Model Fitting on Noisy Images from an Acoustofluidic Micro-Cavity for
Particle Density Measurement
Lucas M. Massa
1
, Tiago F. Vieira
1 a
, Allan de M. Martins
2 b
,
´
Icaro B. Q. de Ara
´
ujo
1 c
,
Glauber T. Silva
3
and Harrisson D. A. Santos
3
1
Institute of Computing, Federal University of Alagoas, Lourival Melo Mota Av., Macei
´
o, Brazil
2
Department of Electrical Engineering, Federal University of Rio Grande do Norte, Natal, Brazil
3
Physics Institute, Federal University of Alagoas, Macei
´
o, Brazil
fi
Keywords:
Particle Density Estimation, Genetic Algorithm, Gradient Descent, 2D Gaussian Fitting, Acoustofluidics.
Abstract:
We use a 3D printed device to measure the density of a micro-particle with acoustofluidics, which consists in
using sound waves to trap particles in free space. Initially, the particle is trapped in the microscope’s focal
plane (no blur). Then the transducers are shut off and the particle falls inside the fluid, increasing its diameter
due to defocus caused by the distance to the lens. This increase in diameter along time provides its velocity,
which can, in turn, be used to compute its density. To manually annotate the diameter in the recorded images
is a tedious task and is prone to errors. That happens due to the high noise present in the images, specially
in the last frames where the defocus is high. Because of that, we use a 2D Gaussian model fitting process to
estimate the particle diameter throughout different depth frames. To find the diameters, we initially perform
the Gaussian parameters fit with Genetic Algorithm in each frame of the recorded particle trajectory to avoid
local minima. Then we refine the fit with Gradient Descent using Tensorflow in order to compensate for
any randomness present in the fit of the Genetic Algorithm. We validate the method by retrieving a known
particle’s density with acceptable performance.
1 INTRODUCTION
Separating particles of interest from complex mix-
tures is an important procedure done in many fields
such as biology (Fan et al., 2022) and medicine (Li
et al., 2015). Recently, acoustofluidic, which consists
in using sound waves propagating through some fluid
medium, has been used in areas like clinical diagnos-
tics (Wang et al., 2021) and therapeutics (Bose et al.,
2015) due to its capability of trapping particles having
specific physical characteristics. By observing iso-
lated particles or conglomerates (colloids), one can
