
Step Towards Generalization: Fault Classification in Multivariate
High-Frequency Data from Different Operating Regimes of
Hydraulic Rock Drill System
Nagi Reddy, Ashit Gupta, Gauri Dhande and Vijaykumar Pasupureddy
Center for Intelligent Power, Eaton India Innovation Center, Pune, India
Keywords: Industrial Application, Fast Oscillating Hydraulic Rock Drill, Fault Classification, ResNet.
Abstract: Hydraulic rock drills operate under harsh environments of excessive humidity and vibrations. In operation,
the fundamental machine frequency is hampered by various loading disturbances created by the pressure
waves generated during the rock drill application, which initiates faults at different times during a complete
cycle of rock drilling. These faults include failure of internal parts, excessive channel openings and damaged
parts, causing enough non-linearity in the pressure data generated. A fault in such machinery can multiply
quite rapidly, leading to accidents like complete failure of the equipment and loss of life. Therefore, it is
crucial to classify the fault and inform the operator of it. The fault classification challenge escalates further
when the rock drill operates on previously unknown operating conditions. In the present work, we compare
the performance of deep learning models like Long short-term memory, Convolutional Neural Network, and
Residual Network to classify faults, whose signature is recorded in data generated at a frequency of 50kHz
when a rock drill is in operation. We also demonstrate how the accuracy of models vary when the models are
tested on unseen operating conditions. An overall analysis is provided to generalize a model for fault
classification in industrial applications over contrasting operating conditions.
1 INTRODUCTION
Hydraulic rock drills have a wide range of
applications in various industries, such as mining,
rock excavation projects, highway tunnels, and
railways, due to their high precision, cleanliness, and
safety (Ma et al., 2019). Modern rock drills are
generally mounted on vehicles and their mechanism
uses pneumatics or hydraulics (Jakobsson et al,
2022). Hydraulic rock drills are used to fracture huge
rocks and concrete structures by applying pressure
through continuous impact & rotation, with a force of
around 600kN. The repetitive impact of piston makes
the machine vulnerable to different faults.
Classification of faults is crucial to ensure safety and
maintain high maintenance standards. Different
operating regimes recorded different signatures of
fault, making the classification problem more
challenging. Therefore, a model that guarantees that
a fault is captured and categorizes it appropriately is
needed.
Due to high reliability, robustness, and low cost,
only pressure sensors are mounted on hydraulic rock
drills. Pressure waves generated are recorded on these
sensors at a frequency as high as 50kHz. These
pressure signals are recorded at the inlet fitting called
percussion pressure (P
in
), damper pressure inside the
outer chamber (P
din
), and pressure in the volume
behind the piston (P
o
). The magnitude and phase of
these pressure signals depend on the impact of the
drill on the rock or sudden valve openings (Jakobsson
et al., 2022). The pressure is recorded for a certain
period depending on the overall operation time of the
hydraulic rock drill or the occurrence of an
unforeseen event such as faults. The measured signal
is periodic in nature, typically, governed by a
sequence of valve openings at different times, making
it difficult to view the signal as a superposition of
similar wave occurrences in the past. Additionally,
these events correlate to fault occurrences, and they
vary with a change in test setup or change in operating
conditions, therefore, making it difficult to spot the
occurrence of individual events at such a high
frequency of event generation.
Hydraulic rock drill operates under high-
performance demands in harsh environments
856
Reddy, N., Gupta, A., Dhande, G. and Pasupureddy, V.
Step Towards Generalization: Fault Classification in Multivariate High-Frequency Data from Different Operating Regimes of Hydraulic Rock Drill System.
DOI: 10.5220/0011676100003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 856-863
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
subjected to excessive humidity and vibrations
(Jakobsson et al., 2022). In operation, the
fundamental machine frequency is hampered by
various loading disturbances created by the pressure
waves, generated during the rock drill application.
This initiates faults at different times during a
complete cycle of rock drilling. These faults include
failure of internal parts, excessive channel openings,
and damaged parts. The fault classification challenge
escalates further when the hydraulic rock drill
operates in an unseen test environment. Table 1
represents 11 types of faults occurring in hydraulic
rock drills in operation.
