
HMMs Recursive Parameters Estimation for Semi-Bounded Data
Modeling: Application to Occupancy Estimation in Smart Buildings
Fatemeh Rezapoor Nikroo, Manar Amayri and Nizar Bouguila
CIISE, Concordia University, Montreal, Canada
Keywords:
Hidden Markov Models, Recursive Estimation, Semi-Bounded Data, Smart Buildings, Occupancy Estimation.
Abstract:
Optimizing energy consumption is one of the key factors in smart buildings developments. It is crucial to
estimate the number of occupants and detect their presence when it comes to energy saving in smart buildings.
In this paper, we propose a Hidden Markov Models (HMM)-based approach to estimate and detect the occu-
pancy status in smart buildings. In order to dynamically estimate the occupancy level, we develop a recursive
estimation algorithm. The developed models are evaluated using two different real data sets.
1 INTRODUCTION
The daily increase in energy consumption has led to
global warming. Global energy demand has continu-
ously increased while building sector has had a ma-
jor effect in this rapid growth in energy consump-
tion (Kim et al., 2022). In this context, smart build-
ings promise automated systems to control energy
consumption. Environmental control systems have
been proved as a crucial factor in smart buildings.
Another decisive factor in energy consumption con-
cerns the occupants themselves (Gaetani et al., 2016).
Automatic occupancy detection and estimation ap-
proaches allow building energy systems to manage
the energy consumed. While 35% of USA’s en-
ergy consumption is attributed to the heating, cooling
and ventilation (HVAC) systems (Ali and Bouguila,
2022; Erickson et al., 2014), occupants’ behavior has
also a major influence on building energy consump-
tion (Soltanaghaei and Whitehouse, 2016). Studies
have shown that machine learning algorithms are cru-
cial for smart buildings applications (Alawadi et al.,
2020). For instance, machine learning models have
been used to measure HVAC actuation levels (Eba-
dat et al., 2013). Furthermore, a supervised learning
model has been developed in (Amayri et al., 2016) to
estimate the number of occupants based on sensorial
data (e.g. motion detection, power consumption, CO2
concentration sensors, microphone, or door/window
positions).
Machine learning approaches can be grouped into
3 main categories: 1) generative models such as
mixture models and HMMs, 2) Discriminative mod-
els such as support vector machine (SVM) and 3)
Heuristic-based models which combine the 2 previ-
ous families with heuristic information. In this pa-
per we propose HMM-based occupancy models. A
first crucial factor when deploying a HMM model is
the choice of probability density function (Nguyen
et al., 2019). Thus, we investigate 3 distributions
dedicated for semi-bounded data (i.e. positive vec-
tors) which are detailed in section 2. The second
important factor is to estimate the unknown param-
eters which is generally done using maximum likeli-
hood estimation (MLE) within the expectation maxi-
mization (EM) framework. Handling real-time data of
smart buildings requires continuous processing which
is challenging. Therefore, one of the motivations of
this paper is to propose a novel architecture to cope
with real-time data. Online learning techniques pro-
vide solutions addressing real-time occupancy esti-
mation to build models that can be continuously up-
dated (Amayri et al., 2020). We introduce a recursive
algorithm with linear time complexity to detect and/or
estimate the number of occupants.
2 BACKGROUND
2.1 Hidden Markov Models
HMMs are powerful statistical models. The idea of
HMM comes from a limit of Markov model in mod-
eling problems which output is the probabilistic func-
tion of the states (Epaillard and Bouguila, 2016). This
Nikroo, F., Amayri, M. and Bouguila, N.
HMMs Recursive Parameters Estimation for Semi-Bounded Data Modeling: Application to Occupancy Estimation in Smart Buildings.
