
Runtime Attestation for IAAS Clouds
Jesse Elwell
1
, Angelo Sapello
1
, Alexander Polylisher
1
, Giovanni Di Crescenzo
1
, Abhrajit Ghosh
1
,
Ayumu Kubota
2
and Takashi Matsunaka
2
1
Vencore Labs, Basking Ridge, N.J., U.S.A.
2
KDDI Research, Saitama, Japan
Keywords:
Security, Virtualization, Cloud Infrastructure, Infrastructure-as-a-Service (IAAS).
Abstract:
We present the RIC (Runtime Attestation for Iaas Clouds) system which uses timing-based attestation to
verify the integrity of a running Xen Hypervisor as well as the guest virtual machines running on top of it. As
part of the RIC system we present a novel attestation technique which includes not only the guest operating
system’s static code and read-only data sections but also the guest OS’ dynamically loadable kernel modules.
These attestations are conducted periodically at run-time to provide a stronger guarantee of correctness than
that offered by load-time verification techniques. A system such as RIC can be used in cloud computing
scenarios to verify the environment in which the cloud services ultimately run. Furthermore we offer a method
to decrease the performance impact that this process has on the virtual machines that run the cloud services
since these services often have very strict performance and availability requirements. This scheme effectively
extends the root of trust on the cloud machines from the Xen hypervisor upward to include the guest OS that
runs within each virtual machine. This work represents an important step towards secure cloud computing
platforms which can help cloud providers offer new services that require higher levels of security than are
possible in cloud data centers today.
1 INTRODUCTION
In recent years computer systems have seen a sub-
stantial increase in the number of attacks performed
against them. One reason for this increase is that the
ubiquitous use of these systems for activities such as
banking and e-commerce, handling business and/or
military secrets, processing medical records, etc. of-
fers an environment where an attacker who manages
to successfully compromise the security of these sys-
tems can find it quite lucrative. According to (Syman-
tec, 2015) there was a 23% increase in the number of
breaches in 2014 when compared to 2013.
Recently there has been a growing interest in a
technique known as attestation to help protect sys-
tems against modification by an attacker. Attestation
is a process in which software that runs on a system
is measured (verified) to provide assurance of its in-
tegrity to other entities. In the most common case
the software that is critical to the secure operation of
a given system, for example the operating system, is
measured and it’s integrity is attested to another sys-
tem.
While the communication portion of different
attestation systems are similar, there are different
types of verification. Among the most popular are
hardware-based verification which is typically sup-
ported by the Trusted Platform Module (TPM) (tpm,
2007) and timing-based verification which is imple-
mented in software (Seshadri et al., 2005). Hardware-
based verification leverages the fact that a dedicated
hardware agent exists to perform measurements (e.g.
the TPM) that attackers cannot tamper with to influ-
ence the measurement process. Timing-based veri-
fication, as its name suggests, relies on the amount
of time taken to perform a measurement to detect at-
tacks that attempt to change the measurement pro-
cess. In this paper we are primarily concerned with
timing-based verification although some of the ideas
presented here may also be applicable to hardware-
based verification. The relative merits of the two ap-
proaches are discussed in (Seshadri et al., 2005) and
(Ghosh et al., 2014).
Verification can be performed at different times to
handle different types of attacks. For example the
hardware-based verification supported by the TPM
performs verification once at load-time and is capable
of detecting modifications made to the binary either
Elwell, J., Sapello, A., Poylisher, A., Di Crescenzo, G., Ghosh, A., Kubota, A. and Matsunaka, T.
Runtime Attestation for IAAS Clouds.
DOI: 10.5220/0006804002330247
In Proceedings of the 8th International Conference on Cloud Computing and Services Science (CLOSER 2018), pages 233-247
ISBN: 978-989-758-295-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
233

before load time (e.g. on disk) or during the load-
ing process. When compared to load-time verifica-
tion, run-time verification offers additional protection
against attacks that modify software while it runs, for
example if an attacker adds a malicious kernel mod-
ule to a running OS. Run-time verification however
requires some extra care to handle some of the dif-
ferences that can arise even when running the exact
same binary (kernel) on two different machines. For
example dynamic (run-time) linking can place load-
able kernel modules at different addresses, leading to
differing jump/branch targets and references to exter-
nal variables. The RIC system solves this problem
allowing the system to perform periodic run-time ver-
ification of the Xen hypervisor and the guest operat-
ing system’s kernel and kernel modules in a manner
that accounts for these address changes.
Attestation in any form can add a non-trivial
amount of overhead to a running system. For load-
time attestation this overhead comes from the fact
that measurement must take place before the software
can be run. Run-time attestation on the other hand
can require the software being measured to be paused
prior to and during measurement. For long running
programs the overhead of performing a single load-
time attestation is negligible, however run-time veri-
fication is more costly even for such programs since
they are measured periodically throughout their life-
time. The principal component of this overhead usu-
ally arises from the need to measure possibly large
areas of memory.
Existing work has presented the basic primitives
necessary to perform timing-based verification (Se-
shadri et al., 2005) and to apply timing-based veri-
fication to a running Xen hypervisor’s kernel for the
purpose of securing virtual machines (VMs) running
cloud services and operating above Xen (Ghosh et al.,
2014). In this paper we assume the XSWAT system
proposed in (Ghosh et al., 2014) as our baseline sys-
tem and present techniques to allow such systems to
measure more of the critical software involved in sup-
porting cloud services including the guest VM kernels
and their corresponding modules. An overview of the
RIC system is depicted in Figure 1. This effectively
extends the system’s root of trust to include the guest
operating system’s kernel and modules. Due to the
increased overhead from measuring the guest VM’s
kernel and modules in addition to the Xen hypervisor
during each attestation we also present a technique for
parallelizing the hashing component of attestation to
minimize the performance impact that this technique
has on the software that runs on the system.
Owing to a lack of Ethernet support in Xen,
XSWAT was devised to attest over a serial link. The
use of serial communication links for attestation on a
large scale is expected to be infeasible owing to the
additional costs involved. To investigate the feasabil-
ity of performing attestation over available Ethernet
infrastructure, a specialized PCI Ethernet card driver
was developed for RIC and its performance studied.
The rest of the paper is organized as follows: Sec-
tion 2 introduces the threat model and assumptions
used throughout this work, Section 3 contains details
about profiling the operating systems of guest VMs
in preparation for run-time attestation which is de-
scribed in Section 4, Section 5 explains our work in
speeding up hashing using parallelism, Section 6 de-
scribes the Ethernet driver developed for RIC, Sec-
tion 7 presents the experimental results collected from
the RIC system, Section 8 discusses related work and
Section 9 offers concluding remarks. Finally, a formal
proof of the security of the parallel hashing scheme
presented in Section 5 is offered in Appendix 1.
2 THREAT MODEL &
ASSUMPTIONS
The threat model used in this work is similar to that
of that of the XSWAT system with a notable excep-
tion. While the XSWAT system assumes that an at-
tacker has network access to and can compromise
guest OSes (including the privileged Domain 0), the
system discussed in this work is designed to detect
these guest OS compromises. As such we assume
only that the attacker has network access to the cloud
machine. RIC is designed to detect attacks that com-
promise a guest VM’s OS. This in turn helps to protect
the hypervisor by detecting attacks such as VM es-
cape (Wojtczuk, 2008) that rely on modifying a guest
VM’s OS to launch an attack against the hypervisor.
Effectively, the RIC system limits an attacker’s abil-
ity to place attack code in any software layer other
than the guest VM’s user-space.A malicious guest OS
can still be used to attack the hypervisor, however to
avoid detection the attacker cannot rely on modifying
the guest VM’s OS kernel to do so. For example, the
attacker could utilize a Return Oriented Programming
(ROP) (Shacham, 2007) attack against the guest OS
to execute code with OS privilege to launch an attack
against the hypervisor. Attacks such as ROP attacks
launched against the guest VMs or the hypervisor are
not covered in our threat model, detection and/or mit-
igation of such attacks is left for future work.
