
Strokes Trajectory Recovery for Unconstrained Handwritten Documents
with Automatic Evaluation
Sidra Hanif
a
and Longin Jan Latecki
b
Temple University, Philadelphia, PA, U.S.A.
Keywords:
Handwriting Strokes Trajectory Recovery, Dynamic Time Warping, Chamfer Distance, LSTM, Word
Detection, Automatic Evaluation.
Abstract:
The focus of this paper is offline handwriting Stroke Trajectory Recovery (STR), which facilitates the tasks
such as handwriting recognition and synthesis. The input is an image of handwritten text, and the output
is a stroke trajectory, where each stroke is a sequence of 2D point coordinates. Usually, Dynamic Time
Warping (DTW) or Euclidean distance-based loss function is employed to train the STR network. In DTW loss
calculation, the predicted and ground-truth stroke sequences are aligned, and their differences are accumulated.
The DTW loss penalizes the alignment of far-off points proportional to their distance. As a result, DTW loss
incurs a small penalty if the predicted stroke sequence is aligned to the ground truth stroke sequence but
includes stray points/ artifacts away from ground truth points. To address this issue, we propose to compute a
marginal Chamfer distance between the predicted and the ground truth point sets to penalize the stray points
more heavily. Our experiments show that the loss penalty incurred by complementing DTW with the marginal
Chamfer distance gives better results for learning STR. We also propose an evaluation method for STR cases
where ground truth stroke points are unavailable. We digitalize the predicted stroke points by rendering the
stroke trajectory as an image and measuring the image similarity between the input handwriting image and
the rendered digital image. We further evaluate the readability of recovered strokes. By employing an OCR
system, we determine whether the input image and recovered strokes represent the same words.
1 INTRODUCTION
For a long time, handwriting analysis, such as hand-
writing recognition (Faundez-Zanuy et al., 2020) and
signature verification (Diaz et al., 2022), has been
an active research area. There are two categories of
handwriting, online and offline. Online handwriting
is captured in real-time on a digital device such as a
tablet screen with a stylus pen. In contrast, the hand-
written text scanned or captured by a camera from a
physical medium such as paper is referred to as of-
fline handwriting (Liu et al., 2011; Plamondon and
Srihari, 2000). The handwriting inscribed on a digital
device or captured from a physical medium is often
unconstrained with varying orientations. The avail-
ability of temporal movements of a stylus pen for on-
line handwriting makes the handwriting analysis task
easier. However, for offline handwriting, the input is
limited to handwritten images, making handwriting
analysis much more difficult.
The current STR architectures for English hand-
a
https://orcid.org/0000-0001-6531-7656
b
https://orcid.org/0000-0002-5102-8244
writing use lines of text (Archibald et al., 2021; Bhu-
nia et al., 2018) or characters of alphabets (Rabhi
et al., 2021; Rabhi et al., 2022) as input. One of
the recent datasets for STR, IAM-online (Marti and
Bunke, 2002), includes only line-level annotations.
For English handwritten documents, line detection is
a prominent topic for processing historical document
images (Boillet et al., 2021; Alberti et al., 2019).
A learning-free mechanism for detecting lines in a
historical handwritten document is presented in (Ku-
rar Barakat et al., 2020). Another algorithm for line
segmentation in handwritten documents is proposed
in (Surinta et al., 2014b). This work is limited to
separating the overlapping words only in horizontal
lines (Surinta et al., 2014a). For more complex Arabic
handwriting, (Gader and Echi, 2022; Gader and Echi,
2020) segment the curved text lines with overlapping
words. A generative model to segment lines for Ara-
bic handwriting is proposed in (Demır et al., 2021).
This method can segment slanting and curved lines
but is not accurately enclosing a complete word in
lines because they consider a binary mask to train the
generative model. We have tried a few line segmenta-
Hanif, S. and Latecki, L.
Strokes Trajectory Recovery for Unconstrained Handwritten Documents with Automatic Evaluation.
DOI: 10.5220/0011700100003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 661-671
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
661

tion (Surinta et al., 2014b; Alberti et al., 2019) meth-
ods. They are either proposed for non-English text
or do not work well for unconstrained non-horizontal
text in handwritten document images. Even when
line detection works well, performing STR on words
yields better performance than on lines, as this paper
demonstrates (the first two rows of Table 2).
Non-English handwriting datasets (Barakat et al.,
2019; Yavariabdi et al., 2022) emphasize word-level
annotations and provide word, line, and page-level an-
notations for historical handwritten documents. The
Chinese, Japanese, Arabic, and Tamil (Bhunia et al.,
2018; Nguyen et al., 2021; Viard-Gaudin et al., 2005;
Privitera and Plamondon, 1995) datasets for stroke
trajectory also provide word-level annotations. Older
STR datasets such as IRONOFF (Viard-Gaudin et al.,
1999) consists of words/characters/digits of English
handwriting. Unipen dataset (Guyon et al., 1994)
is available with character-level annotation, whereas
IRONOFF consists of words. But we were unable to
obtain any copies of IRONOFF datasets. In contrast,
the publically available English handwriting dataset
IAM-online (Marti and Bunke, 2002) for STR in-
cludes line-level annotations with missing word-level
annotations. Therefore, we propose constructing a
large-scale word-level annotation for the IAM-online
dataset in our work. In recent years conventional
methods (Diaz et al., 2022; Senatore et al., 2022) de-
vised rule-based algorithms for signature/word trajec-
tory recovery. Moreover, stroke trajectory recovery
has progressed through deep neural networks. For
stroke trajectory recovery, (Bhunia et al., 2018) in-
troduces a first trainable convolutional network. This
LSTM architecture learns strokes from Tamil scripts
with Euclidean distance loss, making it hard to apply
to long words with multiple strokes, such as English
handwriting. Recently, (Rabhi et al., 2021; Rabhi
et al., 2022) introduced an attention mechanism to
train the writing order recovery for characters. These
attention networks are trained on characters with L1-
loss, which is, again difficult to train for words. Sim-
ilarly, (Nguyen et al., 2021) employs an LSTM ar-
chitecture with an attention layer and Gaussian mix-
ture model trained with cross-entropy loss. How-
ever, it is limited to encoding only a single Japanese
character. Recently, (Archibald et al., 2021) presents
the stroke trajectory recovery, where LSTM is trained
with a Dynamic Time Waring (DTW) loss function.
