
Severity of Catastrophic Forgetting in Object Detection for Autonomous
Driving
Christian Witte
1,2
, Ren
´
e Schuster
3
, Syed Saqib Bukhari
1
, Patrick Trampert
1
, Didier Stricker
2,3
and Georg Schneider
1
1
ZF Friedrichshafen AG, Saarbr
¨
ucken, Germany
2
University of Kaiserlautern - TUK, Kaiserslautern, Germany
3
DFKI - German Research Center for Artificial Intelligence, Kaiserslautern, Germany
Keywords:
Continual Learning, Catastrophic Forgetting, Object Detection, Autonomous Driving.
Abstract:
Incorporating unseen data in pre-trained neural networks remains a challenging endeavor, as complete retrain-
ing is often impracticable. Yet, training the networks sequentially on data with different distributions can
lead to performance degradation for previously learned data, known as catastrophic forgetting. The sequential
training paradigm and the mitigation of catastrophic forgetting are subject to Continual Learning (CL). The
phenomenon of forgetting poses a challenge for applications with changing distributions and prediction objec-
tives, including Autonomous Driving (AD).
Our work aims to illustrate the severity of catastrophic forgetting for object detection for class- and domain-
incremental learning. We propose four hypotheses, as we investigate the impact of the ordering of sequential
increments and the underlying data distribution of AD datasets. Further, the influence of different object detec-
tion architectures is examined. The results of our empirical study highlight the major effects of forgetting for
class-incremental learning. Moreover, we show that domain-incremental learning suffers less from forgetting
but is highly dependent on the design of the experiments and choice of architecture.
1 INTRODUCTION
Training a neural network sequentially on new data
results in a degradation of performance on previously
learned knowledge, which is called catastrophic infer-
ence or catastrophic forgetting (McCloskey and Co-
hen, 1989). As the real world is non-stationary, au-
tonomous systems are exposed to ever-changing data
distributions. For Autonomous Driving (AD), the dis-
tribution change is induced by a variation in the visual
domain, e.g., weather, time, country, or the appear-
ance of new, unknown classes, e.g., drones or electric
scooters. Incorporating knowledge of new domains
and new classes into a Neural Network (NN) is a non-
trivial task. Common practice is to extend the previ-
ous dataset with data samples containing new classes
or from different domains and to retrain the NN from
scratch. As storing previous data is not desired and an
entire retraining results in a high computational over-
head, Continual Learning (CL) aims to alleviate the
effects of catastrophic forgetting for sequential train-
ing. Comparing current CL approaches is difficult due
to various assumptions, different settings, and down-
stream tasks, which highly influence the results.
We investigate the effects of different realistic CL
scenarios with respect to catastrophic forgetting for
object detection, which is an essential element for
AD. Guided by four proposed hypotheses, we eval-
uate how the aspects data distribution, order of se-
quential tasks, and architecture choice have an impact
on the performance of object detection. We compare
domain- and class-incremental learning and conclude
with suggestions for the evaluation of CL methods.
2 CONTINUAL LEARNING
SCENARIOS
Continual Learning, also known as Incremental
Learning, describes an iterative learning procedure
composed of sequential tasks to be learned, which ei-
ther differ in the data distribution or the prediction
objective. As only data for the current task, also
referred to as increment, is available for the current
training step, weights important to previous tasks are
altered. Changing these weights results in the effect
of catastrophic forgetting. We can formally define
262
Witte, C., Schuster, R., Bukhar i, S., Trampert, P., Stricker, D. and Schneider, G.
Severity of Catastrophic Forgetting in Object Detection for Autonomous Driving.
DOI: 10.5220/0011634500003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 262-269
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

the task T
t
= (X
t
, Y
t
) as t-th incremental task in the
learning procedure with the set of input samples X
t
=
{x
i
}
1≤i≤N
t
and output targets Y
t
= {y
i
}
1≤i≤N
t
(Hsu
et al., 2018). The sequence of tasks {T
1
, T
2
, ..., T
K
}
describes the entire CL scenario. CL scenarios can be
categorized based on the incremental task to be solved
(Hsu et al., 2018; Van de Ven and Tolias, 2019). Let
X
s
, X
t
be the input data for two tasks T
s
, T
t
, ∀s, t ∈
K, s 6= t and Y
s
, Y
t
are the sets of annotations. Class-
incremental Learning describes learning an exclu-
sive subset of classes for each subsequent task. For
classification tasks, this implies Y
s
∩ Y
t
=
/
0 and the
setting is class instance-injective, which means each
input sample corresponds to only one task. However,
the downstream-task object detection demands multi-
ple class label instances per data sample and addition-
ally predicts not only class annotations, but also spa-
tial information of the object. Hence, only the sets of
class annotations for different tasks are disjoint. The
differing marginal distributions of target annotations,
i.e., P(Y
s
) 6= P(Y
t
), imply consequently a different dis-
tribution of the input data P(X
s
) 6= P(X
t
).
