
Incident-Aware Distributed Signal Systems in Self-Organised Traffic
Control Systems
Sven Tomforde
a
, Yanneck Ohl and Ingo Thomsen
b
Intelligent Systems, Kiel University, 24118 Kiel, Germany
Keywords:
Traffic Management, Organic Traffic Control, Progressive Signal Systems, Green Waves, Incident Detection,
Self-Organisation.
Abstract:
Traffic congestion is a major contributor to carbon dioxide emissions and causes air pollution which poses
various health risks. In response to such challenges, traffic management systems are becoming increasingly
intelligent and adaptive. Particularly self-organised approaches such as the Organic Traffic Control (OTC)
system offer additional advantages such as efficiency, scalability, and robustness. In addition to the local and
traffic-dependent switching of traffic signals, a central task of such a system is the coordinated adaptation of
traffic lights by means of Progressive Signal Systems. In this paper, we present a novel approach for estab-
lishing decentralised PSSs that takes into account recognised incidents and thus proactively ensures optimised
traffic flows. We develop three different strategies and evaluate them using realistic simulations.
1 INTRODUCTION
After a decline during the COVID crisis, the traffic
demands in urban areas have increased again, and
congestion and traffic disruption cause major eco-
nomic damage every year. Furthermore, it is often not
feasible to expand the existing infrastructure which
presents an additional challenge. Apart from a politi-
cally motivated reduction of traffic volumes, the only
possible countermeasure is a more efficient utilisation
of the existing infrastructure.
In addition to the traffic-dependent and proactive
adaptation of traffic lights or routing solutions, Pro-
gressive Signal Systems (PSS, also known as “green
waves”) are a key factor for optimisation. Currently
there are time-based static as well as centralised and
decentralised dynamic solutions. However, these are
not geared towards detected incidents within the un-
derlying inner-city road network.
Building on existing work on self-organised and
self-adaptive traffic management – the OTC system,
(Sommer et al., 2016a) – this article explores a
novel approach to an incident-aware establishment
and maintenance of PSSs. We propose a correspond-
ing algorithm that can handle different levels of infor-
mation about incidents, and demonstrate that it can
a
https://orcid.org/0000-0002-5825-8915
b
https://orcid.org/0000-0002-0850-4786
improve traffic flow compared to conventional PSS
approaches.
The remainder of this paper is organised as fol-
lows: Section 2 provides a brief discussion of the
state-of-the-art. After that, Section 3 presents the de-
veloped approach for incident-aware PSS. Section 4
analyses the behaviour of the approach in close-to-
reality simulations and assesses the benefit in com-
parison to alternatives. Finally, Section 5 summarises
the paper and gives an outlook on future work.
2 BACKGROUND
This section describes the underlying related work,
specifically in the context of self-organised traffic
control, automated incident detection, and progres-
sive signal systems. It also introduces the OTC sys-
tem as the basis of this work.
2.1 Self-Organised Traffic Control
Urban traffic light control is usually done via traf-
fic control centres, with SCOOT (Robertson and
Bretherton, 1991), SCATS (Sims and Dobinson,
1980), MOVA (Vincent et al., 1990), and UTOPIA/-
SPOT (Mauro and Taranto, 1990) as the most promi-
nent systems used world-wide. All of these ap-
Tomforde, S., Ohl, Y. and Thomsen, I.
Incident-Aware Distributed Signal Systems in Self-Organised Traffic Control Systems.
DOI: 10.5220/0011705900003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 15-26
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
15

proaches establish a centralised control loop that col-
lects the current traffic conditions and adapts the
switching policies of the distributed intersection con-
troller (IC). Typically, this adaptation is based on a
certain cost function including aspects such as the ex-
pected travel times, emissions, or public transport pri-
ority. An overview and comparison of approaches can
be found in (Studer et al., 2015).
These centralised approaches all are limited in
terms of efficiency, scalability, and robustness as all
information has to be passed to and collected by a one
central controller. It then has to conduct the optimisa-
tions and distribute the derived plans to the ICs.
As a response, self-adaptive and self-organised
(SASO) approaches with a local scope have been de-
veloped that perform decisions locally at each inter-
section controller and – in some cases – communi-
cate with each other to achieve coordinated decisions.
Examples include a multi-agent approach based on
fuzzy control as presented in (Gokulan and Srini-
vasan, 2010), a distributed W-learning concept to op-
timise a phase-oriented signal control as discussed
in (Dusparic and Cahill, 2009), or a model with pre-
dictive control as proposed by (Oliveira and Cam-
ponogara, 2010). The drawback of these approaches
compared to the centralised one is that they are mostly
of academic interest and just tested in simulations.
The third class of concepts is even more theoret-
ical as it eliminates the standard phase-based traffic
signal switching schemes: A fluid-dynamic model,
discussed in (Helbing et al., 2005), uses waiting ve-
hicles as pressure and counter-pressure for switching
traffic lights policies. In contrast to the SASO con-
cepts above, these control systems cannot consider
further knowledge or coordinate their decisions as the
model primarily reacts to local queues.
2.2 Progressive Signal Systems
Some of the aforementioned traffic control systems
possess abilities to determine coordination plans for
ICs, resulting in centrally planned PSS schemes. As
an alternative self-organised approaches have been
proposed. However, these are again mostly of an aca-
demic nature. One example presented in (Gershen-
son, 2007) is called “self-organising traffic lights”
(SOTL). The approach does not explicitly establish
a PSS but relies on traffic-responsive local controllers
that take into account the number of waiting cars or
the gaps between arriving vehicles. This behaviour
is similar to uncoordinated traffic-adaptive controllers
(e.g. following the NEMA standard). Traffic lights
keep a count κ of the number of cars waiting in front
of them. Each car is weighted by its waiting time and
as soon as κ reaches a certain threshold, the traffic
light changes. The SOTL control method employs
several restrictions to avoid fast switching of traf-
fic lights, the interruption of moving platoons, and
deadlocks caused by long platoons. Although there
is no explicit coordination, Gershenson describes the
observation of coordination effects similar to those
achieved by PSSs.