(Archibald et al., 2021) has a disadvantage that it can
work only for a line of text. Apart from the restric-
tion of the input to the lines of text, DTW loss has
a drawback for long sequence matching: it sums the
loss function for all the points when finding the best
alignment between two sequences. Hence order pre-
serving stray points, i.e., predicted stroke points far
apart from their matching originals, have a minor in-
fluence on the DTW loss. However, they result in
noticeable artifacts in the predicted strokes. To cir-
cumvent this issue, we propose to add the Chamfer
distance (Akmal Butt and Maragos, 1998) between
predicted and ground truth point sets to the loss func-
tion. In order to prevent penalizing stroke points with
small deviations, we augment the Chamfer distance to
a marginal Chamfer distance. Applying the marginal
Chamfer distance yields a more significant penalty for
stray points/artifacts.
Another challenge a stroke trajectory recovery
system faces is the availability of ground truth strokes.
Annotating ground-truth strokes for the STR system
is a laborious process that demands time and resource
allocation. Therefore, our work proposes an eval-
uation algorithm that does not require ground truth
stroke points to evaluate the STR system. To the best
of our knowledge, the evaluation of the STR system
without ground truth stroke points has not been pro-
posed before. The main contributions of this work
are as follows: 1) We introduce large-scale word-level
annotations for the English handwriting STR dataset
sampled from the IAM-online dataset. Our version of
the IAM-online dataset contains 62,000 words. 2) A
word-level STR method estimates loss for each word
rather than averaging DTW loss over the entire line
of text. To avoid the stray points/artifacts in pre-
dicted stroke points, we employ a marginal Chamfer
distance that penalizes large, easily noticeable devi-
ations and artifacts. 3) We also introduce an algo-
rithm for evaluating the STR system on images with-
out ground truth stroke points. 4) Since our method
works with words, we demonstrate that our method
is scalable to unconstrained handwritten documents,
i.e., full-page text. 5) The quantitative and qualitative
results demonstrate the superior performance of our
approach in comparison to the state-of-the-art (SOTA)
methods.
We introduce the proposed method in Sec. 2 and
demonstrate the experimental results in Sec. 3.
2 METHOD
2.1 Network Architecture
We deploy a CNN with bidirectional LSTM for stroke
trajectory learning. The input to the CNN is a word
image resized to a fixed height with variable width to
keep the same aspect ratio. A CNN branch consists
of seven convolutional blocks with ReLU activation.
The convolutional filters have a 3x3 kernel size with
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
662
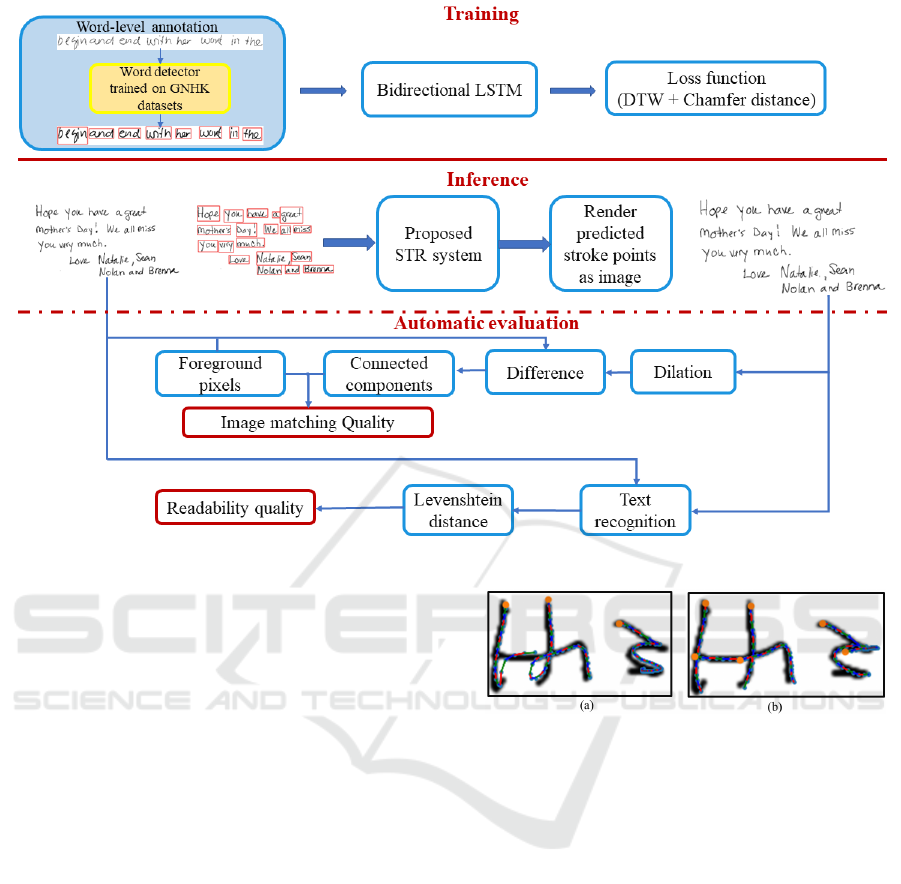
Figure 1: The block diagram of the overall system for training, inference, and automatic evaluation.
