jected onto the unit hyperplane as
f
j
=
f
j
− z
j
k f − zk
1
∀i ∈ {1,...,m}. (13)
Using these values, k clusters are formed as follows.
Step 1 Initially, each individual belongs to a sepa-
rate cluster C = {C
1
,...,C
|F
l
|
}.
Step 2 If |C| = k, stop. Otherwise, go to Step 3.
Step 3 For each pair of clusters, the distance be-
tween two clusters d
12
is calculated as
d
12
=
1
|C
1
||C
2
|
∑
i∈C
1
, j∈C
2
d(i, j) (14)
where d(i, j) is the Euclidean distance between in-
dividuals i and j.
Step 4 The pair of clusters having the smallest dis-
tance is merged. Go to Step 2.
In each cluster, a representative is identified and se-
lected to the new population. Specifically, a cluster
representative is an individual having the smallest dis-
tance to the reference point among the individuals in
the same cluster.
4 MULTIOBJECTIVE APPROACH
In this section, the WWTP design is optimized by
minimizing the total cost function and maximizing the
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
330
effluent quality measured by the quality index func-
tion.
4.1 Total Cost Function
The cost function represents the total cost and in-
cludes both investment (IC) and operation (OC) costs.
To obtain the cost function based on real data, a study
was carried out with a WWTP building company and
relevant parameters were estimated by a least squares
technique for a basic model (Tyteca, 1976).
The investment cost for the aeration tank is
IC
a
= 148.6V
1.07
a
+ 7737G
0.62
S
(15)
where V
a
is the volume and the air flow G
S
.
The operation cost for the aeration tank is
OC
a
=
h
0.01Γ + 0.02Γ (1 + i)
−10
i
148.6V
1.07
a
+ (1 + i)
−10
7737G
0.62
S
+ 115.1ΓP
c
G
S
, (16)
where the term (1 + i)
−10
is used to bring to present a
future value, in this case, 10 years from now, and Γ is
a term used to bring this value to the present.
The investment cost for the settling tank is
IC
s
= 955.5A
0.97
s
. (17)
The operation cost function for the settling tank is
OC
s
=
h
0.01Γ + 0.02Γ (1 + i)
−10
i
148.6(A
s
h)
1.07
.
(18)
Lastly, the total cost function (TC) is given by the
sum of all the previous functions
TC = 174.2V
1.07
a
+ 12487G
0.62
S
+ 114.8G
S
+ 955.5A
0.97
s
+ 41.3(A
s
h)
1.07
. (19)
4.2 Quality Index Function
A quality index function is used to measure the
amount of pollution in the effluent. It can be use-
ful to attain a required level of effluent quality. The
BSM1 model (Alex et al., 2008) defines the quality
index (QI) by measuring the amount of daily pollu-
tion in average terms during seven days
QI = (2 T SS +COD + 2 BOD
+ 20T KN + 2 S
NO
)Q
e f
/1000. (20)
where T SS is the total of suspended solids, COD is
the chemical oxygen demand, BOD is the biochemi-
cal oxygen demand, T KN is the total Kjeldahl nitro-
gen, S
NO
is the nitrate and nitrite nitrogen and Q
e f
is
the effluent flow.
