
Unsupervised Tree Detection and Counting via Region-Based Circle
Fitting
Smaragda Markaki
a
and Costas Panagiotakis
b
Department of Management Science and Technology, Hellenic Mediterranean University, Agios Nikolaos, 72100, Greece
Keywords:
Remote Sensing, Tree Detection, Tree Counting, Circle Fitting, Vegetation Index, UAV Images, AIC.
Abstract:
Automatic tree detection and counting is a very important task for many areas such as environmental protec-
tion, agricultural planning, crop yield estimation and monitoring of replanted forest areas. This paper presents
an unsupervised method for tree detection from high resolution UAV imagery based on a modified version of
the Decremental Ellipse Fitting Algorithm DEFA. The proposed Decremental Circle Fitting Algorithm (DCFA)
works similarly to DEFA with the main difference that DCFA uses circles instead of ellipses. According to
DCFA, the skeleton of the 2D shape is calculated first, followed by the initialization of the circle hypotheses
and the application of the Gaussian Mixture Model Expectation Maximization algorithm. Finally, model eval-
uation is performed based on the Akaike Information Criterion. The DCFA method was tested on the Acacia-6
dataset, which depicts six months acacia trees, collected with Unmanned Aerial Vehicles in Southeast Asia
and it exhibits high performance compared with the state-of-the art unsupervised and supervised methods.
1 INTRODUCTION
Automatic tree detection and counting is a very im-
portant task for many areas such as environmental
protection, agricultural planning, crop yield estima-
tion and monitoring of replanted forest areas. The dif-
ferent characteristics of various species of trees also
make it a challenge. However, with the increasing
availability of remote sensing data with high and very
high spatial resolution, we are now able to collect in-
formation at the level of individual trees. Especially,
nowadays, Unmanned Aerial Vehicle (UAV) has be-
come a promising tool for tree detection due to its
high spatial resolution and low cost. The majority of
the studies use high-resolution aerial or satellite im-
agery or LiDAR data from a relatively open forest,
such as oil palms, olive trees, and fruit trees (Osco
et al., 2020; Salam
´
ı et al., 2019). Numerous unsu-
pervised methods, based on the spectral and textural
features of high-resolution imagery or the elevation
features of the Li-DAR data were developed for tree
detection. Recently, Deep Learning based algorithms
have an increasing potential in developing an auto-
mated approach to tree detection and counting with
excellent performance.
Unsupervised tree detection methods are based
a
https://orcid.org/0000-0002-9821-7499
b
https://orcid.org/0000-0003-3680-7087
on the spectral and textural characteristics of high-
resolution imagery or the altitude factor of LIDAR
data. Numerous methods, such as watershed seg-
mentation (Chen et al., 2006), region growing (Erik-
son, 2003), polynomial fitting (Wu et al., 2019), dis-
tance discriminant clustering (Li et al., 2012), adap-
tive mean shift (Yan et al., 2020), template matching
(Vibha et al., 2009), and object-oriented image seg-
mentation (Qiu et al., 2020) are developed to detect
individual trees (Duncanson et al., 2014). Recently,
deep learning based algorithms show an increasing
potential in developing automated approaches to tree
detection and counting with excellent performance.
In this paper, the problem of unsupervised tree
detection is studied, since this is still an open prob-
lem available for further research and in which the
scientific community shows great interest. The pro-
posed method, called Decremental Circle Fitting Al-
gorithm (DCFA), is a modified and simplified version
of the Decremental Ellipse Fitting Algorithm (DEFA)
presented by (Panagiotakis and Argyros, 2016). In
(Panagiotakis and Argyros, 2016), an augmentative
approach AEFA (Augmentative Ellipse Fitting Algo-
rithm) has been also proposed and compared with
DEFA. DEFA outperforms AEFA especially for mid-
dle and high complexity shapes. The goal of DEFA
is to represent a given 2D shape with an automati-
cally determined number of ellipses such that the to-
tal area covered by the ellipses is equal to the area of
Markaki, S. and Panagiotakis, C.
Unsupervised Tree Detection and Counting via Region-Based Circle Fitting.
DOI: 10.5220/0011672700003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 95-106
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
95

100 200 300 400 500
100
200
300
400
500
(a)
100 200 300 400 500
100
200
300
400
500
0
0.1
0.2
0.3
0.4
0.5
(b)
100 200 300 400 500
100
200
300
400
500
(c)
100 200 300 400 500
100
200
300
400
500
(d)
Figure 1: An example of execution of the proposed framework. (a) Original image. (b) RGBVI image (c) Binary image (d)
Tree Detection.
the original shape, without any assumptions or prior
knowledge about the object structure. The first step,
is the creation of the 2D shape’s skeleton. DEFA
starts with a large number of ellipses defined automat-
ically (complex model) and eliminates them gradually
(model simplification). Different solutions involv-
ing different numbers of ellipses are evaluated based
on the Akaike Information Criterion (AIC) (Akaike,
1974). Similarly, the goal of DCFA is to represent
a given 2D shape with an automatically determined
number of circles having the same constraints and
steps as DEFA. Figure 1 depicts an example of the
execution of the proposed framework and its interme-
diate results. The input of DCFA is a binary image
(see Fig. 1(c)) that is computed using the vegetation
index image (see Fig. 1(b)) of the given aerial image
(see Fig. 1(a)).
In (Panagiotakis and Argyros, 2016), DEFA has
been applied on more than 4,000 2D shapes showing
its effectiveness on a variety of shapes, shape transfor-
mations, noise models and noise contamination lev-
els. DEFA has also been successfully applied in the
problem of cell segmentation and counting (Panagio-
takis and Argyros, 2018; Panagiotakis and Argyros,
2020). In (Panagiotakis and Argyros, 2018), the ap-
plication of DEFA provides good performance results
on segmentation and counting of cell nuclei. Better
results on segmentation of touching-overlapping cells
were achieved in (Panagiotakis and Argyros, 2020),
by using an extension of the existing method via fit-
ting of overlapping ellipses. Experimental results
demonstrated the effectiveness of DEFA in segment-
ing potentially overlapping cells.
On the tree detection problem, due to the fact that
trees have a circular shape, the modification of ellipse
fitting to circle fitting provides more robust results.