2x2 and 2x1 max pooling in each layer. The output
of the CNN branch, a Wx1024 dimensional feature
vector, where W is the width of the image, is fed into
eight bidirectional LSTM blocks. Each bidirectional
LSTM block consists of 128 hidden units, so each
LSTM block’s input is Wx128. Lastly, a bidirectional
LSTM is followed by a 1-D convolutional block that
predicts a Wx4-dimensional output. The number of
output points is proportional to the width of the input
image.
The first two dimensions of the output indicate the
relative coordinates (x,y) with respect to the previous
location. The last two dimensions indicate start-of-
stroke (sos) and end-of-stroke (eos) tokens, respec-
tively. Cross-entropy loss is employed to learn the
start-of-stroke and end-of-stroke tokens. The overall
architecture is shown in Fig. 1.
2.2 Loss Function
The ground truth in IAM-online dataset (Marti and
Bunke, 2002) is a sequence of points defined as (x, y)
coordinates with a time stamp. Since the number of
predicted coordinates is propositional to the width of
the input image, we re-sample the equidistant ground-
truth coordinates such that the number of points is
proportional to the image’s width.
Figure 2: The impact of marginal Chamfer distance loss on
the stroke trajectory recovery. (a) DTW loss only. (b) DTW
+ Chamfer distance loss.
2.2.1 Dynamic Time Warping (DTW) Loss
In general, DTW (Berndt and Clifford, 1994) com-
putes the optimal match between ground-truth (GT)
(T = (t
1
,t
2
,t
3
,....t
m
)) and predicted sequences (P =
(p
1
, p
2
, p
3
,....p
n
)) of different lengths by finding the
warping path between two sequences. In DTW loss,
the cost matrix is calculated as:
cost(i, j) = ||p
i
−t
j
||
2
(1)
The accumulative cost matrix (A) is given as,
A(i, j) = cost(i, j) + min[A(i − 1, j),A(i −1, j − 1),
A(i, j − 1)]
(2)
(3)
for 1 ≤ i ≤ n and 1 ≤ j ≤ m.
Given matrix A, DTW computes the optimal
warping path from A(n, m) to A(1,1) as the alignment
of points in P to points in T is expressed as index map-
ping α : {1, .. .,n} → {1,...,m}, where α is an onto
Strokes Trajectory Recovery for Unconstrained Handwritten Documents with Automatic Evaluation
663

function.
L
DTW
(P,T) =
n
∑
i=1
||p
i
−t
α(i)
||. (4)
2.2.2 Chamfer Distance Loss
The DTW gives promising results for training the
stroke trajectory recovery systems (Archibald et al.,
2021). It helps to match the point trajectory for
ground truth and predicted strokes. However, the
DTW loss function does not impose a sufficiently
large penalty for predicted points following a similar
trajectory as the ground truth points but far off com-
pared to the ground truth at the pixel level. Fig. 2(a)
shows that the predicted and ground truth points are
far off, but the DTW loss is small since the predicted
strokes follow the same trajectory as a ground truth
stroke. Therefore, in this work, we propose to add a
marginal Chamfer distance. Its effect is illustrated in
Fig. 2(b). The proposed marginal Chamfer distance
between the predicted and ground truth point sets is
given by
d
CD
(P,T) =
∑
p∈P
max(min
g∈T
∥p − g∥
2
2
) − c
2
,0) + (5)
∑
g∈T
max(min
p∈P
∥g − p∥
2
2
) − c
2
,0), (6)
where P and T represent the point sets for predicted
and ground truth strokes. The Chamfer distance
is calculated on the pixel level. In the experimen-
tal section, we will discuss the setting of parameter
c. The intuition behind the marginal Chamfer dis-
tance for STR is to consider the distance only if the
predicted stroke point is at least a unit pixel apart
from its nearest ground-truth stroke point. It leads
to quantitative improvements in loss calculations as
shown in Table 2. The proposed loss is simply a sum
L
DTW
(P,T) + d
CD
(P,T)
2.3 Automatic Evaluation
In the previous stroke trajectory recovery evaluation
system, we computed the distance between ground-
truth stroke points and predicted stroke points. For
this purpose, we require the ground truth strokes’
coordinate information to compute the difference.
However, adding the coordinates information is ex-
tra work and requires extensive labor. Moreover,
the existing handwriting datasets have limited avail-
ability of stroke coordinates information. Hence, al-
though the proposed system can be applied to hand-
writing datasets without stroke coordinates informa-
tion, it is impossible to evaluate the quality of its pre-
dicted strokes using the existing methods. Therefore,
we propose two measures for evaluating the quality of
recovered stroke trajectories when ground truth stroke
information is not given, namely image matching and
readability.
2.3.1 Image Matching
The LSTM predicts the stroke trajectory recovery
point coordinates (x,y). We digitize the obtained
strokes (X, Y) by plotting the points (x,y) and con-
structing a digital image from all the recovered stroke
points (X, Y). As we compare the original and recon-
structed image, the dimensions of the reconstructed
image are the same as the original image. However,
since the text is plotted with unit thickness, the thick-
ness of the text in the input and reconstructed image
differs. To overcome this issue, we propose dilating
the reconstructed images so that the thickness of the
text in the input and the reconstructed image are the
same. We dilate for the kernel size ranging from 0 to
10 and select the kernel size that yields the least num-
ber of pixels in the absolute difference between the
input and dilated images. Let I
input
be the input hand-
written text image, and let I
predict
denote the image
reconstructed from the coordinates of stroke points
predicted by LSTM. I
predict
is reconstructed by dig-
italizing the predicted stroke trajectory as described
in Sec. 4.2. Hence all the words in I
predict
are one
pixel thick.
Next, we dilate I
predict
with a dilation kernel k ∈
(1,10), and denote the dilated image with kernel k
as D(I
predict
,k). We compare two digital images by
computing their symmetric difference as
I
Di f f (k)
= |I
input
− D(I
predict
,k)|. (7)
We define I
Di f f
as the image I
Di f f (k)
with the min-
imum number of foreground pixels for k ∈ (0,10).
