
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning
in Virtual Environments
Noura Joudieh
1 a
, Djadja Jean Delest Djadja
2 b
, Ludovic Hamon
2 c
and S
´
ebastien George
2 d
1
Faculty of Sciences, Lebanese University, Hadat, Lebanon
2
LIUM, Le Mans University, Le Mans, France
Keywords:
Virtual Learning Environment, Gesture Learning- Evaluation Set up, 3D Checkpoints, Random Forest.
Abstract:
Nowadays, Virtual Learning Environments (VLE) dedicated to learning gestures are more and more used in
sports, surgery, and in every domain where accurate and complex technical skills are required. Indeed, one
can learn from the observation and imitation of a recorded task, performed by the teacher, through a 3D
virtual avatar. In addition, the student’s performance can be automatically compared to that of the teacher by
considering kinematic, dynamic, or geometric properties. The motions of the body parts or the manipulated
objects can be considered as a whole, or temporally and spatially decomposed into a set of ordered steps, to
make the learning process easier. In this context, CheckPoints (CPs) i.e. simple 3D shapes acting as “visible
landmarks”, with which a body part or an object must go through, can help in the definition of those steps.
However, manually setting CPs can be a tedious task especially when they are numerous. In this paper, we
propose a machine learning-based system that predicts the number and the 3D position of CPs, given some
demonstrations of the task to learn in the VLE. The underlying pipeline used two models: (a) the “window
model” predicts the temporal parts of the demonstrated motion that may hold a CP and (b) the “position model”
predicts the 3D position of the CP for each predicted part from (a). The pipeline is applied to three learning
activities: (i) glass manipulation (ii), geometric shapes drawing and (iii), a dilution process in biology. For
each activity, the F1-score is equal to or higher than 70% for the “window model”, while the Normalized Root
Mean Squared Error (NRMSE) is below 0.07 for the “position model”.
1 INTRODUCTION
Virtual Learning Environments (VLE) hold signifi-
cant educational value as they can provide safe and
engaging learning situations (Adolf et al., 2019). The
effectiveness of learning mainly relies on the design
of appropriate sensory-multimodal feedback, bring-
ing pedagogical information to the learners in re-
sponse to their natural interactions (Liu et al., 2020).
Nowadays, those natural interactions are supported by
the democratization of motion capture interfaces and
therefore, VLE dedicated to the learning of motions
and technical gestures can be built. In sports, medical
domains, and all other domains requiring the mastery
of non-trivial gestures of the body parts and manip-
ulated objects, VLE offers simple and efficient ped-
a
https://orcid.org/0000-0003-3142-2962
b
https://orcid.org/0000-0001-7923-0690
c
https://orcid.org/0000-0002-3036-0854
d
https://orcid.org/0000-0003-0812-0712
agogical means (Park et al., 2017; H
¨
ulsmann et al.,
2018; Jeanne et al., 2017). One can, for example,
demonstrate the task to learn in the Virtual Environ-
ment (VE), according to an observation and imitation
strategy thanks to the visualization of 3D captured
motions (Le Naour et al., 2019; Djadja. et al., 2020).
As the perception abilities of the users (i.e. learn-
ers and teachers) can be challenged in the context of
quick or complex gestures, VLE can be enhanced by
some evaluation and assistance abilities with the au-
tomatic computation of geometric, kinematic, and dy-
namic features (Larboulette and Gibet, 2015; Fazeli
et al., 2018). From the recording process to the evalu-
ation and restitution part, the performed gestures can
be considered as a whole or decomposed in steps to
make easier the learning (Le Naour et al., 2019). In
this last case, we proposed a method that allows any
teacher to build an evaluation process, by making a
demonstration and using 3D Checkpoints (CPs) rep-
resenting those steps (Djadja. et al., 2020). CPs are
3D geometrical shapes (i.e. 3D rectangle or sphere),
Joudieh, N., Jean Delest Djadja, D., Hamon, L. and George, S.
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments.
DOI: 10.5220/0011618100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
39-51
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
39

placed by the teacher in VE, with which a body part or
a manipulated object must go through. The use of CPs
can be very valuable as: (i) the motions can be auto-
matically segmented from unwanted or noisy motions
performed before or after the task and (ii), each step
can be independently replayed and analyzed. How-
ever, it can be a tough job to create CPs and place
them in VLE depending on the complexity and the
accuracy of the task to learn.
Contribution: The core contribution of this work
relies on a method to automatically decompose the
gesture-based task to learn in VR, in temporal and
spatial steps, from demonstrations of the teacher. This
method was implemented through a system, using
Machine Learning (ML) tools, to predict the num-
ber of required CPs as well as their configuration.
To achieve this goal, an architecture with two ML-
based models was designed. Given some motion files
of the same task to learn, the first model uses a ran-
dom forest to predict the time windows, in the files,
where a collision may occur with a CP. A second ran-
dom forest gives, for each window, the 3D position
of the CP in the VLE. This architecture was tested
on three different learning activities: a glass manip-
ulation, a shape drawing task, and a dilution task in
biology with very good results in terms of prediction.
This method can be applied to any manual learning
task in VR, on any object or body part whose mo-
tions must be learned. However, its predictive perfor-
mances must still be studied in other contexts. One
will note that: (a) contributing to the machine learn-
ing theory field is out of the scope of this paper and (b)
this paper does not focus on the interest of decompos-
ing a gesture-based task to make easier its teaching
and learning in VR, as it was studied in our previous
works (Djadja. et al., 2020; Le Naour et al., 2019).
The remainder of this paper is organized as fol-
lows. Section 2 gives an overview of related work fo-
cusing on VLE dedicated to the learning of technical
gestures, from the point of view of the evaluation pro-
cess and its building. Section 3 delves deeper into the
methodology by presenting the learning activities, the
system architecture, and the two ML models. Section
4 focuses on the data-generating process, the applica-
tion of the pipeline for each of the three activities, and
the results. Section 5 discusses the results and current
findings and section 6 concludes the paper and gives
directions for future work.
2 RELATED WORK
Thanks to the democratization of Virtual Reality (VR)
and motion capture technologies, several domains can
benefit from VLE to assist users in learning and evalu-
ating their motions (de Morais and Wickstr
¨
om, 2011;
Chiang et al., 2018; Sror et al., 2019). For exam-
ple, (Swee et al., 2017) proposed a VR application
for post-stroke rehabilitation. A Microsoft Kinect and
Leap Motion sensor were used to strengthen hand
muscles, improve finger motor dysfunctions, post-
stroke balance skills, and walking through: (1) a pick
and place activity and (2), a balance & movement
rehabilitation training. Users are mainly evaluated
through time measurement over trials in addition to
task completion. In a simulation for learning carpen-
try, learners’ performances were evaluated through
a comparison between the curves of their skills and
those of the experts (Jose et al., 2016). The sys-
tem recorded the user’s activity (e.g. position of the
working tool, downward pressure, number of broken
blades) and calculated metrics (e.g. straightness of the
cut, its speed, downwards force, cut mark deviation,
angular inclination, the time needed). For learning
manual assembly, (Pilati et al., 2020; Rold
´
an et al.,
2019) proposed a training system that can assist op-
erators involved in such gesture-based procedures in
real-time. Experts executed consecutive sequences
of actions for the assembly of objects in various sit-
uations. Then the systems memorized all these se-
quences to verify that the learners’ movements were
correctly executed through various methods such as
the use of ”Control Volumes (CVs)” i.e. a pre-defined
geometrical shape to check if the body joints ”enters
into”/”exits from” it.