It holds that if two or more trees are connected in
the binary image (same detected object), then ellipse
fitting DEFA may provide lower AIC using less el-
lipses (under-segmentation) or higher number of el-
lipses (over-segmentation) than the true number of
trees. Such typical example is depicted in Fig. 2. In
this example, when DEFA is used, AIC is minimized
using four ellipses resulting over-segmentation (see
Fig. 2(i)). Additionally, the global minima of AIC
under DEFA is not so clear. On the other side, under
DCFA, it holds that AIC is clearly minimized under
the true number of trees (see Fig. 2(b)). Additionally,
according to our experimental results, due to the sim-
plified model of circle, that requires less computations
than ellipse model, DCFA is 40% faster than DEFA on
tree detection problem. Detailed experimental results
and comparisons of DCFA and DEFA are also pro-
vided in Section 4.
The main contribution of this work is the develop-
ment of a fully unsupervised method for tree detection
from high resolution UAV imagery which exhibits
high performance compared with the state-of-the art
unsupervised or supervised methods. Another contri-
bution, is that we show that circle fitting (DCFA) is
more suitable than ellipse fitting (DEFA) on tree de-
tection problem. DCFA has several advantages over
other existing methods:
• DCFA is a parameter free method.
• DCFA is a region-based method, so it is more ro-
bust and tolerant to noise and boundary segmen-
tation errors than boundary-based methods (e.g.
(Khan et al., 2018)).
• DCFA automatically identifies the number of trees
by considering different numbers of circles and
evaluating them based on the AIC.
The remainder of the paper is organized as fol-
lows: Section 2 describes the related work with
emphasis on the unsupervised and supervised tech-
niques. Section 3 discusses the problem formulation
and describes thoroughly the main steps of the DCFA.
Section 4 presents our experimental results. Section
5 presents the summary and conclusion of the paper
followed by our proposals for future research.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
96

2 RELATED WORK
2.1 Unsupervised Techniques
A segmentation method for tree canopies in aerial im-
ages based on region growing was presented by (Erik-
son, 2003). By simultaneously using a decision func-
tion to include or not include a pixel in the spatial do-
main and in the colour domain, the irregular contour
of the tree canopies is preserved in the segmentation
result. In 2004, another approach for automatic ex-
traction of olive trees from satellite images was intro-
duced by (Karantzalos and Argialas, 2004). Their im-
age processing scheme consisted of two steps. Firstly,
enhancement and smoothing of the image take place
using nonlinear diffusion and then extraction of the
local spatial maxima of the Laplacian which leads to
olive tree extraction.
In 2006, (Chen et al., 2006) presented a method
for individual tree canopies detection from LiDAR
data. This method applied marker-driven water-
shed segmentation to isolate individual trees. Tree
canopies were detected by searching for local max-
ima in a canopy maxima model (CMM) with variable
window sizes. Unlike previous methods, the variable
window sizes were determined by the lower bound
of the prediction intervals of the regression curve be-
tween canopy size and tree height. The canopy max-
ima model was developed to reduce commission er-
rors of tree canopy detection. Tree canopies were also
detected based on the fact that they are usually located
in the centre of the crowns.
An algorithm for individual trees segmentation
from the LiDAR point cloud was developed by (Li
et al., 2012). Their algorithm uses a top-down grow-
ing approach that segments trees individually and se-
quentially from the tallest tree to the shortest one. The
method showed good results in segmenting trees from
the LiDAR point cloud in complex mixed conifer
forests in rugged terrain. LiDAR data were also used
by (Duncanson et al., 2014) as well for single tree de-
tection. Their method used a watershed-based delin-
eation of a canopy height model, (CHM), which was
then refined using the LiDAR point cloud.
In 2018, a method of automatic delineation of tree
canopies based on very high-resolution satellite im-
agery, was presented by (Wagner et al., 2018). This
method was applied to a forest with a very hetero-
geneous tropical canopy cover and includes prepro-
cessing, selection of forested pixels, boundary en-
hancement, detection of pixels in the canopy bound-
aries, correction of shadows for large trees and, fi-
nally, canopy segmentation. Another approach for au-
tomatic citrus trees extraction using multispectral im-
agery from UAVs and digital surface models (DSMs)
was proposed in the same year by (Koc-San et al.,
2018). In this method, tree boundaries were extracted
using sequential thresholding, Canny edge detection
and circular Hough transformations. A combination
of object-oriented image segmentation and regression
analysis was proposed by (Rizeei et al., 2018) for oil
palm trees detection and counting using satellite im-
agery and LiDAR data. The Circular Hough Trans-
form CHT method was presented by (Khan et al.,
2018). Their method was unsupervised and it was
consisted of two steps. The first step was the prepro-
cessing of the satellite imagery with unsharp mask-
ing followed by enhanced multilevel threshold based
segmentation. Taking advantage of circular geometry,
circular blobs among these segments were filtered out
and counted using the Circular Hough Transform.
In 2019, (Wu et al., 2019) proposed a method
to estimate the canopy cover of a pure Ginkgo
biloba L. planted forest in China. Their method was
consisted of an individual tree segmentation-based
method using LiDAR data, a canopy height model-
based method, and a statistical model method. An-
other automated method for individual tree detec-
tion was presented by (Marques et al., 2019). Their
method was based on the calculation of vegetation
indices using visible (RGB) and near-infrared (NIR)
bands combined with the tree canopy height model.
2.2 Supervised Techniques
In recent years, Deep Learning based algorithms have
shown increasing potential for developing automated
approaches to tree detection and counting with ex-
cellent performance. A Multi-level Attention Do-
main Adaptation Network for oil palm tree detection
and counting was developed by (Zheng et al., 2020).
They used a classification method with various post-
processing steps. Semantic segmentation is used to
classify image regions into distinct groups based on
their content. The Fully Convolutional Network FCN
(Long et al., 2015), SegNet (Badrinarayanan et al.,
2017), Unet (Ronneberger et al., 2015), Deeplab
(Chen et al., 2017), and PSPNet (Chen et al., 2017)
are commonly used networks. Yao et al. (Yao et al.,
2021) used four networks, including CNNs and FCNs,
for tree counting. They reported that the encoder-
decoder FCNs showed better results than the CNNs.
A similar study was conducted by (Tong et al., 2021).