This allows for estimating the thickness of the input
text in the reconstructed image.
Next, we check the quality of the reconstructed
image I
Di f f
by performing connected component
analysis. Let C be the largest connected component
in I
Di f f
image. The ratio of the number of foreground
pixels in C to the total number of foreground pixels in
I
input
gives us the error in the stroke trajectory predic-
tion, which is denoted as ε. This value can be used as
a quantitative measure of the predicted strokes. Em-
pirically, we observed that if the error ε is less than
the threshold (T = 0.025), then the quality of stroke
trajectory recovery is good and vice versa.
The intuition of the proposed method is that the
image I
Di f f
has small scattered connected compo-
nents if stroke trajectory recovery is good. However,
the I
Di f f (k)
image has large and quite noticeable con-
nected components if stroke trajectory recovery is of
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
664
poor quality. The example of good and poor stroke
trajectory recovery validated by the proposed method
is shown in Fig. 8.
2.3.2 Readability
The second part of the automatic evaluation checks
the preservation of the readability of the input text and
the text from the recovered handwriting trajectory. To
verify that the recovered stroke trajectory is read the
same as the input handwriting word, we recognize the
characters in both images. Let I
i
and I
r
be the two im-
ages for word from the input handwriting image and
the one recovered from the proposed stroke trajectory
recovery method, respectively. The text recognition
on I
i
and I
r
gives us the string of characters for input
word denoted by W
i
= [w
1
,w
2
,..., w
m
] and the string
characters from recovered stroke trajectory denoted
by W
r
= [w
1
,w
2
,..., w
n
], where m and n are the to-
tal character recognized in I
i
and I
r
. We utilize the
pre-trained text recognition network (Li et al., 2021)
to compute W
i
and W
r
. The difference between the
two recognized strings is computed by the edit dis-
tance between the two strings. In our work, we com-
pute the edit distance between two strings W
i
and W
r
with Levenshtein distance. Let the Levenshtein dis-
tance between two strings be d
lev
and the number of
characters in input string W
i
is m. The readability
error R is defined as d
lev
/m, that is, the ratio of incor-
rect string matching to the total number of characters
in the input string. Ideally, the Levenshtein distance
(d
lev
) and readability error (R ) are expected to be zero
for good stroke trajectory recovery. Empirically, we
noticed that the R less than T = 0.1 results in satis-
factory reconstruction, which we define as acceptable
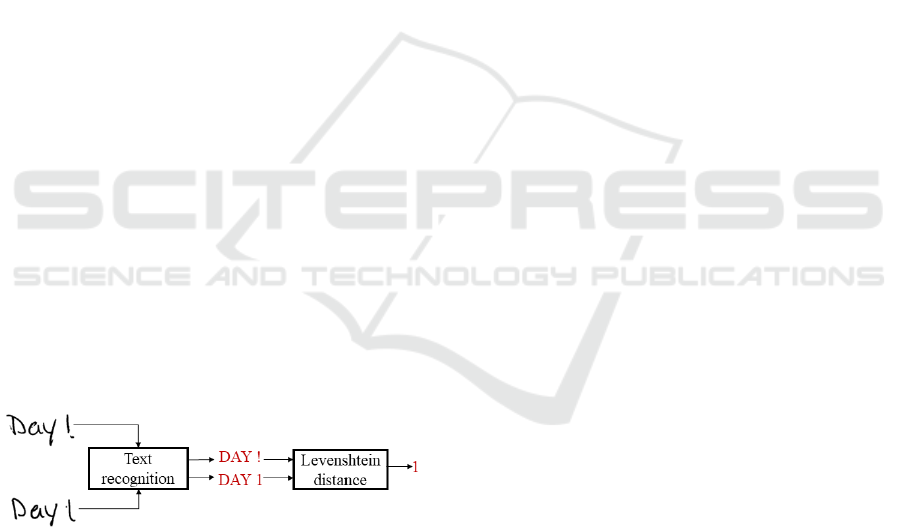
readability. This process is illustrated in Fig. 3.
Figure 3: The readability module based on text recognition
(Li et al., 2021) utilized for our automatic evaluation. The
top-left text is the input and the bottom-left text is recon-
structed from predicted stroke trajectory recovery.
3 EXPERIMENTS
We first present the construction of word-level anno-
tations for IAM-online dataset (Sec. 3.1) and intro-
duce the greeting-card handwritten messages (GHM)
dataset (3.1.1). We discuss the evaluation metric
and results of the proposed method on these datasets
(Secs. 3.2 and 4). Finally, we present the application
of our proposed method for the GHM dataset (Sec.
4.2).
3.1 Word-Level Annotation
In the IAM-online dataset (Marti and Bunke, 2002),
the stylus pen movement on an electronic device’s
screen provides the coordinates of the ground-truth
point for stroke trajectory recovery. However, the
IAM-online dataset only provides the stroke’s ground
truth for the line-level text. Therefore, we use word
detection to construct stroke annotations for words.
Word detection generally requires word bounding
boxes to train the detection network, but the IAM-
online dataset does not include word bounding boxes.
So, we propose to train the word detection on GNHK
(Lee et al., 2021) dataset and then applied to the IAM-
online dataset. The images in the GNHK dataset
are sourced from different regions of Europe, North
America, Africa, and Asia containing 39k+ words,
sufficient to train a word detector with data augmenta-
tion (Bochkovskiy et al., 2020). Hence, it is a diverse
dataset regarding writing style and image quality as
the penmanship varies in different parts of the world,
and camera quality varies for each captured image.
We explore three state-of-the-art detectors; one
scene text detector (Baek et al., 2019) and two object
detectors for localizing the words in unconstrained
handwritten text. A scene text detection network
identifies character regions in natural images and de-
tects the words based on character regions and affinity
scores between them (Baek et al., 2019). However,
the deterministic approach to constructing bound-
ing boxes around character region scores is not well
suited for handwriting word detection. Because in
the handwritten text, adjacent lines may overlap, and
characters may have high affinity scores in adjacent
lines, which misleads the word detection results. This
shortcoming of the scene text detector gives low de-
tection accuracy for unconstrained handwritten text
(as shown in Fig. 5).