The proposed system also defends against multi-
processor attacks albeit in a different way than the
XSWAT system. Rather than halting all but the boot-
strap processor during an attestation request, the pre-
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
234
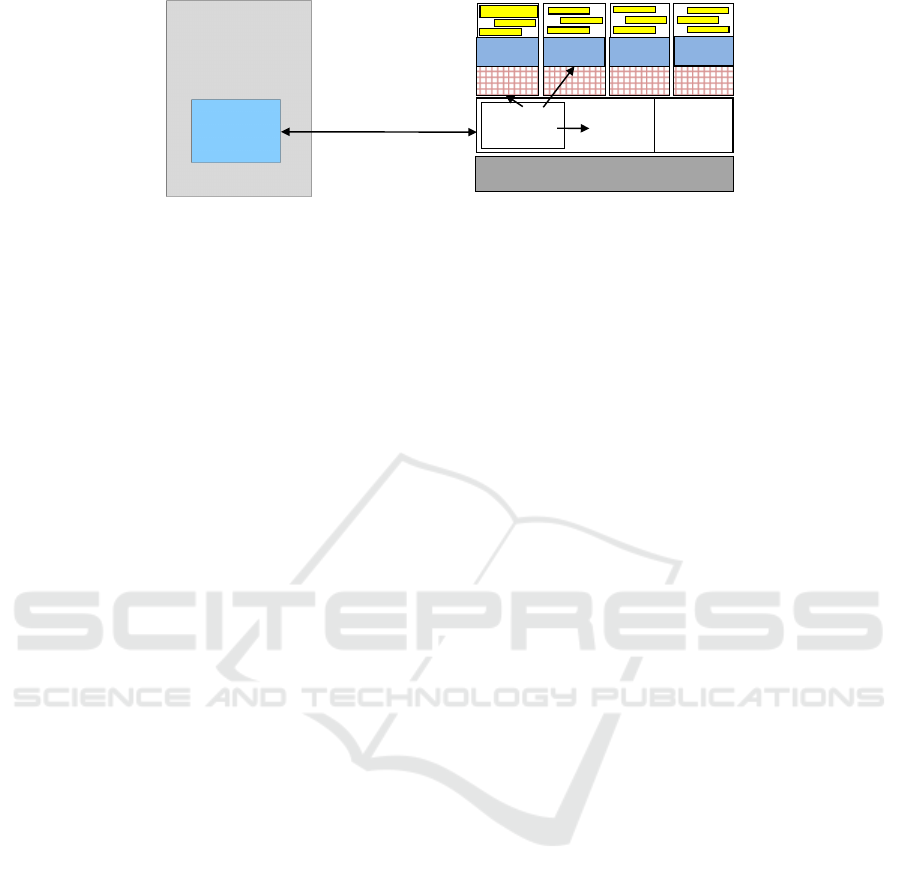
Verifier
Remote
Attestation
Protocol
Verifier Machine
Hardware
Attestation
System
Hypervisor
Code
Hypervisor
Guest OS
Cloud Service
VM
Cloud Machine
Figure 1: RIC Attestation System Overview.
viously unused processors are now utilized to speed
up the hash computation. This means that those pro-
cessors continue to be unavailable for use by an at-
tacker which is guaranteed and verified as part of the
attestation protocol described in Section 4.
As in (Seshadri et al., 2005; Ghosh et al., 2014)
we assume that the attacker does not have physical
access to the cloud machine and thus cannot tamper
with the hardware for example by replacing the CPU
with a faster one. We believe that this is a reason-
able assumption to make since cloud providers pre-
sumably have physical security measures in place in
the interest of protecting their reputation as a secure
cloud provider.
The process of profiling VMs, described in Sec-
tion 3, presents a race condition in that an attesta-
tion request that completes successfully attests that
the VM kernel’s code and read-only data have not
been modified since it was profiled. However if an
attacker is able to modify the VM’s kernel code or
read-only data before the VM is profiled then subse-
quent verification requests will succeed even though
the attack code may already be in place. Therefore
we assume that the VMs are profiled before the at-
tacker gains access to them, for example by profiling
VMs before the cloud machine is connected to a pub-
lic network.
Attacks that only require access to the user-level
application that offers a cloud service are not covered
in our threat model. An example of such an attack
would be an SQL injection attack launched against a
website that uses an SQL database as a backend to
store data.
3 PROFILING A VIRTUAL
MACHINE’S OPERATING
SYSTEM
In this section we provide a detailed explanation of
the improvements made to the XSWAT system that
allow a guest VM’s OS kernel and modules to be mea-
sured in addition to the Xen hypervisor’s kernel.
In order to measure (i.e. hash) a running OS, a
strategy is needed to hash the various parts of that
OS. Similarly to the measurement of the hypervisor,
the sections of the OS that can be reliably measured
are the code and read-only data sections. Measuring
the code and read-only sections of the kernel proper
is complicated by the existence of structures such
as SMP locks and jump tables. Additionally, kernel
modules which are dynamically inserted into a kernel
at run-time, run with the same privilege as the ker-
nel proper. This means that if the modules are left
un-measured, an attacker could use a malicious ker-
nel module to perform an attack. Similar to the kernel
proper, each module has its own code and read-only
data sections, which means that we can measure those
sections to attest the correctness of the module.
When dealing with the modules an additional
complication arises and that is that kernel modules
must be relocatable so they can be flexibly inserted
into the kernel’s address space alongside other ker-
nel modules. Due to this fact, kernel modules must
be compiled in a position independent manner. This
means that branch/jump targets and references to ex-
ternal symbols must be left in a state that allows them
to be adjusted when they are loaded (insertion time
for kernel modules). The challenge here is that ideally
we would like to measure the module’s code and read-
only data sections, including branch/jump targets and
external references, in such a way that the measure-
ment is reproducible on the verifier machine.
To solve this problem we design and make use of
a VM profiler that generates a signature of a given
VM’s kernel and modules that is used during run-time
to attest the correctness of the VM’s OS. The follow-
ing subsections explain in detail how the VM profiler
works.
Runtime Attestation for IAAS Clouds
235
3.1 Obtaining VM Data
The profiler can work in an online mode or an of-
fline mode. In either case it needs the state of the
VM while it is running with all modules it might en-
counter during normal operation loaded. In online
mode the profiler uses the name of the VM to request
pages of memory from the VM via the Xen hyper-
visor. In offline mode the profiler uses a core-dump
of the VM obtained by the user to obtain information
about the VM. This is the safer mode of operation
since it avoids any potential race conditions. Since it
cannot be core-dumped, Domain-0 can only be pro-
filed in online mode.
3.2 Profiling the Static Sections of the
Kernel
The profiler first needs to profile the static portions
of the VMs kernel. That is the code and read-only
data of the kernel. Since the Linux kernel can load
itself to different addresses and the kernel can vary in
location and size of the code and read-only data sec-
tions, the profiler needs information about the layout
of the kernel. This is obtained via the System.map file
produced during the compilation of the kernel. Now
knowing the start and end of the code and read-only
data sections of the kernel, the profiler can request
the appropriate pages of memory from the running
VM (or core file), make adjustments for SMP locks
and the jump table (see Section 3.3.3) and produce a
SHA-1 hash of these sections. As an optimization for
signature matching, a SHA-1 hash is also produced
of the first page of the read-only data section of the
kernel to act as a thumb print to select potential sig-
nature candidates during attestation. This first page
happens to contain version numbers and build infor-
mation about the kernel making it very likely to be a
distinguishing characteristic of the VM. Our choice of
the SHA-1 hashing algorithm is explained further in
Section 5.
3.3 Profiling the Modules
Once the static portions of the kernel have been pro-
filed, the profiler moves on to generating a profile of
the kernel modules. In order to access modules and
module information the profiler needs additional in-
formation about the kernel layout. In particular it
needs to obtain the head pointer of the module list
whose location is specified in the the System.map
file. In addition to this pointer, the layout of the
module structure is needed. Unfortunately this is not
maintained in any distributed file and must be ob-
tained from the kernel source. For most kernels a
generic source can be downloaded from kernel.org
since the module structure rarely changes. Once
found the source will need to be configured in the
same way as the loaded kernel. The profiler will auto-
matically perform this step if the kernel configuration
file is provided. Since parsing kernel source can be
quite complicated and the kernel build system is al-
ready designed to do this, the profiler compiles a tiny,
simple program called dump locs against the kernel
source to get the required information.
Once the the module list and module information
is obtained a further complication exists. Namely,
each time a VM boots it may load modules at differ-
ent locations and in a different order. Given this need,
modules must use relocatable code. In the module
file is a relocation table that tells the kernel module
loader what parts of the static kernel, other modules
and even the module itself, to which the module will
need references. Further, these references may be ab-
solute or relative and 32-bits or 64-bits. Absolute ref-
erences to itself or other modules and relative refer-
ences to the kernel or other modules may change on
each boot. Therefore, the profiler needs information
about these relocations to properly profile the mod-
ules. This means the profiler must have access to the
module files from the VM’s drive.
3.3.1 Understanding Relocatable Code and the
Relocation Table
The relocation table consists of entries of the follow-
ing format:
Section Location Type Symbol Reference
The section field is the section of the module
where the relocation needs to go (i.e. ”.text”,
”.rodata”, etc.). The location field is the offset
within the section where the relocation should be
placed. The type field is the type of relocation to per-
form and is one of: 32-bit signed absolute reference,
64-bit absolute reference, 32-bit relative reference or
64-bit relative reference. Finally the symbol reference
field is a description of the symbol to which the relo-
cation should reference specified as a symbol name
and offset (such as printk-0x00000004).