Table 1: Fault Classes for a hydraulic rock drill.
Class
Numbe
r
Class
Code
Class Description
Fault 0 NF No fault
Fault 1 T Thicker drill Steel
Fault 2 A Leakage from high-pressure
channel to low-
p
ressure channel
Fault 3 B Leakage from the control channel
the to return channel
Fault 4 R Damaged return accumulato
r
Fault 5 S Longer drill steel
Fault 6 D The damper orifice is larger than
usual
Fault 7 Q Low flow to the damper circuit
Fault 8 V Valve damage
Fault 9 O The orifice on control line outlet
larger than usual
Fault 10 C The charge level in high-pressure
accumulator is low
Research in classification algorithms based on
machine learning, deep learning, or symbolic learning
has certainly taken up a developmental pace since the
last decade (Gupta et al., 2021). Every year work on
new classification approaches has been proposed that
work extremely well on benchmark datasets provided
under the UCR archive for numerous industrial
applications and academic interests (Dau et al., 2019).
Few of the frequently tested algorithms for such tasks
are LSTMs, CNNs, and transformers. with their
variants including architecture changes or ensemble
strategies (Gupta et al. 2021).
Researchers have proposed some related work on
fault classification using sensor data with time series
models or other deep learning frameworks. Sun et al.
(2020) have proposed a CNN-based framework by
using univariate sensor data from a hydrogen sensor.
They have also proposed the usage of random forest
as a bagging algorithm to generalize their model.
Although they were able to achieve an accuracy of
100% for 6 faults, the faults considered had very
different signatures, and the faults that possess signals
closer to the base faults were considered as future
work (Sun et al., 2020). Few researchers have used
deep convolutional neural networks (DCNN) to
identify faults in gearbox sensor data (Jing et al.,
2017). They transformed the data into 3 fusion levels
and were able to achieve high accuracies after
transformation. However, the data present in training,
validation, and test sets were taken up from the same
test facility. They did not have any separate data from
different test setups or different operating conditions.
Researchers have also experimented with 3 types of
datasets of motor bearing with 2 faults outer ring and
inner ring faults using a Transfer Convolutional
Neural Network (Wen et al., 2020). They also divided
the data into train, validation, and test from the same
datasets and provided k-fold validation. Both the
aforementioned works make it difficult to scale up the
model for different test facilities or operating
conditions. Zhang et al. (2021) have used a hybrid
attention Resnet to train a model for fault diagnosis of
wind turbine gearbox. The present work is inspired by
their idea of fault diagnosis, and we propose the use
of Resnet for generalizing a model for multiple
operating regimes.
Jakobsson et al. (2022), have also proposed a time
series-based approach for fault classification in
hydraulic rock drill operations. They have employed
Dynamic Time Warping (DTW) with its several
variations. They have used only one pressure sensor
(percussion pressure) and have reported the best
accuracy of 73% on the test dataset (i.e., changing
operating conditions). The hypothesis followed
requires that signatures of one fault would always
follow the same trend in any operating condition and
the change would only be compromised in the phase
difference, where the DTW algorithm with its
variants can help. In the present work, we employ
several deep learning-based approaches to capture the
spatial and temporal patterns in the multivariate data
and discuss the best model that can be deployed.
The present work proposes the development of
algorithms where operating regimes of industrial data
changes in relation to the necessary application, as a
result, similar trends are unseen while model training.
This work intends to obtain a generic model for
deployment with an assumption that data available for
training is scarce and the test operating conditions are
completely unseen by the model. The contribution of
this work provides an approach for solving industrial
problems with changing operating regimes,
decomposing domains based on available data, and
lastly, selecting the best model for deployment.
Step Towards Generalization: Fault Classification in Multivariate High-Frequency Data from Different Operating Regimes of Hydraulic
Rock Drill System
857
The paper is organized as follows: Section 1
describes the problem statement, industrial standards,
related work, and the identified gaps. Section 2
describes the data source and descriptive study.
Section 3 describes the architectures of the algorithms
used. Section 4 presents the methodology followed to
select the best model. Section 5 presents the key
results and provides relevant discussion around them.