On the other hand, the object detector attributes
words as objects and is more efficient for detect-
ing overlapping words in adjacent lines in a non-
horizontal orientation. For our task, a single-stage
detector YOLO (Bochkovskiy et al., 2020) performs
better than a two-stage detector Faster R-CNN (Ren
et al., 2015; Hanif et al., 2019; Hanif and Latecki, ).
Both are trained and evaluated on GNHK dataset (Lee
et al., 2021). In Table 1, we list the quantitative re-
sults for word detection on GNHK dataset. Due to its
best performance, we select the single-stage YOLO
word detector (Bochkovskiy et al., 2020) and apply
Strokes Trajectory Recovery for Unconstrained Handwritten Documents with Automatic Evaluation
665

Table 1: The accuracy (mAP) of word detection with state-of-the-art scene text detector (Baek et al., 2019) and single and
two-stage object detectors (Ren et al., 2015; Bochkovskiy et al., 2020).
Method mAP@0.5 mAP@0.5:0.95
Scene text detector (Baek et al., 2019) 0.603 0.565
Two-stage word detector (Ren et al., 2015) 0.780 0.565
Single-stage word detector (Bochkovskiy et al., 2020) 0.913 0.619
it to IAM-online dataset (Marti and Bunke, 2002) for
word detection.
Figure 4: (a) Word detection for the GNHK dataset (Lee
et al., 2021), (b) word detection for IAM-online dataset
(Marti and Bunke, 2002), (c) Words from IAM-online
dataset used to train our network.
In Fig. 4(a,b), we show the word detection vi-
sualization for sample images from GNHK dataset
(Lee et al., 2021) and IAM-online dataset (Marti
and Bunke, 2002) respectively. The images in
GNHK (Lee et al., 2021) vary in handwriting style,
background, and camera conditions. Therefore, the
word detection trained in GNHK dataset (Lee et al.,
2021) has acceptable performance for the IAM-online
dataset (Marti and Bunke, 2002). We used the word-
level annotations for the IAM-online dataset (Marti
and Bunke, 2002) to finetune and evaluate our sys-
tem. Word detection on the IAM-online dataset gives
us 41,665 and 19,496 words for train and test sets, re-
spectively. Fig. 4(b) shows the word detection from
lines from IAM-online, and Fig. 4(c) shows the words
used in our work to train the network.
3.1.1 Greeting Card Messages Dataset
In our work, we propose a word-level stroke trajectory
recovery.
To evaluate our system on unlabelled handwritten
documents, we acquire approximately 2,000 greeting-
cards handwritten messages (GHM) dataset from
greeting cards company (Signed, 2022). The GHM
dataset shared
1
. Handwritten messages from the
GHM dataset do not follow any fixed template be-
cause it consists of user-uploaded handwritten mes-
sages to greeting cards company (Signed, 2022). The
1
https://drive.google.com/file/d/1G-EZBfEhsHThR9d
R1YtJdPE3Mg0ay0w-/view?usp=sharing
samples from the GHM dataset are shown in Fig. 5.
Figure 5: Sample documents form GHM dataset with unla-
belled handwriting images.
3.2 Evaluation Metric
We used a distance-based evaluation metric to evalu-
ate stroke trajectory recovery. The average distance
of points in the ground-truth (T) stroke to its nearest
predicted stroke (P) is denoted by dist
t,p
. Similarly,
the average distance of points in the predicted stroke
(P) to its nearest ground-truth stroke (T) is denoted by
dist
p,t
. The metric dist
t,p
signifies that every ground-
truth stroke point is close to the predicted point and
vice versa for dist
p,t
. dist
t,p
and dist
p,t
are the same
evaluation metrics as used in (Archibald et al., 2021).
However, apart from the mean (mean) of the distances
between predicted and ground truth stroke points, we
also compute the standard deviation (std) of the met-
rics. We also compute the loss for predicting the start-
of-stroke token ε
sos
. ε
sos
should have the lowest value
if the start-of-stroke token is predicted correctly.
4 RESULTS
DTW and Chamfer distance are complementary loss
functions to train our system. DTW loss ensures
that the predicted stroke sequences are similar to the
ground truth stroke sequence. The Chamfer distance
between the predicted and ground truth point set en-
sures that there are no spurious points/artifacts in pre-
dicted points; that is, no predicted points are far away
from ground truth points.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
666

Table 2: The quantitative comparison for training on DTW loss for lines and words. The third row lists the quantitative results
for training with combined DTW and Chamfer distance loss between predicted and ground-truth points.
Loss function
dist
t,p
(mean)
dist
t,p
(std)
dist
p,t
(mean)
dist
p,t
(std)
ε
sos
DTW
line
(Archibald et al., 2021) 0.01558 0.01402 0.02776 0.0353 0.1553
DTW
word
0.01653 0.014862 0.01287 0.00965 0.1427
DTW
word
+ Chamfer distance 0.01492 0.01042 0.01257 0.00946 0.1479
Table 3: The quantitative comparison of increasing the value of c from 1 to 3.
Loss function
dist
t,p
(mean)
dist
t,p
(std)
dist
p,t
(mean)
dist
p,t
(std)
c = 1 0.01492 0.01042 0.01257 0.00946
DTW
word
+ Chamfer distance
c = 3 0.0177 0.0118 0.01859 0.0162
4.1 IAM-Online Dataset
Table 2 presents a quantitative comparison, where
bold numbers show the best results (lowest value).