Each symbol exported by the kernel and other
modules is maintained in a list in the kernel and has a
unique name. Both exported and local symbols in the
module itself are listed in the module file. The Linux
module loader uses these lists to calculate the correct
reference type to the requested symbol and place the
reference in the module at the desired location.
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
236

Table 1: Relocation Offsets
Kernel Self Other Module
Relative +self.base addr no adjustment +self.base addr - mod.base addr
Absolute no adjustment -self.base addr -mod.base addr
3.3.2 Dealing with Relocations
The issue with relocations is that with each reboot of
the VM a simple hash of the module’s code and read-
only data sections would change. To overcome this
there are a couple of options. One would be to sim-
ply zero out all the relocatable references. Although
fairly straight forward, this presents a potential secu-
rity hole as these relocations are often calls to code in
other modules and the static kernel. By zeroing out
the relocations, an attacker could modify a module to
reference its own code and the VM attestation code
would not be able to detect this change. Therefore,
we use a more complex solution of adjusting all re-
locations in the module in such a way that it would
appear that the module and any module it references
were loaded at address 0. In this way the informa-
tion about which module was being referenced and
the offset of the reference is preserved.
Rather than attempting to look up relocations we
take advantage of the fact that the module loader has
already done this for us. We know the base address
of each module (from the module list parsing) and we
know where the kernel starts. To determine what a re-
location maps to we simply find the relocation in the
VMs loaded module code, adjust for the relative posi-
tion in the case of relative relocations, and determine
whose memory space the relocation points to. We
store which module (or kernel) this relocation points
to then use Table 1 to adjust it.
As you can see, some relocations require no ad-
justment. Therefore, as an optimization we delete
these relocations from our list so they need not be
considered at attestation time.
The information stored to the profile has the fol-
lowing format:
Location Size Type Reference Number
Location is the offset into the module’s memory at
which the relocation is performed. Size indicates how
many bytes the relocation spans (typically 4 for 32-bit
or 8 for 64-bit, but other values are possible as indi-
cated in the next section. Type indicates whether this
is absolute or relative (or a special case of zeroing out
as described in Section 3.3.3). Reference Number is a
number indicating which module the relocation points
to (possibly itself or a special value for the kernel).
It may seem that an attacker could exploit this
method by pointing the relocation to the same off-
Module A/B
Module A
Module B
Module B’
0x0000
0x0800
0x1000
0x1200
0x2000
0x2200
+0x0A00
+0x1A00
0x0000
0x0800
0x0200
-0x0600
0x1200
+0x0A00
Figure 2: Failed Exploitation of Module Relocation.
set in a different module (most likely its own) since
the base address of the referenced module is removed.
However, since the adjustment is made both at profil-
ing time and attestation time and at attestation time
the base address removed is based on the module ref-
erence number, pointing to a different module will
still give a different result and cause the attack to be
detected. Furthermore, the addition of an unprofiled
module will raise a flag in the attestation code and
cause attestation to fail. Therefore even though we
make it appear as though all modules were loaded at
address 0 to get a consistent hash, attestation is still
just as rigorous as it would be if we left the reloca-
tions alone.
As a more concrete example see Figure 2. In this
figure module A is loaded at address 0x0000 and has a
reference at offset 0x0800 to code at offset 0x0200 in
module B which is loaded at address 0x1000. An at-
tacker has loaded module B’ to address 0x2000 which
has attack code located at offset 0x0200. The attacker
hopes that by removing the base address his new re-
location will look identical to the valid one. However,
since the attestation code removes the base address of
module B, while the valid result should be -0x0600,
the attacked relocation gives a result of +0x0A00 and
the hash of module A will be incorrect.
3.3.3 Other Issues with Relocations and
Solutions
One final set of issues comes with adjusting reloca-
tions on loaded modules. One is that the referenced
code or data may have been unloaded already. An-
other is that the relocation may have been overwritten
by code patching that occurred during module loading
and further relocation may have moved with a patch.
Relative Text Relocations: Relative relocations
Runtime Attestation for IAAS Clouds
237

are always relative to the address of the relocation.
However, in the x86 architecture relative jumps and
calls are relative to the next program counter address.
For this reason almost all relative relocations in the
text section of a module are of the form symbol-4.
An edge case exists when the relocation is to the first
possible address in the target in which case the pro-
filer would, without special consideration, incorrectly
identify which module is being pointed to and iden-
tify the previous memory space instead. To overcome
this we add 4 to all text relocations. This may seem to
create a different edge case, but in practice the orig-
inal problem is observed often, while the new edge
case does not appear to happen.
References to Unloaded Sections: Once a mod-
ule has finished loading and has been initialized, the
kernel unloads all .init.* sections. As a result any
relocations to this code or data will be broken and
cause the profiler to misidentify the relocation. Since
these relocations are not used after module initializa-
tion (this must be true or the module would be using a
broken pointer), we simply look at the symbol name
in the relocation table and delete (zero out) any relo-
cation to a symbol starting with .init.
Alternate Instructions: To allow flexibility of
the kernel and modules to be loaded on a number
of different x86 processors but at the same time al-
low that same code to take advantage of advanced
processor features, the Linux kernel uses a system
of alternative instruction patching. That is, the main
code section contains the most generic implementa-
tion that is guaranteed to work on all x86-64 proces-
sors, then in a separate section more processor spe-
cific code to replace that code with exists. These re-
placements along with a table specifying what proces-
sor features to look for to do the replacements allows
the kernel to patch a module at load-time to be as ef-
ficient as possible. This isn’t a problem for the static
kernel since the replacements are always the same for
the same hardware. However, for modules there may
have been relocations in the replaced code and in the
replacement code. Again, rather than try to identify
the processor features and do the patching ourselves,
we take advantage of the fact that the kernel has al-
ready done this. We take each piece of potential re-
placement code in the module file and adjust the ref-
erences for the possible end location of this replace-
ment. Then we compare the replacement code to the
code found in the loaded module’s text section. If it
matches, then the replacement must have been per-
formed and we should delete any relocations in the
original code range and remap any relocations from
the replacement code into this range.
Paravirtualized Instructions: Similar to the al-
ternative instruction patching more recent Linux ker-
nels contain native bare-metal hardware code in the
main text section and can patch that code with calls
to a hypervisor if paravirtualization is being utilized.
However, unlike the alternative instructions where the
replacement is packaged with the module. The par-
avitualized operation (PV-op) patches are packaged in
the kernel itself and the module only indicates which
PV-op should go where. Due to the complexity of this
system we check to see if the original code is present
and if not mark the code for zeroization at attestation
time.
SMP Locks: On multi-core processors the lock
opcode prefix causes a performance penalty even if
only a single core is currently running. Therefore,
as an optimization the Linux kernel and its modules
specify a table of where these lock prefixes exist in the
code. If the system is in single processor/core mode,
then these lock prefixes are replaced with no-op in-
structions. This is especially concerning to our envi-
ronment as VMs may be started with a variable num-
ber of VCPUs. To deal with this, we simply verify
that the bytes whose addresses are listed in the SMP
locks table are either a lock prefix (0xf0) or a no-op
instruction (0x90) and then zero out the byte.
Jump Table: Originally intented to optimize the
removal of debug code when the kernel is not in debug
mode, the kernel jump table specifies the locations of
conditional branch points where the condition vari-
able changes very infrequently. Rather than using a
conditional branch instruction in the code, the com-
piler writes an unconditional jump or no-op instruc-
tions based on the initial value of the condition vari-
able. The condition variable is changed using a func-
tion call which identifies the affected branch points
and rewrites the instruction(s). We deal with this in a
way similar to SMP locks. We first verify that the tar-
geted code is either a valid no-op sequence or a jump
to the correct location. Once verified it is zeroed out
to ensure a consistent hash result.