As an alternative, Bazzan described an approach
to distributed traffic signal coordination in (Baz-
zan, 2005). Here, intersections are modelled as
individually-motivated agents. Each agent possesses
a set of predefined control strategies to choose from.
The selection process is based on local events occur-
ring at the intersection as well as on the results of
“coordination games” that are played among neigh-
bouring agents. The principal applicability of this
approach is demonstrated in a simple scenario of an
arterial road consisting of ten intersections. Each in-
tersection agent has to choose between two strategies,
each of which favours one of the two directions over
the other. The distributed approach is compared to
a central controller that creates synchronised traffic
lights in one of the arterial directions, based on de-
tector readings from the network. The agent-based
approach proves to be better in situations where the
flow of traffic in opposite directions is nearly equal.
An important difference between Bazzan’s approach
and the organic system presented here is that Bazzan
relies solely on the selection of predetermined strate-
gies while the approach presented here is able to gen-
erate new strategies dynamically.
2.3 Traffic Incident Detection
Techniques for automatic recognition of incidents, ac-
cidents, and other road events, e.g. requiring emer-
gency responses, have been the focus of research for
more than three decades. Most of the resulting al-
gorithms rely on sensor data from loop detectors.
Chronologically, AID research started with the Stan-
dard Normal Deviate algorithm (Dudek et al., 1974),
subsequently followed by the California Algorithm
family (Payne, 1975; Payne and Tignor, 1978). These
techniques essentially follow a simple decision tree
structure and take thresholds into account.
Subsequently, approaches have been introduced
which are based on time series analysis (Ahmed
and Cook, 1980), identification of low-volume
conditions (Dudek et al., 1975), filtering and
smoothing-based algorithms (Stephanedes and Chas-
siakos, 1993), a dynamic-systems-model-based al-
gorithm (Willsky et al., 1980), correlation-analysis-
based approaches (Takaba and Matsuno, 1985), the
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
16
McMaster catastrophe theory-based algorithm (Gall
and Hall, 1989), and a mathematical traffic-flow-
model-based algorithm (Lin and Daganzo, 1997).
More recently, video-based approaches have been
outlined (Shehata et al., 2008) and combined with
semantic annotations (Kamijo et al., 2004). In ad-
dition to these infrastructure-based approaches for
estimating flows, probe vehicles have been consid-
ered (Jenelius and Koutsopoulos, 2013). Some work
is especially dedicated to urban environments (Feng
et al., 2014) which may serve the incident detection.
However, these approaches all come with some
limitations: Either they are designed for highways
only or they are based on experienced travel times
through the underlying road network, and/or they do
not distinguish between different incident types (and
the corresponding reaction). Most importantly, there
is no integrated traffic management solution that con-
siders detected incidents, an estimation of their sever-
ity and impact, or takes this information pro-actively
into account when, for instance, deciding about traffic
control or progressive signal systems.
In response to these observations, we presented
a novel clustering-based approach for AID in urban
road networks that is based on standard loop detec-
tor technology again (Thomsen et al., 2021). Based
on the ICs’ responsibility zones (i.e. intersection area
and incoming sections equipped with induction loop
sensors), the controllers consider the time series of the
detector loop data. They then apply techniques such
as DBSCAN (Ester et al., 1996) to detect incidents
online within a certain time window. We showed that
appropriate detection accuracy is achieved for condi-
tions with high traffic loads, while the approach still
suffers in weak load conditions.
2.4 Organic Traffic Control
The Organic Traffic Control (OTC) system (Proth-
mann et al., 2009) and its extensions serve as a ba-
sis for this work. The OTC system is a self-adaptive
and self-organised traffic control system that decides
locally at each intersection about the behaviour of
the underlying traffic light controller (TLC). Here,
“organic” follows the ideas of Organic Comput-
ing (M
¨
uller-Schloer and Tomforde, 2017) and empha-
sises the transfer of principles from nature to technical
systems: The decentralised structure, the cooperation
of smaller, autonomous entities, as well as local adap-
tation and learning capabilities allow for high robust-
ness, scalability, and flexibility.
Based on the Observer/Controller paradigm (Tom-
forde et al., 2011), the OTC system adapts the green
duration of traffic lights using a phase-based ap-
proach and optimises this adaptation strategy at run-
time. This is achieved by means of reinforcement
learning and safety-oriented generation of novel be-
haviour within a simulation environment, see (Pro-
thmann et al., 2009). The adaptation process is per-
formed depending on the currently active cycle time
of the traffic controller, i.e. an adapted control strat-
egy is active for three cycles (typically 60s to 120s)
before it can become subject to adaptations again.
The current traffic flows for all turning movements
passing the intersection (in
vehicles
/hour and estimated
from detector readings) are the basis for any adapta-
tion decision. The estimated waiting times are then
used as feedback to improve the behaviour over time.
OTC is further able to establish PSSs in a fully self-
organised manner (Tomforde et al., 2008) and to pro-
vide route recommendations to drivers which reflect
the current state of the traffic network (Prothmann
et al., 2012).