Domain-incremental Learning considers the CL
scenario, in which the output targets do not change,
while the domain shift induces a change in the input
data distribution (Pan and Yang, 2009). The elements
of the target space, i.e., all possible annotations to be
learned, stay the same for consecutive tasks (Y
s
= Y
t
).
For each task in Task-incremental Learning, the
set of output labels is different, i.e., output spaces are
disjoint (Hsu et al., 2018). Task-incremental learn-
ing settings require a task identifier, which is an ad-
ditional ground truth annotation for the current task.
Class- and domain-incremental learning scenarios for
AD are visualized in Figure 1.
3 RELATED WORK
3.1 Continual Learning
Previous work on CL primarily focused on differ-
ent techniques to alleviate the effects of catastrophic
forgetting. Delange et al. (2021) proposed the cate-
gorization into replay, regularization-based, and pa-
rameter isolation methods. Replay methods aim
to mitigate forgetting by revisiting previous knowl-
edge explicitly (Lopez-Paz and Ranzato, 2017; Re-
buffi et al., 2017) or inducing self-generated data dur-
ing training (Shin et al., 2017). Constraining or pe-
nalizing updates of model parameters is the focus
of regularization-based methods (Kirkpatrick et al.,
2017; Zenke et al., 2017). Algorithms that employ
a dynamic expansion of NNs (Rusu et al., 2016) or
assign different model parameters to each task (Serra
et al., 2018) are referred to as parameter isolation
methods. While most approaches focus on classi-
fication, CL for object detection is a less explored
field of research. One type of mitigation strategy is
knowledge distillation (Shmelkov et al., 2017; Peng
et al., 2020, 2021). Another line of work analyzed
the diverse influences on CL in various settings. Far-
quhar and Gal (2018) assessed the experimental setup
for CL. They claimed that the evaluation is biased,
so they define fundamental desiderata for the empiri-
cal evaluation of CL. Among them is the evaluation
without test-time task labels, which are commonly
used to indicate the task to be solved. Consequently,
we neglect task-incremental learning in this empirical
study. Recently, Mirzadeh et al. (2022) performed an
in-depth analysis of the significance of the architec-
ture for classification in CL. They show that each ar-
chitecture has an individual trade-off between stabil-
ity and plasticity (Mirzadeh et al., 2022; Pham et al.,
2022). Ramasesh et al. (2021) show in their empirical
study that pre-trained ResNet (He et al., 2016) and
Transformer (Dosovitskiy et al., 2021) architectures
are more robust in terms of forgetting than randomly
initialized models for CL.
To the best of our knowledge, an empirical study
concerning the influence of catastrophic forgetting on
object detection has not been performed, yet.
3.2 Object Detection
Faster-RCNN (Ren et al., 2015) is a widely used two-
stage detection architecture, which employs a Convo-
lutional Neural Network (CNN) for feature extraction
and for region proposal generation. Recently, the first
Vision Transformer (ViT) (Dosovitskiy et al., 2021)
has shown competitive performance with manage-
able computational resources. The ViT was improved
upon by computing attention in shifted windows,
called Swin-Transformer (Liu et al., 2021). Car-
ion et al. (2020) introduced Detection Transformer
(DETR), the first transformer-based end-to-end archi-
tecture for detection. As this approach suffers from
slow convergence and low performance on small ob-
jects due to the limited spatial resolution, it was im-
proved by introducing deformable attention modules.
Deformable DETR (DDETR) (Zhu et al., 2021) mit-
igates these effects by computing attention only on a
small set of sampling points. Tian et al. (2019) intro-
duced FCOS (Fully Convolutional One-Stage Object
Detector), an anchor-free and proposal-free one-stage
detector.
Severity of Catastrophic Forgetting in Object Detection for Autonomous Driving
263

Task T
1
Task T
2
Task T
3
(a) Class-incremental learning (b) Domain-incremental learning
Figure 1: Incremental learning for object detection is visualized for the dataset BDD100K (Yu et al., 2020). Each image
corresponds to one task. In the presented class-incremental learning setting (a), the classes Car, Truck, and Pedestrian are
learned sequentially. For the domain-incremental scenario (b), the tasks T
1
, T
2
, T
3
differ in their domain, as each task contains
only images at Daytime, Dawn/Dusk, or Night, respectively.