4 RUN-TIME ATTESTATION
In this section we provide details of how the VM pro-
files described in the previous section are incorpo-
rated into the run-time attestation protocol. The basic
idea of the attestation protocol is similar to that of the
Pioneer (Seshadri et al., 2005) and XSWAT (Ghosh
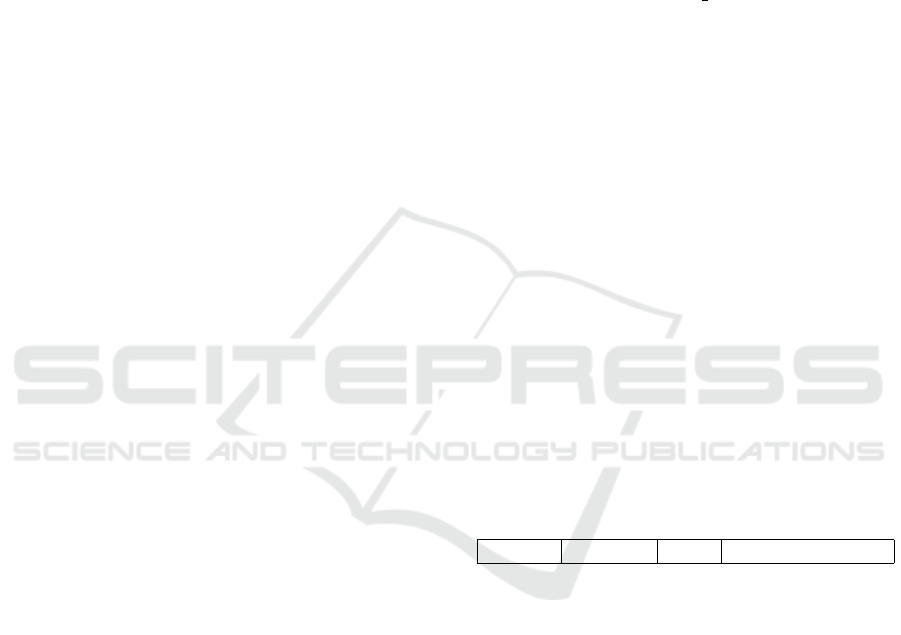
et al., 2014) systems. The attestation protocol is
shown in Figure 3 and it works as follows.
First the VM profiles are sent to both the verifier
and the cloud machine. On the verifier machine a pro-
gram is used to convert each individual VM’s profile
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
238
VM
Checksum code
Send function
Hash function
Verification function
Verifier
VM type
profiles
Verifier Machine
Checksum code
Send function
Hash function
Verification function
Cloud Machine
Hypervisor
Hypervisor code and
static data
VM
kernel
Kernel
module 1
Kernel
module k
Challenge
Checksum
Hypervisor
Hash
VM Hash
Hash Hypervisor
and Profiles
Hash VMs
minimal VM
type profiles
Self Checksum
Figure 3: RIC Attestation Protocol.
into a signature after which the signatures of all the
VMs (including Dom-0) that will run on the cloud
machine are stored in a file. On the cloud machine
each profile undergoes this conversion to a signature
as part of the process of loading it into the memory
space of the Xen hypervisor. In addition to the VM
profiles, in order for the verifier to compute a known
correct hash of the hypervisor the verifier requires the
xen-syms file that is generated during compilation of
Xen.
Attestations are initiated by the trusted verifier
machine shown on the left side of Figure 3 who sends
a challenge to the cloud machine which is to be at-
tested. This challenge consists of a random nonce to
be incorporated into the self-checksum performed by
the cloud machine which is described below. The ver-
ification program that is run on the verifier machine
is supplied with a maximum wait time and chooses a
uniform random value between one and this specified
maximum number of seconds to wait between attesta-
tion requests. This process assures than attacker can-
not predict when attestations will be performed thus
making it difficult to hide evidence of an attack be-
forehand.
The cloud machine begins by first disabling all
maskable interrupts as well as replacing the non-
maskable interrupt (NMI) handler with a handler that
contains only a return instruction. This is done to
ensure that an attacker has no means to hijack one
of the cores during attestations and essentially leaves
the attestation code in complete control of the cloud
machine for the duration of the attestation. Next,
the cloud machine performs a self-checksum over
the verification function which contains the critical
code necessary to carry out the rest of the attestation.
In addition to the verificaiton function other critical
pieces are also included in the checksum, including
the newly replaced NMI handler. This ensures that if
an attacker attempts to place the attack code in a NMI
handler and later trigger an NMI, this change will be
detected by the resulting checksum mismatch. The
verification function includes the checksum code it-
self, the send function used to communicate with the
verifier, and the hash function that is used to measure
the rest of the software. Furthermore the challenge
that was sent to the cloud machine from the verifier is
also included in the checksum to eliminate the possi-
bility of a replay attacks. The self-checksum provides
a root of trust in software on the cloud machine which
is extended further upward through the software stack
by the rest of the attestation process. Once the check-
sum has been completed by the cloud machine the re-
sult is sent to the verifier using the send function. The
verifier having the challenge and a correct copy of the
verification function computes the same checksum to
compare against the result it receives from the cloud
machine.
The final portion of the attestation protocol is per-
forming the hashes that attest the correctness of the
hypervisor and guest OSes. Since the hashes do not
change for a specific Xen hypervisor binary and the
corresponding VMs that will run on top of it, the ver-
ifier’s verify program can compute all of the neces-
sary hashes once during initialization and store them
for later comparisons. The cloud machine on the other
hand must compute a set of fresh hashes during each
attestation. The first item to be hashed is the hypervi-
sor and includes its code section, read-only data sec-
tion and additionally the VM signatures which reside
in Xen’s address space. Once this hash is finished,
it is sent via the send function to the verifier. De-
pending on the performance budget allocated to attes-
tation and the number of running VMs either all of
the VMs or a randomly selected subset of them are to
Runtime Attestation for IAAS Clouds
239

be hashed next. For each selected VM, the guest’s OS
kernel code and read-only data sections are hashed.
Then for each module that is currently running inside
that guest VM, the relocation adjustment described in
the previous section is performed and then a hash is
computed over the module’s memory space. It should
be noted that these relocations and the resulting hash-
ing are performed on a fresh copy of the VM mod-
ule content to avoid having to undo all of the mod-
ifications once the hash is finished. Once the attes-
tation request has been completed the cloud machine
cleans up by restoring the normal NMI handler and
re-enabling maskable interrupts. Finally, the trusted
verifier can compare the checksum and hashes that it
received from the cloud machine to the copies that it
has computed locally to detect any mismatches and
thus report them to the cloud owners.
5 PARALLELIZING HASH
COMPUTATIONS
In this section we provide the details of our work in
speeding up the RIC attestation process by paralleliz-
ing the hash computations that are utilized. Due to
the fact that the guest OS is now hashed in addition to
the Xen hypervisor the amount of time spent hashing
during each attestation request represents the major-
ity of the time taken to complete each attestation. The
original XSWAT system doesn’t allow an attacker to
utilize extra processors by halting all but the bootstrap
processor (which performs all the computations se-
quentially) during requests so all but one of the pro-
cessors in a multi-core system are unused. Making
use of these otherwise idle processors comes with no
loss of security so long as the attacker is not allowed
to use those processors to hide evidence of an attack
during attestation, which is guaranteed by the attesta-
tion protocol as discussed in Section 4.
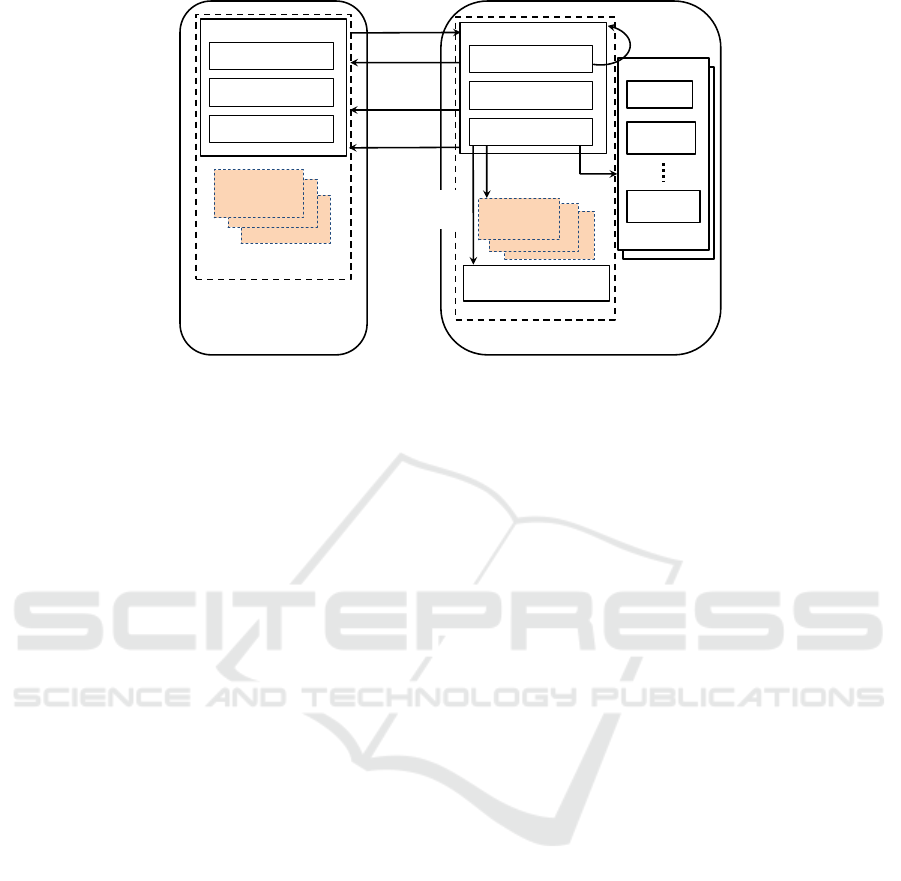
5.1 Chunk-based Hashing
We call the general idea of our hashing scheme chunk-
based hashing. Our prototype uses the SHA-1 hash-
ing algorithm, which is inherently a sequential hash-
ing algorithm due to its ”chained” nature. The output
of each hash block is used as an input to the hash of
the next block. This sequential process is depicted at
the top of Figure 4. In this work we chose the SHA-1
hashing algorithm due to export control restrictions.