DOI: 10.5220/0011715200003491
In Proceedings of the 12th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2023), pages 81-88
ISBN: 978-989-758-651-4; ISSN: 2184-4968
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
81

function called emission probability is described in
details in the following sections. Indeed, we assume
more general distributions dedicated to positive vec-
tors to model the output observable data from HMM
to have more flexible models. It is noteworthy to men-
tion the denomination of Hidden in HMM refers to the
states not the parameters of the model. Markov chain
is referred to a time-varying random phenomenon
meeting the Markov property which indicates that the
conditional probability of the forthcoming state is just
based on the current state and not on historical infor-
mation, which can be mathematically formulated as:
p(X
t+1
|X
t
,X
t−1
,...,X
1
) = p(X
t+1
|X
t
) (1)
HMM elements are completely defined as follow,
however, it is mainly represented by three parameters
λ = (π,A, B) (Vai
ˇ
ciulyt
˙
e and Sakalauskas, 2020).
1) The number of states N, each state is defined by S
i
such that S = 1,2,...,N.
2) Vector π = π
1
,π
2
,..., π
N
indicate the probability of
being in each state.
3) The number of possible observations M for each
state as V = V
1
,V
2
,...,V
M
. In case of our work that
observations come from the distributions that we will
define later, they are continuous thus, M is infinite.
4) A is the state transition probability matrix such that
a
i, j
, 1 ≤ i, j ≤ N is the probability of moving to state
j at time t +1 while the model was in state i at time t.
The constraints for transition matrix should be met:
a
i, j
>= 0,
N
∑
j=1
a
i, j
= 1, 1 ≤ i, j ≤ N
5) B is the matrix showing the observation probability
where b
j
(k) is the probability of observing V
k
in state
S
j
.
b
j
(k) = p(V
t
k
|S
t
j
), 1 ≤ i, j ≤ N
The constraints for continuous observations are de-
fined based on the specific probability distribution:
b
j
(k) =
M
∑
m=1
c
jm
p(x|θ)
where θ represents the parameters of the de-
fined distribution, c
jm
is weighting coefficient with
∑
M
m=1
c
jm
= 1.
b
j
(k) >= 0, 1 ≤ j ≤ N, 1 ≤ k ≤ M,
M
∑
j=1
b
j
(k) = 1
2.2 Inverted Dirichlet Distribution
Consider X = (x
1
,x
2
,..., x
K
) as a vector following the
inverted Dirichlet distribution ID(α) with parame-
ter α = (α
1
,α
2
,..., α
K
,α
K+1
), the probability density
function has the following form (Bdiri and Bouguila,
2013):
p(X) =
Γ(α
0
)
∏
K+1
i=1
Γ(α
i
)
K
∏
i=1
x
α
i
−1
i
(1 +
K
∑
i=1
X
i
)
−α
0
where α
0
=
∑
K+1
i=1
α
i
, x
i
> 0, i = 1...K. Many prop-
erties of the inverted Dirichlet distribution are given in
(Tiao and Cuttman, 1965; Bdiri and Bouguila, 2012).
2.3 Generalized Inverted Dirichlet
Distribution
Inverted Dirichlet distribution assumes a positive
correlation, therefore a generalization of it is in-
troduced to cope with this limitation in order to
have the capability of modeling wider range of real-
life data (Bourouis et al., 2014a). Consider X =
(x
1
,x
2
,..., x
K
) as a vector following the Generalized
Inverted Dirichlet distribution GID(α;β) with param-
eter α = (α
1
,α
2
,..., α
K
,α
K
) and β = (β
1
,β
2
,..., β
K
).
The probability density function has the following
form (lingmnwah, 1976; Bourouis et al., 2014b):
p(x
1
,x
2
,..., x
K
) =
K
∏
i=1
Γ(α
i
+ β
i
)
Γ(α
i
)Γ (β
i
)
x
α
i
−1
i
(1 +
∑
i
m=1
x
m
)
η
i
where η
i
= β
i
+ α
i
− β
i+1
i = 1,2, ...,K, β
K+1
=
0, x
i
> 0, i = 1...K. By substituting β
1
= β
2
= ... =
β
K−1
= 0 , inverted Dirichlet distribution with param-
eter α = (α
1
,α
2
,..., α
K
,α
K
,β
K
) is obtained (lingmn-
wah, 1976; Bourouis et al., 2014b).