Their Point-Wise Supervised Segmentation Network
PWSSN is able to complete the detection and create a
mask for each tree.
Semantic segmentation cannot separate individual
objects from the same category. However, object de-
Unsupervised Tree Detection and Counting via Region-Based Circle Fitting
97

(a)
1 2 3 4 5 6 7 8
-70
-60
-50
-40
-30
-20
-10
AIC - DCFA
(b)
1
2
3
4
5
7
20 40 60 80
20
40
60
80
100
(c) a = 91.4%
1
2
3
4
20 40 60 80
20
40
60
80
100
(d) a = 90.5%
1
2
3
20 40 60 80
20
40
60
80
100
(e) a = 89.3%
1
3
20 40 60 80
20
40
60
80
100
(f) a = 68.7%
1
20 40 60 80
20
40
60
80
100
(g) a = 44.8%
10 20 30 40 50 60 70 80 90
10
20
30
40
50
60
70
80
90
100
110
(h)
2 4 6 8
-100
-90
-80
-70
-60
AIC - DEFA
(i)
1
20 40 60 80 100
20
40
60
80
100
(j) a = 81.0%
1
3
20 40 60 80 100
20
40
60
80
100
(k) a = 86.3%
1
2
3
20 40 60 80 100
20
40
60
80
100
(l) a = 92.2%
1
2
3
5
20 40 60 80 100
20
40
60
80
100
(m) a = 92.9%
Figure 2: (a) Original image and the binary object that is given to the DCFA as input. (b) the AIC criterion for different values
of circles. (c)-(g) The intermediate solutions proposed by DCFA using 6, 4, 3, 2 and 1 circles. Captions show the estimated
values of shape coverage. (h) The association of pixels to three circles which is the final solution estimated by DCFA. (i) The
AIC criterion for different values of ellipses DEFA. (j)-(m) The intermediate solutions proposed by DEFA using 1, 2, 3, 4
ellipses. Captions show the estimated values of shape coverage a.
tection is able to recognise each object in the input
image and categorize it accordingly. A bounding box
can be used for the individual object detection. Com-
mon algorithms include Region-based Convolutional
Neural Networks RCNNs (Girshick et al., 2014), SPP-
Net (He et al., 2015), and Fast RCNNs (Ren et al.,
2015). These methods consist of two steps. First, the
proposed areas are defined, and then, the bounding
box is created and the categorization is performed.
A DeepForest network for detecting individual trees
was proposed by (Weinstein et al., 2020). A deep-
learning method for palm trees detection and counting
on aerial geotagged imagery was proposed by (Am-
mar et al., 2021). Their method involved three object
detection networks. However, the tree canopies could
not be delineated.
Instance segmentation is a combination of seman-
tic segmentation and object detection and it is able to
detect objects and demarcating their boundaries (He
et al., 2017). Instance segmentation is used for count-
ing trees by demarcating their canopies. A Mask R-
CNN model and feature pyramid network FPN were
used by (Ocer et al., 2020) for tree extraction from
high-resolution UAV data with different scales and
tree contents.
In 2019, a deep learning approach to predict and
count oil palm trees in satellite imagery was presented
by (Mubin et al., 2019). The proposed method con-
sisted of two different convolutional neural networks
CNNs to detect young and mature oil palm trees and
GIS during data processing and result storage. A
method for detecting diseased pinus trees that com-
bines deep convolutional neural networks DCNNs,
deep convolutional generative adversarial networks
DCGANs, and an AdaBoost classifier was presented
by (Hu et al., 2020). A convolutional neural network
CNN approach for citrus tree counting from multi-
spectral UAV imagery was presented by (Osco et al.,
2020). The method estimates a dense map with the
certainty that every pixel contains a tree. A mask
region-based convolutional neural network Mask R-
CNN for detecting discontinuous canopy and height
of Chinese fir was presented by (Hao et al., 2021).
In 2022, a deep-learning method based on in-
stance segmentation for tree counting was developed
by (Sun et al., 2022). They used the cascade mask
regions with convolutional neural networks CMask
R-CNN and added three types of attention modules
to build the derivatives of CMask R-CNN. A deep
learning model for detecting and counting olive trees
on satellite images was proposed by (Abozeid et al.,
2022). The proposed SwinTUnet model is a Unet-like
network consisting of an encoder, a decoder, and skip
connections. The Swin Transformer block is the basic
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
98

unit of SwinTUnet to learn local and global semantic
information.
3 TREE DETECTION AND
COUNTING
In this Section, we present the Decremental Circle
Fitting Algorithm (DCFA) for unsupervised tree de-
tection and counting based on a modified version of
the Decremental Ellipse Fitting Algorithm (DEFA)
(Panagiotakis and Argyros, 2016). The main differ-
ence with DEFA is that the proposed method DCFA
approximates an arbitrary 2D shape with a number of
circles instead of ellipses. DCFA is simpler and faster
(40% according to our experiments) than DEFA due
to the simplified model of circle, that requires the es-
timation of three parameters, instead of five parame-
ters model of ellipse. The input to DCFA is a binary
image representing the shape to be modelled by cir-
cles. DCFA starts with an automatically defined, large
number of circles (complex model) and progressively
eliminates some of them (model simplification). Dif-
ferent models are evaluated based on the AIC.
3.1 Problem Formulation of Circle
Fitting
Similarly with the problem formulation of ellipse fit-
ting presented in (Panagiotakis and Argyros, 2016),
hereafter we present the proposed problem formula-
tion of circle fitting so that the total area covered by
the circles is equal to the area of the original shape
without any assumption or prior knowledge about the
object structure (Equal Area Constraint).
We assume a binary image I that represents a 2D
shape. A pixel p of I belongs either to the foreground
FG (I(p) = 1) or to the background BG (I(p) = 0).
The area A of the 2D shape is given by
A =
∑
p∈FG
I(p) (1)
We also assume a set C of k circles C
i
, each with
an individual area
|
C
i
|
. A binary image U
C
is also
defined such that U
C
(p) = 1 at points p that are inside
any of the circles C
i
∈ C and U
C
(p) = 0, otherwise.