Lastly, section 6 summarizes the approach & results
and provides concluding remarks.
2 DATA DESCRIPTION
The hydraulic rock drill system in consideration uses
3 sensors, mounted at different locations on the drill,
recording pressure at a frequency of 50kHz. The
pressure data used for analysis is generated in a test
facility where the faults are induced in the system for
different operating conditions (Jakobsson et al.,
2022). Multiple instances are captured in the test
facility by changing the operating conditions of the
hydraulic rock drill. The test facility is kept as close
to real-world scenarios, where drilling usually takes
place. Any modifications to percussion pressure (P1)
and feed force (P2) have a significant impact on how
hydraulic rock drill operates. Experiments have been
conducted by changing feed force and percussion
pressure and as a result pressure variations are
recorded on the 3 pressure sensors. Figure 1 illustrates
the changing operating conditions with respect to
controllable variables (P1 and P2). Additionally,
changes in ambient conditions and the direction of
drilling are a few uncontrollable parameters that alter
the pressure signal recordings, thereby making the
fault classification task complex.
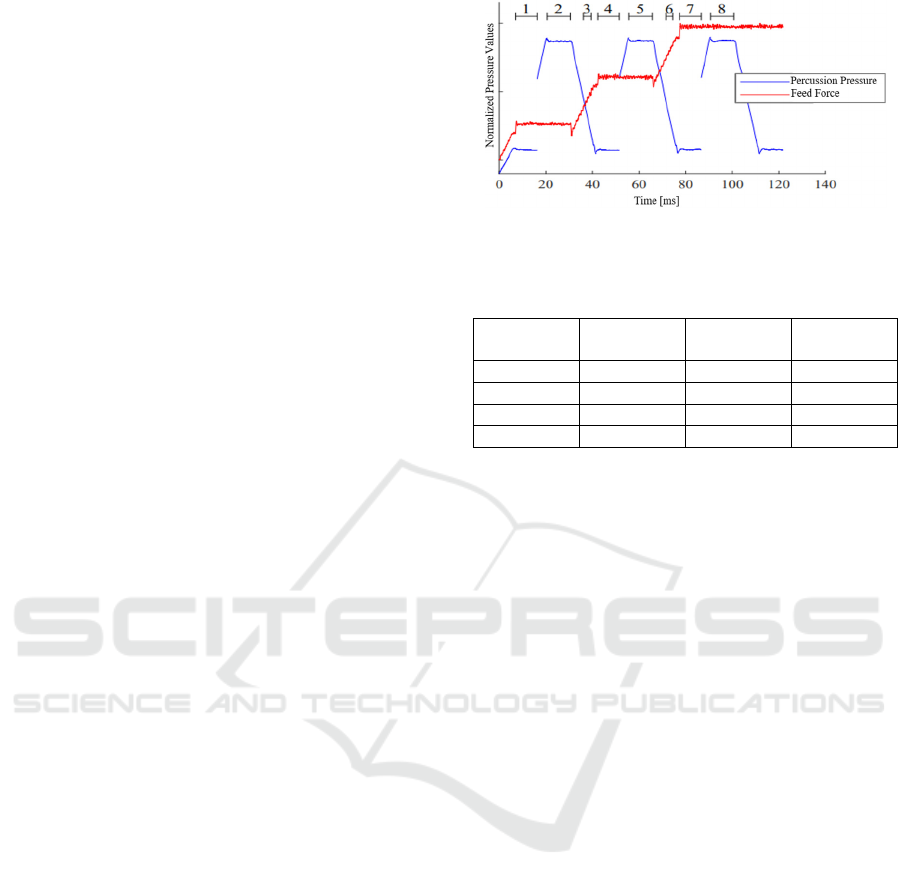
Figure 1 illustrates eight distinct operational
regimes that have been recorded based on the
outcomes of trials carried out in the testing facility.
Each of the operating regimes provided has a
different set of P1-P2 values. Table 2 provides the
number of observations captured in each of the
operational regimes. The fault classes were evenly
separated in all the regimes.