The gesture or motion evaluation is a contextual
dependent task that is still hard to define i.e. de-
pending on the final purpose of the performed mo-
tion, the pedagogical strategy, the observations needs,
etc. (Djadja. et al., 2020). In addition, the evalua-
tion can be done by observing whether the object or
body part respects an ordered (or not) set of action
sequences. For instance, (L
´
ecuyer et al., 2020) pro-
posed an editor allowing the visual representation of
action sequences in terms of VR scenarios. The action
sequences were extracted from the expert demonstra-
tion using #FIVE (Bouville et al., 2015) and #SEVEN
(Claude et al., 2014) (cited by (L
´
ecuyer et al., 2020))
models. #FIVE is an object-relation model to rep-
resent interactions based on four main concepts: ob-
jects, types, relations, and object patterns. Objects are
enriched with types to make them interactive and the
relations use those types to perform the interaction.
#SEVEN uses a Petri net to represent the sequenced
scenario: the places indicate the states of the scenario
and the transitions are triggered by changes in the en-
vironment. The expert was able to edit the sequence
on demand to have a more complex one for instance.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
40

The work of (L
´
ecuyer et al., 2020) was used for the
learning of the preparation procedures of a room be-
fore surgery. Unfortunately, the underlying motions
of the user leading to the object manipulations are not
evaluated, resulting in a loss of information for pro-
fessional gesture learning.
When the movement is considered as a time series
made of position and orientation of body joints or ma-
nipulated objects, several approaches could be used
such as the observation and imitation of 3D avatars.
For example, (Kora et al., 2015) developed a golf
learning support environment where the learner can
mimic and practice golf swing. They used Microsoft
Kinect to record, save and replay learner’s body data,
displayed with the expert one, simultaneously super-
imposed in real-time. Although widely used, this
method suffers from the problem of temporal and
spatial synchronization of both motions. (Le Naour
et al., 2019) performed a deep review of the benefits
of 3D model observation for motion learning. They
compared different visualization techniques using the
learner’s virtual avatar and that of the teacher (e.g. su-
perimposed or not; both concurrently played or not,
played during the task or after). The task was the
throwing of a rugby ball and they highlighted the ben-
efits of a superimposed approach. In addition, a new
metric to measure the spatial regularity of the motion,
based on the Dynamic Time Warping (DTW) algo-
rithm was produced. Using 3D virtual avatars for mo-
tion learning is strongly related to the perception abil-
ities of users that can be challenged with complex, ac-
curate, and/or quick gestures. Therefore, some stud-
ies such as those of (Morel, 2017), deeply investigated
the use of an automatic evaluation based on DTW
techniques. They also automatically displayed spatial
and temporal errors with visual colors on the joints
to assist students in learning a tennis serve and karate
motions (Morel et al., 2017). However other metrics
can be considered to evaluate gestures.
Motions can be evaluated using kinematic, dy-
namic, and/or geometric metrics. (Larboulette and
Gibet, 2015) made an overview of those descriptors
representing the expressiveness of motions, accord-
ing to the three previously cited kinds considered as
“low-level” descriptors. They also identified “high-
level” ones, computed from ”low-level” metrics, and
classified them into four categories (i.e. body, space,
shape, effort). They represent “kinematic, spatial or
physical quantities that can give rise to an interpre-
tation by movement experts”. (Kico and Liarokapis,
2020) proposed a mobile Augmented Reality (AR)
application for assisting the process of learning folk
dance. 37 passive markers were used to capture body
motions to: (i) analyze for each joint, the angle be-
tween quaternions in two successive frames that are
saved in a vector, (ii) create, from this vector, an-
other vector that contains a score for each joint, by
comparing the learner’s and teacher’s motions using
DTW and (iii), get the total score as the mean value
of all values calculated, for the joints, by using the
previous vector. Contextual metrics had also been
used in the context of gait analysis of patients (Jarchi
et al., 2018). For instance, step length, stance du-
ration, lateral foot position, walk ratio, swing dura-
tion, etc., helped doctors to differentiate the precise
gait characteristics of normal healthy subjects, from
those of people with pathologies causing gait disor-
ders. There is a variety of metrics that can help users
in evaluating their movements. Among them, kine-
matic and geometric metrics (e.g. velocity, acceler-
ation, bounding box/space) are easily calculable and
convertible into high-level descriptors to get the ap-
propriate multimodal feedback in VLE (Larboulette
and Gibet, 2015). However, by often spatially and
temporally analyzing the motion as a whole, the user
can miss some steps of a complex motion to learn.
There is a diversity of evaluation metrics, and once
they have been chosen, their thresholds/acceptance
intervals must be defined which can be a hard task.
For example, in a virtual training system for physi-
cal therapy, (Wei et al., 2015) used Bayesian Deci-
sion Theory to define a threshold for a metric named
”the accuracy of the users”. However, this method
is not fully automated, indeed, the experts must con-
struct a database made of users’ motions with their
performance score computed from the expert evalu-
ation and the DTW score. To avoid these kinds of
issues, several works used Machine Learning (ML)
for motion evaluation in a learning context (see the
second to last paragraph of this section). Moreover,
VLEs dedicated to the learning of motions have other
shortcomings such as: (a) not considering the gestures
as a time series made of geometrical data composed
of clear and observable temporal and spatial steps and
(b), the lack of editing and adaptation abilities regard-
ing the task to learn. Indeed, in a VLE, the teacher
usually cannot: (i) create their own demonstration be-
ing the comparison and guidance point of the task (b),
choose objects/artefacts that must be observed, and
(c), define their steps and metrics for the evaluation.
To counterbalance these issues, we introduced a
framework called MEVEL that can import any built
VLEs, made with Unity Engine, with the aim of in-
corporating a set of ordered CheckPoints (CPs) as
3D visible geometrical shapes (i.e. 3D rectangle or
sphere) (Djadja. et al., 2020). Within the VLE, the
teacher can place, rotate and size three kinds of CPs
(Djadja. et al., 2020): Starting CheckPoint (SCP),
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments
41

Intermediate CheckPoints (ICP), and Ending Check-
Points (ECP). The SCP and ECP were used to state
the beginning and end of the motion, whereas the ICP
were numbered CPs representing each sub-step of the
gesture-based task to learn. Beforehand, the teacher
chose an Object of Interest (OI) i.e. the virtual object
or the part of the user body from which the motion
must be studied and go through the CPs. The teacher
made a demonstration of the task that can be replayed,
step by step at will, and used to make some compar-
isons. A complex task being composed of several
steps and each step requiring an ICP, it can be hard
for the teacher to create those CPs and place them in
the VLE, even with a natural interaction as the one
proposed by (Dimmel and Bock, 2017). A first idea is
to use ML to automate the creation of ICPs given the
features of the gestures to learn in accordance with the
observation needs.
Furthermore, in the context of learning gestures,
ML has been used with efficiency for different pur-
poses. (Brock and Ohgi, 2017) designed a system
for the automatic recognition of flight-style errors in
ski jumping. They positioned inertial sensors to mea-
sure the motion of all necessary limbs. A set of mo-
tions was annotated by an expert, and transformed
into a set of features (e.g. mean, variance, skewness
of data points on the same dimension, acceleration,
and angular velocities). A Support-Vector Machine
(SVM) was trained with the labeled motion captures.