Then, we define the coverage α(C) of the 2D shape
by the given set of circles C as:
α(C) =
1
A
∑
p∈FG
I(p) ·U
C
(p) (2)
In essence, α(C) is the percentage of 2D shape
points that are below some of the circles in C. Let
|
C
|
denote the sum of the areas of all circles
|
C
|
=
k
∑
i=1
|
C
i
|
(3)
The problem of Maximum Coverage MAX-α
amounts to computing the parameters of a set C
∗
of
k circles C
i
, so that α(C
∗
) as defined in Equation 2 is
maximised, under the constraint that the sum of the
areas of all circles is equal to the area of the 2D shape
(Equal Area Constraint). Formally,
C
∗
= arg max
C
α(C) s.t.
|
C
|
= A (4)
According to Equation 4, different models of the
same number of circles can be evaluated. However,
in tree detection problem, the number of circles that
better fit on a segmented object is generally unknown.
Therefore, in this work we have used AIC to evaluate
models with different number of circles (see Section
3.3.3).
3.2 Image Segmentation
We assume a high-resolution UAV aerial image con-
taining a large number of trees. Each tree has no
holes and stands out from its local background with
its green color and round shape.
The first step in our approach is to compute the
vegetation index (see Fig. 1(b)). Vegetation indices
maximize sensitivity to vegetation characteristics and
minimize interfering factors such as background soil
reflection, directional effects, or atmospheric effects.
Specifically, we used the red-green-blue vegetation
index RGBVI introduced by (Bendig et al., 2015).
The RGBVI is defined as the normalized difference of
the squared green reflectance and the product of blue
and red reflectance:
RGBV I =
(R
G
)
2
− (R
B
∗ R
R
)
(R
G
)
2
+ (R
B
∗ R
R
)
(5)
where R
G
, R
B
and R
R
denote the red, blue and green
reflectance respectively.
The following step is to create a binary image I
using the Otsu method (Otsu, 1979) and then fill the
holes and reject very low are objects (see Fig. 1(c)).
The binary image I represents a set of 2D shapes to
be modelled by circles. Then for each detected object
(2D shape), DCFA is applied as described below.
3.3 DCFA Algorithm
The DCFA works similarly to DEFA (Panagiotakis
and Argyros, 2016) with the main difference that
DCFA uses circles instead of ellipses. The main steps
Unsupervised Tree Detection and Counting via Region-Based Circle Fitting
99
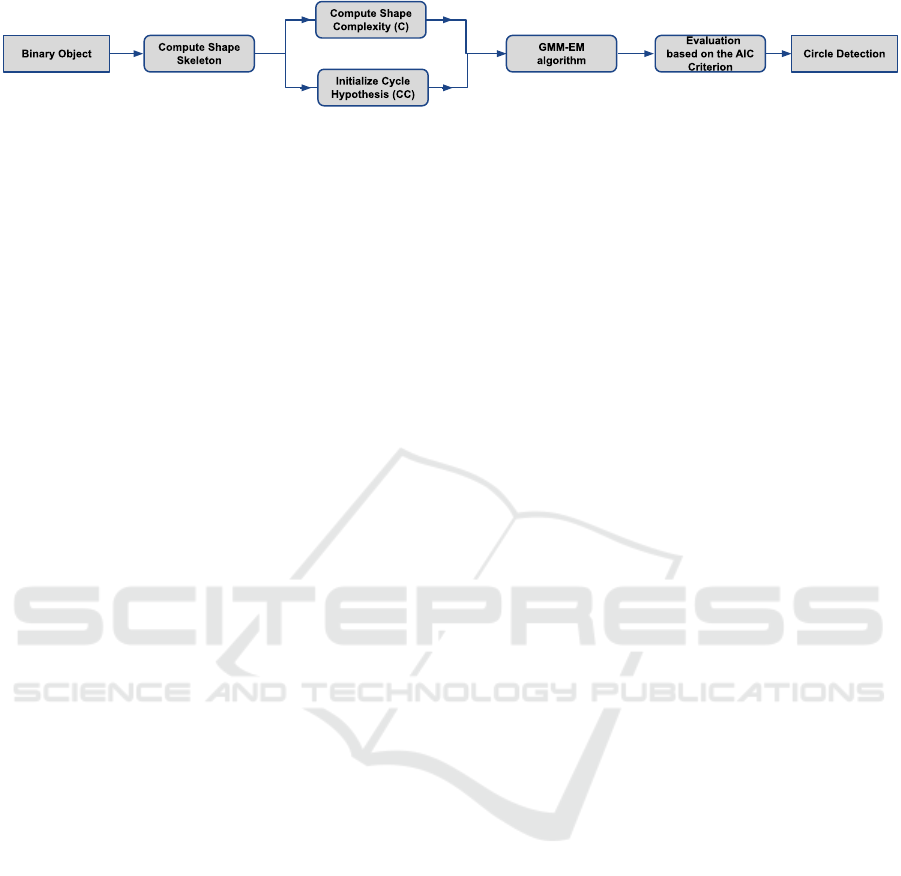
Figure 3: The schema of the main steps of the DCFA.
of the DCFA are depicted in Fig. 3 and are explained
thoroughly below:
3.3.1 Initialization of Circle Hypothesis
First, the medial axis (skeleton) S of the 2D shape is
calculated. Then follows the initialization of the circle
hypotheses. DCFA defines a set CC of circles that are
used as initial circle hypotheses. The centers of these
circles lie on S and their radius is defined by the min-
imum distance of these centers from the contour of
the shape. The circles are considered for inclusion in
CC in decreasing order of radius. Initially, CC = ∅.
Each considered circle is included in CC if its over-
lap with the already selected circles is below a certain
threshold.
3.3.2 Evolution of Circle Hypothesis
The Gaussian Mixture Model Expectation Maximiza-
tion GMMEM algorithm is responsible for computing
the parameters of a fixed number k of circles in C with
the best coverage α(C) of the given 2D shape. This
is achieved by the repeated application of two steps.
The assignment of the shape points to the circles and
the estimation of the circle parameters.
3.3.3 Solving for the Optimal Number of Circles
Different models (i.e., solutions with different num-
bers of circles) are evaluated based on the AIC crite-
rion (see Eq. 6), which weighs the trade off between
model complexity and approximation error. The AIC-
based model selection criterion amounts to minimiz-
ing the following quantity for all possible numbers of
circles, k:
AIC(C) = SC · ln(1 − α(C)) + 2 · k (6)
where SC denotes a shape complexity measure (SC)
defined in (Panagiotakis and Argyros, 2016). SC is
calculated based on the radius of the circles centered
on and maximally inscribed in the 2D skeleton of the
shape. Intuitively, this attains a good balance between
the increased shape coverage achieved when more cir-
cles are used to approximate a particular shape and the
associated increased complexity of that model (due to
the increase in the number of circles used).