4 EXPERIMENTAL SETUP
As clear guidance for the experiments, first, we de-
fine four hypotheses to be investigated to analyze the
effects of catastrophic forgetting. Then, we introduce
three datasets and the relevant CL scenarios. Lastly,
we examine relevant metrics and provide implemen-
tation details for our experiments.
4.1 Hypotheses
To analyze the effects and influence of catastrophic
forgetting for 2D bounding box detection, we de-
signed and performed various experiments to inves-
tigate the following hypotheses:
H1. The order of tasks influences the forgetting.
H2. The data distribution of the input influences the
severity of forgetting.
H3. The architecture of the detector has an influence
on the forgetting.
H4. Class-incremental learning leads to more se-
vere forgetting compared to domain-incremental
learning.
4.2 Datasets
This investigation considers object detection for AD
datasets. To obtain a high degree in diversity, we
62.6%
25.0%
11.6%
Citystreet
Highway
Residential
Parking Lot (0.5%)
Tunnel (0.2%)
Gas Station (0.03%)
Figure 2: Distribution of the image occurrences for the do-
main Scene for BDD100K.
consider the datasets BDD100K (Yu et al., 2020) and
SODA10M (Han et al., 2021).
BDD100K was released in 2020 to embrace real-
world complexity by incorporating a high diversity
geographically and environmentally. It was recorded
in the USA and it includes scene type information for
each image, such as citystreets, highways, or residen-
tial areas, as well as the time of day annotation. Fur-
ther, weather condition information, e.g., sunny, over-
cast, rainy, etc., is provided.
SODA10M is a large-scale autonomous driving
dataset with 10 million unlabeled and 20,000 labeled
images. It provides annotations for the domains
weather, scene, and time of day. The training dataset
contains images from one domain, while the valida-
tion and testing datasets include data from all do-
mains. To investigate hypothesis H2, i.e., that the dis-
tribution of domains influences the incremental train-
ing, the scene domain distribution is visualized for
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
264

BDD100K in Figure 2. We must acknowledge, that
the class and domain distributions are vastly unbal-
anced.
4.3 Continual Learning Scenarios
As described in Section 2, there are three different
CL settings. Since task-incremental learning repre-
sents an artificial scenario due to the required task-
identifier, the focus of this study lies on class- and
domain-incremental learning.
We investigate the influence of several class-
incremental learning scenarios for object detection
and we perform all experiments with the assumption
that instances of previous or future classes may also
appear at any step and that their labels are only avail-
able at their respective task increment. This means
that only annotations for classes in the current task
increment, e.g., vehicles, are provided. Previous or
future class instances that appear also in the current
increment, e.g., pedestrians co-occurring with vehi-
cles, are not annotated.
As commonly done in class-incremental learning
(Shmelkov et al., 2017), we investigate setups with
various classes in the first increment and different
numbers of classes added per increment. These se-
tups can be denoted by a tuple, e.g., 5-5 or 9-1, where
the first integer of the tuple represents the number of
initial classes trained in the first increment T
1
and the
second integer represents the number of classes added
per increment.
To evaluate domain-incremental learning, we use
the available domain information of the datasets
BDD100K and SODA10M. For each CL scenario,
we perform sequential training on the incremental
datasets, also referred to as na
¨
ıve fine-tuning. After
training on a specific increment, the performance of
the network is evaluated for the current task. The eval-
uation takes into account only the previous and cur-
rent tasks for class-incremental learning and all tasks
for domain-incremental learning.
4.4 Metrics
The mean Average Precision (mAP) is a common per-
formance metric for object detection. It is computed
for all known classes for a fixed validation set. The
performance itself does not yield information about
the forgetting in CL. To obtain a notion of the in-
fluence one increment has on the previous or the
following increment, the metrics Backward Transfer
(BWT) and Forward Transfer (FWT) were introduced
(Lopez-Paz and Ranzato, 2017).