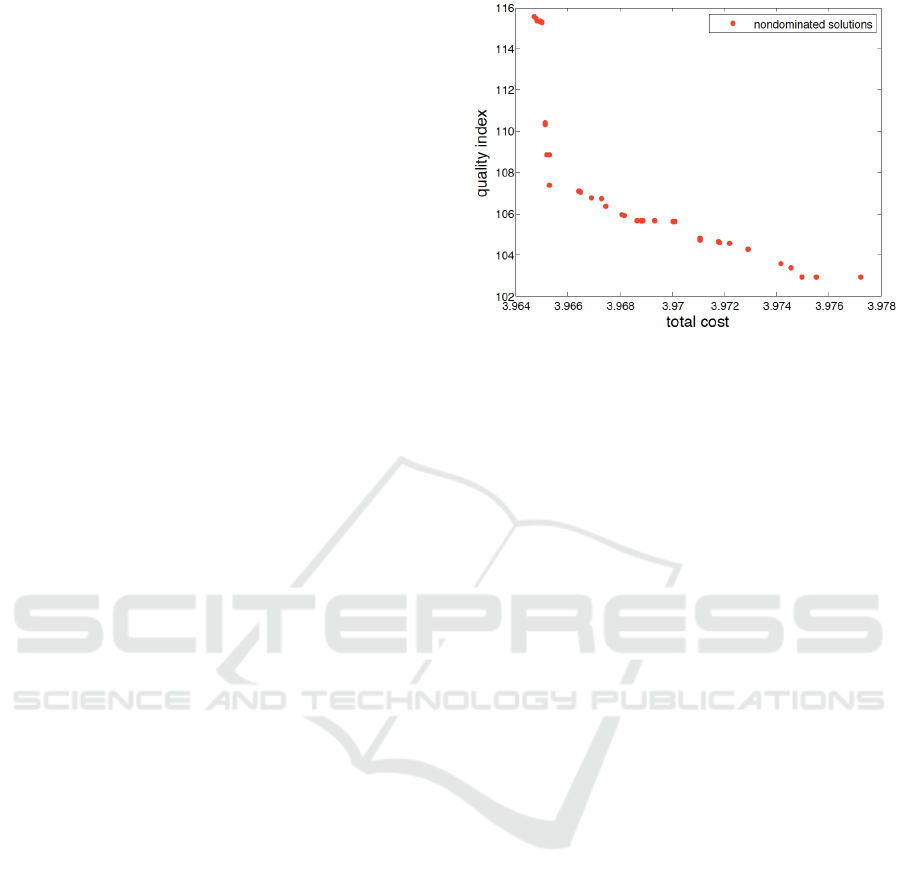
Figure 1: Trade-off curve for the total cost and quality in-
dex.
4.3 Results
This approach resulted in optimization problem with
2 objective functions, 115 decision variables being
bounded below and above, an inequality constraint
and 99 equality constraints. Due to a highly con-
strained search space, first a feasible solution was
found. For this, 30 independent runs of EMyO/C were
performed setting µ = 1000, g
max
= 1000, CR = 0.15,
η
m
= 20 and p
m
= 1/n. Then, the best found solu-
tion among all the runs was improved by a single-
objective optimizer, HGPSAL (Esp
´
ırito Santo et al.,
2010). In order to obtain a set of Pareto optimal solu-
tions, another 30 independent runs of EMyO/C were
performed setting µ = 300, g
max
= 300 and introduc-
ing the obtained feasible solution into the initial pop-
ulation.
Figure 1 depicts all nondominated solutions ob-
tained after the performed experiments. The values of
the TC are in millions of euros (M e). In this figure,
the compromise solutions representing trade-offs be-
tween the total cost (TC) and quality index (QI) are
plotted. It can be seen that the proposed approach to
the WWTP design produces results with a physical
meaning. Specifically, the lower values of the qual-
ity index can be achieved through the increase in the
total cost, while the smaller values of the total cost re-
sult in the larger amount of pollution in the effluent,
measured by the quality index.
In Table 1, the objective values along with the
most important decision variables of the obtained
trade-off solutions are presented, namely, the aeration
tank volume (V
a
), the air flow rate (G
S
), the sedimen-
tation area (A
s
), the settler tank depth (h), the total
nitrogen (N), the chemical oxygen demand (COD),
and the total suspended solid (T SS). The presented
solutions are obtained after applying clustering pro-
Wastewater Treatment Plant Design: Optimizing Multiple Objectives
331

Table 1: Optimal values for the most important variables obtained using multiobjective approach.