To minimize the AIC criterion, DCFA reduces the
number of circles considered starting from a large,
automatically defined set (the set CC of circles de-
fined in the initialization step). Since there is no lower
bound on the AIC as the number of circles decreases,
this process continues until the set of all circles con-
tains a single circle. In each iteration (each candidate
number of circles from
|
CC
|
down to 1), a pair of cir-
cles is selected as candidates for merging. The pair
that is finally merged is the one that gives the lowest
AIC. Of all possible models (with a minimum of 1 to a
maximum of
|
CC
|
circles), the one with the minimum
AIC is finally reported.
Figure 2 illustrates an example run of DCFA. The
colour-map of Figure 2(c)–2(g) corresponds to the
distance of foreground pixels from the center of the
circles introduced so far (cold and warm colours de-
note small and large distances, respectively). As
shown in Fig. 2(c) and 2(d), the circles that are lo-
cated in the most over-segmented regions are selected
so as to maximise the expected coverage. Figure 2(b)
shows the AIC criterion for different values of circles.
The solution with three circles clearly minimizes AIC.
Figure 2(e) and 2(h) shows the final solution and the
clustering of pixels, respectively.
4 EXPERIMENTAL EVALUATION
4.1 Dataset
For the assessment of the proposed methodology we
used the Acacia-6 dataset introduced by (Tong et al.,
2021). The dataset was created by Unmanned Aerial
Vehicles in an area covered by acacia trees in South-
east Asia. The size and morphological characteris-
tics of these trees change greatly during the grow-
ing season, resulting in obscurations and overlaps.
Therefore, the Acacia dataset is created with different
months such as 6 and 12 months (Tong et al., 2021).
For this work, the Acacia-6 dataset was used which
contain acacia trees at the age of six months (see Fig.
4). The shape of trees in Acacia-6 is complete, and
there are clear boundaries between objects. In the ex-
periment, we divided the original Acacia-6 image into
247 sub-images of the same size.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
100

Figure 4: Acacia-6 Dataset (Tong et al., 2021).
4.2 Evaluation Metrics
To evaluate the proposed method, we used the metrics
True Positive Rate (T PR) also knows as Recall, Pre-
cision (Prec) and F
1
-score (F
1
). The following equa-
tions are used to define the above mentioned metrics:
T PR =
T P
T P + FN
(7)
Prec =
T P
T P + FP
(8)
F
1
=
2T P
2T P + FP + FN
(9)
where T P is the value of true positives meaning the
correctly identified trees, FN is the value of false neg-
atives meaning the number of trees that are not recog-
nized by the algorithm and FP is the value of false
positives meaning the number of tree predictions that
contain no trees.
High precision means that almost every prediction
is a tree, regardless the number of trees that are not
recognized by the algorithm. In contrast, a high recall
means that almost all trees were found, regardless the
number of tree predictions that contain no trees. The
F
1
-score is the harmonic mean of precision and recall.
4.3 Baseline Methods
The proposed method is compared with the following
unsupervised methods:
• CHT method proposed by (Khan et al., 2018) is
based on Circular Hough Transform as described
in Section 2.1.
• CHT++ method, an improved version of the
CHT method that reduce false positives of CHT.
The CHT++ method overcomes this drawback by
adding an area constraint that excludes spurious
tree predictions. This is done by removing the de-
tected circles having low the number of pixels that
belong to the binary image I (green area).
• DEFA method proposed by (Panagiotakis and Ar-
gyros, 2016) as described thoroughly in Section
1.
In order to show the robustness of the proposed
method, it is also compared with the following state-
of-the art supervised and weakly supervised methods:
• Point-Wise Supervised Segmentation Network
PWSSN proposed by (Tong et al., 2021) which
was described in Section 2.2.
• Weakly Supervised Deep Detection Network WS-
DDN introduced by (Bilen and Vedaldi, 2016)
which performs simultaneously region selection
and classification.
• Proposal Cluster Learning PCL introduced by
(Tang et al., 2018) which generates proposal clus-
ters to learn refined instance classifiers by an iter-
ative process.
• Continuation Multiple Instance Learning C-MIL
method presented by (Wan et al., 2019) which
targets alleviating the non-convexity problem
of multiple instance learning using a series of
smoothed loss functions.
4.4 Experimental Results
Tables 1 and 2 summarize the results of the unsu-
pervised and supervised methods, respectively, ob-
tained with the Acacia-6 dataset for the original im-
age. The results of the supervised methods (PWSSN,
WSDDN, PCL and C-MIL) are presented according
to the experimental evaluation of (Tong et al., 2021).
In our experiments, we have also divided the original
Acacia-6 image into 247 sub-images. By dividing the
original image into sub-images we are able to calcu-
late the average scores of the individual scores per im-
age of the 247 sub-images. This is done to perform an
experiment where all images have the same weight in
the metric calculations (equal weight per area). Thus,
Table 3 shows the average values calculated for the
247 sub-images of the Acacia-6 dataset from the indi-
vidual results per image.
As expected Tables 1 and 3 show the same rank-
ing of methods with very little difference between the
results of the original image (see Table 1) and the
average results of the 247 sub-images (see Table 3).
The DCFA method clearly outperforms all the unsu-
pervised methods under any metric. CHT++ ranks
second in terms of F
1
-score. It ranks third in terms
of the T PR value (but with a very slight difference
Unsupervised Tree Detection and Counting via Region-Based Circle Fitting
101
from the CHT method), however, has a much higher
Prec value. This points to the main drawback of the
CHT method, which is that it leads to many false pos-
itives and low Prec value. The CHT method is sec-
ond in terms of T PR value, but has a very low Prec
value yielding the lowest F
1
-score over all methods.
The CHT++ method, on the other hand, overcomes
this drawback by adding an area constraint that rejects
false tree predictions, resulting in a higher Prec value.