With K tasks to be learned, the model is evaluated
on all K tasks after the training of each task T
i
. Then,
a matrix P ∈ R
K×K
is obtained with p
i, j
as mAP for
task T
j
after being trained on task T
i
and all previous
tasks T
1
, ..., T
i−1
. A baseline vector
¯
b is computed pre-
viously to the training by evaluating the performance
of the initial model on all tasks. The above mentioned
metrics are then computed as follows:
BWT =
1
K − 1
K−1
∑
i=1
p
K,i
− p
i,i
(1)
FW T =
1
K − 1
K
∑
i=2
p
i−1,i
−
¯
b
i
(2)
The BWT denotes a measure for the average differ-
ence between the initial performance after training
on T
i
and the final performance after training on all
tasks, i.e., after T
K
. For positive values of BWT, the
model is gaining performance compared to the ini-
tial task, while negative BWT values imply that the
network has forgotten previous knowledge. The im-
pact that the learning of task T
i
has on the subse-
quent task T
i+1
is described by FWT. Positive values
of FWT indicate that the acquired knowledge on task
T
i
transfers well to the subsequent task. If the FWT
is negative, the training of task T
i
worsens the per-
formance of the model for task T
i+1
compared to the
initial baseline
¯
b
i
. As the initial performance is eval-
uated after the initialization of the network for ob-
ject detection, significant values for
¯
b are not to be
expected. Even for pre-trained backbone networks,
we employ models with randomly initialized heads
for object detection. Consequently, negative values
seldom occur. We introduce BWT(%) as the BWT
normalized by
1
K−1
∑
K−1
i=1
P
K,i
to obtain a relative no-
tion of the forgetting. Similar to the average accu-
racy (Lopez-Paz and Ranzato, 2017), we introduce
the performance metric avg. mAP, which denotes an
average over the mAPs after training on all K tasks,
i.e., avg. mAP =
1
K
∑
K
i=1
P
K,i
. The gap between avg.
mAP for incremental learning and mAP for joint, i.e.,
non-incremental, training describes the performance
difference due to sequential training. We refer to this
difference as overall forgetting.
4.5 Implementation Details
To quantify the influence of the architecture, the intro-
duced state-of-the-art detection networks from Sec-
tion 3.2 are evaluated. Faster-RCNN (Ren et al.,
2015) with a ResNet50 (He et al., 2016) backbone is
used as the default architecture for all experiments,
if not otherwise stated. For our CL scenarios, the
Severity of Catastrophic Forgetting in Object Detection for Autonomous Driving
265
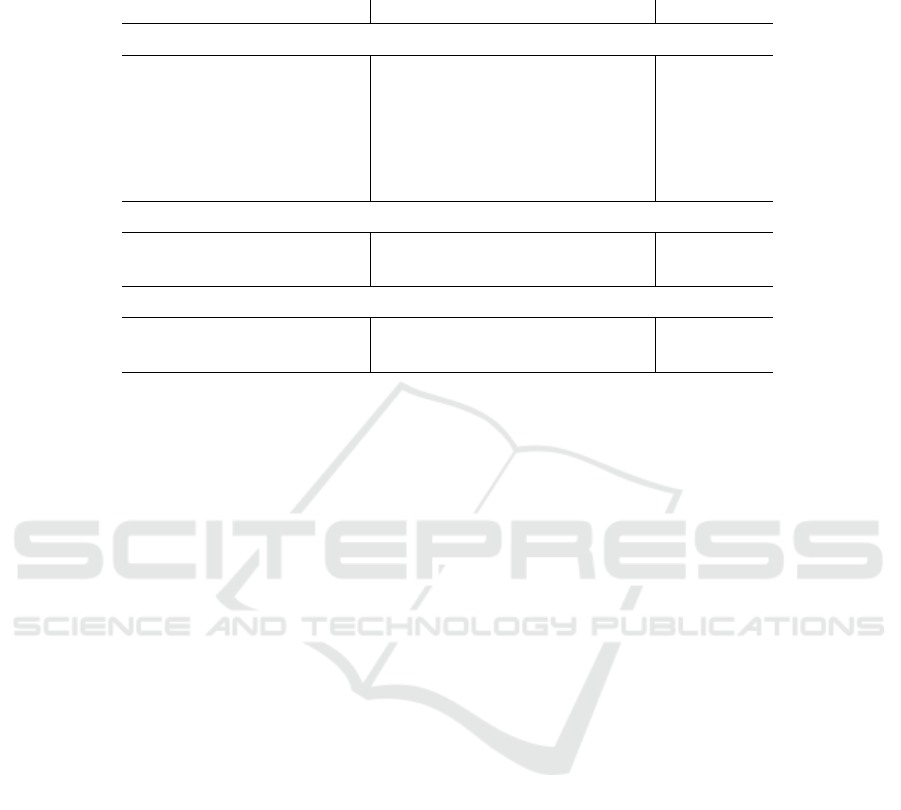
Table 1: Influence of the order of tasks for domain-incremental learning on BDD100K and for the detector architecture Faster-
RCNN. For the available domains, the obtained performance (avg. mAP), the relative forgetting (BWT(%)) and the ability to
generalize to the next domain (FWT) are presented. Each row corresponds to a different sequence of tasks.