confirm the occurrence of specific reactions and de-
termine whether a given pathogen is present in a body
fluid sample using a microscope, for instance.
Traditionally, several techniques have been used
to separate particles, such as those based on cen-
trifuges, which is time-consuming, can cause substan-
tial material loss and alter cell functions (Fan et al.,
2022). In contrast, with a carefully designed acous-
a
https://orcid.org/0000-0002-5202-2477
b
https://orcid.org/0000-0002-9486-4509
c
https://orcid.org/0000-0002-6769-4946
tic field, one can separate target cells embedded in a
complex liquid, which has been validated as a viable,
contact-less, bio-compatible and label-free technol-
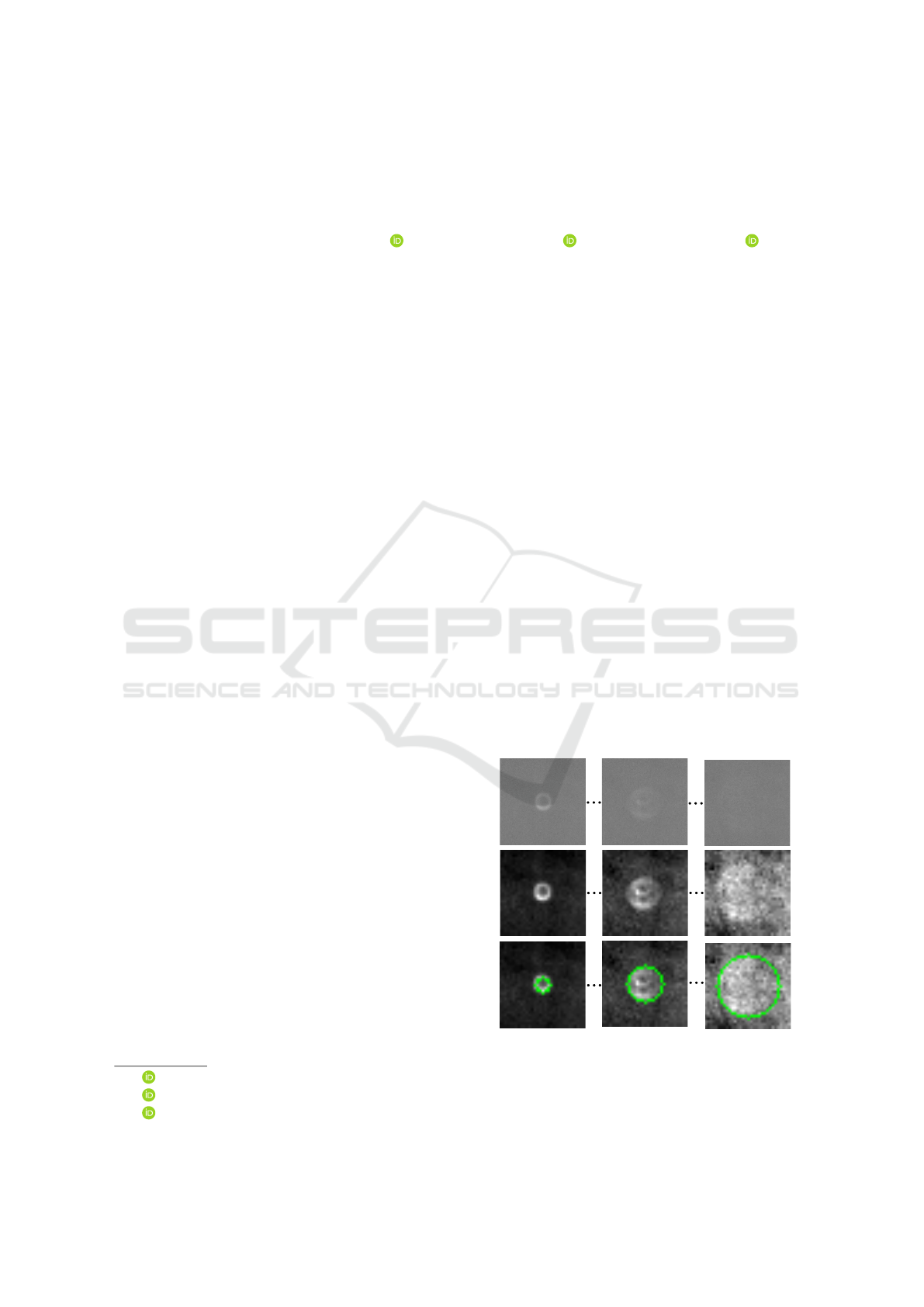
Figure 1: Captured images of a falling particle. The blur
gradually increases along the process. First row: original
images captured by a microscope. Middle row: Same im-
ages with enhanced contrast. Last row: particles fitted by a
curve.
254
Massa, L., Vieira, T., Martins, A., Q. de Araújo, Í., Silva, G. and Santos, H.
Model Fitting on Noisy Images from an Acoustofluidic Micro-Cavity for Particle Density Measurement.
DOI: 10.5220/0011670200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
254-261
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

ogy. Additionally, by incorporating automation and
tackling limitations of conventional strategies, isolat-
ing sub-micron bio-particles can potentially acceler-
ate the development of Point-of-Care devices.
In this work, we use an acoustofluidic 3D printed
device (fluid chamber) to measure the density of
polystyrene beads. The device is initially filled with
a fluid in which the analytes are embedded. Trans-
ducers are then excited to generate an acoustic field
responsible for “trapping” the particle in a given po-
sition. A microscope is used to acquire images of the
cells as exemplified in Fig. 1, where the “trapped” par-
ticle is represented by the first image (top-left). After
the acoustic field is disabled, the particle falls along
time, causing a strong blur as shown in the middle and
final images in Fig. 1, since the particle is no longer
within the microscope focus plane. By observing the
fall velocity (depth per moment in time) and using a
calibration curve obtained in beforehand that relates
the particle’s diameter to depth, one can compute a
good estimate of the cell’s density (cf., Section 2).