Figure 3 illustrates how the same fault differs
under several operational regimes. The x-axis in the
figure represents the time in milliseconds and the y-
axis represent the P
in
, P
din,
and P
o
for a single fault.
From the exploratory analysis in figure 3, it can be
noted that a single fault's patterns alter over various
operating regimes and cannot be superimposed on
one another. Therefore, advanced algorithms are
needed to classify faults with high accuracy.
Figure 1: Percussion pressure & feed force variation for all
8 operating regimes (Jakobsson et al., 2022).
Table 2: Regime-wise data samples available.
Regime ID Number of
sam
p
les
Regime ID Number of
sam
p
les
Regime 1 7311 Regime 5 7977
Regime 2 7867 Regime 6 3293
Regime 3 3184 Regime 7 7935
Re
g
ime 4 7597 Re
g
ime 8 8461
3 NETWORK ARCHITECTURES
We tested 3 deep learning architectures to provide the
best possible accuracy even when the operating
conditions change. We consider the work done by
Jakobsson et al. (2022), as a baseline and explore the
outcomes from deep learning architectures. Each of
the network architectures is built using the functional
API in TensorFlow 2.0 (Abadi et al., 2016)
3.1 Long Short-Term Memory
Long short-term memory (LSTM) is a sequential
deep learning algorithm introduced to overcome the
vanishing gradients problems usually noticed in
Recurrent Neural Networks (RNN) (Hochreiter et al.,
1997). LSTM networks are known to provide
excellent results when the features in the data have
temporal dependencies. In the past LSTMs have been
successful in industrial applications such as problems
with classification applications, prediction
applications, anomaly detection, forecasting
applications, etc. (Balouji et al., 2018, Gupta et al.,
2022). The predictions from an LSTM model are
controlled by 3 control gates; an input/update gate,
forget gate, and an output gate. The previous hidden
state and the current input are fed to the input/update
gate, while forget gate controls the amount of
previous information to be passed to the next cell
state, and lastly, the output gate decides the final state
of the cell. Figure 4 presents the architecture of the
network used in the current study.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
858

Figure 2: (a) Normalized damper pressure inside the outer chamber, (b) Normalized pressure in the volume behind the piston,
and (c) Normalized percussion pressure at inlet fittings vs time in milliseconds.
Figure 3: Normalized damper pressure, Normalized pressure in the volume behind the piston & normalized percussion
pressure showing the variation in fault signatures in all operating regimes for different cases. 1. No-fault scenario, 2. Thicker
drill steel fault, and 3. Leakage from high pressure to low pressure challenge fault.
Step Towards Generalization: Fault Classification in Multivariate High-Frequency Data from Different Operating Regimes of Hydraulic
Rock Drill System
859

The model architecture is illustrated in figure 4.
The model consists of 2 LSTM layers of 80 and 60
LSTM units, with an activation function as tanh. The
2 LSTM layers are followed by 3 dense layers
consisting of 50, 25, and 11 dense units respectively.
The first 2 dense layers are provided with a relu
activation function while the last output layer has a
softmax activation function. The tuning of the
hyperparameters is carried out using a random search
method. The model is trained over 260 epochs with a
batch size of 32 and a learning rate of 1e-4.
Figure 4: LSTM architecture.
3.2 Convolutional Neural Networks
Convolutional neural networks have shown great
promise in a variety of applications, especially in
image-based datasets for applications such as image
classification, image detection etc. (Aloysius et al.,
2017). The main difference between a neural network
and the convolutional neural network is in the
selective connection of neurons between hidden
layers. Because of this sparse connectivity, a CNN
model can learn spatial features implicitly. CNN
model uses a convolutional operator resulting in
neurons sharing weights, thereby, reducing the
complexity of the model by decreasing the number of
trainable weights. Recently, the performance of
CNN-based architectures has shown promise in
industrial applications such as fault diagnosis,
classification, and prediction (Jiao et al, 2020).
The CNN model architecture is illustrated in
figure 5. The model consists of 4 CNN-1D layers with
128, 256, 128, and 128 filters respectively. The filter
size and activation functions used are shown in figure
5. The 4 CNN layers are followed by 2 dense layers
(including the output layer) with the number of
neurons in each layer equal to 20 and 11. A batch size
of 8 with a learning rate of 0.00001 is used to train the
model for 100 epochs.