Order avg. mAP BWT(%) FWT mAP (joint)
Time of Day (Day, Night, Dawn/Dusk)
Day → Dawn → Night 0.263 -10.5% 0.253
0.304
Day → Night → Dawn † 0.228 -15.0% 0.209
Dawn → Day → Night 0.241 -5.7% 0.21
Dawn → Night → Day ‡ 0.264 11.5% 0.189
Night → Day → Dawn 0.263 -10.2% 0.263
Night → Dawn → Day 0.268 7.2% 0.223
Scene (Citystreet, Highway, Residential, ...)
Descending by occurrences 0.244 -18.3% 0.267
0.304
Ascending by occurrences 0.286 176% 0.085
Weather (Clear, Overcast, Snowy, Rainy, ...)
Descending by occurrences 0.229 -7.9% 0.238
0.304
Ascending by occurrences 0.250 35.8% 0.166
†: Descending by occurrences ‡: Ascending by occurrences
dataset of each task is constructed by filtering the
original dataset according to the domain or class in-
formation. For class-incremental training, the origi-
nal validation dataset is preserved, if available. The
domain-incremental datasets are each split randomly
into training and validation by the ratio of 80:20. For
SODA10M, both training and validation datasets are
merged into one and then split randomly into training
and validation datasets. We employ the CL frame-
work Avalanche (Lomonaco et al., 2021) and utilize
MMDetection (Chen et al., 2019) for the object de-
tection architectures. For all experiments, we only
use random flipping as augmentation and train on the
number of epochs with learning rate scheduling as
proposed by the framework for each network.
5 RESULTS & DISCUSSION
For both datasets, experiments are conducted with dif-
ferent orderings of domains (H1). The data distri-
butions are taken into account for the evaluation and
possible sources of diverse effects are outlined (H2).
The network architectures are subject to the analysis
by comparing their performance for identical scenar-
ios (H3). The first three hypotheses are analyzed for
domain-incremental learning. Lastly, we examine the
severity of forgetting for class-incremental learning
and compare the results to domain-incremental learn-
ing (H4).
5.1 Hypothesis H1 – The Order of Tasks
Influences the Forgetting
Table 1 depicts the results for domain-incremental
learning. The overall forgetting is evident for all do-
mains, as the mAP is evidently below the performance
of non-incremental training. Major performance dif-
ferences are apparent for the same domain if the or-
der of increments is altered. For the Time of Day do-
main, setups with presumably different strengths of
domain gaps were analyzed, e.g., the difference in
data distribution of subsequent tasks is assumed to
be lower for the sequence Day → Dawn than it is
for Day → Night. The results show that the ordering
with respect to the number of occurrences has a higher
impact on the backward transfer than the strength of
the domain gap as the descending/ascending case has
the lowest/highest forgetting. However, consecutive
tasks with low domain gap strength, e.g., Day →
Dawn, and simultaneously descending occurrences
have high FWT values, thus, generalize well to new
data. Due to the intractability of all permutations of
domains, we determined the order of the increments
for the domains Scene and Weather only by the im-
age occurrences in descending and ascending order.