Unfortunately, annotating cell’s diameters on dif-
ferent images is a manual process due to a very low
Signal-to-Noise Ratio (SNR) inherent to the blurring
process caused by the particle fall and short Depth-of-
Field of the microscope optical apparatus. Therefore,
one must manually annotate each image in both stages
of calibration and dynamic measurement. Manually
annotating images is a time-consuming and cumber-
some process due to many characteristics. It is prone
to human error and fatigue, rendering automation and
development of Point-of-Care devices unfeasible.
The bead’s diameter is related to the depth, which
can provide information regarding the velocity of the
fall (depth per time). It can be shown that the velocity
with which the particle falls into the medium, along
with other quantities can provide the particle’s den-
sity value (cf. Section 2). Therefore, we propose a
method capable of measuring the particle’s diameters
during its fall. Due to the amount of noise, we found
that fitting a 2D Gaussian in a Gradient Descent fash-
ion can provide reasonable performance in the final
densisty measurement.
Fitting a Gaussian onto a signal (image) is a
method that can be applied on different scenarios for
different purposes. For instance, Ananthanarasimhan
et al., used the technique to estimate the diame-
ter of discharges viewed by High Speed Cameras
(HSC) to characterize a rotating gliding arc (RGA)
reactor (Ananthanarasimhan et al., 2022). Kizel et
al. proposed a method for fully constrained spa-
tially adaptive spectral unmixing for the localiza-
tion of endmembers (Kizel et al., 2015). Lei et
al., used a 2D Gaussian fitting procedure to lo-
cate motion-blurred, weak celestial objects in im-
ages (Lei et al., 2016) for the purpose of orbital de-
bris monitoring. Dai et al., used the method to es-
timate the Point Spread Functions of different opti-
cal apparatus and ultimately increase the resolution of
Single-Photon Emission Computerized Tomography
(SPECT) to sub-millimeter range (Dai et al., 2010).
Anniballe and Bonafoni proposed a Gaussian fitting
procedure aimed at analyzing remotely sensed ther-
mal multi-resolution images to monitor variations in
urban occupancy throughout area and time (Anniballe
and Bonafoni, 2015). Bui et al., proposed the segmen-
tation of murine tumor from noisy ultrasound clinical
images using Gaussian distribution to model local in-
tensities (Bui et al., 2015).
In this context, we propose a Computer Vision
strategy capable of automatically measuring cell di-
ameter on noisy images using a simple, yet effective,
method based on 2D Gaussian fitting using Genetic
Algorithm (GA) and a subsequent refinement with
Gradient Descent (GD) method. Experiments showed
that the methodology provides a satisfactory perfor-
mance and can eventually contribute to the develop-
ment of fully automated devices.
2 EXPERIMENTAL
METHODOLOGY
The density of a particle embedded in a liquid affects
the rate in which it falls (in distance per time). The
relation between fall rate and density can be found by
analyzing the problem’s dynamics, which, for a parti-
cle embedded in a fluidic medium, is ruled by a spe-
cific set of forces. As explained by (Zhao et al., 2014),
forces caused by particle-to-particle interaction, ther-
mal effects and Brownian motion can be disregarded
due to their low order of magnitude when compared
with other forces that act on the system. Thus, the
resulting force that pulls the particle down along the
vertical axis can be expressed as a combination of
gravitational, viscosity and buoyancy forces:
∑
−→
F =
−→
F
gravitational
+
−→
F
viscosity
+
−→
F
buoyancy
(1)
Considering that the vertical axis is pointed down-
ward and approximating the particle as a perfect
sphere, one can express the forces mentioned above
as
−→
F
gravitational
=
4
3
πgr
3
ρ
particle
ˆ
k (2)
−→
F
buoyancy
=
−
4
3
πgr
3
ρ
f luid
ˆ
k (3)
−→
F
viscosity
= (6πrµv)
ˆ
k, (4)
Model Fitting on Noisy Images from an Acoustofluidic Micro-Cavity for Particle Density Measurement
255

Microscope lens
Printed
Cylinder
Actuator
Actuator
Resonant
Chamber
Printed
Cylinder
Resonant
Chamber
Confocal
plane
Levitated
particle
Standing
wave
Confocal
plane
Falling
particle
(a)
(b)
(c)
(d)
Cross-section cut
Actuator off
Actuator on
Figure 2: (a) Diagram of the used hardware. (b) Cross-section cut illustration of the device shown in (a). (c) When the actuator
is on, a standing wave is generated and the particle is trapped in the microscope confocal plane. (d) When the actuator is turned
off, the wave vanishes and the particle falls downwards presenting what we call a dynamic behaviour.