Figure 5: CNN architecture.
3.3 Residual Networks (ResNets)
ResNets were introduced to improve the performance
of deep neural networks in Image classification (He
et al., 2016). The introduction of skip connections
between residual blocks enabled the gradient flow to
the bottom layers. Figure 6 shows an image of such
residual block connection. ResNet achieved state-of-
the-art performance on ImageNet, COCO datasets
etc. Similarly, it has shown optimal performance in
time series Datasets in UCR (Dau et al., 2019).
Figure 6: Connection within a ResNet.
The customized ResNet architecture used in this
study is illustrated in figure 7. The network consists
of 3 Residual blocks with convolutional filters
64,128, and 128 respectively. Each Residual block
consists of 3 convolutional 1-D with filter sizes
{5,3,1}, followed by batch normalization with
activation function relu. These residual blocks are
followed by a global average pooling layer and an
output layer with 11 neurons. A batch size of 8 with a
learning rate of 0.00001 is used to train the model for
100 epochs.
All the models are trained on a GPU machine with
specifications: NVIDIA RTX A4000 processor on
ubuntu 22.04 version on a 64-bit operating system,
with 48 GB RAM.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
860
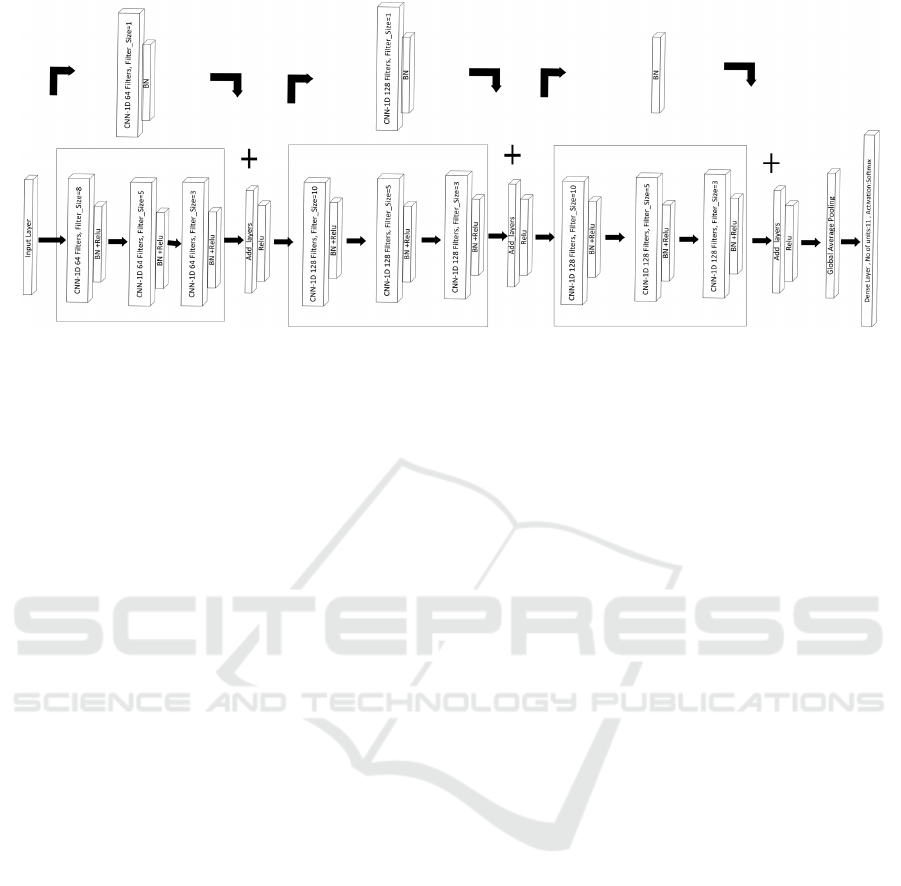
Figure 7: Resnet architecture.