The average accuracy of the error recognition, rating
between 60 and 75%, indicated the applicability of
the system. Moving to the medical field, (Winkler-
Schwartz et al., 2019) used ML to classify the surgical
expertise of participants when performing a resection
of a neurosurgical tumor. The raw data extracted from
each trial were transformed into 270 metrics (e.g. ve-
locity, acceleration, and jerk of the instrument, the
rate of change in volume of the tumor). Finally, they
tested four different algorithms for which a set of fea-
tures was selected for each by an iterative process. An
accuracy of 90% was achieved using six performance
features by k-Nearest Neighbor (K-NN). (D’Amato
et al., 2020) collected motion capture data from vio-
lin exercises to train a Random Forest (RF). The level
of skills of violin players (i.e. novice or expert) were
classified. A 10s time window parsed the data and
is converted to a set of features including the mean,
the signal-pair correlation, and the signal magnitude
area for both the time and frequency domain. Us-
ing two different scenarios, RF attained an average
of 77%, 71%, and 63% for respectively the accuracy,
precision, and recall. In a learning situation on how
to troubleshoot a surgical robot, (Moore et al., 2020)
employed an SVM to predict which group (i.e. low
learning or high learning) each participant belongs to,
based on the linear and angular velocities of the Head-
Mounted Display (HMD) and controllers. They ex-
plored the Principal Component Analysis (PCA) and
the convex matrix factorizations for the feature rep-
resentations. Their results showed that the velocities
of the HMD and controllers yielded a high mean ac-
curacy for both the training (85.7%) and testing data
(93.1%).
The aforementioned examples of studies give con-
crete hopes in terms of automatic evaluation of the
learner’s progression, skills, or level. However, to
our knowledge, none of them used ML with mo-
tion capture data to predict the steps of a gesture to
learn, represented by a set of 3D virtual checkpoints.
Consequently, this work focuses on a methodological
proposal to automatically predict, from task demon-
strations, the number of required ICPs as well as
their probable positions in the VLE, using a machine
learning-based architecture. Note that, only ICPs are
considered here, the SCP and ECP being manually
placed, to automatically segment in time and space
the motion (Djadja. et al., 2020). Indeed, in multi-
ple cases, SCP and ECP usually correspond to well-
identified and simple actions leading to collision or
event detection (e.g. taking/releasing a specific tool
or object).
3 METHODOLOGY
In this section, the overall methodology is described
and consists in building an architecture aiming at two
goals given some motions of the task to learn: (i)
predicting all the steps of the task by guessing the
number of required ICPs and (ii), estimating, for each
ICP, the 3D position in the VLE. After describing the
three learning activities considered in this study, and
the structure of the raw captured data, we present, for
each goal, the considered input and output data from
which the problem is formalized from the ML per-
spective. The choice of the appropriate ML algorithm
and its main parameters are given from the results of
a cross-validation process.
3.1 Learning Activities
Following the novelty of the problem and the method
to solve it, two simple learning activities are tested
to give some insights into the method’s validity.
Afterward, we applied it to two steps of a real
practical case in biology. Figure 1 presents all the
pictures of the considered activities.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
42
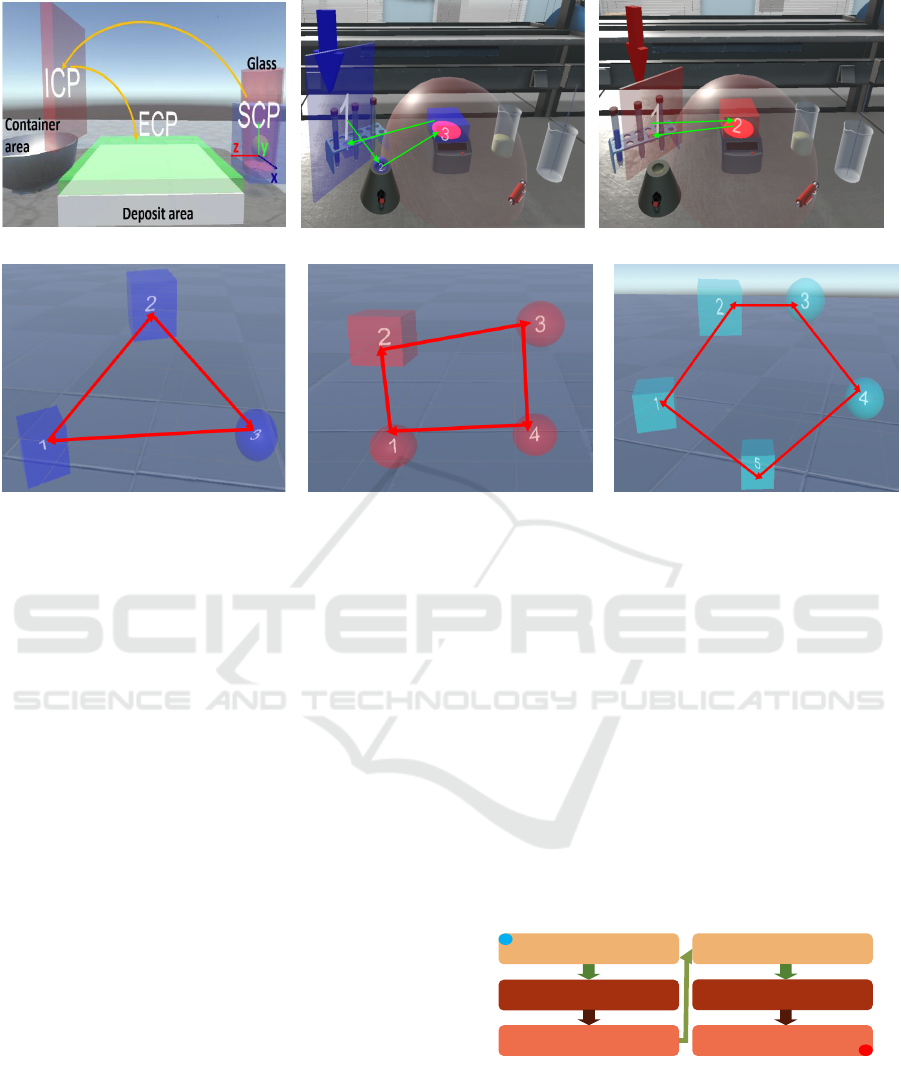
(a) Glass manipulation task (b) Dilution task - step 1 (c) Dilution task - step 2
(d) 3-sided polygon task (e) 4-sided polygon task (f) 5-sided polygon task
Figure 1: Examples of the considered tasks in VLE.
- Glass Manipulation: The goal is to hold the glass
containing a ball, drop the ball in the container, turn
the glass, and put it in the deposit area (figure 1a).
This activity is made of one ICP and used as a “toy
problem” in the context of manipulating an object.
- Geometrical Shape Drawing: The learner must
draw, with one hand the exact shape of 3-sided,
4-sided, and 5-sided polygons demonstrated by the
teacher (figure 1d, e, f). This task was chosen to
increase the number of ICPs (i.e. as many as the
number of sides) and illustrate steps not detectable
by trivial collisions between 3D objects.
- Dilution: Dilution is the action of adding a liquid
to decrease the concentration of a solution. This task
requires several phases following a strict protocol
in case of dangerous solutions. Among them, we
will focus on two phases. Phase 1: (a) taking the
test tube containing the solution (b), homogenizing
it (c), sterilizing its opening after opening it, and
(d), putting it in its place after closing it. Phase
2: (a) taking the test tube containing the liquid
(b), sterilizing its opening after opening it, and (c),
putting it in its place after closing it. Phases 1 and 2
respectively require 2 and 1 ICP(s) (figure 1b, c).