However chunk-based hashing can be adapted to use
other hash functions such as SHA-2 or SHA-3 which
are considered to be more secure. The specific choice
of a hashing algorithm is not central to the ideas pre-
sented in this work and a cloud provider wishing to
implement this system should choose a hashing al-
gorithm whose strength (i.e. its collision-resistance
property) fits their needs.
Chunk-based hashing in contrast to the chained
serial hashing works as follows. Each block of the
input data is treated as a separate block of data and
hashed individually. Assuming that the input data
contains N blocks (64 bytes each for SHA-1) this pro-
duces N output hashes (20 bytes each). These out-
put hashes, which we refer to as intermediate hashes,
are then concatenated and treated as the input to the
next level of hashing. Similarly to the top level, the
intermediate hashes are divided into M blocks (with
M < N) and again each is hashed individually pro-
ducing M output hashes. This process continues until
a level consists of a single block of input data and thus
results in a single hash. An example of this process
that shows a single level of this hashing scheme is de-
picted at the bottom of Figure 4. This hashing scheme
readily allows parallelization of the hash computa-
tions since a separate hash is computed for each input
block, which does not depend on any other block(s).
Assuming the use of a cryptographically secure
hash function this construct is no less secure than
hashing sequentially. In this model the attacker only
has the ability to modify the initial input data and is
not able to directly manipulate the intermediate hash
results. Intuitively if the attacker wants to cause a col-
lision in the final hash, which we will call the N
th
level hash, they can cause a collision in any of the
N − 1 levels below the N
th
level hash. In theory this
presents more opportunity for the attacker to cause
a collision in the final hash, however as previously
mentioned the attacker can only modify the initial in-
put data. This means that the attacker needs to make
some modification to the initial input data that results
in either an immediate collision in the first level of
hashes or an output value that will cause a collision in
the next level(s) of hashes. Given a cryptographically
secure hashing algorithm which includes a collision
resistance property, finding even an immediate colli-
sion in the first level of hashing is difficult. Further-
more since the attacker only has indirect control over
the inputs to the rest of the levels of the hash causing
a collision in these levels is also quite difficult. For a
more rigorous proof of the security of this approach
see Appendix 1.
5.2 Coordinating Hashes
The chunk-based hashing design presented in the pre-
vious subsection is coordinated using a lock-less work
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
240
Hash Hash
Hash
state
state
state
state output
Message block 1 Message block 2 Message block N
……
Hash
Hash
Previous
Input block 1
Previous
Input block 2
……
……
Concatenate
Next
Input block 1
……
Hash
Hash
Previous
Input block N-1
Previous
Input block N
……
Concatenate
Next
Input block M
Figure 4: Sequential vs Parallel Hashing.
queue. The work queue is managed by a single mas-
ter thread and hashes are carried out by a number of
worker threads that watch the queue for items to hash,
hash them, and write the resulting hashes into a buffer.
The work queue consists of two arrays, one to hold
work queue items and one to hold the results of the in-
termediate hashes. Each work queue item represents
a single hash to be performed and includes all of the
necessary data required to perform the hash such as
the location of the input data, where to put the hash
output, the size of the input etc. The necessary ca-
pacity of the work queue can be computed during its
initialization based on the maximum amount of data
that it needs to be able to process. This means that the
arrays can be allocated once during initialization time
rather than at the beginning of each hash calculation.
It is necessary to keep track of the number of
workers currently working on each item to avoid use-
after-free errors that arise from freeing buffers that
hold input data while hashes of that data are being
computed. Our implementation uses the atomic in-
crement and decrement instructions offered by the
x86-64 architecture to update the worker count safely
across multiple processors.
After the master thread sets up each work queue
item they can be in one of the following three states:
The UNCLAIMED state which means that it is ready
to be picked up and handled by one or more work-
ers. When a worker picks up an item the worker
changes its state to CLAIMED (and increments the
worker count). Finally when a worker completes the
hash denoted by an item it transitions to the COMPLETE
state to signal that the corresponding result is ready.
To avoid all of the workers repeatedly picking up
the same queue item to hash, workers start their search
for an item to hash based on the processor ID of
the processor on which they execute. If the worker
checks all of the items and does not find one in the
UNCLAIMED state and it has been configured to do so
(at compile time) it begins its search again this time
searching for items in the CLAIMED state. This offers
some possible redundancy in the computation of each
item’s hash. There are number of reasons why redun-
dancy might provide an advantage. The first would be
that it offers fault tolerance. If for any reason a worker
is unable to complete the hash it will be completed by
another worker. This may also provide a performance
boost in the presence of heterogeneous cores, for ex-
ample ARM’s big.LITTLE technology (Greenhalgh,
2011) or Dynamic Voltage and Frequency Scaling
(DVFS) (Semeraro et al., 2002; Le Sueur and Heiser,
2010) where a slower core may pick up an item first
but a faster core that becomes available later may be
able to finish it faster. Due to the lock-less design of
the work queue, even though it is not explicitly al-
lowed, more than one worker can process the same
hash item due to race conditions in setting and read-
ing a queue item’s state. While this does happen it
is rather infrequent. It should be noted that the ab-
sence of locking does not have an effect on the cor-
rectness of the output and corresponding change of
state to COMPLETE when an item is finished since the
result being written and the state change are identical
for any workers who happen to write them simultane-
ously.
5.3 Improvements and Optimizations
The first improvement to the above design addresses
two issues and this improvement is where the name
chunk-based hashing comes from. The first issue is
the amount of extra data that needs to be hashed due
to this scheme. This corresponds directly to the num-
ber of intermediate hashes. For a 64MB file the in-
crease in the amount of data that needs to be hashed
is roughly 1.5X for a total of 100MB (64MB of input
Runtime Attestation for IAAS Clouds
241

0%
5%
10%
15%
20%
25%
30%
35%
40%
45%
50%
1 2 4 8 16 32 64 128 256 512 1024
Hashed Data Size Increase (%)
Chunk Size (blocks)
Figure 5: Data Size Increase vs Chunk Size.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
2.0
1 2 4 8 16 32 64 128 256 512 1024
Speedup
Chunk Size (blocks)
-1.4
-20.8
-193.9
-1965.4
Figure 6: Speedup vs Chunk Size.
data and 32MB of intermediate hashes). In addition
to the fact that more data needs to be hashed over-
all, each call to the SHA-1 hashing function comes
with various setup and tear down overheads. If this
setup and tear down cost is incurred for each individ-
ual block of input data and each block of intermediate
hashes the overall performance degrades quite signif-
icantly. Indeed if each queue item handles only a sin-
gle SHA-1 block a performance loss of about 2000X
is observed for a 64MB file when compared to the
standard sequential version.
Our solution to this problem is, rather than each
queue item handling a single 64 byte block, they in-
stead are each assigned a chunk consisting of multiple
blocks. Figures 5 and 6 show the reduction in added
data and speedup attained compared to the sequential
hashing respectively as the chunk size is increased.
The optimal number of blocks in each chunk is a func-
tion of the size of the input data and the number of
processors available. To this end the work queue dy-
namically determines the optimal chunk size at each
level given these two values using Equation 1. The
size of each chunk is then computed using this value
and the size of the input data.
chunks =
data size
2 × NUM CPUs
(1)
The second improvement arises from the observa-
tion that if the master thread only performs queue op-
erations, it spends a significant amount of time wait-
ing for the workers to finish their work before it can
insert more items into the queue or declare the hash
complete. Addressing this problem is relatively sim-
ple and consists of allowing the master thread to help
computing hashes between queue management oper-
ations.