Based on OTC, further contributions investigated
are robust traffic demand prediction (Sommer et al.,
2013), integration of these predictions in the control
strategies, and infrastructure-based anticipatory route
guidance (Sommer et al., 2016b).
OTC is self-organised in a way that all nodes oper-
ate independently and collaborate to achieve system-
wide goals, such as reducing waiting times, number of
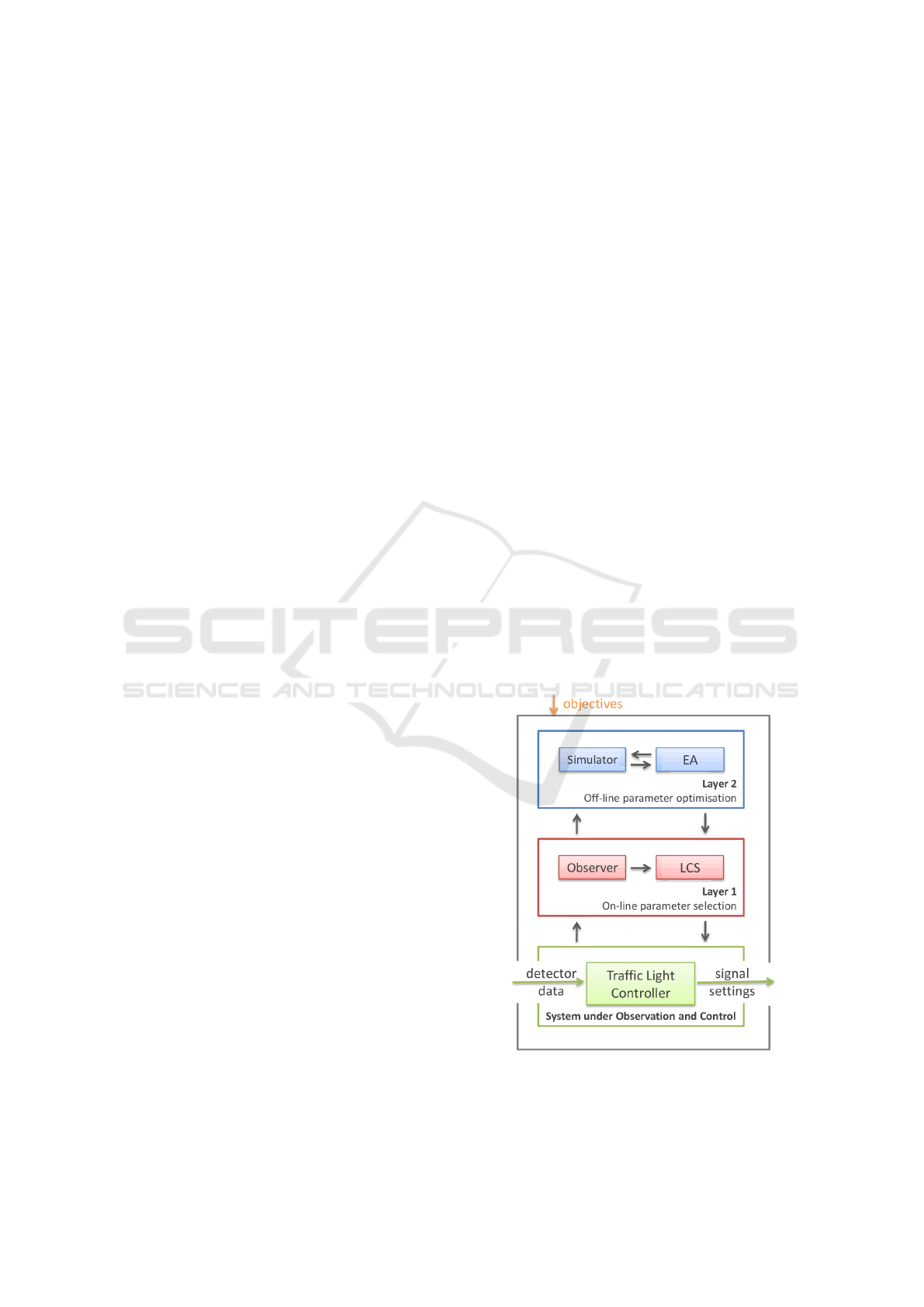
stops, emissions, etc. It is realised as a multi-layered
adaptation and learning system on top of a standard
TLC. Figure 1 illustrates the conceptual design.
Figure 1: Overview of the multi-layered OTC architecture.
Here, Layer 0 represents the System under Obser-
vation and Control (SuOC) which is the actual TLC
Incident-Aware Distributed Signal Systems in Self-Organised Traffic Control Systems
17

and offers interfaces to detectors and neighbouring
nodes. The TLC (i.e. its green durations) is re-
configurable at runtime. This is done by the overly-
ing Layer 1 which assesses the environment (using
the sensors). Based on this observation, the controller
employs a Learning Classifier System (LCS); in this
case a variant of Wilson’s XCS (Wilson, 1995). This
LCS chooses rules from a rule set to modify the traffic
signalisation appropriately at runtime.
Finally, Layer 2 is activated when Layer 1 is con-
fronted with a situation for which no suitable rule or
only insufficient knowledge exists. In this case, traf-
fic simulation software (Aimsun Next, see (Aimsun,
2021)) is used to validate new rules which are gener-
ated by applying an evolutionary algorithm.
3 INCIDENT-AWARE
PROGRESSIVE SIGNAL
SYSTEMS
This section presents our novel incident-aware PSS
algorithm for self-adaptive and self-organised traffic
control systems which is integrated into the OTC sys-
tem. To achieve this, we initially introduce the inci-
dent types under consideration, summarise the exist-
ing decentralised progressive signal system (DPSS)
algorithm that serves as a basis for this work, and de-
fine the extension of this algorithm.