V
a
G
S
A
s
h N COD T SS TC(M e) QI
100 6597.8531 271.7075 1 1.8982 125 10.7124 3.9647 115.5605
100 6598.438 271.7075 1 1.8982 125 10.4436 3.9649 115.3593
100 6598.9164 271.7075 1 1.3069 125 11.7056 3.9651 110.4133
100 6599.3342 271.7075 1 1.0247 125 11.7056 3.9653 108.8466
100 6599.363 271.7075 1.0637 0.90931 125 10.8241 3.9664 107.1068
100 6599.363 271.7075 1.0906 0.77282 125 10.8241 3.9669 106.7584
100 6599.363 271.7075 1.1116 0.83292 125 10.9469 3.9673 106.7376
100 6599.363 271.7075 1.1208 0.77282 125 10.8241 3.9674 106.3607
100 6599.363 271.7075 1.1598 0.71443 125 10.8241 3.9681 105.9032
100 6599.363 271.7075 1.1876 0.64562 125 10.82 3.9686 105.6695
100 6599.363 271.7075 1.1961 0.64562 125 10.82 3.9688 105.6695
100 6599.363 271.7075 1.2245 0.64562 125 10.82 3.9693 105.6695
100 6599.363 271.7075 1.2649 0.64562 125 10.7742 3.97 105.6352
100 6599.363 271.7075 1.3209 0.53704 125 10.8241 3.971 104.7857
100 6599.363 271.7075 1.3631 0.55629 125 10.8241 3.9718 104.6122
100 6599.363 271.7075 1.3835 0.55629 125 10.8241 3.9722 104.5415
100 6599.363 271.7075 1.4222 0.50336 125 10.8241 3.9729 104.2785
100 6599.363 271.7075 1.4924 0.32773 125 10.8241 3.9742 103.5757
100 6599.363 271.7075 1.5123 0.32773 125 10.8241 3.9745 103.3636
100 6599.363 271.7075 1.5359 0.32773 125 10.8241 3.9749 102.9405
100 6599.363 271.7075 1.5661 0.32773 125 10.8241 3.9755 102.9405
100 6599.363 271.7075 1.6586 0.34713 125 10.9389 3.9772 102.9399
cedure to group the data in the objective space. This
way, each solution represents a distinct cluster, hence
a different part of the trade-off curve. This procedure
allows to reduce the number of points, thereby facili-
tating the visualization of the results. Thus, different
design perspectives can be easily observed from the
obtained solutions.
It can be seen that the aeration tank volume and
the sedimentation area maintain the same values in
all the presented solutions. Only the slight variation
in a few solutions is observed concerning the air flow
rate, whereas the settler depth has the larger variation
in the values between all the variables composing the
cost function. This hints that the lower cost as well as
the desirable values of the quality index can be mostly
achieved through controlling the settler depth. Fur-
thermore, it can be seen that the chemical oxygen de-
mand is at the highest allowable level (125), whereas
the total nitrogen and the total suspended solid are far
below the law limits (15 and 35, respectively).
Moreover, there is not a significant difference in
the total cost in the various solutions, giving some
freedom in the design. For example, the QI in the
first part of the solutions decreases significantly for a
small increase in the TC.
5 MANY-OBJECTIVE APPROACH
In this section, the WWTP design is addressed by
simultaneously optimizing the most influential vari-
ables in the cost and quality index functions.
5.1 Results
To avoid the use of cost functions that are time and
local dependent, the variables influencing the invest-
ment and operation costs of a WWTP in each unit
operation are used as separate objectives. The vari-
ables that mostly influence the costs associated with
the aeration tank are the volume (V
a
) and the air flow
(G
S
). In terms of investment, the first variable in-
fluences directly the cost of the construction of the
tank, and the second influences the required power of
the air pumps. In terms of operation, both variables
will determine the power needed to aerate the sludge
properly, as well as the maintenance, in terms of elec-
tromechanical and civil construction material due to
deterioration. Assuming that the settling process is
only due to the gravity, the variables that most influ-
ence the costs associated with the secondary settler
are the sedimentation area (A
s
) and the tank depth (h),
for obvious reasons.
Concerning the quality index function, each vari-
able on the right-hand side of (20) is considered as
a distinct function, thereby adding to the optimiza-
tion problem six different objectives. In contrast to
the previous formulation, this approach resulted in
the optimization problem with 10 objective functions.
EMyO/C was applied to the resulting problem setting
µ = 300, g
max
= 750 while keeping the remaining pa-
rameters as in the previous experiments and introduc-
ing the feasible solution into the initial population.