The final optimization that we implemented is
similar in nature to an optimization commonly made
to the quick sort sorting algorithm. It is common in
quick sort implementations to use a different sorting
algorithm (such as insertion sort) when the partitions
become smaller than a certain size. In this case, when
the input data is sufficiently small, the regular se-
quential hashing technique out performs the parallel
version. We experimentally determined the point at
which the parallel version actually out performs the
regular implementation for the specific testing ma-
chine that we used to be 16KB of input data. This
information is used in two cases: 1.) if the initial data
passed to our algorithm is less than 16KB the work
queue isn’t used at all and the data is simply hashed
sequentially and 2.) when the intermediate hashes at
a given level are smaller than 16KB the master thread
signals to the workers that the hash is finished and
computes the final hash sequentially.
6 ETHERNET DRIVER
XSWAT was devised to perform attestation over a se-
rial link due to a lack of Ethernet support in Xen.
While use of serial communication links may be in-
feasible on a large scale, most cloud operator environ-
ments make use of Ethernet based management net-
works that could be leveraged for attestation. Towards
this end, a specialized PCI Ethernet driver was de-
veloped for the Xen hypervisor and incorporated into
RIC. The driver handles hardware interrupts from the
Ethernet card, and, on the upstream path, either iden-
tifies a frame as a RIC frame and handles it, or passes
the frame to the VM (usually Xen’s Domain 0) con-
taining the appropriate Ethernet drivers. No down-
stream interference from the VMs is expected since
all VMs are stopped when attestation is in progress.
Linux code for the Ethernet driver was adapted for
this purpose.
An incoming attestation request generates an in-
terrupt that is caught by the RIC driver which con-
firms that the source of the interrupt is in fact the Net-
work Interface Card (NIC). If it is further determined
that the interrupt signaled a receive (RX) event, Xen’s
Domain 0 VM is paused. The NIC registers are read
for the address of the packet in Domain 0 memory,
the packet is read from this address and is matched
against the byte signature for an attestation request.
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
242
In case there is no match, Domain 0 is unpaused oth-
erwise the attestation code is triggered.
Once the attestation request processing is com-
pleted at the cloud machine, RIC then initiates the
process of creating an outbound attestation response.
Attestation response data is inserted into an outbound
packet which needs to be inserted into DMA accessi-
ble memory. Since it is hard to allocate DMA mem-
ory from Xen, an existing packet in DMA memory is
saved along with the state of the Transmission (TX)
ring buffer and is then overwritten with the outbound
attestation response. Once the response packet has
been transmitted using DMA, the saved packet is re-
stored, the TX ring buffer is restored to its previous
state and Domain 0 is unpaused.
Both inbound attestation request processing and
outbound attestation response processing are de-
signed to have low overheads to reduce the possibility
of introducing any jitter to the checksum process. The
evaluation results presented in Section 7 show that
no significant jitter is introduced by the RIC Ethernet
driver.
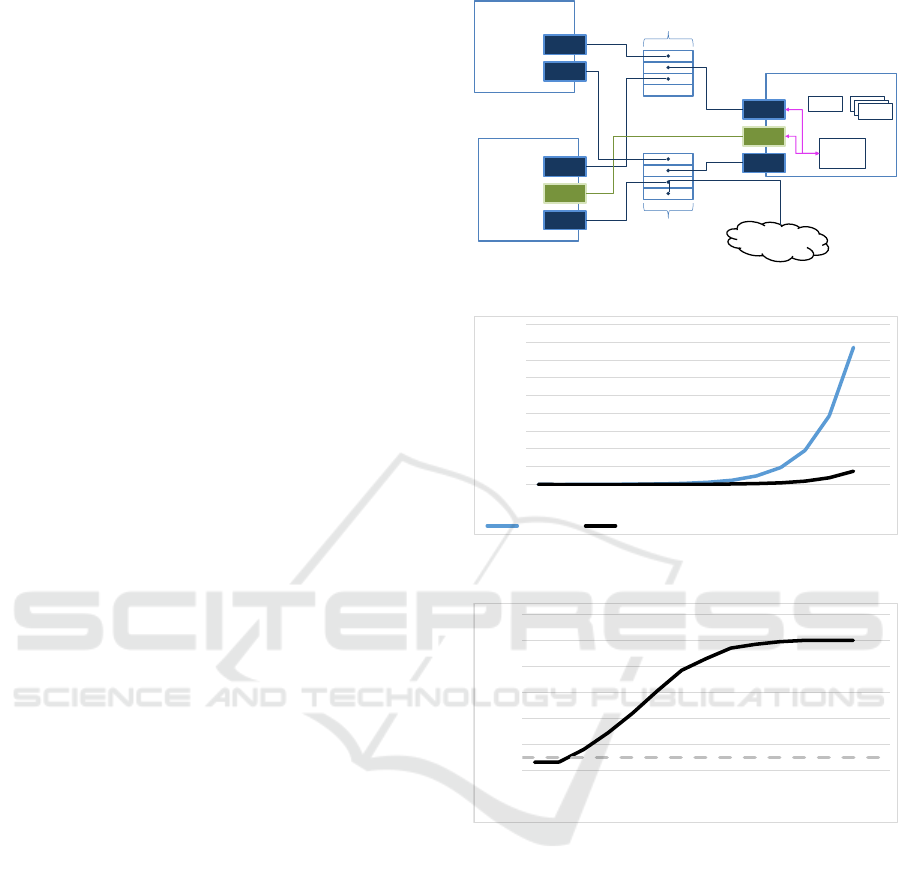
7 EXPERIMENTAL RESULTS
In this section we present the results of our experi-
ments in which we quantify the overhead introduced
by hashing VMs in addition to the Xen hypervisor and
the savings provided by utilizing the parallel hash-
ing technique to perform these hashes. The machines
used to capture our performance results are Dell R620
Xeon systems with 12 cores. Each core supports two
hyperthreads resulting in a total of 24 total hyper-
threads. The cloud machine and the verifier are con-
nected using ethernet via two switches, one for man-
agement tasks (including the attestation traffic) and
one for non-management tasks. The testbed setup is
shown in Figure 7. A serial link between the verifier
and the cloud machine was also used to run attestation
transactions for the purpose of comparison against at-
testation performance over Ethernet.
7.1 Parallel Hashing Results
To measure the performance gained by using the par-
allel hashing scheme without any of the additional
overheads from performing relocations etc. we ran a
user-space implementation of the parallel hashing al-
gorithm. The user-space implementation reads a file
filled with random data into memory, launches the
workers as pthreads (in the parallel case), and then
measures the time that it takes to hash the contents of
the file. For these tests we utilized all of the logical
snmp-client
em1
verifier
cloud machine
em2
Management Switch
Non-Management Switch
eth0
em1
br0
Dom0
RIC
com1
com1
eth1
DomU
DomU
DomU
Figure 7: RIC Testbed Setup.
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
4KB 8KB 16KB 32KB 64KB 128KB256KB512KB 1MB 2MB 4MB 8MB 16MB 32MB
Time (s)
Data Size
Sequential Parallel
Figure 8: Parallel vs Sequential: Timing for Various Data
Sizes.
1
0
2
4
6
8
10
12
4KB 8KB 16KB 32KB 64KB 128KB256KB512KB 1MB 2MB 4MB 8MB 16MB 32MB
Speedup
Data Size
Figure 9: Parallel vs Sequential: Speedup.
processors (hyperthreads) by using 23 worker threads
and the single master thread. These measurements do
not include the initialization of the work queue since
that action takes place only once during boot of the
Xen hypervisor and is reused from one hash to an-
other. The work queue however does need to be reset
after each hash and this overhead is included in the
timings presented. Figure 8 shows the amount of time
it takes the sequential and parallel hashing schemes
to complete a hash of the given size for increasing
data sizes. Figure 9 shows the speedup achieved by
the parallel version when compared to the sequen-
tial version. Each data point in both graphs repre-
sents the average of 100 tests. As can be seen from
the graphs more data being hashed results in a larger
speedup for the parallel version which levels off at
Runtime Attestation for IAAS Clouds
243

around the 10X speedup mark. This 10X speedup
mark is first attained with hashes around the 1-2MB
mark in size. We believe that the reason that the maxi-
mum speedup achieved is not closer to 24X (the num-
ber of hyperthreads) is that the hyperthreads are do-
ing identical work and thus there is a large amount of
contention for micro-architectural resources that are
shared amongst the hyperthreads that share the same
physical core. To confirm this we disabled hyper-
threading in the BIOS options and reran the experi-
ments. The results were very similar to the results
with hyperthreading enabled.
We also analyzed how using the parallel hash-
ing technique affects the RIC attestation process as
a whole. Particularly we were interested in whether
or not the conditions of the hashes in the attestation
protocol are suitable to achieve the 10X speedup that
we observed for the larger data sizes above.