3.2 System Architecture
For predicting the number and the configuration of
ICPs, the proposed architecture requires taking the
motion files of a task demonstration as an input and
outputs 4 targets: the number of required ICPs, and
their 3D positions i.e. Px, Py, Pz. For this first study,
the orientation and dimension of the ICP are not yet
considered (see the last paragraph of section 5 for this
non-trivial problem). The problem can be separated
into two modules for each step. The first step is to
predict all time windows in the motion file that may
hold an ICP, while the second step is to estimate the
3D position of the ICP given all the data contained in
each time window (figure 2).
Apply Window Model
Apply Position Model
Local Motion File of OI Predicted window with ICP
Predicted Windows with ICP
Predicted Number of ICP
3D Position of ICP(s)
S
E
Figure 2: Pipeline for the system architecture.
3.3 Raw Data Structure and Time
Window
A recorded demonstration of a task by the teacher
consists of saving in a file: (a) the 3D positions of
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments
43

the Object of Interest (OI) taken in reference to the
local coordinate system placed at the SCP (Djadja.
et al., 2020) and (b), the collision of the OI with the
CPs, manually placed beforehand by the teacher in
the VLE. A motion file has the structure seen in Ta-
ble 1. The ”CPType” specifies the type of checkpoint
(”SCP”, ”ICP”, ”ECP” or ”None” if there is no col-
lision) that the OI may collide with, at each recorded
time ”t”. The data used to build the training and test
sets are made of data points between the SCP and the
ECP, these two kinds of CP(s) are considered as given
in any case. The term ”frame” represents ”one data
point” made of the 3D position Px, Py, Pz of the OI,
and the value of the ”CPType” field. A ”time win-
dow” is used to parse motion and get a subset of ”w”
consecutive frames in time, ”w” being its size.
Table 1: Data structure of a motion file.
Px Py Pz Time CPType
3.4 Time Window Prediction Module
For the first step, given the motion files of an OI, we
try to predict which parts of the motion can hold an
ICP. The time window parses the motion file every
”w” frames (Figure 3) and we check, for each ”win-
dow”, if it can hold an ICP, or not, thanks to an ML-
based model. ”holding/containing an ICP” means that
the OI collides with an ICP at any of the data points
belonging to the time window.
Figure 3: Example of dividing data into time windows with
size 3.
3.4.1 Input/Output Data and Problem
Formalization
Each window is converted to a row of features made
of the mean of kinematic metrics (Larboulette and
Gibet, 2015): velocity (vel), acceleration (acc), cur-
vature (curve), and jerk (table 2). These inputs of the
ML model were selected for their wide use in motion
analysis (Vabalas et al., 2020; Kacem et al., 2018;
Kapur et al., 2005) (also see section 2 paragraphs 4
and 7). The binary label ”Has ICP” is the output of
the model that states whether a window contains an
ICP (value 1) or not (value 0). A training file with
rows of feature vectors coming from all motion files
is constructed after the application of Savitzky Golay
filter
1
to remove the noise due to an unstable frame
rate (Savitzky and Golay, 1964; Schafer, 2011). The
inputs are normalized by the mean. Therefore, this
is a usual supervised classification problem with 4
inputs and a binary output.
Table 2: Structure of training dataset for the window model.
Mean Vel Mean Acc Mean Curv Mean Jerk Has ICP
3.4.2 ML Algorithm Choice and
Cross-Validation
The input data are used to train and test a Random
Forest Classifier (RFC) (Breiman, 2001) with 200
trees, where the inputs are the first 4 features men-
tioned in the previous section and the output is the bi-
nary ”Has ICP” feature. The RFC was chosen as fol-
lows. Among the existing classification ML models,
the appropriate one for our case must have suitability
with motion data, good performances with both large
and especially small datasets. Indeed, the availabil-
ity of a large number of motion files from a learning
activity is not guaranteed as these data are provided
by the teachers through their demonstrations (see the
fourth paragraph of section 5 for more details).
A comparison of seven different supervised ML
classification algorithms namely: Decision Tree, Ran-
dom Forest (RF), Na
¨
ıve Bayes (NB), SVM, Neu-
ral Networks (Perceptron), JRip, and Decision Table
done by (Akinsola, 2017) concluded that RF, SVM,
and Na
¨
ıve Bayes can offer high accuracy and preci-
sion regardless of the number of attributes, and the
number of records in the dataset. They applied these
algorithms on the same dataset while changing its
number of attributes and number of instances, thus
testing with a large dataset and a small one. Based
on this comparison, we limited the choice of the algo-
rithm to either RFC, SVM, or NB.
To further select one final machine learning
model, five-fold cross-validation was performed on
each using all the motion files of the training set col-
lected for each activity. The performance of each with
every fold is evaluated using the F1 metric. The de-
fault hyperparameters were used for each model.
RFC was chosen as it ranked first with the highest
F1 score for the three learning activities (table 3). In
the process, several numbers of trees were tested but
all were not presented as: (i) significant results but
not satisfying ones were obtained from 100 trees (ii),
200 gave satisfying ones, and (iii) a significant dif-
ference was not observed above 200 trees. Multiple
values (10, 15, 25,...60, 90) for the size of the win-
1
A polyorder of 2 and a window size 25 were used as
usual parameters in this context
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
44

Table 3: Model selection for the time window prediction.
Learning Activity Window Size ML Model F1
Glass Manipulation 60
RFC 0.707
SVM 0.66
Na
¨
ıve Bayes 0.62
Shapes Drawing 30
RFC 0.63
SVM 0.6
Na
¨
ıve Bayes 0.32
Dilution 60
RFC 0.67
SVM 0.51
Na
¨
ıve Bayes 0.41
dow were also tested for each learning activity, the
size was chosen relative to what achieves a balance
between the accuracy of the model and the size of the
motion files.
3.5 3 D Positions Estimation Module
The first part of the work predicts, for a given motion
file, the possible time windows that may hold an ICP.
The second step aims to estimate the ICP 3D position
for each predicted time window.
3.5.1 Input/Output Data and Problem
Formalization
The first step can generate false positives that must be
avoided. Therefore, to generate the training samples
for this second step, we take the time windows con-
taining the ICPs directly from the dataset, following
the parsing method described in the first paragraph of
section 3.4. Each window is converted to a row of
kinematic features (i.e. velocity/acceleration mean)
and geometrical ones (i.e. the maximum/minimum
of each component of the position acting as bound-
ing volume around the ICP position) considering their
good performances in the literature (Vabalas et al.,
2020; Kacem et al., 2018; Kapur et al., 2005) (also
see section 2, paragraphs 4 and 7). The data contained
in the generated training file were normalized by the
mean before training. The problem becomes a regres-
sion problem of 8 input features and 3 output features
(3D Position of the ICP) (Table 4).
Table 4: Features of the training dataset for the position
model.