where ρ
particle
is the particle’s density, ρ
f luid
is the
fluidic medium’s density, r is the sphere’s radius, µ
is the fluid’s dynamic viscosity and v is the particle’s
velocity during fall.
Therefore, by applying Newton’s second law, con-
sidering v as particle’s velocity along z axis and solv-
ing the resulting differential equation for the intensi-
ties of the forces defined above, the following expres-
sion is found (Zhao et al., 2014):
v(t) =
2r
2
g(ρ
particle
− ρ
f luid
)
9µ
(1 −e
−
t
τ
) (5)
Since τ = m/6πrηK is very small, the exponential
term from Equation (5) can be ignored. Manipulating
the resulting expression, one can find the final relation
between particle density and fall velocity:
ρ
particle
=
9µv
2r
2
g
+ ρ
f luid
. (6)
I.e., one can compute the particle’s density (in kilo-
grams per cubic meters) if its fall velocity and its
radius are known. During the course of this work
we will analyze the dynamics of 10µm diameter
polystyrene beads, which have a well known density
of around 1050 kg·m
−3
.
2.1 Hardware
For the acoustofluidic device, a cylindrical structure
was fabricated using a 3D printer (cf., Fig. 2a) (San-
tos et al., 2021). A small disk with a diameter of 4mm
and a height of 750µm was cast inside the cylindrical
structure and top sealed by a glass cover which also
acted as an acoustic reflector (cf., Fig. 2b). This disk
was used as an resonant chamber inside which parti-
cles were placed. A small inlet hole could be used
to fill the chamber with fluid solutions of particles.
This solutions could later be removed by an outlet
hole. To deliver our experiments we used a fluidic
solution with density and dynamic viscosity values of
997 kg·m
−3
and 0.89×10
−3
Pa·s, respectively. At the
bottom of the acoustic chamber a circular piezoelec-
tric actuator, with a diameter of 25mm, was attached.
When the actuator is turned on, an acoustic standing
wave is produced inside the resonant chamber (cf.,
Fig. 2c). This creates an acoustic radiation force that
traps the particles in a standing wave node, which has
a height of approximately 95×10
−6
m from chamber’s
bottom. An optical microscope is placed above the
cylindrical structure such that confocal plane matches
the wave node where particles are levitated. Turning
off the actuator causes the acoustic forces to be ex-
tinguished (cf., Fig. 2d), so the particles fall within
the fluidic medium. As the particles fall, they grad-
ually move away from microscope’s confocal plane,
becoming increasingly blurry in acquired images.
2.2 Pipeline for Single Particle
Configuration
During the course of this work, the fluidic solutions
introduced inside the acoustic chamber generally con-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
256

tained around 100 particles. A particle-to-particle in-
teraction caused the appearence of grouped packs of
particles, which makes it difficult to carry out the
experiments. To achieve a single-particle configura-
tion, a sequence of two steps was carefully followed.
Firstly, once a pack of particles started to emerge, the
actuator power was turned off. Lastly, about 10 sec-
onds later, the device was turned on again, causing
only a single particle to be trapped at the acoustic
wave pressure node. Through this pipeline the pro-
posed experiments could be successfully conducted.