3.1 System Model and Incident Types
We assume regular urban road networks of varying
topology and decentralised nodes with intersection
controllers (ICs) that are responsible for controlling
the TLCs. Each node covers the area of the intersec-
tion as well as the incoming and outgoing sections
which are assumed to be equipped with detectors (e.g.
induction loops). Furthermore, each node has the ca-
pability to (a) communicate with the neighbours that
share its road segment as well as to (b) detect traf-
fic incidents within the intersection, the incoming and
the outgoing sections. Here, we consider three groups
of possible static incidents as established in (Thomsen
and Tomforde, 2022):
• Section closure: Complete closing of the section
between two intersections in one direction
• Lane closure: Closing of one (or possibly more)
lanes of a multi-lane section
• Partial lane closure: Similar to a lane closure, but
limited to a segment of the section straight on)
Other types of incidents, e.g. both-way closures
of sections, a partial or a full blockage of an intersec-
tion or a technical defect (“loss of function”), will be
addressed in future work.
The incident detection mechanism employed by
the node is not further specified. It can be based on
machine learning technology as mentioned in Sec-
tion 2.3 or the approach from (Thomsen and Tom-
forde, 2022) with a possible extension for validation.
The only requirement is the ability to provide infor-
mation according to these knowledge levels (KL):
1. The IC is aware only of whether an incident oc-
curred in its sensor horizon or not.
2. It is additionally aware of the section or turning
where that incident occurred.
3. It further knows the incident type.
Based on these model assumptions, the objec-
tive of this work is to establish a fully decentralised
scheme for PSS that considers the uncertain incident
information available. As a result, we aim to improve
the traffic flow of the underlying road network.
3.2 The Basis: Decentralised
Progressive Signal Systems
The Decentralised Progressive Signal Systems
(DPSS) algorithm is performed by the local intersec-
tion controllers and follows a three-phased approach,
as outlined in (Tomforde et al., 2008):
1. Phase: Each intersection controller informs its
preferred predecessor that it would like to be its
successor in a PSS. Afterwards, each IC checks if
it was selected as a predecessor by its downstream
node. In that case, a partnership is established. Fi-
nally, each node knows it is part of a PSS and what
its predecessor and successor are.
2. Phase: The controllers agree on a common cycle
time. Each IC has a desired cycle time (DCT) and
keeps track of the agreed cycle time (ACT). The
DCT is the one currently active at the intersection
without coordination in a PSS. From the first con-
troller to the last, the ACT is propagated through
the PSS, with each node updating the ACT to its
DCT if the local DCT is higher. After reaching
the last node, the same process is continued back
to the first controller. As a result, all nodes agree
on the ACT – the common cycle time.
3. Phase: The offsets for the synchronised phases of
the traffic controller are determined. These de-
pend on the predecessor’s starting time of the syn-
chronised phase, the travel time between sections,
the vehicle serving time and the nodes’ own start
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
18

time of the synchronised phase. For this, each
node propagates its parameters to its successor,
using the same echo algorithm as in phase 2.
3.3 Incident-Aware DPSS
In the following, we present our novel Incident-aware
DPSS (IA-DPSS) algorithm. It consists of four steps
and is performed periodically by each intersection
controller or as a response to incoming messages from
other controllers and local incident alerts. Steps 2, 3
and 4 correspond to the 3 phases of the DPSS already
outlined above.
Step 1: Incident-Aware Conditions
To achieve traffic-flow-based coordination, each con-
troller adapts the currently observed local streams
passing the turning movements. We refer to these ma-
nipulated traffic streams as “synthetic streams”. The
measured traffic flow is artificially increased or de-
creased by a certain degree on the sections towards
the remaining possible neighbours (and possibly set
to zero in case a path to a successor is blocked by
an incident). The remaining neighbours are intersec-
tions reachable via an incident-free section. As an
alternative, we re-distribute the traffic flow based on
weights. This will be referred to as “weighted dis-
tribution” which are calculated by first adding up the
total traffic flow f
τ
between the remaining neighbours
and then dividing the section’s traffic flow f
i
by the
total flow:
w
i
=
f
i
f
τ
Another alternative is re-distributing the traffic
flow equally between all remaining neighbours. This
will be referred to as “equal distribution”. When no
re-distribution takes place, this is referred to as in-
cident flow reduction. How these synthetic streams
are used depends on the knowledge levels (KL) intro-
duced in Section 3.1:
1. KL: The controller does not know the location.
Since waiting for sensor information to show an
abnormal trend would exhibit similar behaviour as
without incident awareness due to delayed statis-
tics, the node is excluded from DPSS calculation:
All synthetic streams at that node are set to zero.
2. KL: As no information regarding the incident type
and impact are available, a default is used. For
example, we estimate the averaged reduction of
capacity by 50% and therefore determine the syn-
thetic stream accordingly. Note that this is just a
default value. It could be learned through experi-
ence over time and therefore would be subject to
customisation by the local nodes.
3. KL: For section closures, the synthetic traffic
streams over this section are set to zero. Option-
ally, the original flows are distributed to the re-
maining open streams.
For lane closures, the reduction depends on the
number of lanes: r =
BlockedLanes
/TotalLanes. The
synthetic flow is then f
s
= f × (1 − r). Again,
we optionally distribute uniformly the decreased
flows to all remaining streams.
For partial lane closures, we decrease r by a
weight that is determined by the impact of the in-
cident (i.e. estimated length divided by the sec-
tion’s capacity).