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
332
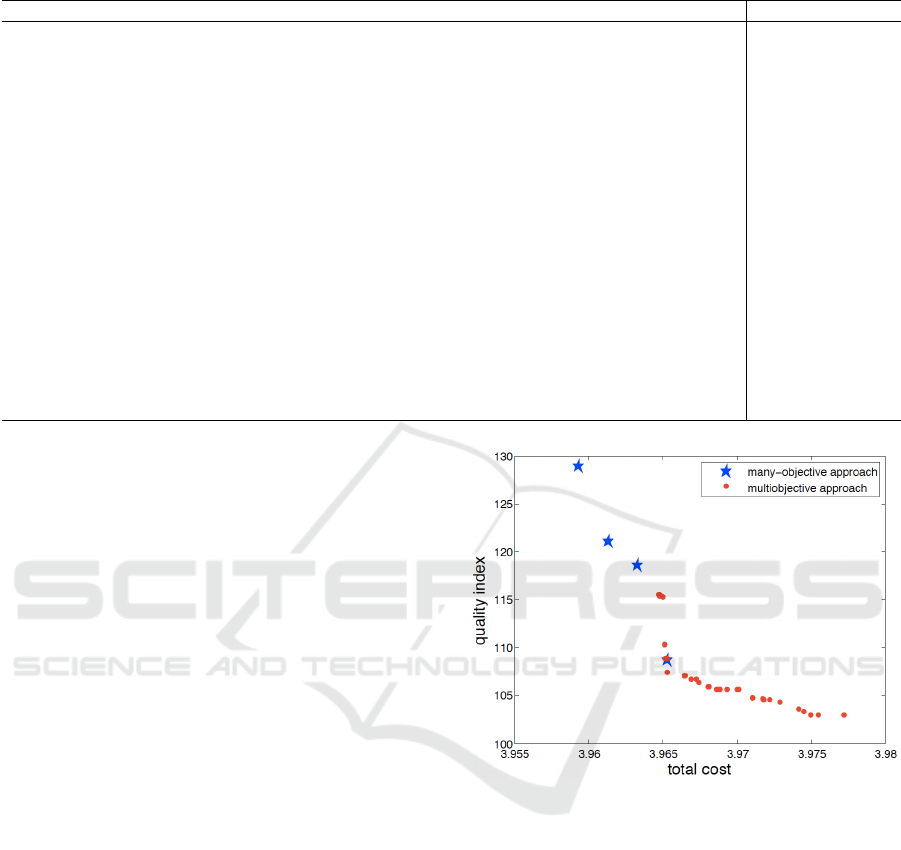
Table 2: Optimal values for the most important variables obtained using many-objective approach.
V
a
G
S
A
s
h N COD T SS BOD T KN S
NO
Q
e f
TC(M e) QI
100 6594.3023 271.7075 1 2.8161 124.2268 11.8656 61.1615 2.8064 0.0802 374.6088 3.9633 122.8764
100 6594.3023 271.7075 1 2.8171 124.1447 19.2583 61.0899 2.8064 0.0802 374.6306 3.9633 128.3383
100 6594.3023 271.7075 1 2.8453 124.3486 29.1979 57.9506 2.8064 0.0802 373.5855 3.9633 133.1374
100 6594.3023 271.7075 1 2.9506 124.2268 11.3468 61.2184 2.8064 0.0802 373.7916 3.9633 122.2631
100 6599.363 271.7075 1 3.2074 123.4647 34.0113 60.1686 3.2387 0.0802 373.2369 3.9653 141.1593
100 6589.2416 271.7075 1.3647 2.1974 125 19.7987 60.7109 1.9417 0.0802 373.4868 3.9678 121.9279
100 6594.3023 271.7075 1.3849 3.2028 123.374 25.6511 61.0103 3.2387 0.0802 374.5473 3.9702 135.9887
100 6599.363 271.7075 1.3036 2.4526 124.136 15.4315 60.4597 2.374 0.0802 373.1675 3.9707 121.2809
100 6599.363 271.7075 1.4351 3.2256 122.8556 34.5301 61.0103 3.2387 0.0802 374.0567 3.9731 142.2592
100 6594.3023 271.7075 1.5554 2.958 123.6176 15.4219 61.1504 2.8064 0.0802 373.6879 3.9733 124.9963
100 6599.363 271.7075 1.5061 2.106 124.5326 34.5059 60.7304 1.9417 0.0802 373.3003 3.9744 132.6874
100 6594.3023 271.7075 1.6622 2.1492 124.5326 12.1456 59.9099 2.374 0.0802 374.1559 3.9753 118.8802
100 6599.363 271.7075 1.5554 2.958 122.8556 30.1749 61.1504 2.8064 0.0802 374.2245 3.9753 135.9325
100 6599.363 271.7075 1.5558 2.4022 125 16.2075 60.6728 2.374 0.0802 373.0643 3.9753 122.3076
100 6594.3023 271.7075 1.6879 3.0518 123.6599 19.0348 60.8003 2.8064 0.0802 377.0701 3.9757 128.6042
100 6599.363 271.7075 1.6298 2.8089 122.904 32.9028 61.0551 2.8064 0.0802 373.848 3.9767 137.7822
100 6599.363 271.7075 1.6298 2.958 123.374 31.3109 60.5197 2.8064 0.0802 373.3762 3.9767 136.1953
100 6599.363 271.7075 1.6879 2.9973 123.9122 19.0348 60.8003 2.8064 0.0802 373.27 3.9777 127.4023
100 6589.2416 271.7075 1.9295 3.2703 124.6942 19.2583 61.6308 2.8064 0.0802 373.3365 3.9782 128.504
100 6594.3023 271.7075 1.927 2.8689 124.3001 13.7515 60.7982 3.2387 0.0802 373.5766 3.9802 126.933
The obtained set of nondominated solutions was
reduced by the clustering procedure applied in the ob-
jective space. Table 2 presents the most important
variables and the objective function values for a rep-
resentative of each cluster. Additionally, the values
of the total cost (TC) and the quality index (QI) were
calculated for these solutions. From the table, it can
be seen that the values of the aeration tank volume,
the sedimentation area as well as the nitrate and ni-
trite nitrogen are constant for all the presented solu-
tions. The values of the chemical oxygen demand are
slightly reduced compared with that obtained using
the multiobjective approach. On the other hand, the
values of the total nitrogen and the total suspended
solids are higher than in the previous experiments.
However, they are still below the law limits. Rela-
tively small variations can be observed regarding the
other variables, namely, the biochemical oxygen de-
mand, the total nitrogen of Kjeldahl and the effluent
flow.
Furthermore, the values of the total cost and the