As can be seen in Table 2 the checksum time was
not affected by the changes to the hashing algorithm
as expected. The hypervisor hash experiences an op-
timal speedup of about 10X. The VM hash does not
attain quite as much speedup as the hypervisor for a
few reasons. First, due to the way timings are taken,
the VM hash times also include the work of perform-
ing relocations as described in Section 3. In addition
to this the VM hashing is less ideal than the hyper-
visor hash in that the hypervisor hash consists of a
small number of larger hashes, while the VM contains
a larger number of hashes some of which are as small
as 4KB.
7.2 Ethernet Attestation Results
The performance of attestation over Ethernet was
compared against that of attestation over a serial com-
munication link in the context of a memory copy at-
tack. In a memory copy attack, an adversary main-
tains a copy of the unmodified Attestation System in
memory while using a malicious version of the code
to compute the self checksum. While servicing an at-
testation request, the malicious code uses the unmodi-
fied code to compute the correct self checksum for the
attestation system while hiding any evidence of cloud
software environment tampering. We refer the reader
to (Seshadri et al., 2005) for additional details.
The goal of this set of experiments was to de-
termine whether conducting attestation over Ether-
net would impact (a) the jitter of the self checksum
process and therefore (b) cause false negatives in the
face of a memory copy attack. In each of the exper-
iments described in this section, 100 attestation re-
quests were successfully completed to compute each
data point. The average interval between successive
attestation requests was set to 1 second. The num-
ber of checksum loop iterations was varied between
1,024,000 and 2,048,000 and exactly one randomly
selected VM was hashed during the attestation pro-
cess. The set of candidate VMs for hashing included
Domain 0 and benchmark applications were run on
each VM other than the Domain 0 VM. Each VM was
allocated 2GB RAM and assigned 1 CPU except for
Domain 0 which was assigned 2 CPUs. A total of 11
VMs were run on the cloud machine.
Table 3 shows checksum and attestation times
over Ethernet and Serial interfaces. In all cases,
the time taken over Serial is somewhat higher than
that over Ethernet due to the former being somewhat
slower than the latter. In all cases the checksum jitter
is comparable across the two interface types.
The table also shows the time taken to execute a
memory copy attack for a given number of checksum
loop iterations. There is a clear separation between
the checksum time and the time taken to conduct a
memory copy attack indicating that Ethernet based
attestation is fairly robust against these attacks. Self
checksum performance was also assessed in the pres-
ence of cross traffic representative of network man-
agement applications. This cross traffic was generated
by using an SNMP v2 client running on the snmp-
client machine shown in Figure 7 sending traffic to
an SNMP server running in Domain 0. Even with this
cross traffic, self checksum times remained stable pro-
viding further evidence of the robustness of Ethernet
based attestation as supported by RIC.
8 RELATED WORK
The RIC system is similar to the Checkmate (Ko-
vah et al., 2012), Pioneer (Seshadri et al., 2005),
MT-SRoT (Yan et al., 2011), and HyperSentry (Azab
et al., 2010) systems and represents a direct exten-
sion of the XSWAT (Ghosh et al., 2014) system. RIC,
while similar in spirit to these works, offers important
improvements to both the security and performance
of these systems. While each of these works uses
timing-based attestation techniques to create a root of
trust in software, this is the first of these works to ex-
tend that root of trust beyond the most privileged soft-
ware layer upwards towards the user-space applica-
tions. This has important implications that are of par-
ticular interest to cloud providers. Using this technol-
ogy a cloud provider can be assured that none of the
hypervisors or operating systems on which their cloud
services ultimately run have been compromised.
The hash parallelization scheme presented in
this paper is somewhat similar in nature to
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
244
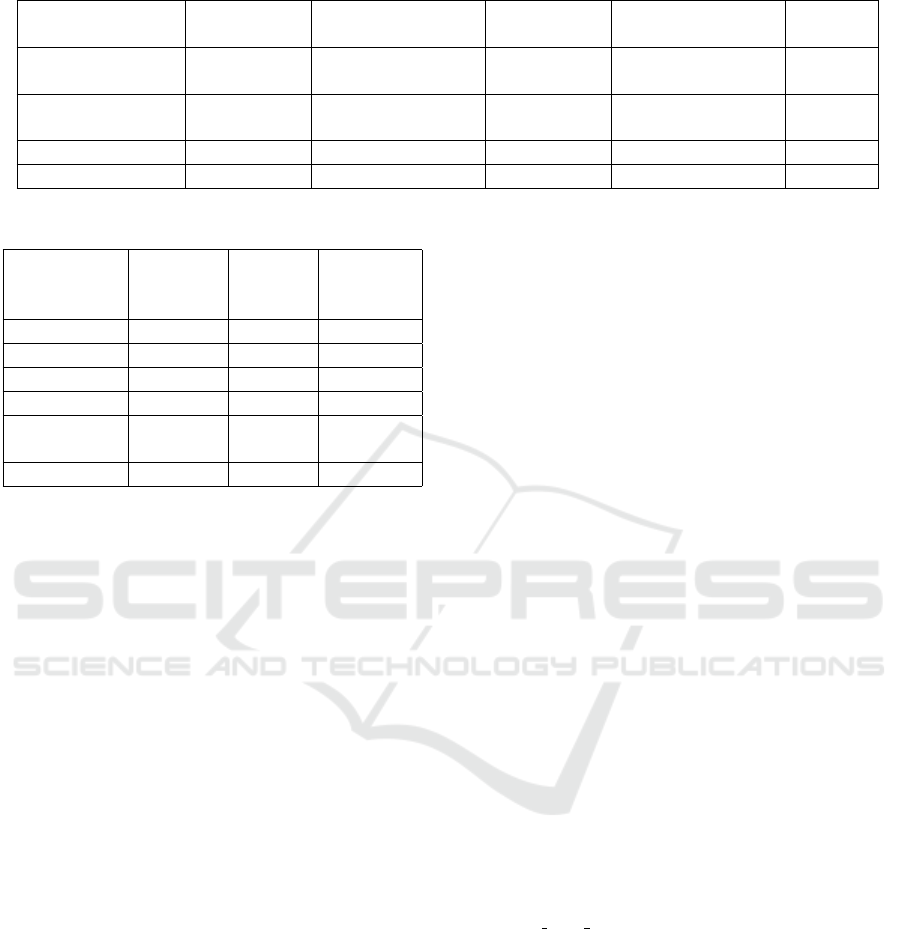
Table 2: XSWAT Results.
Activity
Sequential
Time (ms)
Portion of Request
Parallel
Time (ms)
Portion of Request Speedup
1024K Checksum
Iterations
13.41
30.81%
13.16
72.55% 1.0
Xen Hyervisor
Hash
4.32
9.92%
0.44
2.43% 9.8
VM Hash 25.80
59.27%
4.54
25.03% 5.7
Total 43.53 18.14
2.4
Table 3: Ethernet Self Checksum Results.
Self
Checksum
Type
Iterations
Mean
Time
(ms)
Std.
Deviation
Ethernet
1024K
13.56 0.08
2048K
25.56 0.09
Serial
1024K
13.85 0.08
2048K
25.84 0.09
Memory
Copy Attack
1024K
15.03 0.2
2048K
29.03 0.23
Merkle trees (Merkle, 1982), hash lists, and hash
chains (Lamport, 1981). The general principle behind
all of these constructs is to, perhaps repeatedly, apply
a cryptographic hash function first to the input data
and then to the output(s) that are created from this
step. Each construct aims to solve a different problem
whether it be increasing security or efficiency. Most
similar to our work is Merkle trees which were origi-
nally designed as a scheme to generate digital signa-
tures, however they can be applied to other problems.
In fact one of the most common uses of Merkle trees
today is to authenticate large data structures or files
in an efficient manner. For example Merkle trees are
used in peer-to-peer networks to allow only part of
a file (or group of files) which is being downloaded
from a given peer to be authenticated without the need
to have the entire file. Merkle trees help peer-to-peer
networks to be more efficient since if a single piece
of a file is corrupted, either due to transmission errors
or an attempted forgery, the Merkle tree allows the
client to determine the specific block of the file that
was corrupted and download only that block again
rather than re-downloading the entire file. Our so-
lution on the other hand is not concerned with iden-
tifying which piece of the measured data has been
corrupted and instead is focused on speeding up the
computation of the large hashes that the system must
perform. To accomplish this, our technique is de-
signed to run in a cloud environment which very often
runs on a multi-core platform and thus is designed to
explicitly take advantage of the availability of these
cores to compute hashes in a parallel fashion. Re-
cently, some other hashing constructions have been
proposed (Maurer and Tessaro, 2007; Haitner et al.,
2015) which are more similar in spirit to chunk-based
hashing and could potentially require less rounds of
parallel hashes resulting in a faster hash computation.
Due to the modular design of the RIC system, the
chunk-based hashing algorithm could be replaced by
one of these constructs to further improve its perfor-
mance and this possibility is being investigated.