Finally, for turning closures, we use the same for-
mula and calculate r for each outgoing section by
considering the turnings with incidents. In par-
ticular, we calculate r as the count of disturbed
turnings divided by the count of all turnings lead-
ing to this outgoing section. Again, a possible re-
distribution of reduced flow values is considered.
Step 2: Partnerships
Each node determines the currently strongest traffic
flow running over its training movements. Let us
assume that node j determines the turning from up-
stream node i to downstream node k as its strongest
turning movement. For node j, the expected highest
benefit lies in the coordination of the (longest) sig-
nal phase serving the selected turning from i to k with
the respective upstream intersection i. We call this
a “synchronised phase”. Consequently, node j sends
its desired predecessor i a message, asking it to be its
successor in a PSS. This is performed in parallel by
all nodes. As soon as all nodes have informed their
desired predecessor, they perform a local matching.
The local matching verifies that the downstream
node k selected the node as the desired predecessor.
Then the partnership is confirmed and other possible
registered nodes are rejected. For those nodes where
this rejection prohibits the first choice, the process
checks for the second-best solution and performs the
same acknowledge/reject mechanism. As a result, all
nodes know if they are part of a PSS and who their
predecessor and successor are. Furthermore, the first
and last nodes of the PSS know about their special
position as they have no predecessor or successor.
Incident-Aware Distributed Signal Systems in Self-Organised Traffic Control Systems
19
Step 3: Common Cycle Time
Based on a short safety interval (usually 3s), the first
node starts building the PSS which requires a com-
mon cycle time. Since this controls the capacity of the
node (i.e. longer cycle times correspond to higher ag-
gregated traffic volumes passing the intersection), the
common cycle time follows the principle of the weak-
est link: Nodes have to identify the smallest possible
cycle time for all participants of the PSS. Each node
i keeps tracks of its own “desired cycle time” (DCT
i
)
and an “agreed cycle time” (ACT ). The desired cycle
time DCT
i
is the cycle time node i would prefer for
the current traffic situation if it was not part of a PSS.
This can be retrieved from the learning component in
OTC or, if this is not active, the current cycle time.
The participating nodes determine an agreed cy-
cle time ACT . Since the DCT
i
is as short as possible,
due to the underlying objective to decrease averaged
waiting times at the nodes, the ACT is selected as the
maximum of all DCTs of the nodes i. A shorter ACT
might reduce the capacity of the most heavily used
node more than is acceptable, leading to rising queues
in its approaches.
A fully distributed echo algorithm determines
ACT : Initially, each node i stores its knowledge on
the agreed time locally as ACT
i
. The first node in the
PSS updates its desired cycle time DCT
1
(by setting
ACT
1
:= DCT
1
) and sends ACT
1
to its successor in
the PSS. The succeeding nodes i, i = 2, ... ,n forward
their ACT
i
after updating it:
ACT
i
:= max{DCT
i
,ACT
i−1
}
= max{DCT
i
, max
j∈{1,...,i−1}
{DCT
j
}}
= max
j∈{1,...,i}
{DCT
j
},
The last node propagates the ACT
i
back to the first
node, while each participant repeats the above pro-
cess. As a result, all nodes are aware of the most suit-
able ACT for the PSS.
Step 4: Offsets and Synchronisation
Finally, for the nodes respecting the ACT the offsets
as well as an appropriate signalisation can be deter-
mined. All nodes proportionally increase the green
durations of their signal phases until the sum of all
phase durations, including interphases which are kept
constant, corresponds to the ACT .
Naturally, the first node has no offset restrictions.
For each successor node i, i = 2,.. .,n, the offset o
i
depends on:
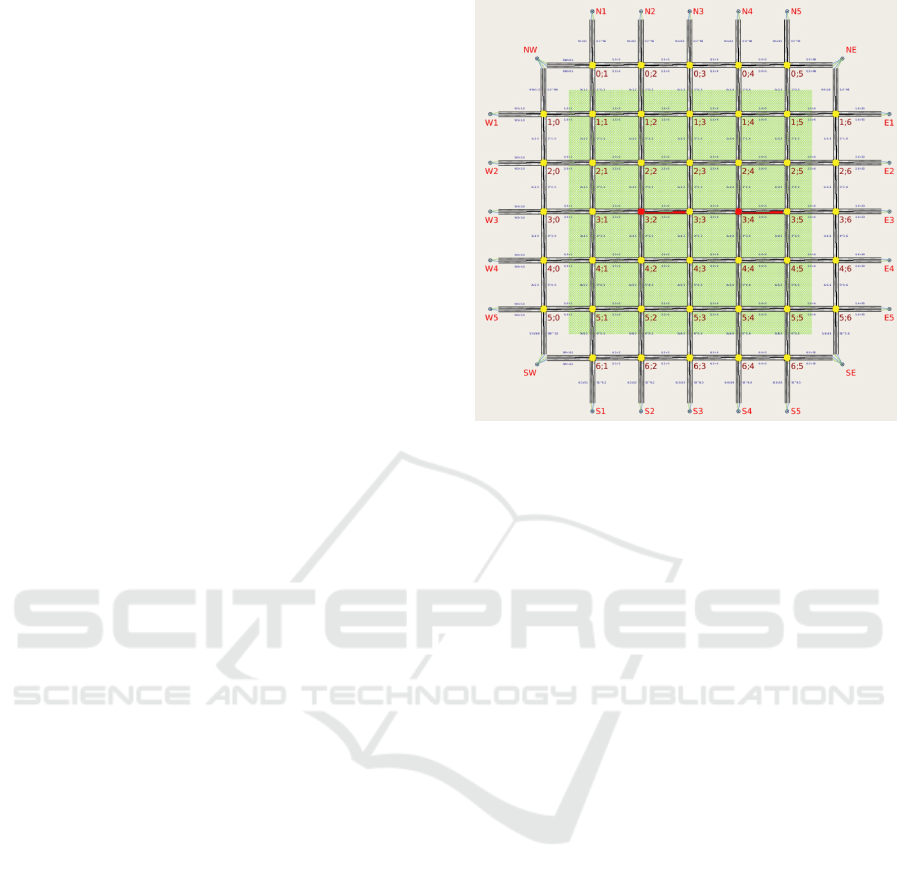
Figure 2: Test environment: A 7-by-7 Manhattan-style net-
work. The green area marks the analysed junctions; those
outside are simulated but not analysed, to avoid simulation
artefacts. The sections marked red feature the incidents sim-
ulated in Section 4: The single incidents of the first 3 exper-
iments are located in the left section. The additional one of
the combined experiment is placed in the right section.