DEFA is the third top performing method in terms of
F
1
-score, that shows the lowest T PR value, while its
Prec value is sufficiently high. This shows that DEFA
is not able to identify all trees. Its main disadvantage
is the higher fusion, which means that two adjacent
trees can be identified as one.
Table 1: Results of the unsupervised methods obtained on
the Acacia -6 dataset for the original image.
Method TPR Prec F1
CHT 0.875 0.556 0.680
CHT++ 0.861 0.853 0.857
DEFA 0.826 0.897 0.860
DCFA 0.876 0.908 0.892
Table 2: Results of the supervised methods and DCFA ob-
tained on the Acacia -6 dataset for the original image.
Method TPR Prec F1
PWSSN 0.975 0.983 0.979
WSDDN 0.702 0.776 0.715
PCL 0.751 0.785 0.773
C-MIL 0.826 0.879 0.868
DCFA 0.876 0.908 0.892
Table 3: Average scores of the unsupervised methods com-
puted over individual scores per image of the 247 sub-
images obtained from the Acacia-6 dataset.
Method TPR Prec F1
CHT 0.870 0.602 0.694
CHT++ 0.861 0.859 0.852
DEFA 0.849 0.889 0.818
DCFA 0.870 0.904 0.883
As it is explained above, the proposed method
clearly outperforms all the unsupervised methods un-
der any metric either in the original image (Table
1) or in the sub-images (Table 3). Between the
supervised methods (see Table 2), PWSSN method
proposed by (Tong et al., 2021) is the top-ranking
method. The proposed method outperforms the rest
of the supervised methods, showing that a fully un-
supervised technique can be compared with super-
vised techniques with satisfactory results. The C-MIL
method ranks third. The PCL and the WSDDN meth-
ods fail to provide satisfactory results.
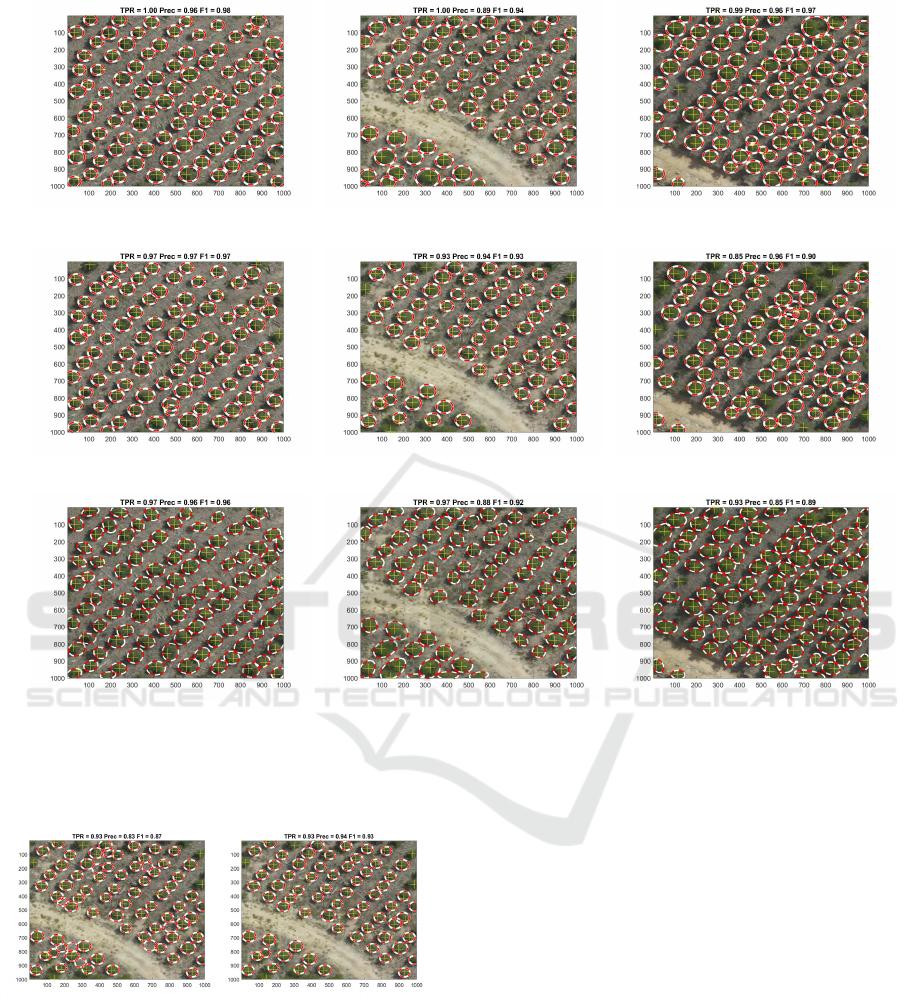
Figure 5 shows three example results of the DCFA,
the CHT++, and the DEFA methods, respectively,
from the Acacia-6 dataset. In all cases, the proposed
method successfully detects the vast majority of trees
and achieves a higher F
1
-score value than the other
methods. In most of the cases, the detections of the
DCFA agree with the human intuition. More specif-
ically, Figures 5(a) and 5(b) show that the DCFA
method correctly identifies all trees, and in Figure
5(b) the vast majority of trees are correctly detected.
In these examples, the CHT++ method is second in
terms of F
1
-score due to lower T PR value especially
in Fig. 5(f). Concerning the DEFA, in some cases fails
to discriminate adjacent trees, since they may be iden-
tified as one due to used ellipse model. Such cases are
depicted in the bottom right of Fig. 5(g), in the bottom
left of Fig. 5(h) and in the top right of Fig. 5(i).
Figure 6 shows an example of the results of the
CHT and CHT++ methods. As shown, the T PR value
is the same and sufficiently high for both methods.
Figure 6(a) shows the main drawback of the CHT
method, which is that it leads to many false positives
and thus a low Prec value. The CHT++ method, on
the other hand, overcomes this drawback by adding
an area constraint that rejects false tree predictions,
resulting in a higher Prec value.
According to our experiments there exist some
cases where the proposed framework provides low
performance results that are mainly due to the fail-
ure of the image segmentation step, as depicted in
Figure 7. Figures 7(a) and 7(b) depict two sample
results of the DCFA with low performance on TPR
and Prec metrics, respectively. In the Figure 7(a), the
used RGBVI index fails to segment some small trees
on the right part of the image due to the low image
quality. In the Figure 7(b), the used RGBVI index de-
tects dense vegetation (plants) as tree region, resulting
false alarms. Therefore, even in false detections there
is green color that could be confusing even to the hu-
man eye. In both cases, the DCFA well detects the
rest segmented trees.