Mean Vel Mean Acc Max px Max py
Max pz Min px Min py Min pz
ICP px ICP py ICP pz
3.5.2 ML Algorithm Choice and
Cross-Validation
The best model must perform well with small datasets
and be suitable for this kind of data. A Random For-
est Regressor (RFR) is the first candidate, as it works
well for motion analysis (Baoxing and Bo, 2018). To
approve its suitability with our training data, we per-
formed a cross-validation to compare RFR with Sup-
port Vector Regressor (SVR) that was also reported
to be a strong regression model (Izonin et al., 2021;
Giarmatzis et al., 2020; Thomas et al., 2017). The de-
fault hyper-parameters were also used for each model.
Note that RFR supports multiple outputs, while SVR
does not. Therefore, a Multi-Output Regressor (Bor-
chani et al., 2015) was used with SVR as a kernel. The
two candidate models were evaluated using the Root
Mean Squared Error (RMSE). RFR with 200 trees at-
Table 5: Model selection for the position prediction.
Learning Activity Window Size ML Model RMSE
Glass Manipulation 60
RFR 0.06
SVR 0.1
Shapes Drawing 30
RFR 0.07
SVR 0.09
Dilution 60
RFR 0.008
SVR 0.06
tained lower RMSE than SVR for the three learning
activities, thus it was chosen to be the core of the po-
sition model (Table 5). Other numbers of trees were
tested but they did not give better results above 200 or
satisfying results under 200. As for the window size,
the final decision was achieved in a similar fashion to
the time window model.
4 IMPLEMENTATION AND
RESULTS
The proposed architecture is applied to the three
learning activities. In this section, details about the
dataset generated for each activity are given, as well
as the application method and the results obtained
once the models are trained and tested.
4.1 Training and Test Sets
The data collected is a set of demonstrations for
each activity. To generate enough variability, several
different configurations are defined for each task to
learn. A configuration represents the positions of the
3D objects of the VLE and the placement of CPs. For
each configuration, we make several demonstrations.
For each learning activity, the OI, the ICPs, and the
number of configurations and demonstrations are de-
scribed
2
.
2
Click here for the collected data, video of the three
activities, predicted ICPs and configuration examples
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments
45

- Glass Manipulation: OI was the glass. One ICP
was used close to the container. 10 configurations
were set and an average of 10 demonstrations were
generated for each configuration, to end up with 106
demonstrations.
- Shapes Drawing: The OI is the right hand. The
number of ICPs varied among 1, 2, and 3 ICPs to
draw 3, 4, and 5-sided polygons respectively. 115
demonstrations were done per configuration to end
up with 345 motion files.
- Dilution: Two configurations were set (one configu-
ration for each phase described in section 3.1) and 100
demonstrations were done for each configuration. For
the first configuration, the OI is the first test tube hav-
ing the solution. Two ICPs are used: one close to the
homogenizing device and one close to the heating de-
vice for sterilizing. For the second configuration, the
OI is the test tube holding the diluted solution. One
ICP is used close to the heating device for sterilizing.
A total of 200 motion files were recorded.
The dataset was divided into a training set (80% of the
data) and a test set (20% of the data).
4.2 Implementation and Evaluation
Strategy
All the architecture was coded using python language
with the scikit-learn library. Given a chosen window
size “w”, for each learning activity, we trained one
window model and one position model. The training
process and test one were run with the same window
size. The scripts were run on an Intel(R) Core(TM)
i7-7500U laptop with 8GB RAM. The VLE was made
using Unity 2019.4.19f1 and the headset used is the
HTC Vive Pro. Multiple window sizes were tested
and only the results for three specific values, i.e. 20,
30, and 60, are presented. These values were chosen
to show the main tendencies, while knowing that no
better results were obtained above those values, when
applicable, given the maximum number of frames of
all motion files in each learning scenario (see the sec-
ond paragraph of section 5 for a discussion on the au-
tomation in getting the best window size).
For the training and test phases of the window
model, the files were parsed according to the parsing
method described in the first paragraph of section 3.4.
On each time window, the feature vector, described
in the same section, was computed and normalized
by the mean before giving it to the window model.
To measure the performance of the window model for
each activity, F1-score was used as this model repre-
sents a solution to a classification problem.
For training and testing the position model, we
took all the time windows holding an ICP in the files
(cf. section 3.5.1), computed the feature vector, and
normalized them. The NRMSE evaluates the accu-
racy of the position model as a regression problem. It
represents the Normalized Root Mean Squared Error
(Naser and Alavi, 2020), which can be used to com-
pare the results from datasets with different ranges of
values, as we have three different activities.
4.3 Training
The results of the training process are briefly summa-
rized for each learning activity through the considered
evaluation metrics described in section 4.2. The train-
ing process takes around 1 minute for each learning
activity and table 6 depicts very good results, in terms
of model convergence, both for the window model
F1-score, and the position model NRMSE.
Table 6: Results of the training process for position and
window models.
Learning Activity Window Size NRMSE F1 Score
Glass Manipulation 60 0.04 99%
Shapes Drawing 30 0.02 99%
Dilution 60 0.02 99%
4.4 Validation
The results of the evaluation process obtained from
the application of the models on the test data are pre-
sented and analyzed.
4.4.1 Time Window Model
For the glass manipulation activity, there were 21
ICPs in total for all the test files (one ICP for each
file). Applying the window model for a window size
equal to 20, 30, and 60 gave the results of table 7, with
a best score for value 60.
Table 7: Accuracy metrics of the window model applied on
the glass manipulation activity with different window sizes.
Window Size Precision Recall F1 Score
20 59% 67% 61%
30 43% 48% 44%
60 71% 76% 72%
In the shape drawing activity, the results are pre-
sented for each configuration separately (i.e. with 1,2
and 3 ICP(s)) and considering all the demonstrations
(around 60 test files) no matter what the configura-
tions are. After applying the window model for val-
ues 20 and 30, a window size equal to 30 has the best
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
46

results (72% for f1-score). 60 is not applicable for
this activity because it is larger than the size of some
motion files. The results are shown in table 8.
Table 8: Accuracy metrics of the window model applied on
the shape drawing activity with different window sizes.
1 ICP 2 ICP 3 ICP Total
Test Files 21 18 20 59
ICP 21 36 60 117
window Precision 62% 89% 91% 81%
size Recall 71% 64% 63% 66%
20 F1-Score 65% 72% 71% 69%
window Precision 71% 62% 91% 75%
size Recall 86% 64% 77% 76%
30 F1-Score 76% 60% 81% 72%
For the dilution activity, the window model is ap-
plied with three different window sizes on 40 test
files. The results show that 60 is the best window size
for this activity (see table 9).
Table 9: Accuracy metrics of the window model applied on
the dilution activity with different window sizes.
Window Size Precision Recall F1 Score
20 42% 31% 35%
30 54% 47% 48%
60 73% 70% 69%
4.4.2 Position Model
For the glass manipulation activity, a window size
equal to 60 is chosen for the position model. From the
21 test files, the 21 time windows having an ICP were
selected and given to the position model to predict,
for each time window, the 3D position of ICP. Simi-
larly, for the shape drawing activity, the same test files
of the window model are used for the position model
with the selected window size 30 to get 117 time win-
dows. As for the dilution activity, a window size equal
to 60 is chosen for the position model leading to the
extraction of 60 time windows. Applying the position
model, gave the results provided in table 10.
Table 10: Accuracy metrics of the position model.