4 METHODOLOGY
Figure 3 illustrates the change in operating regimes
with respect to the change in P1 and P2 for a hydraulic
rock drill system. Jakobsson et al. have also
mentioned that changing feed force (P2) majorly
affects the fault signature which lead to inaccuracy in
their model. Therefore, it is important to develop a
framework where the accuracy of the model is not
hampered by changing operating conditions.
Considering generalization to be of paramount
importance we formulated 3 parallels to build models
as accurate as possible that works even in changing
operating conditions.
4.1 Enclosed Operating Regime
Prediction
Different operating regimes are generated by varying
both the parameters (P1 & P2), which are shown as 1-
8 numeric values in figure 1. These operating regimes
indicate the real-time working conditions, such as the
1
st
operating regime may imply straightforward
drilling circumstances in delicate rocks, whilst the 8
th
operating regime may indicate some complex rock
excavation in coal mines. In the enclosed operating
regime prediction approach, data from one operating
regime is split into train, validation, and test dataset
in the ratio 70:15:15. Deep learning architectures
presented in section 3 are trained, and their
performances are recorded. The 15% test data and
adjacent regime data are used to evaluate the
performance of all models. The latter enables the
selection of best models performing well not only on
the base operating regime (training data operating
regime) but also on an unseen operating regime.
As an example, 70% of data from 1
st
operating regime
is used to train the models. These models are then
used to predict faults on samples from 2
nd
operating
regime only. This test is done on the adjacent regime
with respect to P2 so that model’s judgment makes
sense.
4.2 Intermediate Operating Regime
Prediction
In the intermediate operating regime prediction
approach, operating regimes 1,2,4,5, and 6 are used to
train a model, and the model’s performance is tested
on the 3
rd
operating regime. In this method, the model
is trained from scratch from 1 boundary to another
while allowing a few operating circumstances for
testing in between, ensuring great performance on
intermediate unseen data.
4.3 Exterior Operating Regime
Prediction
Rock drill application involves crushing both soft and
hard rocks, requiring changes in feed force from as
low as 20kN to 600kN (Jakobsson et al, 2022). Since
there is such a large variation in force, many times
rock drill machines have not seen high-force tasks.
Safety being of utmost importance necessitates the
prediction and classification of a fault even if the
large feed force operating condition is not seen during
model training. Therefore, a model that can
accurately anticipate a class is needed for exterior
operating regime prediction approach.
Here, we use the training datasets 1, 2, 3, and 4
to train the CNN & Resnet models from scratch and
test the models on test datasets 5 & 6. Then, in order
Step Towards Generalization: Fault Classification in Multivariate High-Frequency Data from Different Operating Regimes of Hydraulic
Rock Drill System
861

to generalize the model to any operating regime, the
model architecture with the highest accuracy in
exterior operating regime prediction would be
adopted. It would be trained on operating regimes 1,
2, 3, 4, 5 & 6 and tested on operating regimes 7 & 8.
5 RESULTS & DISCUSSIONS
Prior work done by Jakobsson et al. (2022) sets the
baseline for any model development, where
improvement in the results of fault classification
demands an increase in accuracy. They used Dynamic
Time Warping (DTW) and its derivatives to achieve
an accuracy of 100% on predictions in an enclosed
operating regime and reported 73% on any other
operating regime. In the present work, we consider
their achievements as the baseline and develop
models that work well not only on enclosed operating
regime data points but also on intermediate and
exterior operating regime data points.
Three types of base model architectures are used
to classify faults: LSTM, CNN, and ResNets. Each
model is randomly customized to produce the highest
test accuracy for each approach presented in section
4. The ResNet model is customized by changing the
skip connections in the architecture for the
classification problem under study. The time taken to
train, number of trainable parameters, and the results
are presented in Table 4.
Table 4 presents results for all three operating
regimes. First, all three models are tested on the
enclosed operating regime. Here, all the models are
trained on 70% of data from 1
st
operating regime and
are validated on 30% of data from the same regime.
All 3 algorithms predict the fault class with at least
98.32% accuracy in training data and at least 89%
accuracy in validation data. ResNets perform best
with 100% accuracy in both, while the performance
of LSTM-based model can be deemed as overfitted.