quality index for all obtained nondominated solutions
were calculated. This way, a more general approach,
which only consists in minimizing the influential vari-
ables, is available to the particular case of the de-
sign of a WWTP facility. As a result, only four non-
dominated solutions were obtained in the space de-
fined by TC and QI. These solutions along with all
nondominated solutions obtained using multiobjec-
tive approach are shown in Figure 2. It is interesting
to note that the range of the trade-off curve obtained
in the previous experiments was extended. The so-
lution with the smallest cost function value was ob-
Figure 2: Trade-off curves obtained using multiobjective
and many-objective approaches.
tained using the many-objective approach. This can
be explained by the fact that in a high dimensional ob-
jective space the number of nondominated solutions
is usually larger than in smaller dimensional spaces.
This effect results in the propagation of the dissimi-
larities between solutions in the decision space. Typ-
ically, this is an undesirable feature that adversely af-
fects the performance of evolutionary multiobjective
optimization algorithms. However, the advantageous
side effect is that different regions of the search space
can be explored, which happens to be the case in the
herein described experiments. Thus, the obtained re-
sults show that the many-objective approach can be
useful not only during a draft project when the exact
data about design of a particular WWTP is not avail-
able, but also for finding optimal values in the later
Wastewater Treatment Plant Design: Optimizing Multiple Objectives
333

stages of the decision-making process. Defining and
simultaneously optimizing different combinations of
objectives can enrich the final set of the obtained al-
ternatives, which are eventually presented to the deci-
sion maker.
6 CONCLUSIONS
This study addressed the optimization of a WWTP
whose model parameters were estimated using real
Portuguese data. Two different approaches that can
be extended to any WWTP unit operation modelling
were considered. In the first approach, the WWTP de-
sign is addressed through a biobjective optimization
problem that consists of minimizing the total cost and
the quality index functions. The second approach is
more suitable for a draft project, when the exact loca-
tion and time where the WWTP is to be built is still
unknown. This approach involves the simultaneous
minimization of the influential variables, resulting in
a ten-objective optimization problem.
The results obtained in this study clearly show that
the WWTP design can be effectively approached by
simultaneously optimizing multiple objectives natu-
rally associated with the problem. The achieved opti-
mal solutions are meaningful in physical terms and
are economically attractive. Investment and opera-
tion costs are highly influenced by the optimized vari-
ables, stressing the importance of optimization. Both
approaches to WWTP design provide a set of non-
dominated solutions that can be used to gain valuable
insights about the problem and possible decision mak-
ing alternatives. This information can help to elabo-
rate a first version of the project and refine important
design choices when the specific location and moment
in time are defined.