Learning
Activity
Window
Size
Test
Windows
RMSE NRMSE
Glass 60 21 0.02 0.07
Shapes 30 117 0.06 0.05
Dilution 60 60 0.006 0.03
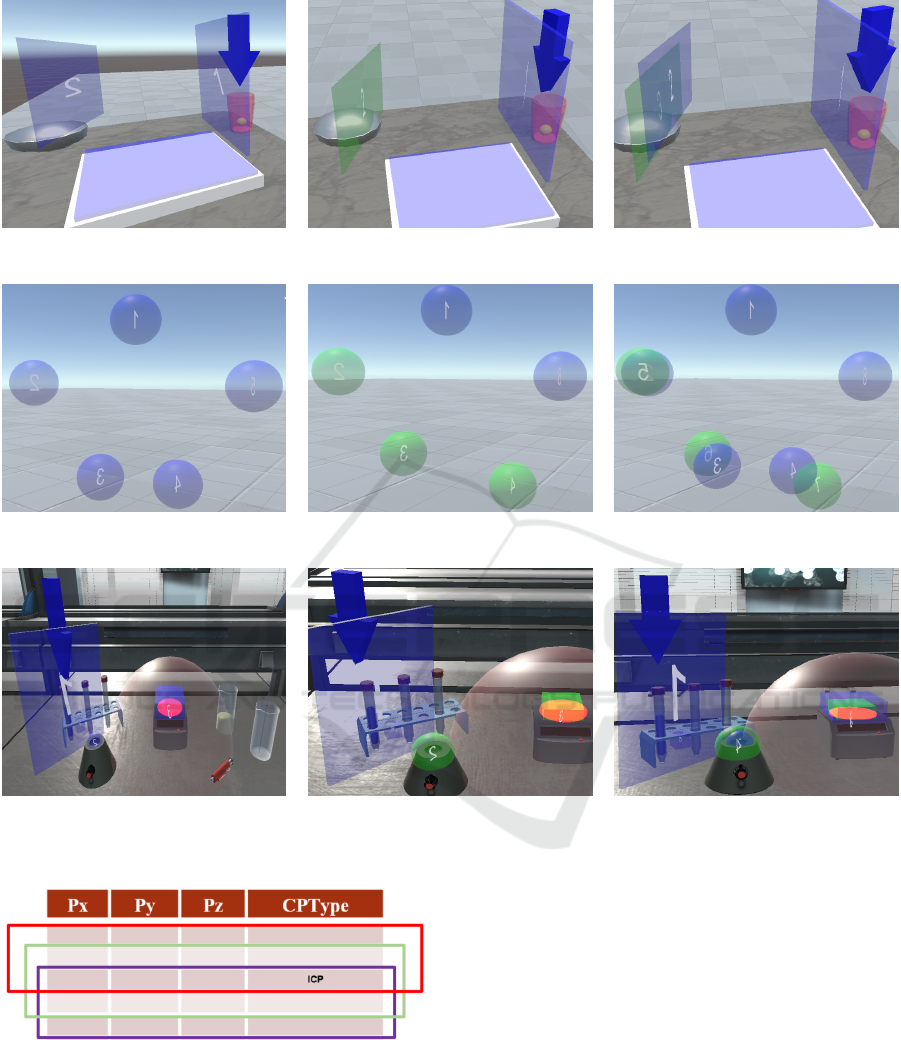
4.5 Application in VLE
To have a concrete idea of the prediction quality in
VLE, figures (4a), (4b) and (4c) show an example of
a configuration for the glass manipulation task with
ICPs manually placed, predicted by our models and
both superimposed respectively. In the same way, fig-
ures (4d), (4e) and (4f) show an example for the ge-
ometrical shape drawing task while figures (4g), (4h)
and (4i) are dedicated to an example for the dilution
task. The predicted ICPs are green and the other blue
CPs are SCP/ECP or manually placed ICPs for the
comparison with the predicted ones. The ICPs orien-
tation and size were manually reproduced in figure 4
(see the last paragraph of the next section for more
explanation).
5 DISCUSSION
We obtained an F1-score equal to or higher than 70%
for the window model regardless of the learning ac-
tivity and an NRMSE equal to or under 0.07 in any
case. Those values are more than acceptable. The
proposed method seems to work with efficiency in
terms of model convergence and testing in the con-
text of the proposed tasks. However, those promising
results must be tempered considering their dependen-
cies to the window size that must be tuned according
to the motion file size.
The automation of the choice of window size
could be performed through a cross-validation pro-
cess. Such a strategy is not trivial as, for the same
task, the motion files can have very different numbers
of frames. A heuristic could be stated considering the
minimum, the maximum, the average, etc., number
of frames. Beforehand, a complementary idea con-
sists in rebuilding each file with the same number of
frames, through an interpolation process rebuilding
each frame, taking the risk to lose the natural and re-
alistic aspect of the motion.
Regarding the training phase, the data used to train
the position model came from the motion files com-
bined with the parsing method described in the begin-
ning of section 3.4, as the window model can return
false positives and miss some ICP(s) (i.e. false neg-
atives). The window model is supposed to give time
windows where the ICP can be, without giving the ex-
act position (or frame index) in this set of data points.
Considering this last point, one can think that the po-
sition model must be trained with data representing
all the possible positions of the ICP in this set. For
instance, if the window size is 3, then the ICP can be
in 3 possible windows, i.e. positioned at the last data
point for the first window, at the center for the second
one, and at the first data point for the third one (see
Figure 5). In case of unsatisfactory results of the posi-
tion model, this strategy could be considered and can
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments
47
(a) Glass manipulation task - ICPs man-
ually placed
(b) Glass manipulation task - ICPs pre-
dicted
(c) Glass manipulation task - ICPs man-
ually placed & predicted
(d) Geometrical shape drawing task -
ICPs manually placed
(e) Geometrical shape drawing task -
ICPs predicted
(f) Geometrical shape drawing task -
ICPs manually placed & predicted
(g) Dilution task - ICPs manually
placed
(h) Dilution task - ICPs predicted (i) Dilution task - ICPs manually placed
& predicted
Figure 4: Some examples of CPs and their ICPs predictions.
Figure 5: Example of considering all the possible positions
of the time window around two ICPs with a window size
equal to 3.
contribute, at the same time, to increasing the sam-
ple number, partially tackling the problem of having
enough samples from a few demonstrations.
Indeed, our proposal can be usable by a teacher
depending on the minimum number of required
demonstrations. We cannot ask them to perform 200
demonstrations for example. Obviously, this is a hard
question depending on many factors (i.e. domain,
task to learn, ergonomics, usability of the VLE, etc.).
However, we can have some insights for the three con-
sidered activities i.e. by studying the evolution of the
window and position model performances with the in-
crease of the percentage of data used for training (as
seen in figures 6 and 7). The motion files collected
for each activity are divided into [training, test] sets,
with [70, 36], [270, 78], and [150,50] for the glass,
drawing shapes, and dilution tasks respectively. As
the graphs show, 70% of training data gives satisfying
metric scores for the three activities. Table 11 shows
for each activity how the ”70%” of motion files are di-
vided among files having 1, 2 or 3 ICP(s). From this,
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
48

it seems that the minimum number of training motion
files required for each number of ICP ranges between
50 and 65. However, this point must be further inves-
tigated before making any conclusions.
Table 11: Minimum number of motion files needed for
training the models.
Activity Training Files 70% 1 ICP 2 ICP 3 ICP
Glass 70 49 49 - -
Shapes 270 189 63 63 63
Dilution 150 105 53 52 -
Glass Task Shapes Task Dilution Task
35
40
45
50
55
60
65
70
75
54
69
64
66
68
67
68
64 64
61
57
62
66
65
71
70
72
73
71 71
44
39
52
62
56
63
61
60
59 59
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Figure 6: F1 score evolution with the percentage of training
data.