For both datasets, the relative BWT and, thus, the for-
getting is lowest in the ascending case, while the de-
scending order achieves the highest FWT.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
266
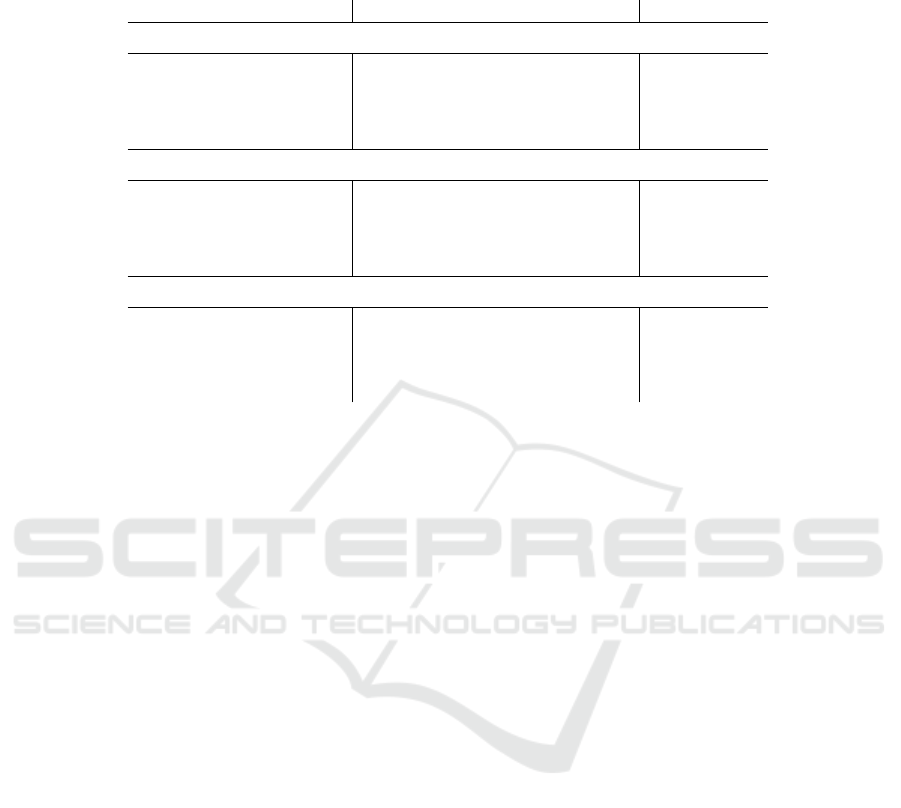
Table 2: Performance overview of different architectures for SODA10M for domain-incremental training. The obtained
performance (avg. mAP), the forgetting (BWT(%)) and the ability to generalize to the next domain (FWT) are presented. The
joint training serves as upper baseline as all data is available at once without sequential training.
Architecture avg. mAP BWT(%) FWT mAP (joint)
Time of Day (Day → Night)
Faster-RCNN (ResNet) 0.434 -19.6% 0.255 0.446
Faster-RCNN (Swin) 0.452 -14.8% 0.304 0.475
FCOS (ResNet) 0.376 -27.1% 0.205 0.397
DDETR (ResNet) 0.416 -25.4% 0.286 0.479
Scene (Citystreet → Highway → Countryroad)
Faster-RCNN (ResNet) 0.428 -10.9% 0.366 0.446
Faster-RCNN (Swin) 0.426 -9.8% 0.331 0.475
FCOS (ResNet) 0.333 -20.2% 0.283 0.397
DDETR (ResNet) 0.331 -20.9% 0.271 0.479
Weather (Clear → Overcast → Rainy)
Faster-RCNN (ResNet) 0.431 -15.2% 0.417 0.446
Faster-RCNN (Swin) 0.448 -8.5% 0.415 0.475
FCOS (ResNet) 0.365 -20.9% 0.353 0.397
DDETR (ResNet) 0.384 -27.0% 0.411 0.479
5.2 Hypothesis H2 – The Data
Distribution of the Input Influences
the Severity of Forgetting
As previously shown, the order of tasks influences the
final performance of the NN on the validation data.
To obtain a fair comparison, the data from underrep-
resented domains was not artificially up-sampled. An
intuition for the higher performance for the ascend-
ing order is that more data becomes available in sub-
sequent increments. More data increases the perfor-
mance of the network also on the previous domains,
as the domain gap becomes negligible compared to
the performance gain due to the higher amount of
data. It can be observed that networks almost exclu-
sively obtain the highest mAPs for the current incre-
ment and, that the final increment can have a high
impact on the overall performance. For the ascend-
ing case, the most common domain is trained last,
therefore, the NN is fine-tuned on this data and we
obtain better overall performance for ascending or-
der. Vice versa, for scenarios in descending order of
occurrences, the last increments contain fewer sam-
ples. Consequently, it results in inferior overall per-
formance and increased forgetting.
One further influence is that the domain splits
in SODA10M are not as granular as they are in
BDD100K. Therefore, the domain gap within each
increment for SODA10M is assumed to be more ex-
treme. Another aspect is the different sizes of the
datasets. BDD100K consists of 100,000 annotated
images, while SODA10M provides 10,000 data sam-
ples. Hence, we assume that overfitting to one domain
is less likely and the vulnerability to forgetting is de-
creased.
5.3 Hypothesis H3 – The Architecture
of the Detector Has an Influence on
the Forgetting
To evaluate the influence of the NN architecture
on incremental learning, all introduced architectures
were trained and evaluated on the presented datasets.
For domain-incremental learning, the performance of
each architecture is shown in Table 2 for SODA10M.