2.3 Calibration
As it was already discussed, the density of a particle
can be measured by a model based on the fall pro-
cess inside a microfluidic cavity along with a confocal
optical inspection. As the particle falls, the relative
distance to the image confocal plane becomes larger.
This results in a blurring effect, which increases the
particle size in the image as it gets increasingly defo-
cused.
To analyze the dynamics of a particle with a spe-
cific diameter and unknown density, it is necessary to
use a calibration curve that relates the relative area
of a particle, which has the same diameter, with pre-
viously known heights between particle and the res-
onant cavity bottom during a fall process, as shown
in Fig. 4. Considering that we have n (in our exper-
iments we used 18 images for the callibration step)
acquired images from a particle during fall and its re-
spective heights and areas, relative area values can be
computed by the following equation:
A
relative
=
A
i
− A
1
A
n
− A
1
(7)
where A
1
, A
i
and A
n
are, respectively, area values for
the first, current and last captured images.
Therefore, the computed values for relative area
and height can be fitted to a double exponential func-
tion, which is defined as follows:
h = α
1
exp
−
A
relative
β
1
+ α
2
exp
−
A
relative
β
2
+ ω
0
(8)
where α
1
, α
2
, β
1
, β
2
and ω
0
can assume arbitrary val-
ues, having no physical meaning. The resulting curve
can be later used to estimate height values for a new
particle by applying as input the relative area values
during a fall experiment. Lastly, we can derive the
obtained height values to estimate the falling velocity
for that particle and with Eq. (6), find its density.
2.4 Curve Fitting
An important aspect of the particle area measurement
process is that it is done manually, being more sus-
ceptible to errors. This problem could be overcome
through the usage of a procedure to automatically
compute the particle area in the captured image. Aim-
ing to achieve such solution, during this step we inves-
tigated the feasibility of fitting well known curves to
the particle area in an input image. The tests focused
mainly in the application of 2D Gaussian functions
for this task. The Gaussian is given by the following
expression:
z(x,y) = p exp
"
−
(x −µ
x
)
2
2σ
2
+
(y −µ
y
)
2
2σ
2
4
#
(9)
where:
• p: Gaussian amplitude.
• µ
x
: Position of the Gaussians center in the image
along the (horizontal) x-axis.
• µ
y
: Position of the Gaussians center in the image
along the (vertical) y-axis.
• σ: Standard deviation of the Gaussian (propor-
tional to the radius of the image)
The idea is to fit the Gaussian model into the im-
age by minimizing the mean square error (MSE) be-
tween the Gaussian and each pixel in the image. This
technique is very powerful provided that the noise is
symmetric. Regardless of the amplitude of the noise
present in the image the model will have minimum
MSE only when the parameters of the Gaussian fit as
best as possible with the object in the image.
Once fitted, the Gaussian parameters can be used
to give us measures on the object like its position
(mean of the Gaussian) and size (standard deviation).
2.5 Genetic Algorithm
Defining a Gaussian function that fits to the particle
in an input image is not trivial. From Eq. (9), we can
consider p, µ
x
, µ
y
and σ
2
as curve parameters. Hence,
the task of finding values that best fits an specific par-
ticle image becomes a non-convex optimization prob-
lem.
A common approach to perform optimization
tasks in such cases is the usage of Genetic Algorithms
(GA). This kind of algorithms are inspired by evolu-
tionist theory, where natural selection keeps alive only
the individuals that are more adapted to the environ-
ment and give them the opportunity to pass their genes
to future generations. As exposed by (Konak et al.,
Model Fitting on Noisy Images from an Acoustofluidic Micro-Cavity for Particle Density Measurement
257

2006), in the GA formalism each individual is repre-
sented by a vector called chromosome. Chromosomes
vectors are formed by values called genes. Each chro-
mosome is considered to be a solution to the prob-
lem which is being optimized and are grouped in a set
called population. The chromosome vectors generally
are randomly initialized and through the combination
of their genes, in a iterative process, converge to an
optimized solution.