5 CONCLUSIONS AND FUTURE
RESEARCH DIRECTIONS
An unsupervised method (DCFA) for accurate and au-
tomatic tree detection and counting was presented in
this work. DCFA is a modified version of the ellipse
fitting algorithm (DEFA) introduced by (Panagiotakis
and Argyros, 2016) with the main difference that
it uses circles instead of ellipses. Different models
are evaluated based on the Akaike Information Crite-
rion (AIC). The experimental results on the Acacia-
6 dataset showed the effectiveness of the proposed
method as well as its superiority in comparison to
relevant unsupervised state-of-the-art methods. Ad-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
102
(a) DCFA (b) DCFA (c) DCFA
(d) CHT++ (e) CHT++ (f) CHT++
(g) DEFA (h) DEFA (i) DEFA
Figure 5: Sample results of the unsupervised methods on the Acacia-6 dataset. The detected and the ground truth trees are
plotted with white-red circles and yellow pluses respectively. (a),(b),(c) The results of the DCFA method. (d),(e),(f) The
results of the CHT++ method. (g),(h),(i) The results of the DEFA method.
(a) CHT (b) CHT++
Figure 6: A sample results of the CHT (a) and the CHT++
(b) method on the Acacia-6 dataset. The detected and the
ground truth trees are plotted with white-red circles and yel-
low pluses respectively.
ditionally, the DCFA has been compared with state of
the supervised methods yielding comparable results
on the Acacia-6 dataset. In this work, we also show
that the simpler and faster method DCFA is more suit-
able than DEFA on tree detection problem due to the
circular tree shapes.
There is no doubt that automatic tree detection has
been extensively explored by the scientific commu-
nity, but there are still some challenges ahead. Auto-
matic tree detection and counting is an evolving field
of research and can effectively contribute to the study
of many areas such as environmental protection, agri-
cultural planning, crop yield estimation and monitor-
ing of replanted forest areas. Our goal is not only to
improve our method but also to develop such meth-
ods for automatic tree detection that can be used as
input in a second step for green and agriculture plan-
ning. Forest road network planning is an important
and challenging task since its spatial arrangement re-
duces the incidence of fires and prevents the spread of
fires on larger areas (Stefanovi
´
c et al., 2016).
Unsupervised Tree Detection and Counting via Region-Based Circle Fitting
103

(a) DCFA
(b) DCFA
Figure 7: Two sample results of the DCFA with low perfor-
mance on (a) TPR and (b) Prec metrics. The detected and
the ground truth trees are plotted with white-red circles and
yellow pluses respectively.
ACKNOWLEDGMENTS
This research has been co-financed by the European
Union and Greek national funds through the Oper-
ational Program Competitiveness, Entrepreneurship
and Innovation, under the call RESEARCH - CRE-
ATE - INNOVATE B cycle (project code: T2EDK-
03135).
REFERENCES
Abozeid, A., Alanazi, R., Elhadad, A., Taloba, A. I., El-
Aziz, A., and Rasha, M. (2022). A large-scale dataset
and deep learning model for detecting and counting
olive trees in satellite imagery. Computational Intelli-
gence and Neuroscience, 2022.
Akaike, H. (1974). A new look at the statistical model iden-
tification. IEEE transactions on automatic control,
19(6):716–723.
Ammar, A., Koubaa, A., and Benjdira, B. (2021). Deep-
learning-based automated palm tree counting and ge-
olocation in large farms from aerial geotagged images.
Agronomy, 11(8):1458.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2017).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. IEEE transac-
tions on pattern analysis and machine intelligence,
39(12):2481–2495.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S.,
Broscheit, J., Gnyp, M. L., and Bareth, G. (2015).
Combining uav-based plant height from crop surface
models, visible, and near infrared vegetation indices
for biomass monitoring in barley. International Jour-
nal of Applied Earth Observation and Geoinforma-
tion, 39:79–87.
Bilen, H. and Vedaldi, A. (2016). Weakly supervised deep
detection networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2846–2854.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2017). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Chen, Q., Baldocchi, D., Gong, P., and Kelly, M. (2006).
Isolating individual trees in a savanna woodland using
small footprint lidar data. Photogrammetric Engineer-
ing & Remote Sensing, 72(8):923–932.
Duncanson, L., Cook, B., Hurtt, G., and Dubayah, R.
(2014). An efficient, multi-layered crown delineation
algorithm for mapping individual tree structure across
multiple ecosystems. Remote Sensing of Environment,
154:378–386.
Erikson, M. (2003). Segmentation of individual tree crowns
in colour aerial photographs using region growing
supported by fuzzy rules. Canadian Journal of For-
est Research, 33(8):1557–1563.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Hao, Z., Lin, L., Post, C. J., Mikhailova, E. A., Li, M.,
Chen, Y., Yu, K., and Liu, J. (2021). Automated tree-
crown and height detection in a young forest plan-
tation using mask region-based convolutional neural
network (mask r-cnn). ISPRS Journal of Photogram-
metry and Remote Sensing, 178:112–123.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Spatial pyra-
mid pooling in deep convolutional networks for visual
recognition. IEEE transactions on pattern analysis
and machine intelligence, 37(9):1904–1916.
Hu, G., Yin, C., Wan, M., Zhang, Y., and Fang, Y. (2020).
Recognition of diseased pinus trees in uav images us-
ing deep learning and adaboost classifier. Biosystems
Engineering, 194:138–151.
Karantzalos, K. and Argialas, D. (2004). Towards automatic
olive tree extraction from satellite imagery. In Geo-
Imagery Bridging Continents. XXth ISPRS Congress,
pages 12–23. Citeseer.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
104

Khan, A., Khan, U., Waleed, M., Khan, A., Kamal, T., Mar-
wat, S. N. K., Maqsood, M., and Aadil, F. (2018).
Remote sensing: an automated methodology for olive
tree detection and counting in satellite images. IEEE
Access, 6:77816–77828.
Koc-San, D., Selim, S., Aslan, N., and San, B. T. (2018).