Glass Task Shapes Task Dilution Task
0
0.02
0.04
0.06
0.08
0.1
0.12
0.01
0.008
0.009
0.007 0.007 0.007 0.007
0.006
0.006 0.006
0.119
0.107
0.095
0.085
0.082
0.078
0.075
0.074
0.071
0.07
0.1
0.052
0.058
0.043
0.041
0.03
0.024
0.023 0.023
0.021
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Figure 7: RMSE evolution with the percentage of training
data.
Regarding the ICP orientation, a naive approach
consists in extending the position model with new
outputs or building a similar model for only predict-
ing the orientation. This strategy will give unsatis-
factory results as most of the pre-implemented ML
algorithms work with an estimation of the error be-
tween the prediction and the ground truth. From this
estimated error, a discrepancy is computed to evolve
weights or parameters of the hypothesis function that
the ML tries to build. The ML algorithms in the
scikit-learn library use a linear distance to get the er-
ror and the discrepancy. This is correct for the po-
sition, not for the orientation. Indeed, the distance
between two orientations must be computed by using
the geodesic distance if the orientation is formalized
through a triplet of angles for example. That implies
the re-implementation of the ML algorithms.
6 CONCLUSION AND FUTURE
WORK
Our contribution relies on a methodological proposal
to automatically predict, from the demonstrations
of a gesture-based task to learn, the number and 3d
position of the required 3D Intermediate Checkpoints
(ICP). ICPs represent a set of simple and ordered
3D shapes (e.g. sphere, rectangle) from which the
observed motion of an object or a body part must
go through. This concept is used to decompose
the gesture-based task in several spatial and tem-
poral steps to make it easier to learn. By using
an ML-based architecture, the importance of this
contribution dwells in facilitating the building of the
evaluation process by the teacher knowing that some
tasks are complex. For example, a complex/long task
might be divided into 8 sub-tasks where each sub-task
must have its own set of checkpoints (one SCP, one
or more ICP(s), and one ECP). If 4 sub-tasks need 2
steps (i.e. 1 ICP) and the other 4 need 3 steps (i.e. 2
ICPs), the teachers will have to create for this single
task up to 12 ICP(s). There is therefore a major
challenge in automating this task.
The proposed methodology was implemented on 3
different learning activities (i.e. glass manipulation,
shape drawing, biology dilution), obtaining an F1-
score equal to or higher than 70%, regardless of the
learning activity, for the window model guessing the
number of ICPs. The results of the position model
predicting the position of the ICPs in the VLE gave
an NRMSE equal to or under 0.07 in all cases. As for
future considerations, the following points are listed:
- Automating the choice of the window size parsing
the motion files for extracting and computing the
dataset. Indeed the size of the time window can
strongly influence the results and depends on the
number of frames that can significantly vary from
one motion to another one for the same task. We will
work on a method to uniformize the frame number by
rebuilding each motion file through an interpolation
process, according to one or more heuristic to set
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments
49

this number while keeping the natural and realistic
aspect of the task. From those uniformed motions,
we will perform a cross-validation process to get the
appropriate window size given a specific activity.
- Predicting more properties of the ICP configuration
as it is not only defined by its 3D position but
also by its orientation and 3D dimensions in VLE.
The orientation prediction requires recoding the
ML-algorithm parts using the Euclidean distance,
with a more appropriate distance computation such
as the geodesic one.
- Considering other tasks and activities to learn.
Finally, an interesting point is related to the false
positives given by the window model i.e. some ICPs
that do not exist in the dataset. As the creation and
placement of the ICPs is only the consequence of the
teacher’s decision, can these false positives (or part of
it), be in fact consistent ICPs that are useful to decom-
pose the task? The same question can be asked for the
false negatives, some of them indicating, perhaps, the
presence of useless ICPs in the dataset in terms of task
decomposition. These problems will be addressed in
future work.
REFERENCES
Adolf, J., K
´
an, P., Outram, B., Kaufmann, H., Dole
ˇ
zal, J.,
and Lhotsk
´
a, L. (2019). Juggling in vr: Advantages of
immersive virtual reality in juggling learning. VRST
’19: 25th ACM Symposium on Virtual Reality Soft-
ware and Technology.
Akinsola, J. E. T. (2017). Supervised machine learning
algorithms: Classification and comparison. Interna-
tional Journal of Computer Trends and Technology
(IJCTT), 48:128–138.
Baoxing, B. and Bo, L. (2018). Upper body motion recogni-
tion based on key frame and random forest regression.
Multimedia Tools and Applications, 79:5197–5212.
Borchani, H., Varando, G., Bielza, C., and Larranaga, P.
(2015). A survey on multi-output regression. Wiley
Interdisciplinary Reviews: Data Mining and Knowl-
edge Discovery, 5:216–233.
Bouville, R., Gouranton, V., Boggini, T., Nouviale, F., and
Arnaldi, B. (2015). # five: High-level components for
developing collaborative and interactive virtual envi-
ronments. In 2015 IEEE 8th Workshop on Software
Engineering and Architectures for Realtime Interac-
tive Systems (SEARIS), pages 33–40. IEEE.
Breiman, L. (2001). Random forests. Machine Learning,
45:5–32.
Brock, H. and Ohgi, Y. (2017). Assessing motion style er-
rors in ski jumping using inertial sensor devices. IEEE
Sensors Journal, 17(12):3794–3804.
Chiang, P.-Y., Chang, H.-Y., and Chang, Y.-J. (2018). Pot-
terygo: A virtual pottery making training system.
IEEE Comput. Graph. Appl., 38(2):74–88.
Claude, G., Gouranton, V., Berthelot, R. B., and Arnaldi, B.
(2014). Short paper:# seven, a sensor effector based
scenarios model for driving collaborative virtual envi-
ronment. In ICAT-EGVE, International Conference on
Artificial Reality and Telexistence, Eurographics Sym-
posium on Virtual Environments, pages 1–4.
D’Amato, V., Volta, E., Oneto, L., Volpe, G., Camurri, A.,
and Anguita, D. (2020). Understanding violin players’
skill level based on motion capture: a data-driven per-
spective. Cognitive Computation, 12(6):1356–1369.
de Morais, W. O. and Wickstr
¨
om, N. (2011). A serious
computer game to assist tai chi training for the elderly.
In 2011 IEEE 1st International Conference on Serious
Games and Applications for Health (SeGAH), pages
1–8.
Dimmel, J. and Bock, C. (2017). Handwaver: A gesture-
based virtual mathematical making environment. In
Proceedings of the 13th International Conference on
Technology in Mathematics Teaching.
Djadja., D., Hamon., L., and George., S. (2020). De-
sign of a motion-based evaluation process in any unity
3d simulation for human learning. In Proceedings
of the 15th International Joint Conference on Com-
puter Vision, Imaging and Computer Graphics The-
ory and Applications - GRAPP, pages 137–148. IN-
STICC, SciTePress.
Fazeli, H. R., Venkatesh, S. K., and Peng, Q. (2018). A vir-
tual environment for hand motion analysis. Procedia
CIRP, 78:127–132. 6th CIRP Global Web Conference
– Envisaging the future manufacturing, design, tech-
nologies and systems in innovation era (CIRPe 2018).
Giarmatzis, G., Zacharaki, E. I., and Moustakas, K. (2020).