During this iterative process, two main operations
are conduced: crossover and mutation. Firstly, in the
crossover operation, two chromosomes combine their
genes to generate a new one. Lastly the mutation in-
troduces the chance of random changes to the genes,
which also happen in nature. At each iteration only
the most adapted individuals are used to perform the
crossover operation. This metric of how much an in-
dividual is adapted to the problem is called fitness and
is calculated through a function that is defined accord-
ing to the optimization problem necessities.
Hence, we tested a Genetic Algorithm approach
for the Gaussian function optimization. The popu-
lation was formed by chromosomes with the format
[p,σ
2
], which are parameters used to generate Gaus-
sian curves, as denoted by Eq. 9. During this step we
utilized 13 images of a single particle which were ac-
quired consecutively during the fall process. The par-
ticle initially appears clear and focused and gradually
blurs along the sequence of images. The following
preprocessing steps were done:
• Aligning the particle at the center of the image.
• Image resizing to a 32×32 shape.
• Subtraction of a mean background value.
Then, the resulting images were applied to the
genetic algorithm parameter optimization, which in-
tended to find the best p and σ
2
values for a 2D Gaus-
sian function. As the particles were centralized by the
pre-processing steps, we fixed the µ
x
and µ
y
parame-
ters to zero. The genetic algorithm was executed for
1000 generations, 100 individuals and a mutation rate
of 1%. The fitness of each individual was measured
by the Mean Squared Error between the processed im-
age and the Gaussian curve created with the current
parameter values. This process was repeated for each
test image generating 13 sets of optimized p and σ
2
values.
2.6 Model Fitting Using Gradient
Descent Method
As the genetic algorithm is not deterministic, it may
not reach the global minimum of the error function.
Thus, a natural step is to apply a more controlled op-
timization method having as a starting point the best
parameters found for each image by the approach de-
scribed at Section 2.5. For this task we tested the
application of a Stocastic Gradient Descent (Bottou,
2012) optimizer for p and σ
2
parameters.
Considering that we have a particle image y and
we want to approximate it by a Gaussian curve
z(p,σ
2
), our goal is to find p and σ
2
values that
minimize a chosen loss function L(z(p,σ
2
),y), which
evaluates how far the generated curve is from the de-
sired one. Differential calculus defines the gradient of
a function as a vector that indicates the direction to
move from the current input parameters point so that
one can get the greatest increase rate. Thus, one can
minimize the function value by moving to the oppo-
site direction, which is called gradient descent.
Therefore, assuming w = [p,σ
2
] as an input vec-
tor, we can minimize the loss by updating it’s values
in a iterative process by using the following expres-
sion
w
i+1
= w
i
− α∇
w
L(z(w),y) (10)
where α is called learning rate and is responsible for
determining the update step size at each iteration.
Taking into account that the genetic algorithm
achieved results close to a global minimum, the curve
gradient at this point will have very small values. To
tackle this scenario, we used a higher learning rate
value of 2.0. We also executed the process for 1000
epochs for each set of test images and initial parame-
ters and applied a Mean Squared Error loss function,
which, for two input images, can be defined as fol-
lows:
MSE =
1
W H
W −1
∑
x=0
H−1
∑
y=0
[ f (x,y) − g(x,y)]
2
(11)
where W and H are, respectively, images’ width and
height values.
3 RESULTS AND DISCUSSION
3.1 Height and Relative Area Curve
By applying the proposed methodology, we were able
to obtain a calibration curve for the experiment. With
the usage of ground-truth images, where particle’s
contour was previously known, we extracted parti-
cle’s radius from a pixel-micron relation. Then, we
calculated area values by considering the particle as
a perfect circle and, along with it’s respective height
values, we could generate a calibration curve that re-
lated particle height with relative area, as discussed in
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
258

Figure 3: Image grid showing the results for diameter estimation. First row: Original images (last 8 slices from left to right
– ie. heights). Second row: Processed images. Third row: Contours obtained with the Genetic Algorithm. Bottom row:
Contours found using the Gradient Descent approach.
section 2.3. Numerically fitting the points to the pro-
posed double exponential function (Eq. (8)), we could
achieve the curve shown in Fig. 4.