The first and second rows of Table 2 show the eval-
uation with line-level and word-level input for DTW
loss, respectively. We observe that both dist
t,p
and
dist
p,t
metrics are much lower for word-level than the
line-level input. These results show that training the
stroke trajectory recovery with a word-level dataset,
as we proposed, improves the results. We also val-
idated that Chamfer distance loss for predicted and
ground truth point sets improves the quantitative re-
sults. Both mean and standard deviation of dist
p,t
and dist
t,p
decrease by adding Chamfer distance to
the loss function. It means that the predicted strokes
are better at imitating the ground-truth strokes. The
lower values of both dist
t,p
and dist
p,t
illustrate that
every ground-truth stroke has a close predicted stroke
and vice versa. So, we do not get spurious predicted
strokes and yet do not miss to follow the shape of
the ground-truth strokes. We noticed that chamfer
distance loss has minimal influence on start-of-stroke
(ε
sos
) as shown in Table 2. In another experiment, we
try the higher values of c (Eq. 6) as shown in Table
3, but by increasing the value of c increases the std
of dist
t,p
and dist
p,t
. Therefore, we keep the value of
c=1 in our work.
The visualization of the elimination of spurious
predicted points/artifacts from the predicted stroke
trajectory by adding Chamfer distance loss is illus-
trated in Fig. 6. We can see that extra stroke points
cause more artifacts in (a) than in (b).
4.2 Greeting Cards Messages Dataset
The previous methods on the IAM-online dataset
work with line-level text for stroke trajectory recovery
(Archibald et al., 2021), which is not scaleable to un-
Figure 6: Samples of stroke trajectory recovery with (a)
DTW loss and (b) DTW loss with Chamfer distance on the
predicted and ground truth point sets. The recovered stroke
trajectory is shown by red, blue, and green arrows, and the
predicted start-of-stroke point is shown as an orange circle
(best view in colored).
constrained handwritten text images without line de-
tection. This is one of the main reasons why we work
with word-level text.
In one of the applications of the proposed work,
we show the stroke trajectory recovery for greeting-
card handwritten messages (Signed, 2022). We ap-
plied the developed method trained for word-level an-
notation using DTW and Chamfer distance to the im-
ages containing greeting-card handwritten messages.
Handwriting images from greeting card messages do
not follow any fixed template because they consist of
user-uploaded handwritten messages. Therefore, first,
we detect the words in greeting card handwritten mes-
sages with word detector described in Sec. 3.1. Then
we execute the trained STR model on each detected
word. The recovery of stroke trajectory for greeting
card handwritten messages is the word-level stroke
trajectory recovery of each word.
We render the image from predicted stroke points
as described in Fig . 7, where the proposed STR sys-
tem predicts the stroke trajectory recovery for each
word. Whereas the render image module converts
stroke points into an image. Finally, we align the ren-
dered image to the location of the detected word.
The visual results of the proposed word-level STR
system on handwritten greeting card messages as
Strokes Trajectory Recovery for Unconstrained Handwritten Documents with Automatic Evaluation
667

Figure 7: The mechanism of image rendering from pre-
dicted stroke points.
shown in Fig. 9 are rendered word-wise by the im-
age render module illustrated in Fig. 7. Our proposed
STR system can easily be applied to text with differ-
ent orientations, as shown in Fig. 9. The left-hand
images are input handwritten messages, and the right-
hand images are rendered from the recovered stroke
trajectory for each word.
4.2.1 Automatic Evaluation
We also applied the proposed automated evaluation
method to the GHM dataset. In Fig. 8, we show the
input handwritten messages, the dilated image, and
connected components for I
Di f f
. The recovered im-
age is dilated to match the width of the words in the
input handwriting image as described in Sec. 2.3.1.
According to the criteria defined in Sec. 2.3.1, the
Fig. 8(top) example shows the good stroke trajec-
tory recovery with small scattered connected compo-
nents. Whereas, Fig. 8(bottom) shows the poor stroke
trajectory recovery as there are larger connected com-
ponents in the difference image I
Di f f
.
In Table 4, we listed the accuracy of the image
matching and readability-based evaluation proposed
in our work. The first column in Table 4 shows
the percentage of documents with correctly recov-
ered stroke trajectories according to our two proposed
quality measures. According to the thresholds de-
fined in Sec 2.3.1 and Sec. 2.3.2, the accuracy of
stroke recovery from image matching and readability
is 24.30% and 24.76%, respectively.
We manually verified the accuracy with user scor-
ing.
If the threshold defined in image matching and
readability evaluation classifies the image from the re-
covered stroke trajectory as satisfactory and the user
also gives a satisfactory score to the recovered image,
then a confidence score of 1 is assigned to that recon-
struction. The average confidence score (con f idence)
for all the images is computed. The user scores the
image in binary, scoring either 0 or 1. We applied
this binary criterion to evaluate the robustness of the
thresholds defined in Sec. 2.3.1 and Sec. 2.3.2. The
accuracy of image matching and readability with the
confidence score (con f idence) are listed in Table 4.
Our observation shows that the automatic evaluation
Figure 8: The input image, dilated image (after dilation is
applied to the recovered image), and the difference of the
input and dilated images.
based on image matching is a better evaluation mea-
sure than the readability evaluation. One of the rea-
sons is that the text recognizer can correctly recognize
words even if they are visually dissimilar to the input
handwritten words.
Table 4: The quantitative analysis of automatic evaluation
on greeting cards handwritten messages (Signed, 2022).
Method Accuracy Confidence
Image matching 24.30% 74.0%
Readability evaluation 24.76% 53.8%
5 CONCLUSIONS
In our proposed work, we trained a neural net-
work with word-level annotations for the IAM-online
dataset using DTW and Chamfer distance loss func-
tions. We demonstrated that adding Chamfer distance
loss to DTW is beneficial for removing artifacts and
spurious stroke points for better stroke trajectory re-
covery. We also proposed automatic evaluation meth-
ods using image matching and readability consistency
to evaluate the quality of stroke trajectory recovery for
unlabeled datasets. Finally, we demonstrate the abil-
ity of our proposed work to work in unconstrained
practical applications by applying and evaluating it
on an unlabeled handwriting greeting card messages
dataset.