2.4 Inverted Beta-Liouville Distribution
Inverted Beta-Liouville distribution (IBL) has been
proved as an efficient way of modeling positive vec-
tors (Bouguila et al., 2022; Bourouis et al., 2021). It
overcomes the limit of the Inverted Dirichlet in the as-
pect of positive covariance and presents less parame-
ters as compared with generalized Inverted Dirichlet
(Bouguila et al., 2022; Bourouis et al., 2021). IBL is
in the family of the Beta-Liouville distribution which
is a natural model for analyzing compositional data
(Fang et al., 2018). Consider r = λw/(1 − w) which
w is a Beta distribution with parameters α and β as
the generating variate, thus r follows an inverted Beta
distribution with parameters β and λ. The generating
density function is (Fang et al., 2018):
f (u|θ) =
1
B(α,β)
λ
β
u
α−1
(λ + u)
α+β
(2)
where u > 0 and θ = (α, β,λ). The Liouville distri-
bution with positive parameters (α
1
,α
2
,..., α
K
) and
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
82

generating density of f (.) with parameter δ is defined
as below (Bouguila, 2012; Fang et al., 2018):
p(
~
X|α
1
,..., α
K
,δ) = f (u|δ)
Γ(
∑
K
i=1
α
i
)
u
∑
K
i=1
α
i
− 1
K
∏
i=1
x
α
i
−1
i
Γ(α
i
)
We have the probability density function for
~
X as fol-
lows:
p(x
1
,x
2
,..., x
K
) =
Γ(α
0
)Γ(α + β)
Γ(α)Γ(β)
λ
β
(
∑
K
i=1
x
i
)
α−α
0
(λ +
∑
K
i=1
x
i
)
α+β
K
∏
i=1
x
α
i
−1
i
Γ(α
i
)
where θ = (α
1
,α
2
,..., α
K
,α, β,λ), α
0
=
∑
K
i=1
α
i
, x
i
> 0, i = 1...K. This distribution
can be converted to inverted Dirichlet distribution
by equalizing α = α
0
(Fang et al., 2018). Many
properties of the distribution are given in (Hu et al.,
2019; Koochemeshkian et al., 2020).
3 RECURSIVE MODEL
To learn the HMM parameters, we need to estimate
the distribution parameters of the HMM (Vai
ˇ
ciulyt
˙
e
and Sakalauskas, 2020). To achieve this goal we cal-
culate the log likelihood of each probability density
function then maximize it. Each probability density
function is explained in a different sub-section. How-
ever, the whole process is the same. It is noteworthy
that ψ used in equations below is the Digamma func-
tion which is the logarithmic derivative of the Gamma
function. The probability that sequence x is observed
while the system is at specific time t considering state
q, which can be any in range of q = 1, ,2, ...,N, is:
π
<q>
t
logdistribution(x
t
|α< q >)
∑
N
j=1
π
< j>
t
logdistribution(x
t
|α< j >)
(3)
Now the summation over t indicates the probability of
the model being in specific state considering specific
output sequence x is observed:
T
∑
t=1
π
<q>
t
logdistribution(x
t
|α< q >)
∑
N
j=1
π
< j>
t
logdistribution(x
t
|α< j >)
(4)
where “distribution” refers to each distribution we
have used in this paper. Here, we define some same
variables which are used in the rest of the paper for all
the 3 distributions.
θ
q
t
= π
q
t
logdistribution(x
t
|
~
θ
<q>
) (5)
ω
<q,s>
t
= ω
<q,s>
t−1
+
1
t
(
log(x
s
t
)θ
q
t
∑
N
j=1
θ
j
t
− ω
<q,s>
t−1
)
(6)
γ
q
t
= γ
q
t−1
+
1
t
(
θ
q
t
∑
N
j=1
θ
j
t
− γ
q
t−1
) (7)
where 1 ≤ q ≤ N , 1 ≤ s, i ≤ K.