Although, the accuracy of prediction for all the
models is quite high on the data from the same
operating regime, but all models failed to produce
good accuracy when tested on data points from 2
nd
operating regime. ResNets-based model generated
maximum accuracy equal to 42.48%, while the
LSTM-based model had the least accuracy equivalent
to 10.52%. This drop in accuracy can be attributed to
the unobserved operational condition of percussion
pressure (P1) by the models, resulting in the recording
of unseen pressure disturbances on the 3 pressure
sensors. Therefore, it can be concluded that models
require more knowledge of the operation of hydraulic
rock drills to generalize for any operating condition.
Second, we analyze models’ performance on the
intermediate operating regime. Here, all the models
are trained on 70% of the training data (operating
regimes: 1,2,4,5,6) and their predictions are validated
on 30% of unseen data from the same regimes, while
the data recorded in the 3
rd
operating regime is
considered to be the test data. The accuracy of the
LSTM-based model dropped drastically for both
validation and test datasets. The drop in accuracy can
be attributed to the failure of LSTM networks to
classify on samples from extrapolated data, similar to
the results reported by Trask (Trask et al, 2018). On
the other hand, CNN & ResNet- based models were
able to capture faults perfectly.
Lastly, we examine the performance of CNN-
based and ResNet-based models on exterior operating
regimes. ResNet architecture provided the highest test
accuracy on operating regimes 5 & 6, equivalent to
98.61%. Moreover, the recall value on the fault is
generally considered a measure of safety for
equipment. Table 3 shows that none of the actual fault
cases are classified as healthy working conditions (no
fault class) of the equipment, resulting in a recall
value equivalent to 1 over fault. A high recall value is
generally considered as a safety measure for any
equipment in operation. Here, the recall value for the
ResNet model is equal to 1, hence satisfying the
safety criteria for such huge machinery.
Additionally, the model was also trained on
operating regimes 1,2,3,4,5, & 6 and tested on
operating regimes 7&8. ResNet model was able to
produce an accuracy of 98.09%, which ensures the
stability of the model in varying operating conditions.
Therefore, it can be noted that ResNet model with the
proposed architecture, trained with the least amount
of time taken, is a better measure of accuracy and
safety for the equipment under study.
Table 3: Confusion matrix for ResNet on 5&6 operating
regime for fault & no faults scenario.
Predicted
Actual
Fault No-Fault
Fault 10259 0
No-Fault 27 984
6 CONCLUSIONS
In this paper the generalized approach for the Fault
Classification over different operating regimes of
hydraulic rock drill system has been presented. The
outcomes of 3 different model architectures built
using LSTM, CNN, and ResNets base layers were
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
862

compared for each region. An accuracy of 100% was
produced on previously unknown intermediate
regimes by CNN & ResNet. On unobserved exterior
regimes, the proposed ResNet architecture
demonstrated the best accuracy of 98.61% and
98.09%. Furthermore, classification done using
Resnet model produced a recall value of 1 over faults,
guaranteeing the safety of operation in such complex
machinery. Therefore, it can be concluded that the
proposed ResNet architecture is the generalized
model for fault classification in any operating regime
of a hydraulic rock drill setup.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., ... & Zheng, X. (2016). Tensorflow: Large-
scale machine learning on heterogeneous distributed
systems. arXiv preprint arXiv:1603.04467.
Aloysius, N., & Geetha, M. (2017, April). A review on deep
convolutional neural networks. In ICCSP (pp. 0588-
0592). IEEE.
Balouji, E., Gu, I. Y., Bollen, M. H., Bagheri, A., & Nazari,
M. (2018, May). A LSTM-based deep learning method
with application to voltage dip classification. In 2018
18th ICHQP (pp. 1-5). IEEE.
Chen, X., Zhang, B. and Gao, D. (2021). Bearing fault
diagnosis base on multi-scale CNN and LSTM model. In
Journal of Intelligent Manufacturing, 32(4), pp.971-987.
Dau, H. A., Bagnall, A., Kamgar, K., Yeh, C. C. M., Zhu,
Y., Gharghabi, S., ... & Keogh, E. (2019). The UCR
time series archive. In IEEE/CAA Journal of
Automatica Sinica, 6(6), 1293-1305.