• predecessor’s offset o
i−1
,
• start p
i−1
of the synchronised phase within the
predecessor’s TLC,
• time d
i−1,i
cars need to arrive from a predecessor,
• start p
i
of the synchronised phase within the
node’s own TLC, and finally,
• time q
i
needed to serve queued vehicles for the
synchronised phase.
All successors must know the absolute time s
when the first node activates its TLC: the start time
for the PSS. Again, an echo algorithm is used by the
first node. It informs its successor about the start
time s, its offset (without loss of generality o
1
= 0, the
first nodes starts the PSS at time s) and the start p
1
of the synchronised phase in its TLC. The nodes i,
i = 2, ...,n, shift their signal plan by calculating their
own offset, relative to the first PSS node:
o
i
= (o
i−1
+ p
i−1
+ d
i−1,i
− p
i
− q
i
) mod ACT.
Here, the time d
i−1,i
is assumed to be available
locally at each node for all its neighbours j (one of
which is node i − 1). This assumption is reasonable
since d
i−1,i
depends on the fixed distance and usually
constant speed limits between nodes.
Furthermore, the current value of q
i
is a small con-
stant that will in the future be estimated based on local
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
20

Figure 3: Simulated traffic demands. The left graph visualises the demand during the 90 min of the first half which has an
emphasis on a west-east direction. The right graph depicts the pronounced north-south demands during the second half.
traffic. Once the offset calculation is finished, the val-
ues for s, o
i
and p
i
are forwarded to the successor in
the PSS until the last node is reached and the offset
calculation is completed. To avoid any violation of
legal requirements, the change not done immediately
but by using a statical handover signal plan, where
the phase order is kept and the durations are adapted
proportionally to fill in the required offset.
Further Features
The changing traffic conditions require a constant re-
assessment of the most promising PSS constellations.
To this end, the update mechanism from (Tomforde
et al., 2008) is reused. A global perspective on the
status of the traffic conditions would allow for opti-
mal constellations, while our IA-DPSS is a heuris-
tic with local viewpoint (therefore, faster, more ro-
bust and scalable). Optimal constellations could be
achieved by taking a global perspective on the traf-
fic, such as the hierarchical extension introduced in
(Tomforde et al., 2010) provides .
4 EVALUATION
4.1 Experimental Setup
To evaluate the IA-DPSS algorithm, we used the 7-
by-7 Manhattan-style network in Fig. 2 which was
simulated using Aimsun Next. This professional sim-
ulator was chosen since it provides close-to-reality
simulations with realistic results. Traffic demands
have been defined as shown in Fig. 3.
The experiments followed the same methodology
as in (Tomforde et al., 2008) and have a duration of
three hours, with an additional warm-up period of 15
min. All incidents occur 45 min after warm-up. OTC
serves as a basis for the implementation and analy-
sis of the behaviour. We compare the impact of the
different knowledge levels and investigate the benefit
over a standard DPSS approach. All results are av-
eraged values over five runs of Aimsun experiments
with different random seeds.
4.2 Experimental Results
Experiment 1: Section Closure
First, we analyse the effect of one central section be-
ing closed by an incident. Figure 4 shows the increas-
ing number of stops during a 45 min closure: Com-
pared to the standard DPSS, all three IA-DPSS vari-
ants lead to more stops at the beginning of closure
as they react more efficiently to reroute the held back
traffic. But after the new situation is established and
towards the end of the incident, the standard DPSS ex-
hibits the most stops per km and vehicle. Especially
after the incident, the update is less successful, result-
ing in a benefit of about 5% for the IA-DSS variants.
When looking at the travel times, Fig. 4 illus-
trates how much the average travel time per car and
km increased: While the standard DPSS performs the
worst, KL 3 provides the highest benefit, compared
to the other two levels and the reference. This is ex-
pected due to the more precise response. However,
the equal distribution strategy for KL 3 seems to be
less successful and should therefore not be used.
Incident-Aware Distributed Signal Systems in Self-Organised Traffic Control Systems
21

Figure 4: Average number of stops per car and kilometre with a section closure lasting from 0:45 to 1:50.
Figure 5: A comparison of the DPSS (with “no incident awareness”) and the different IA-DPSS variants regarding the average
time a vehicle takes longer per kilometre while the section closure in Fig. 4 is active.
Experiment 2: Lane Closure
Here, only one lane of the double-lane road is closed.
Generally, the number of stops for an 15 min clo-
sure is lower than the in case of the section closures
(Fig. 4), and all algorithms behave similarly at that
level. One exception is the IA-DPSS with weighted
distribution which reacts slightly faster but also with
stronger fluctuations than the others.