The architecture choice influences the severity of
forgetting and the magnitude of the FWT. Faster-
RCNN shows consistently the best performance after
the incremental training with the least amount of for-
getting. Further, the usage of the Swin-Transformer
as backbone shows a higher avg. mAPs and lessens
forgetting compared to the ResNet backbone. The im-
proved performance can be due to presumably bet-
ter representations. Also, it can be explained by the
higher number of network parameters. FCOS shows
low overall performance with high forgetting, as de-
picted in Table 2. Moreover, it has low FWT val-
ues for all domains and datasets, which can indicate
a poor generalization to other domains. With some
exceptions, DDETR is most affected by incremental
learning with respect to the introduced metrics as the
forgetting appears to be most severe for this architec-
ture.
Severity of Catastrophic Forgetting in Object Detection for Autonomous Driving
267

Table 3: Class-incremental learning with 5-5 and 9-1 increments for BDD100K and Faster-RCNN. Each row corresponds to
one task-increment, while each column represents the performance for the given class.
Inc.
AP
Car Truck Bus Mot.-
cycle
Train Rider Bi-
cycle
Tr.
Sign
Tr.
Light
Pedes-
trian
mAP
5-5
#1 0.499 0.422 0.44 0.173 0.00 0.307
#2 0.00 0.00 0.00 0.00 0.00 0.331 0.234 0.224 0.372 0.233 0.14
9-1
#1 0.497 0.436 0.445 0.195 0.00 0.196 0.22 0.368 0.223 0.287
#2 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.333 0.033
5.4 Hypothesis H4 – Class-Incremental
Learning Leads to More Severe
Forgetting Compared to
Domain-Incremental Learning
Catastrophic forgetting is evident for class-
incremental learning, as depicted in Table 3. The
performance is provided as the Average Precision
(AP) per class. For all analyzed settings, knowledge
of previous classes is directly forgotten once the NN
is trained on the subsequent task, as the network fails
to detect instances of previous classes.
For class-incremental learning, in each increment
only annotations for the current classes are present,
and hence no labels for other classes. The NN is
trained to detect previous classes, thus, it will output
predictions of the previous classes while training on
the new data. Due to the missing label information
of previous classes, predictions for those classes are
treated as false positives in the loss computation. This
might lead to the intuition that the network is forced
to actively forget previous classes. We assessed this
assumption by utilizing the ground-truth bounding
box information of the unknown instances (of classes
from a previous/future increment) of the training data
to disregard the corresponding losses for the false
positives during training. Catastrophic forgetting
is neither mitigated nor alleviated by incorporating
previous predictions during training. Thus, punishing
false positive predictions of the network appears to
have only a subordinate influence on forgetting.
6 CONCLUSION
Analyzing the four hypotheses demonstrates that the
evaluation of CL highly depends on the chosen sce-
nario. Firstly, domain-incremental scenarios show
signs of forgetting, yet the effect of catastrophic for-
getting is severe for class-incremental learning. We
hypothesize that active forgetting due to false posi-
tives has a subsidiary role. As the AD data is con-
siderably unbalanced, the order must be accounted
for when performing CL due to different extents of
domain gaps and due to rare domains with limited
data. The detection network Faster-RCNN with its
task-agnostic RPN is least affected by catastrophic
forgetting. Using a transformer as a backbone further
increases the robustness.
With the findings of this work, we expect the results
for the evaluation of future CL methods to become
more trustworthy, reliable, and interpretable. We en-
courage that future work on CL should acknowledge
these results by incorporating random orderings and
more realistic scenarios to achieve better comparabil-
ity between methods. Reducing the effects of forget-
ting is subject to another line of work (Delange et al.,
2021). Our study emphasizes the importance of miti-
gation strategies for CL for object detection and mo-
tivates future research in this direction.
ACKNOWLEDGEMENTS
The research leading to these results is funded by the
German Federal Ministry for Economic Affairs and
Climate Action” within the project “KI Delta Learn-
ing“ (F
¨
orderkennzeichen 19A19013H). The authors
would like to thank the consortium for the successful
cooperation.
REFERENCES
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European Conference on
Computer Vision.
Chen, K., Wang, J., Pang, J., Cao, Y., Xiong, Y., Li, X.,
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
268

Sun, S., et al. (2019). Mmdetection: Open mm-
lab detection toolbox and benchmark. arXiv preprint
arXiv:1906.07155.
Delange, M., Aljundi, R., Masana, M., Parisot, S., Jia,
X., Leonardis, A., Slabaugh, G., and Tuytelaars, T.
(2021). A continual learning survey: Defying forget-
ting in classification tasks. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., et al.
(2021). An image is worth 16x16 words: Transform-
ers for image recognition at scale. In International
Conference on Learning Representations.
Farquhar, S. and Gal, Y. (2018). Towards robust
evaluations of continual learning. arXiv preprint
arXiv:1805.09733.