9 CONCLUSION
In this paper we have described a method to profile
and attest the correctness of a guest VM’s operating
system. This includes attesting the integrity of jump
and branch targets as well as relocations in the dy-
namically lodabale kernel modules. In addition, to
combat the added overhead of hashing the VM’s guest
OS, we also propose a parallel hashing technique that
can increase the performance of hashing large areas
of memory by 10X on a 12-core machine.
REFERENCES
(2007). TPM Main Specification. Accessed online
at: http://www.trustedcomputinggroup.org/resources/
tpm main specification.
Azab, A. M., Ning, P., Wang, Z., Jiang, X., Zhang, X.,
and Skalsky, N. C. (2010). Hypersentry: enabling
stealthy in-context measurement of hypervisor in-
tegrity. In Proceedings of the 17th ACM conference on
Computer and communications security, pages 38–49.
ACM.
Damg
˚
ard, I. B. (1990). A design principle for hash func-
tions. In Advances in Cryptology–CRYPTO 1989 Pro-
ceedings, pages 416–427. Springer.
Ghosh, A., Sapello, A., Poylisher, A., Chiang, C. J., Kub-
ota, A., and Matsunaka, T. (2014). On the Feasibility
of Deploying Software Attestation in Cloud Environ-
ments. In Cloud Computing (CLOUD), 2014 IEEE 7th
International Conference on, pages 128–135. IEEE.
Runtime Attestation for IAAS Clouds
245

Greenhalgh, P. (2011). Big. little processing with arm
cortex-a15 & cortex-a7. ARM White paper, pages 1–8.
Haitner, I., Ishai, Y., Omri, E., and Shaltiel, R. (2015). Par-
allel hashing via list recoverability. In Advances in
Cryptology–CRYPTO 2015, pages 173–190. Springer.
Kovah, X., Kallenberg, C., Weathers, C., Herzog, A., Al-
bin, M., and Butterworth, J. (2012). New results
for timing-based attestation. In Security and Pri-
vacy (SP), 2012 IEEE Symposium on, pages 239–253.
IEEE.
Lamport, L. (1981). Password authentication with inse-
cure communication. Communications of the ACM,
24(11):770–772.
Le Sueur, E. and Heiser, G. (2010). Dynamic voltage and
frequency scaling: The laws of diminishing returns.
In Proceedings of the 2010 international conference
on Power aware computing and systems, pages 1–8.
USENIX Association.
Maurer, U. and Tessaro, S. (2007). Domain extension of
public random functions: Beyond the birthday bar-
rier. In Advances in Cryptology–CRYPTO 2007, pages
187–204. Springer.
Merkle, R. C. (1982). Method of providing digital signa-
tures. US Patent 4,309,569.
Merkle, R. C. (1990). A certified digital signature. In
Advances in Cryptology–CRYPTO 1989 Proceedings,
pages 218–238. Springer.
Semeraro, G., Magklis, G., Balasubramonian, R., Al-
bonesi, D. H., Dwarkadas, S., and Scott, M. L.
(2002). Energy-efficient processor design using mul-
tiple clock domains with dynamic voltage and fre-
quency scaling. In High-Performance Computer Ar-
chitecture, 2002. Proceedings. Eighth International
Symposium on, pages 29–40. IEEE.
Seshadri, A., Luk, M., Shi, E., Perrig, A., van Doorn, L.,
and Khosla, P. (2005). Pioneer: verifying code in-
tegrity and enforcing untampered code execution on
legacy systems. ACM SIGOPS Operating Systems Re-
view, 39(5):1–16.
Shacham, H. (2007). The geometry of innocent flesh on the
bone: Return-into-libc without function calls (on the
x86). In Proceedings of the 14th ACM Conference on
Computer and Communications Security, pages 552–
561. ACM.
Symantec (2015). 2015 Internet Security
Threat Report. Accessed online at:
https://www4.symantec.com/mktginfo/whitepaper/
ISTR/21347932 GA-internet-security-threat-report-
volume-20-2015-social v2.pdf.
Wojtczuk, R. (2008). Subverting the xen hypervisor. Black
Hat USA, 2008.
Yan, Q., Han, J., Li, Y., Deng, R. H., and Li, T. (2011).
A software-based root-of-trust primitive on multicore
platforms. In Proceedings of the 6th ACM Symposium
on Information, Computer and Communications Se-
curity, pages 334–343. ACM.
[Appendix 1]
In this section we formally define the chunk-based
hashing construction, and prove it cryptographically
secure, under the assumption that so is the basic hash
function used as a component. The notion of security
we use is that of collision-resistance (also known as
collision-intractability) as typically done in the cryp-
tography literature.
Informally speaking, a function H is collision-
resistant if it is hard for an efficient adversary, who
is given the full code of H, to find two inputs x, x
0
such that x 6= x
0
and H(x) = H(x
0
), unless with ex-
tremely small probability. Let H : {0, 1}
b
→ {0, 1}
L
denote a collision-resistant hash function, for integers
b > L > 0 (e.g., if H=SHA256, then L=256). Based
on H, we define a chunk-based hash function cbH by
repeated parallel applications of H to the current in-
put sequence, until the latter is compressed to a single
block. The current input sequence is first set to the in-
put to the chunk-based hash function, and from then
on as the output of the parallel applications of H, af-
ter concatenation and padding. As defined so far, this
function can be proved to be collision-resistant if so is
H and if the function is only evaluated on inputs of the
same, predefined, length. To efficiently extend this
function to one that remains collision-resistant even
when it is evaluated on inputs of different lengths,
function cbH pads the computed single block with the
input length, and then uses this string as the input for
one last hashing step using H. The computed block
will be the output of hash function cbH. Padding the
sequence of input blocks with the input length has
been used for similar reasons in Merkle-Damgaard’s
fully-sequential paradigm for extension of the domain
of collision-resistant hash functions (Merkle, 1990;
Damg
˚
ard, 1990).
Let N be an integer > 0, and consider the chunk-
based hash function cbH : {0, 1}
Nb
→ {0, 1}
L
defined
as follows. On input a sequence of N blocks x =
x[1], ..., x[N], each of length b, cbH works as showin
in Algorithm 1.
Algorithm 1: Chunk-Based Hashing Algorithm.
1: Set i = 1, N(1) = N
2: repeat
3: Let y[ j] = H(x[ j]), for j = 1, ..., N(i)
4: Concatenate y[1], ..., y[N(i)] into M(i) blocks
t[1], ..., t[M(i)], each of length b, possibly
padding the last block to length b
5: Set x[ j] = t[ j], for j = 1, ..., M(i)
6: Set i = i + 1
7: Set N(i) = M(i − 1)
8: until M[i] = 1
9: Set b-bit blocks u = x[1] and v = N ∗ b, and set
z = H(u|v)
10: Output: z
We now claim and prove the main result for func-
CLOSER 2018 - 8th International Conference on Cloud Computing and Services Science
246

tion cbH.
Theorem 1 . If H is collision-resistant then so is cbH
To prove this theorem, we prove the equiva-
lent contrapositive version: if cbH is not collision-
resistant then so is H. This is done by showing that if
an efficient adversary algorithm cbA finds a collision
in cbH, then we can construct an efficient adversary
algorithm A that finds a collision in H, with the same
probability. Let (x, x
0
) be the collision found by cbA in
cbH, where x = x[1], ..., x[N] and x
0
= x
0
[1], ..., x
0
[N
0
].
We distinguish two cases: N 6= N
0
, and N = N
0
.
Case N 6= N
0
: Note that z = H(x[1]|N ∗ b) and
z = H(x
0
[1]|N
0
∗ b), where x[1] and x
0
[1] here denote
the values computed at the end of step 8 of cbH on
input, respectively, x and x
0
. Because N 6= N
0
, the pair
(x[1]|N ∗ b, x
0
[1]|N
0
∗ b) is a collision for H.
Case N = N
0
. Note that z = H(x[1]|N ∗ b) and
z = H(x
0
[1]|N ∗ b), where x[1] and x
0
[1] are the values
computed at the end of step 8 of cbH on input, respec-
tively, x and x
0
. Let i(max) denote the highest index
such that x[ j] 6= x
0
[ j], for j = 1, ..., M(i(max)), where
x[1], ..., x[M(i(max))] and x
0
[1], ..., x
0
[M(i(max))] here
denote the values computed at the i(max)
th
execution
of the repeat loop in step 2 of cbH on input, respec-
tively, x and x
0
. By the maximality of i(max), we
obtain that H(x[ j]) = H(x
0
[ j]), for at least one value
j in {1, ..., M(i(max))}, which implies that the value
(x[ j], x
0
[ j]) satisfying this condition is a collision for
H.
Runtime Attestation for IAAS Clouds
247