While the number of stops does not give a clear
indication, Fig. 6 illustrates the roughly 1 to 2 sec-
onds of added average travel time in. Here, the IA-
DPSS algorithm exhibits an apparent benefit when
compared to the standard DPSS.
Experiment 3: Partial Lane Closure
Similar to the lane closures, the general number of
stops is lower when compared to the section closures,
and none of the algorithms deviates significantly dur-
ing the 15 min partial lane closures. But Fig. 7 in-
dicates that again one variant – IA-DPSS at KL 2 –
performs better the others and the standard DPSS.
Experiment 4: Multiple Incidents
Here, we simulate two simultaneous incidents which
are located at two different sections (see Fig. 2). The
best-performing IA-DPSS uses a combination of re-
duction factor for (partial) lane closures and weighted
distribution for section closures at KL 3. The com-
parison between the DPSS and the IA-DPSS in Fig. 8
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
22

Figure 6: Average added travel time per kilometre and cars for the DPSS and the IA-DPSS variants in case of simulated 15
min lane closure.
Figure 7: Average added travel time per km and car for the DPSS and the different IA-DPSS variants in case of a 15 min
partial lane closure.
shows that the averaged travel time after the incidents
have been removed increases for IA-DPSS, while it
is slightly lower beforehand. This is because waiting
times are only analysed as soon as the cars leave the
network – and the result of the IA-DPSS is a slightly
longer route due to avoidance of incident-regions. In
other words: Although the key metric is not reduced,
the desired effect has been achieved – longer incident
times would lead to higher benefits. Figure 9 details
the results for the different incident types. Here, ho-
mogeneous incidents have a benefit of 10% compared
to DPSS. On the other hand, heterogeneous incident
types still require more customisation.
5 CONCLUSIONS
In this work, we presented a fully distributed algo-
rithm for establishing progressive signal systems in
self-adaptive and self-organised traffic control sys-
tems. The IA-DPSS is a four-phased algorithm that
adapts the local traffic demand representation at each
intersection. It negotiates partnerships in a PSS,
finds the common cycle time for all nodes of a PSS,
and finally coordinates the signal plans by comput-
ing offsets. We analysed the behaviour in a 7-by-7
Manhattan-style network using close-to-reality simu-
lations in Aimsun Next and using the Organic Traffic
Incident-Aware Distributed Signal Systems in Self-Organised Traffic Control Systems
23

Figure 8: Average number of stops per car and kilometre for of the concurrent section and partial lane closure from 0:45 to
1:50. Here, the “incident aware DPSS” is a combination of algorithms which perform the best for these incident type.
Figure 9: The increase of the added averaged travel time per car per kilometre due to a combination of the two concurrent 45
min incidents in Fig. 8.
Control (OTC) system as a basis. We showed that,
depending on the levels of incident information avail-
able, a reduction of key figures such as the number of
stops of vehicles and added average travel times can
be achieved.
In future work, we will first apply this approach
to less regular topology modelling in real city envi-
ronments, as done in previous work. We will also in-
vestigate the impact of more complex incident condi-
tions (i.e. interweaving and more heterogeneous) and
the mutual influences on the self-learning behaviour
of the underlying OTC system. From a machine learn-
ing perspective, we will also look into tuning the al-
gorithms. Thresholds and adapting weighting factors
of the IA-DPSS will be learned locally.
ACKNOWLEDGEMENTS
This research was supported by the Deutsche
Forschungsgemeinschaft, DFG, in the context of the
project “Zwischenfall-bewusstes resilientes Verkehrs-
management f
¨
ur urbane Straßennetze (InTURN)” un-
der grant TO 843/5-1. We acknowledge this support.
REFERENCES
Ahmed, S. and Cook, A. (1980). Time series models for
freeway incident detection. Transp. Eng. J of the Am.
Soc. of Civ. Eng., 106(6):731–745.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
24

Aimsun (2021). Aimsun Next 20 User’s Manual, Aimsun
Next 20.0.3 edition.
Bazzan, A. L. (2005). A distributed approach for coordina-
tion of traffic signal agents. Autonomous Agents and
Multi-Agent Systems, 10(2):131–164.
Dudek, C., Messer, C., and Nuckles, N. (1974). Incident
detection on urban freeways. Transp. Res. Rec., 495.
Dudek, C., Weaver, G., Ritch, G., and Messer, C. (1975).
Detecting freeway incidents under low-volume condi-
tions. Transp. Res. Rec., 533:34–47.
Dusparic, I. and Cahill, V. (2009). Using distributed w-
learning for multi-policy optimization in decentralized
autonomic systems. In Proc. of 6th Int. Conf. on Au-
tonomic Computing, pages 63–64. ACM.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In kdd, pages 226–
231. AAAI Press.
Feng, Y., Hourdos, J., and Davis, G. (2014). Probe vehicle
based real-time traffic monitoring on urban roadways.
Transp. Res. Part C: Emerging Tech., 40:160–178.
Gall, A. and Hall, F. (1989). Distinguishing between inci-
dent congestion and recurrent congestion: a proposed
logic. Transportation Research Record.
Gershenson, C. (2007). Design and Control of Self-
organizing Systems. PhD thesis, Vrije Universiteit
Brussel.
Gokulan, B. and Srinivasan, D. (2010). Distributed geomet-
ric fuzzy multiagent urban traffic signal control. IEEE
Trans. on Int. Transportation Sys., 11(3):714–727.
Helbing, D., L
¨
ammer, S., and Lebacque, J. (2005). Self-
organized control of irregular or perturbed network
traffic. Optimal control and dynamic games, pages
239–274.