3.2 Genetic Algorithm and Gradient
Descent
After the application of the pipeline proposed in Sec-
tions 2.5 and 2.6, we could achieve good results for all
test images. Figure 3 presents an image grid contain-
ing results for eight of the thirteen tested images. De-
spite being stochastic, the genetic algorithm was able
to find good parameters for the 2D Gaussian func-
tions. As shown in the second row of Fig. 3, the con-
tours of resulting Gaussian curves seem to fit, if not
perfectly match, the particle contour. The results are
even more interesting for the last images of the se-
quence, where we find a high amount of noise and a
Figure 4: Curve obtained by fitting an exponential function
to height and relative area values during the calibration pro-
cess.
clear contour for the particle is not visually identifi-
able. Still, the algorithm was able to find plausible
parameters for the Gaussian curves as we can see in
Fig. 4.
The application of the Stochastic Gradient De-
scent optimizer did not change the results in general.
Despite giving a lower loss value, the resulting Gaus-
sian curve was practically the same. The only excep-
tions were the results for three of the thirteen test im-
ages, which are shown in fourth, seventh and eighth
columns of Fig. 3. The optimization produced a visi-
ble result, since curve contours changed slightly with
respect to the ones found by the genetic algorithm.
However, for all other images, the plotted Gaussian
contour was exactly the same, which ratifies the good
result found by the genetic approach. In Fig. 5 we
can see resulting loss curves for the parameter tuning
process.
3.3 Density Measurement
Lastly, we used the obtained Gaussian curves to com-
pute particles’ areas in each image and generate rel-
ative area values by applying Eq. (7). Such values
could then be used as input for the calibration curve
discussed in Sections 2.3 and 3.1 to estimate particle’s
height at each image, which are shown in Figure 6.
Then, we numerically derived the height curve
and applied the mean value as particle’s velocity in
Eq. (6) to compute the particle’s density. For this
computation we also used a gravitational accelera-
tion of g = 9.82 m·s
−2
along with previously dis-
cussed values of ρ
f luid
= 997 kg·m
−3
and µ = 0.89 ×
Model Fitting on Noisy Images from an Acoustofluidic Micro-Cavity for Particle Density Measurement
259

Figure 5: Example loss curves during the parameter opti-
mization process. Plots show, respectively, results for ge-
netic algorithm and gradient descent steps.
10
−1
Pa·s. This procedure resulted in a density value
of 1059 kg·m
−3
, which is close to the real density
value of 1050 kg·m
−3
, corresponding to an error of
0.8%.
Such result ratifies our approach as a valid mean
to estimate the area of a particle and its density by ap-
plying the previously described equations. It is worth
mentioning that even in extreme cases, where the par-
ticle was not easily identifiable and the image con-
tained a lot of noise, the proposed method was capa-
ble of giving good estimates for Gaussian curve ap-
proximation for the particle, consequently allowing
the computation of it’s density.
4 CONCLUSIONS
We presented a methodology to obtain a sub-micron
particle’s density using acoustofluidics. This ap-
proach is traditionally performed manually, which
renders the development of point-of-care devices un-
feasible.
Aiming at automating the process, we proposed
the use of 2D Gaussian fitting to retrieve particle’s di-
ameters throughout different positions during fall as
an alternative to analyze its velocity and compute its
Figure 6: Estimated height for each image by applying com-
puted Gaussian areas as input to the calibration curve.
density. After a calibration procedure, the fall dynam-
ics was analyzed and the diameters were used as in-
puts to the calibration function in order to obtain the
corresponding depths along time. This fall velocity
is used alongside different parameters in a given for-
mulation to compute the density. Given a reference
known value of 1050 kg·m
−3
the method provided a
value of 1059 kg·m
−3
, satisfactorily close to the cali-
bration density. As future work, we intend to analyze
the usage of blur score metrics related to Gradient,
Laplacian, Fourier Transform and wavelets as an ap-
proach to the discussed particle fitting problem.
ACKNOWLEDGEMENTS
This work was partially funded by SOFTEX
1
.
REFERENCES
Ananthanarasimhan, J., Raghuram, A., and Rao, L. (2022).