Gupta, A., Jadhav, V., Patil, M., Deodhar, A., & Runkana,
V. (2021, July). Forecasting of Fouling in Air Pre-
Heaters Through Deep Learning. In ASME Power
Conference (Vol. 85109, p. V001T01A002). American
Society of Mechanical Engineers.
Gupta, A., Masampally, V. S., Jadhav, V., Deodhar, A., &
Runkana, V. (2021, January). Supervised Operational
Change Point Detection using Ensemble Long-Short
Term Memory in a Multicomponent Industrial System.
In 2021 SAMI (pp. 000135-000141). IEEE.
Hochreiter, S., & Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8), 1735-1780.
He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep residual
learning for image recognition. In Proceedings of the
IEEE conference on computer vision and pattern
recognition (pp. 770-778).
Ismail Fawaz, H., Forestier, G., Weber, J., Idoumghar, L.,
& Muller, P. A. (2019). Deep learning for time series
classification: a review. Data mining and knowledge
discovery, 33(4), 917-963.
Jakobsson, E., (2022). Condition Monitoring in Mobile
Mining Machinery., Doctoral dissertation, Linköping
University Electronic Press.
Jakobsson, E., Frisk, E., Krysander, M. and Pettersson, R..,
(2022). Time Series Fault Classification for Wave
Propagation Systems with Sparse Fault Data. arXiv
preprint arXiv:2203.16121.
Jiao, J., Zhao, M., Lin, J., & Liang, K. (2020). A
comprehensive review on convolutional neural network
in machine fault diagnosis. Neurocomputing, 417, 36-63.
Jing, L., Wang, T., Zhao, M. and Wang, P. (2017). An
adaptive multi-sensor data fusion method based on deep
convolutional neural networks for fault diagnosis of
planetary gearbox. Sensors, 17(2), p.414.
Ma, W., Geng, X., Jia, C., Gao, L., Liu, Y. and Tian, X.
(2019). Percussion characteristic analysis for hydraulic
rock drill with no constant-pressurized chamber
through numerical simulation and experiment.
In Advances in Mechanical Engineering, 11(4),
p.1687814019841486.
Sun, Y., Zhang, H., Zhao, T., Zou, Z., Shen, B. and Yang,
L., (2020). A new convolutional neural network with
random forest method for hydrogen sensor fault
diagnosis. IEEE Access, 8, pp.85421-85430.
Trask, A., Hill, F., Reed, S. E., Rae, J., Dyer, C., & Blunsom,
P. (2018). Neural arithmetic logic units. Advances in
neural information processing systems, 31.
Wen, L., Li, X. and Gao, L. (2020). A transfer
convolutional neural network for fault diagnosis based
on ResNet-50. Neural Computing and Applications,
32(10), pp.6111-6124.
Zhang, K., Tang, B., Deng, L., & Liu, X. (2021). A hybrid
attention improved ResNet based fault diagnosis
method of wind turbines gearbox. Measurement, 179,
109491.
Table 4: Classification accuracy for all the models in all operating regimes.
S.No Regime Model base
Laye
r
# Trainable
Parameters
Training
Time
Training
Accuracy (%)
Validation
Accuracy (%)
Test
Accuracy (%)
1 Enclosed
Operating Regime
LSTM 65311 ~4 hrs 98.32 89.1 10.52
2 CNN 987291 ~1.5 hrs 100 99.2 28.62
3 ResNet 506571 ~1 h
r
100 100 42.48
4 Intermediate
Operating Regime
LSTM 65311 ~4hrs 85.37 63.78 41.21
5 CNN 987291 ~1.5 hrs 100 100 100
6 ResNet 506571 ~1 h
r
100 100 100
7 Exterior Operating
Regime
LSTM 65311 ~4 hrs 81.21 41.35 22.94
8 CNN 987291 ~1.5 hrs 100 100 91.25
9 ResNet 506571 ~1 h
r
100 100 98.61
Step Towards Generalization: Fault Classification in Multivariate High-Frequency Data from Different Operating Regimes of Hydraulic
Rock Drill System
863