Jenelius, E. and Koutsopoulos, H. (2013). Travel time esti-
mation for urban road networks using low frequency
probe vehicle data. Transp. Res. Part B: Methodolog-
ical, 53:64–81.
Kamijo, S., Harada, M., and Sakauchi, M. (2004). An in-
cident detection system based on semantic hierarchy.
In Proc. of 7th Int. Conf. on Int. Trans. Sys. (ITS’04),
pages 853–858. IEEE.
Lin, W. and Daganzo, C. (1997). A simple detection scheme
for delay-inducing freeway incidents. Transp. Res.
Part A: Policy and Practice, 31(2):141–155.
Mauro, V. and Taranto, C. D. (1990). Utopia. Control,
computers, communications in transportation.
M
¨
uller-Schloer, C. and Tomforde, S. (2017). Organic
Computing-Technical Systems for Survival in the Real
World. Springer.
Oliveira, L. D. and Camponogara, E. (2010). Multi-agent
model predictive control of signaling split in urban
traffic networks. Transp. Res. Part C: Emerging Tech.,
18(1):120–139.
Payne, H. and Tignor, S. (1978). Freeway incident-
detection algorithms based on decision trees with
states. Transportation Research Record.
Payne, H. J. (1975). Freeway incident detection based upon
pattern classification. In Proc. of IEEE Conf. on Deci-
sion and Control, volume 14, pages 688–692. IEEE.
Prothmann, H., Branke, J., Schmeck, H., Tomforde, S.,
Rochner, F., H
¨
ahner, J., and M
¨
uller-Schloer, C.
(2009). Organic traffic light control for urban road
networks. Int. J. Auton. Adapt. Commun. Syst., 2(3).
Prothmann, H., Tomforde, S., Lyda, J., Branke, J., H
¨
ahner,
J., M
¨
uller-Schloer, C., and Schmeck, H. (2012).
Self-organised routing for road networks. In Self-
Organizing Systems - 6th IFIP TC 6 International
Workshop, IWSOS 2012, Delft, The Netherlands,
March 15-16, 2012. Proceedings, pages 48–59.
Robertson, D. and Bretherton, D. (1991). Optimizing net-
works of traffic signals in real time – the SCOOT
method. IEEE Trans. on Veh. Tech., 40(1):11–15.
Shehata, M., Cai, J., Badawy, W., Johannesson, R., and
Radmanesh, A. (2008). Video-based automatic inci-
dent detection for smart roads: The outdoor environ-
mental challenges regarding false alarms. IEEE Trans.
on Int. Transp. Sys., 9(2):349–360.
Sims, A. and Dobinson, K. (1980). The Sydney coordinated
adaptive traffic (SCAT) system – Philosophy and ben-
efits. IEEE Trans. on Veh. Tech., 29(2):130–137.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2013). Using
a neural network for forecasting in an organic traf-
fic control management system. In 2013 Workshop
on Embedded Self-Organizing Systems, ESOS’13, San
Jose, CA, USA, June 25, 2013.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016a). An Or-
ganic Computing Approach to Resilient Traffic Man-
agement. In Autonomic Road Transport Support Sys-
tems, pages 113–130. Birkh
¨
auser.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016b).
Forecast-augmented route guidance in urban traffic
networks based on infrastructure observations. In
Proc. of VEHITS’16, pages 177–186.
Stephanedes, Y. and Chassiakos, A. (1993). Freeway inci-
dent detection through filtering. Transp. Res. Part C:
Emerging Technologies, 1(3):219–233.
Studer, L., Ketabdari, M., and Marchionni, G. (2015). Anal-
ysis of adaptive traffic control systems design of a de-
cision support system for better choices. J Civil Envi-
ron Eng, 5(195):2.
Takaba, S. and Matsuno, H. (1985). Traffic incident detec-
tion using correlation analysis. In SCS 1985 Summer
Comp. Sim. Conf., pages 529–534.
Thomsen, I. and Tomforde, S. (2022). Intersection-centric
urban traffic flow clustering for incident detection in
organic traffic control. In Proc. of VEHITS’22.
Thomsen, I., Zapfe, Y., and Tomforde, S. (2021). Urban
traffic incident detection for organic traffic control: A
density-based clustering approach. In Proceedings of
the 7th International Conference on Vehicle Technol-
ogy and Intelligent Transport Systems, VEHITS 2021,
Online Streaming, April 28-30, 2021, pages 152–160.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and control of organic systems.
In Organic Computing—A Paradigm Shift for Com-
plex Systems, pages 325–338. Springer.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2010). Possi-
Incident-Aware Distributed Signal Systems in Self-Organised Traffic Control Systems
25

bilities and limitations of decentralised traffic control
systems. In Proc. of IJCNN’10, pages 1–9.
Tomforde, S., Prothmann, H., Rochner, F., Branke, J.,
H
¨
ahner, J., M
¨
uller-Schloer, C., and Schmeck, H.
(2008). Decentralised progressive signal systems
for organic traffic control. In 2008 Second IEEE
International Conference on Self-Adaptive and Self-
Organizing Systems, pages 413–422. IEEE.
Vincent, R., Peirce, J., and Webb, P. (1990). Mova traffic
control manual. MOVA reports.
Willsky, A., Chow, E., Gershwin, S., Greene, C., Houpt,
P., and Kurkjian, A. (1980). Dynamic model-based
techniques for the detection of incidents on freeways.
IEEE Transa. on Automatic Control, 25(3):347–360.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
Evolutionary Computation, 3(2):149–175.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
26