Arc diameter estimation of a rotating gliding arc using
a simple highspeed camera and gaussian fit function.
IEEE Transactions on Plasma Science, 50(6):1401–
1406.
Anniballe, R. and Bonafoni, S. (2015). A stable gaussian
fitting procedure for the parameterization of remote
sensed thermal images. Algorithms, 8(2):82–91.
Bose, N., Zhang, X., Maiti, T. K., and Chakraborty, S.
(2015). The role of acoustofluidics in targeted drug
delivery. Biomicrofluidics, 9:052609.
Bottou, L. (2012). Stochastic gradient descent tricks. In
Neural networks: Tricks of the trade, pages 421–436.
Springer.
Bui, T. M., Coron, A., Mamou, J., Saegusa-Beecroft, E.,
Machi, J., Dizeux, A., Bridal, S. L., and Feleppa, E. J.
(2015). Level-set segmentation of 2d and 3d ultra-
sound data using local gamma distribution fitting en-
1
https://softex.br/
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
260

ergy. In 2015 IEEE 12th International Symposium on
Biomedical Imaging (ISBI), pages 1110–1113.
Dai, T., Ma, T., Liu, H., Cui, J., Liu, Y., Wei, Q., Wu,
J., Wang, S., and Jin, Y. (2010). Low-cost high-
resolution animal spect imaging on a clinical spect
scanner. In 2010 3rd International Conference on
Biomedical Engineering and Informatics, volume 1,
pages 341–344.
Fan, Y., Wang, X., Ren, J., Lin, F., and Wu, J. (2022). Re-
cent advances in acoustofluidic separation technology
in biology. Microsystems & Nanoengineering, 8:94.
Kizel, F., Shoshany, M., and Netanyahu, N. S. (2015). Spa-
tially adaptive hyperspectral unmixing based on sums
of 2d gaussians for modelling endmember fraction
surfaces. In 2015 IEEE International Geoscience and
Remote Sensing Symposium (IGARSS), pages 4440–
4443.
Konak, A., Coit, D. W., and Smith, A. E. (2006). Multi-
objective optimization using genetic algorithms: A
tutorial. Reliability engineering & system safety,
91(9):992–1007.
Lei, Z., Chen, X., and Lei, T. (2016). Sub-pixel location of
motion blurred weak celestial objects in optical sen-
sor image based on elliptical 2d gaussian surface fit-
ting. In 2016 International Conference on Industrial
Informatics - Computing Technology, Intelligent Tech-
nology, Industrial Information Integration (ICIICII),
pages 100–104.
Li, P., Mao, Z., Peng, Z., Zhou, L., Chen, Y., Huang, P.-H.,
Truica, C. I., Drabick, J. J., El-Deiry, W. S., Dao, M.,
Suresh, S., and Huang, T. J. (2015). Acoustic sepa-
ration of circulating tumor cells. Proceedings of the
National Academy of Sciences, 112:4970–4975.
Santos, H. D. A., Silva, G. C., Vieira, T. F., Silva, A. E.,
de Ara
´
ujo, . B. Q., Jacinto, C., Rocha, U., Alexandre-
Moreira, M. S., and Silva, G. T. (2021). Measuring
cell density in a acoustofluidic microcavity. In 2021
IEEE UFFC Latin America Ultrasonics Symposium
(LAUS), pages 1–4.
Wang, Z., Wang, H., Becker, R., Rufo, J., Yang, S., Mace,
B. E., Wu, M., Zou, J., Laskowitz, D. T., and Huang,
T. J. (2021). Acoustofluidic separation enables early
diagnosis of traumatic brain injury based on circu-
lating exosomes. Microsystems & Nanoengineering,
7:20.
Zhao, Y., Lai, H. S. S., Zhang, G., Lee, G.-B., and Li, W. J.
(2014). Rapid determination of cell mass and density
using digitally controlled electric field in a microflu-
idic chip. Lab Chip, 14:4426–4434.
Model Fitting on Noisy Images from an Acoustofluidic Micro-Cavity for Particle Density Measurement
261