Han, J., Liang, X., Xu, H., Chen, K., Hong, L., Mao, J., Ye,
C., Zhang, W., Li, Z., Liang, X., and Xu, C. (2021).
Soda10m: A large-scale 2d self/semi-supervised ob-
ject detection dataset for autonomous driving.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition.
Hsu, Y.-C., Liu, Y.-C., Ramasamy, A., and Kira, Z. (2018).
Re-evaluating continual learning scenarios: A catego-
rization and case for strong baselines. arXiv preprint
arXiv:1810.12488.
Kirkpatrick, J., Pascanu, R., Rabinowitz, N., Veness, J.,
Desjardins, G., Rusu, A., Milan, K., et al. (2017).
Overcoming catastrophic forgetting in neural net-
works. Proceedings of the National Academy of Sci-
ences.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision.
Lomonaco, V., Pellegrini, L., Cossu, A., Carta, A., Graf-
fieti, G., Hayes, T. L., Lange, M. D., et al. (2021).
Avalanche: an end-to-end library for continual learn-
ing. In Proceedings of IEEE Conference on Computer
Vision and Pattern Recognition.
Lopez-Paz, D. and Ranzato, M. (2017). Gradient episodic
memory for continual learning. Advances in Neural
Information Processing Systems.
McCloskey, M. and Cohen, N. J. (1989). Catastrophic in-
terference in connectionist networks: The sequential
learning problem. In Psychology of Learning and Mo-
tivation.
Mirzadeh, S. I., Chaudhry, A., Yin, D., Nguyen, T., Pas-
canu, R., Gorur, D., and Farajtabar, M. (2022). Archi-
tecture matters in continual learning. arXiv preprint
arXiv:2202.00275.
Pan, S. J. and Yang, Q. (2009). A survey on transfer learn-
ing. IEEE Transactions on Knowledge and Data En-
gineering.
Peng, C., Zhao, K., and Lovell, B. C. (2020). Faster ilod: In-
cremental learning for object detectors based on faster
rcnn. Pattern Recognition Letters.
Peng, C., Zhao, K., Maksoud, S., Li, M., and Lovell, B. C.
(2021). Sid: Incremental learning for anchor-free ob-
ject detection via selective and inter-related distilla-
tion. Computer Vision and Image Understanding.
Pham, Q., Liu, C., and Hoi, S. (2022). Continual normaliza-
tion: Rethinking batch normalization for online con-
tinual learning. arXiv preprint arXiv:2203.16102.
Ramasesh, V. V., Lewkowycz, A., and Dyer, E. (2021). Ef-
fect of scale on catastrophic forgetting in neural net-
works. In International Conference on Learning Rep-
resentations.
Rebuffi, S.-A., Kolesnikov, A., Sperl, G., and Lampert,
C. H. (2017). icarl: Incremental classifier and rep-
resentation learning. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in Neural Information
Processing Systems.
Rusu, A. A., Rabinowitz, N. C., Desjardins, G., Soyer,
H., Kirkpatrick, J., Kavukcuoglu, K., Pascanu, R.,
and Hadsell, R. (2016). Progressive neural networks.
arXiv preprint arXiv:1606.04671.
Serra, J., Suris, D., Miron, M., and Karatzoglou, A. (2018).
Overcoming catastrophic forgetting with hard atten-
tion to the task. In International Conference on Ma-
chine Learning. PMLR.
Shin, H., Lee, J. K., Kim, J., and Kim, J. (2017). Contin-
ual learning with deep generative replay. Advances in
Neural Information Processing Systems.
Shmelkov, K., Schmid, C., and Alahari, K. (2017). In-
cremental learning of object detectors without catas-
trophic forgetting. In Proceedings of the IEEE/CVF
International Conference on Computer Vision.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). Fcos: Fully
convolutional one-stage object detection. In Proceed-
ings of the IEEE/CVF International Conference on
Computer Vision.
Van de Ven, G. M. and Tolias, A. S. (2019). Three
scenarios for continual learning. arXiv preprint
arXiv:1904.07734.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F.,
Madhavan, V., and Darrell, T. (2020). Bdd100k: A
diverse driving dataset for heterogeneous multitask
learning. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition.
Zenke, F., Poole, B., and Ganguli, S. (2017). Continual
learning through synaptic intelligence. In Interna-
tional Conference on Machine Learning.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2021).
Deformable detr: Deformable transformers for end-
to-end object detection. International Conference on
Learning Representations.
Severity of Catastrophic Forgetting in Object Detection for Autonomous Driving
269