Automatic citrus tree extraction from uav images and
digital surface models using circular hough transform.
Computers and electronics in agriculture, 150:289–
301.
Li, W., Guo, Q., Jakubowski, M. K., and Kelly, M. (2012).
A new method for segmenting individual trees from
the lidar point cloud. Photogrammetric Engineering
& Remote Sensing, 78(1):75–84.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Marques, P., P
´
adua, L., Ad
˜
ao, T., Hru
ˇ
ska, J., Peres, E.,
Sousa, A., and Sousa, J. J. (2019). Uav-based auto-
matic detection and monitoring of chestnut trees. Re-
mote Sensing, 11(7):855.
Mubin, N. A., Nadarajoo, E., Shafri, H. Z. M., and Ha-
medianfar, A. (2019). Young and mature oil palm tree
detection and counting using convolutional neural net-
work deep learning method. International Journal of
Remote Sensing, 40(19):7500–7515.
Ocer, N. E., Kaplan, G., Erdem, F., Kucuk Matci, D., and
Avdan, U. (2020). Tree extraction from multi-scale
uav images using mask r-cnn with fpn. Remote sens-
ing letters, 11(9):847–856.
Osco, L. P., De Arruda, M. d. S., Junior, J. M., Da Silva,
N. B., Ramos, A. P. M., Moryia,
´
E. A. S., Imai, N. N.,
Pereira, D. R., Creste, J. E., Matsubara, E. T., et al.
(2020). A convolutional neural network approach for
counting and geolocating citrus-trees in uav multi-
spectral imagery. ISPRS Journal of Photogrammetry
and Remote Sensing, 160:97–106.
Otsu, N. (1979). A threshold selection method from gray-
level histograms. IEEE transactions on systems, man,
and cybernetics, 9(1):62–66.
Panagiotakis, C. and Argyros, A. (2016). Parameter-free
modelling of 2d shapes with ellipses. Pattern Recog-
nition, 53:259–275.
Panagiotakis, C. and Argyros, A. (2020). Region-based
fitting of overlapping ellipses and its application to
cells segmentation. Image and Vision Computing,
93:103810.
Panagiotakis, C. and Argyros, A. A. (2018). Cell segmen-
tation via region-based ellipse fitting. In 2018 25th
IEEE International Conference on Image Processing
(ICIP), pages 2426–2430. IEEE.
Qiu, L., Jing, L., Hu, B., Li, H., and Tang, Y. (2020).
A new individual tree crown delineation method for
high resolution multispectral imagery. Remote Sens-
ing, 12(3):585.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Rizeei, H. M., Shafri, H. Z., Mohamoud, M. A., Pradhan,
B., and Kalantar, B. (2018). Oil palm counting and age
estimation from worldview-3 imagery and lidar data
using an integrated obia height model and regression
analysis. Journal of Sensors, 2018.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Salam
´
ı, E., Gallardo, A., Skorobogatov, G., and Barrado, C.
(2019). On-the-fly olive tree counting using a uas and
cloud services. Remote Sensing, 11(3):316.
Stefanovi
´
c, B., Stojni
´
c, D., and Danilovi
´
c, M. (2016).
Multi-criteria forest road network planning in fire-
prone environment: a case study in serbia. Jour-
nal of Environmental Planning and Management,
59(5):911–926.
Sun, Y., Li, Z., He, H., Guo, L., Zhang, X., and Xin, Q.
(2022). Counting trees in a subtropical mega city us-
ing the instance segmentation method. International
Journal of Applied Earth Observation and Geoinfor-
mation, 106:102662.
Tang, P., Wang, X., Bai, S., Shen, W., Bai, X., Liu, W.,
and Yuille, A. (2018). Pcl: Proposal cluster learning
for weakly supervised object detection. IEEE trans-
actions on pattern analysis and machine intelligence,
42(1):176–191.
Tong, P., Han, P., Li, S., Li, N., Bu, S., Li, Q., and Li,
K. (2021). Counting trees with point-wise supervised
segmentation network. Engineering Applications of
Artificial Intelligence, 100:104172.
Vibha, L., Shenoy, P. D., Venugopal, K., and Patnaik, L.
(2009). Robust technique for segmentation and count-
ing of trees from remotely sensed data. In 2009 IEEE
International Advance Computing Conference, pages
1437–1442. IEEE.
Wagner, F. H., Ferreira, M. P., Sanchez, A., Hirye, M. C.,
Zortea, M., Gloor, E., Phillips, O. L., de Souza Filho,
C. R., Shimabukuro, Y. E., and Arag
˜
ao, L. E. (2018).
Individual tree crown delineation in a highly diverse
tropical forest using very high resolution satellite im-
ages. ISPRS journal of photogrammetry and remote
sensing, 145:362–377.
Wan, F., Liu, C., Ke, W., Ji, X., Jiao, J., and Ye, Q. (2019).
C-mil: Continuation multiple instance learning for
weakly supervised object detection. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 2199–2208.
Weinstein, B. G., Marconi, S., Aubry-Kientz, M., Vincent,
G., Senyondo, H., and White, E. P. (2020). Deep-
forest: A python package for rgb deep learning tree
crown delineation. Methods in Ecology and Evolu-
tion, 11(12):1743–1751.
Wu, X., Shen, X., Cao, L., Wang, G., and Cao, F. (2019).
Assessment of individual tree detection and canopy
cover estimation using unmanned aerial vehicle based
light detection and ranging (uav-lidar) data in planted
forests. Remote Sensing, 11(8):908.
Yan, W., Guan, H., Cao, L., Yu, Y., Li, C., and Lu, J. (2020).
Unsupervised Tree Detection and Counting via Region-Based Circle Fitting
105

A self-adaptive mean shift tree-segmentation method
using uav lidar data. Remote Sensing, 12(3):515.
Yao, L., Liu, T., Qin, J., Lu, N., and Zhou, C. (2021). Tree
counting with high spatial-resolution satellite imagery
based on deep neural networks. Ecological Indicators,
125:107591.
Zheng, J., Fu, H., Li, W., Wu, W., Zhao, Y., Dong, R., and
Yu, L. (2020). Cross-regional oil palm tree count-
ing and detection via a multi-level attention domain
adaptation network. ISPRS Journal of Photogramme-
try and Remote Sensing, 167:154–177.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
106