ACKNOWLEDGEMENT
We would like to thank Signed Inc. for funding this
work. The calculations were carried out on HPC
resources at Temple University, supported in part
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
668
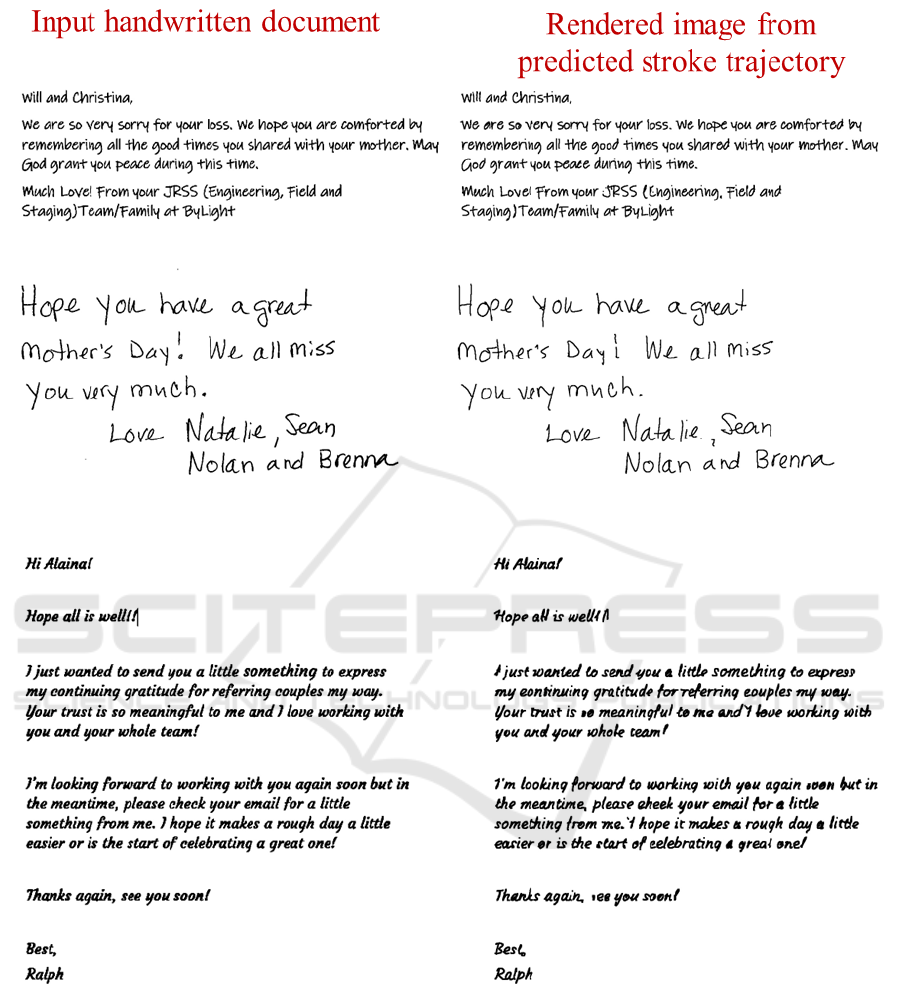
Figure 9: The input image and the rendered image from predicted stroke trajectory recovery for GHM dataset.
by the NSF through grant number 1625061 and by
the U.S. ARL under contract number W911NF-16-2-
0189. We would also like to thank the undergraduate
student Abdulrahman Samir Alshehri for cleaning the
dataset for the handwritten documents
REFERENCES
Akmal Butt, M. and Maragos, P. (1998). Optimum design
of chamfer distance transforms. IEEE Transactions on
Image Processing, 7(10):1477–1484.
Alberti, M., V
¨
ogtlin, L., Pondenkandath, V., Seuret, M., In-
gold, R., and Liwicki, M. (2019). Labeling, cutting,
grouping: an efficient text line segmentation method
Strokes Trajectory Recovery for Unconstrained Handwritten Documents with Automatic Evaluation
669

for medieval manuscripts. In 2019 International Con-
ference on Document Analysis and Recognition (IC-
DAR), pages 1200–1206. IEEE.
Archibald, T., Poggemann, M., Chan, A., and Martinez, T.
(2021). Trace: A differentiable approach to line-level
stroke recovery for offline handwritten text. arXiv
preprint arXiv:2105.11559.
Baek, Y., Lee, B., Han, D., Yun, S., and Lee, H. (2019).
Character region awareness for text detection. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 9365–9374.
Barakat, B. K., El-Sana, J., and Rabaev, I. (2019). The
pinkas dataset. In 2019 International Conference on
Document Analysis and Recognition (ICDAR), pages
732–737. IEEE.
Berndt, D. J. and Clifford, J. (1994). Using dynamic time
warping to find patterns in time series. In KDD work-
shop, volume 10, pages 359–370. Seattle, WA, USA:.
Bhunia, A. K., Bhowmick, A., Bhunia, A. K., Konwer, A.,
Banerjee, P., Roy, P. P., and Pal, U. (2018). Hand-
writing trajectory recovery using end-to-end deep
encoder-decoder network. In 2018 24th International
Conference on Pattern Recognition (ICPR), pages
3639–3644. IEEE.
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. arXiv preprint arXiv:2004.10934.
Boillet, M., Kermorvant, C., and Paquet, T. (2021). Mul-
tiple document datasets pre-training improves text
line detection with deep neural networks. In 2020
25th International Conference on Pattern Recognition
(ICPR), pages 2134–2141. IEEE.
Demır, A. A.,
¨
OzS¸eker,
˙
I., and
¨
Ozkaya, U. (2021). Text line
segmentation in handwritten documents with genera-
tive adversarial networks. In 2021 International Con-
ference on INnovations in Intelligent SysTems and Ap-
plications (INISTA), pages 1–5. IEEE.