Real-time prediction of joint forces by motion capture
and machine learning. Sensors.
H
¨
ulsmann, F., G
¨
opfert, J. P., Hammer, B., Kopp, S., and
Botsch, M. (2018). Classification of motor errors to
provide real-time feedback for sports coaching in vir-
tual reality — a case study in squats and tai chi pushes.
Computers & Graphics, 76:47–59.
Izonin, I., Tkachenko, R., Gregus, M., Khrystyna, Z., and
Lotoshynska, N. (2021). Input doubling method based
on svr with rbf kernel in clinical practice: Focus on
small data. Procedia Computer Science, 184:606–
613.
Jarchi, D., Pope, J., Lee, T. K., Tamjidi, L., Mirzaei, A., and
Sanei, S. (2018). A review on accelerometry-based
gait analysis and emerging clinical applications. IEEE
reviews in biomedical engineering, 11:177–194.
Jeanne, F., Thouvenin, I., and Lenglet, A. (2017). A study
on improving performance in gesture training through
visual guidance based on learners’ errors. In Proceed-
ings of the 23rd ACM Symposium on Virtual Reality
Software and Technology, VRST ’17, New York, NY,
USA. Association for Computing Machinery.
Jose, J., Unnikrishnan, R., Marshall, D., and Bhavani, R. R.
(2016). Haptics enhanced multi-tool virtual interfaces
for training carpentry skills. In 2016 International
Conference on Robotics and Automation for Humani-
tarian Applications (RAHA), pages 1–6. IEEE.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
50

Kacem, A., Hammal, Z., Daoudi, M., and Cohn, J. (2018).
Detecting depression severity by interpretable repre-
sentations of motion dynamics. In 13th IEEE Inter-
national Conference on Automatic Face and Gesture
Recognition, FG 2018, pages 739–745.
Kapur, A., Kapur, A., Virji-Babul, N., Tzanetakis, G., and
Driessen, P. (2005). Gesture-based affective comput-
ing on motion capture data. In International Confer-
ence on Affective Computing and Intelligent Interac-
tion, ACII, volume 3784, pages 1–7.
Kico, I. and Liarokapis, F. (2020). Investigating the learn-
ing process of folk dances using mobile augmented
reality. Applied Sciences, 10(2):599.
Kora, T., Soga, M., and Taki, H. (2015). Golf learning envi-
ronment enabling overlaid display of expert’s model
motion and learner’s motion using kinect. Proce-
dia Computer Science, 60:1559–1565. Knowledge-
Based and Intelligent Information & Engineering Sys-
tems 19th Annual Conference, KES-2015, Singapore,
September 2015 Proceedings.
Larboulette, C. and Gibet, S. (2015). A review of com-
putable expressive descriptors of human motion. In
Proceedings of the 2nd International Workshop on
Movement and Computing, MOCO ’15, page 21–28.
Association for Computing Machinery.
Le Naour, T., Hamon, L., and Bresciani, J.-P. (2019). Super-
imposing 3d virtual self + expert modeling for motor
learning: Application to the throw in american foot-
ball. Frontiers in ICT, 6:16.
L
´
ecuyer, F., Gouranton, V., Reuzeau, A., Gaugne, R., and
Arnaldi, B. (2020). Action sequencing in VR, a no-
code approach. LNCS Transactions on Computational
Science, pages 57–76.
Liu, J., Zheng, Y., Wang, K., Bian, Y., Gai, W., and Gao, D.
(2020). A real-time interactive tai chi learning system
based on vr and motion capture technology. Procedia
Computer Science, 174:712–719. 2019 International
Conference on Identification, Information and Knowl-
edge in the Internet of Things.
Moore, A. G., McMahan, R. P., Dong, H., and Ruozzi, N.
(2020). Extracting velocity-based user-tracking fea-
tures to predict learning gains in a virtual reality train-
ing application. In 2020 IEEE International Sym-
posium on Mixed and Augmented Reality (ISMAR),
pages 694–703.
Morel, M. (2017). Multidimensional time-series averag-
ing: Application to automatic and generic evaluation
of sport gestures. Theses, Universit
´
e Pierre et Marie
Curie - Paris VI.
Morel, M., Achard, C., Kulpa, R., and Dubuisson, S.
(2017). Automatic evaluation of sports motion: A
generic computation of spatial and temporal errors.
Image and Vision Computing, 64:67–78.
Naser, M. and Alavi, A. (2020). Insights into performance
fitness and error metrics for machine learning. Re-
search Gate.
Park, D.-S., Lee, D.-G., Lee, K., and Lee, G. (2017). Ef-
fects of virtual reality training using xbox kinect on
motor function in stroke survivors: A preliminary
study. Journal of Stroke and Cerebrovascular Dis-
eases, 26(10):2313–2319.
Pilati, F., Faccio, M., Gamberi, M., and Regattieri, A.
(2020). Learning manual assembly through real-time
motion capture for operator training with augmented
reality. Procedia Manufacturing, 45:189–195. Learn-
ing Factories across the value chain – from innovation
to service – The 10th Conference on Learning Facto-
ries 2020.
Rold
´
an, J. J., Crespo, E., Mart
´
ın-Barrio, A., Pe
˜
na-Tapia,
E., and Barrientos, A. (2019). A training system for
industry 4.0 operators in complex assemblies based
on virtual reality and process mining. Robotics and
computer-integrated manufacturing, 59:305–316.
Savitzky, A. and Golay, M. (1964). Smoothing and differen-
tiation of data by simplified least squares procedures.
Analytical Chemistry, 36:1627–1639.
Schafer, R. W. (2011). What is a savitzky-golay filter?
IEEE Signal Processing Magazine, 28:111 – 117.
Sror, L., Vered, M., Treger, I., Levy-Tzedek, S., Levin,
M. F., and Berman, S. (2019). A virtual reality-based
training system for error-augmented treatment in pa-
tients with stroke. In 2019 International Conference
on Virtual Rehabilitation (ICVR), pages 1–2.
Swee, S. K., You, L. Z., Hang, B. W. W., and Kiang, D. K. T.
(2017). Development of rehabilitation system using
virtual reality. In 2017 International Conference on
Robotics, Automation and Sciences (ICORAS), pages
1–6.
Thomas, S., G.N., P., and Kirat, P. (2017). Prediction of
peak ground acceleration using e-svr, v-svr and ls-
svr algorithm. Geomatics Natural Hazards and Risk,
8:177–193.
Vabalas, A., Gowen, E., Poliakoff, E., and Casson, A. J.
(2020). Applying machine learning to kinematic and
eye movement features of a movement imitation task
to predict autism diagnosis. Scientific Reports.
Wei, W., Lu, Y., Printz, C. D., and Dey, S. (2015). Motion
data alignment and real-time guidance in cloud-based
virtual training system. In Proceedings of the Con-
ference on Wireless Health, WH ’15, New York, NY,
USA. Association for Computing Machinery.
Winkler-Schwartz, A., Yilmaz, R., Mirchi, N., Bissonnette,
V., Ledwos, N., Siyar, S., Azarnoush, H., Karlik, B.,
and Del Maestro, R. (2019). Machine Learning Identi-
fication of Surgical and Operative Factors Associated
With Surgical Expertise in Virtual Reality Simulation.
JAMA Network Open, 2(8):e198363–e198363.
Automatic Prediction of 3D Checkpoints for Technical Gesture Learning in Virtual Environments
51