ACKNOWLEDGEMENTS
This work has been supported by the Portuguese
Foundation for Science and Technology (FCT) in the
scope of the project UID/CEC/00319/2013 (ALGO-
RITMI R&D Center).
REFERENCES
Alex, J., Benedetti, L., Copp, J., Gernaey, K. V., Jepps-
son, U., Nopens, I., Pons, M. N., Rosen, C., Steyer,
J. P., and Vanrolleghem, P. (2008). Benchmark sim-
ulation model no. 1 (BSM1). Technical report, IWA
Taskgroup on Benchmarking of Control Strategies for
WWTPs.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
NSGA-II. IEEE Trans. Evol. Comput., 6(2):182–197.
Denysiuk, R., Costa, L., and Esp
´
ırito Santo, I. (2013).
Many-objective optimization using differential evolu-
tion with variable-wise mutation restriction. In Proc.
Genet. Evol. Comput. Conf., pages 591–598.
Denysiuk, R., Costa, L., and Esp
´
ırito Santo, I. (2014).
Clustering-based selection for evolutionary many-
objective optimization. In Bartz-Beielstein, T.,
Branke, J., Filipi
ˇ
c, B., and Smith, J., editors, PPSN
XIII, volume 8672 of LNCS, pages 538–547.
Denysiuk, R. and Gaspar-Cunha, A. (2017a). Multiob-
jective evolutionary algorithm based on vector angle
neighborhood. Swarm Evol. Comput., 37:45–57.
Denysiuk, R. and Gaspar-Cunha, A. (2017b). Weighted
stress function method for multiobjective evolutionary
algorithm based on decomposition. In Trautmann, H.,
Rudolph, G., Klamroth, K., Sch
¨
utze, O., Wiecek, M.,
Jin, Y., and Grimme, C., editors, EMO, volume 10173
of LNCS, pages 176–190.
Esp
´
ırito Santo, I. A. C. P., Costa, L., Denysiuk, R., and Fer-
nandes, E. M. G. P. (2010). Hybrid genetic pattern
search augmented Lagrangian algorithm: Application
to WWTP optimization. In Proc. Conf. on Applied
Oper. Res., pages 45–56.
Esp
´
ırito Santo, I. A. C. P., Fernandes, E. M. G. P., Ara
´
ujo,
M. M., and Ferreira, E. C. (2006). On the secondary
settler models robustness by simulation. WSEAS
Transactions on Information Science and Applica-
tions, 3:2323–2330.
Henze, M., Jr, C. P. L. G., Gujer, W., Marais, G. V. R.,
and Matsuo, T. (1986). Activated sludge model no. 1.
Technical report, IAWPRC Task Group on Mathemat-
ical Modelling for design and operation of biological
wastewater treatment.
Miettinen, K. (1999). Nonlinear multiobjective optimiza-
tion, volume 12 of International Series in Operations
Research and Management Science. Kluwer Aca-
demic Publishers.
Tyteca, D. (1976). Cost functions for wastewater con-
veyance systems. J. Water Pollut. Control Fed.,
48(9):2120–2130.
Zeng, G.-M., Zhang, S.-F., Qin, X.-S., Huang, G.-H., and
Li, J.-B. (2003). Application of numerical simulation
on optimum design of two-dimensional sedimentation
tanks in the wastewater treatment plant. J. Environ.
Sci., 15(3):346–350.
Zhang, Q. and Li, H. (2007). MOEA/D: A multiobjective
evolutionary algorithm based on decomposition. IEEE
Trans. Evol. Comput., 11(6):712–731.
Zitzler, E. and K
¨
unzli, S. (2004). Indicator-based selection
in multiobjective search. In Yao, E. K., Burke, J. A.,
Lozano, J., Smith, J. J., Merelo-Guerv
´
os, J. A., Bul-
linaria, J. E., Rowe, P., Ti
ˇ
no, Kab
´
an, A., and Schwe-
fel, H.-P., editors, PPSN VIII, volume 3242 of LNCS,
pages 832–842.
ICORES 2018 - 7th International Conference on Operations Research and Enterprise Systems
334