Diaz, M., Crispo, G., Parziale, A., Marcelli, A., and Ferrer,
M. A. (2022). Writing order recovery in complex and
long static handwriting.
Faundez-Zanuy, M., Fierrez, J., Ferrer, M. A., Diaz, M.,
Tolosana, R., and Plamondon, R. (2020). Hand-
writing biometrics: Applications and future trends
in e-security and e-health. Cognitive Computation,
12(5):940–953.
Gader, T. B. A. and Echi, A. K. (2020). Unconstrained
handwritten arabic text-lines segmentation based on
ar2u-net. In 2020 17th International Conference on
Frontiers in Handwriting Recognition (ICFHR), pages
349–354. IEEE.
Gader, T. B. A. and Echi, A. K. (2022). Deep learning-
based segmentation of connected components in ara-
bic handwritten documents. In International Confer-
ence on Intelligent Systems and Pattern Recognition,
pages 93–106. Springer.
Guyon, I., Schomaker, L., Plamondon, R., Liberman, M.,
and Janet, S. (1994). Unipen project of on-line data
exchange and recognizer benchmarks. In Proceed-
ings of the 12th IAPR International Conference on
Pattern Recognition, Vol. 3-Conference C: Signal Pro-
cessing (Cat. No. 94CH3440-5), volume 2, pages 29–
33. IEEE.
Hanif, S. and Latecki, L. J. Autonomous character region
score fusion for word detection in camera-captured
handwriting documents.
Hanif, S., Li, C., Alazzawe, A., and Latecki, L. J. (2019).
Image retrieval with similar object detection and local
similarity to detected objects. In Pacific Rim Inter-
national Conference on Artificial Intelligence, pages
42–55. Springer.
Kurar Barakat, B., Cohen, R., Droby, A., Rabaev, I., and
El-Sana, J. (2020). Learning-free text line segmen-
tation for historical handwritten documents. Applied
Sciences, 10(22):8276.
Lee, A. W., Chung, J., and Lee, M. (2021). Gnhk: A dataset
for english handwriting in the wild. In International
Conference on Document Analysis and Recognition,
pages 399–412. Springer.
Li, M., Lv, T., Cui, L., Lu, Y., Florencio, D., Zhang, C.,
Li, Z., and Wei, F. (2021). Trocr: Transformer-based
optical character recognition with pre-trained models.
arXiv preprint arXiv:2109.10282.
Liu, C.-L., Yin, F., Wang, D.-H., and Wang, Q.-F.
(2011). Casia online and offline chinese handwriting
databases. In 2011 International Conference on Doc-
ument Analysis and Recognition, pages 37–41. IEEE.
Marti, U.-V. and Bunke, H. (2002). The iam-database:
an english sentence database for offline handwrit-
ing recognition. International Journal on Document
Analysis and Recognition, 5(1):39–46.
Nguyen, H. T., Nakamura, T., Nguyen, C. T., and
Nakawaga, M. (2021). Online trajectory recovery
from offline handwritten japanese kanji characters of
multiple strokes. In 2020 25th International Con-
ference on Pattern Recognition (ICPR), pages 8320–
8327. IEEE.
Plamondon, R. and Srihari, S. N. (2000). Online and off-
line handwriting recognition: a comprehensive survey.
IEEE Transactions on pattern analysis and machine
intelligence, 22(1):63–84.
Privitera, C. M. and Plamondon, R. (1995). A system for
scanning and segmenting cursively handwritten words
into basic strokes. In Proceedings of 3rd International
Conference on Document Analysis and Recognition,
volume 2, pages 1047–1050. IEEE.
Rabhi, B., Elbaati, A., Boubaker, H., Hamdi, Y., Hussain,
A., and Alimi, A. M. (2021). Multi-lingual character
handwriting framework based on an integrated deep
learning based sequence-to-sequence attention model.
Memetic Computing, 13(4):459–475.
Rabhi, B., Elbaati, A., Boubaker, H., Pal, U., and Alimi,
A. (2022). Multi-lingual handwriting recovery frame-
work based on convolutional denoising autoencoder
with attention model.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
670

Senatore, R., Santoro, A., Parziale, A., and Marcelli, A.
(2022). A biologically inspired approach for recov-
ering the trajectory of off-line handwriting.
Signed (2022).
Surinta, O., Holtkamp, M., Karaaba, M. F., van Oosten, J.,
Schomaker, L. R. B., and Wiering, M. A. (2014a).
A* path planning for line segmentation of handwrit-
ten documents. In Frontiers in Handwriting Recog-
nition (ICFHR), 2014 14th International Conference
on, pages 175–180. IEEE.
Surinta, O., Holtkamp, M., Karabaa, F., Van Oosten, J.-P.,
Schomaker, L., and Wiering, M. (2014b). A path plan-
ning for line segmentation of handwritten documents.
In 2014 14th international conference on frontiers in
handwriting recognition, pages 175–180. IEEE.
Viard-Gaudin, C., Lallican, P.-M., and Knerr, S. (2005).
Recognition-directed recovering of temporal informa-
tion from handwriting images. Pattern Recognition
Letters, 26(16):2537–2548.
Viard-Gaudin, C., Lallican, P. M., Knerr, S., and Binter,
P. (1999). The ireste on/off (ironoff) dual handwrit-
ing database. In Proceedings of the Fifth Interna-
tional Conference on Document Analysis and Recog-
nition. ICDAR’99 (Cat. No. PR00318), pages 455–
458. IEEE.
Yavariabdi, A., Kusetogullari, H., Celik, T., Thummana-
pally, S., Rijwan, S., and Hall, J. (2022). Cardis:
A swedish historical handwritten character and word
dataset. IEEE Access, 10:55338–55349.
Strokes Trajectory Recovery for Unconstrained Handwritten Documents with Automatic Evaluation
671