3.1 Inverted Dirichlet Distribution
The log likelihood function of inverted Dirichlet (ID)
distribution is as follows:
logID(
~
X|
~
θ) = log Γ(
K+1
∑
i=1
α
i
) +
K
∑
i=1
(α
i
− 1)logx
i
−
(
K+1
∑
i=1
α
i
)log(1 +
K
∑
i=1
x
i
) −
K+1
∑
i=1
logΓ(α
i
)
To maximize the above equation, derivative of it with
respect to each parameter is shown below:
∂log ID(
~
X|
~
θ)
∂α
j
=
ψ(
∑
K+1
i=1
α
i
) + logx
j
− log(1 +
∑
K
i=1
x
j
)
−ψ(α
j
) if j = 1,2,..., K
ψ(
∑
K+1
i=1
α
i
) − log(1 +
∑
K
i=1
x
j
) − ψ(α
j
)
if j = K + 1
Now the batch formula to derive α
i
is as below:
α
i
= ψ
−1
[ψ(
K+1
∑
i=1
(α
q
i
))
+
1
T
∑
T
t=1
log(x
s
t
)
π
<q>
t
logID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logID(x
t
|
~
θ
< j>
)
1
T
∑
T
t=1
π
<q>
t
logID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logID(x
t
|
~
θ
< j>
)
−
1
T
T
∑
t=1
π
<q>
t
logID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logID(x
t
|
~
θ
< j>
)
] i = 1, 2,...K
α
K+1
= ψ
−1
[ψ(
K+1
∑
i=1
(α
q
i
))
−
1
T
T
∑
t=1
π
<q>
t
logID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logID(x
t
|
~
θ
< j>
)
] (8)
where 1 ≤ q ≤ N , 1 ≤ s ≤ K. We assume each ob-
servation occurs in specific time step t. Hence, in our
recursive model, the parameters are updated as time
goes until they meet the condition of |θ
new
−θ
old
| <=
ε. The middle variables and the main parameters are:
α
<q,s>
t
= ψ
−1
[ψ(
K+1
∑
i=1
(α
q
i
)) +
ω
<q>
t
γ
q
t
− γ
q
t
]
(9)
α
<q,K+1>
t
= ψ
−1
[ψ(
K+1
∑
i=1
(α
q
i
)) +
ω
<q>
t
γ
q
t
− γ
q
t
] (10)
where 1 ≤ q ≤ N , 1 ≤ s, i ≤ K.
HMMs Recursive Parameters Estimation for Semi-Bounded Data Modeling: Application to Occupancy Estimation in Smart Buildings
83

3.2 GID Distribution
The log likelihood function GID distribution is:
logGID(
~
X|
~
θ) =
K
∑
i=1
log(α
i
+ β
i
) + (α
i
− 1)logx
i
−log Γ(α
i
) − log Γ(β
i
) − η log(1 +
i
∑
m=1
x
m
)
To maximize the above equation, derivative of it with
respect to each parameter is shown below:
∂log GID(
~
X|
~
θ)
∂α
j
= ψ(α
j
+ β
j
) + log(x
j
) − ψ(α
j
)
−log(1 +
j
∑
m=1
x
m
)
∂log GID(
~
X|
~
θ)
∂β
j
= ψ(α
j
+ β
j
) − ψ(β
j
)
−log(1 +
j
∑
m=1
x
m
)
(11)
Now the batch formula to derive α
i
and β
i
are:
α
i
= ψ
−1
[ψ(α
i
+ β
i
)
+
1
T
∑
T
t=1
log(x
s
t
)
π
<q>
t
logGID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logGID(x
t
|
~
θ
< j>
)
1
T
∑
T
t=1
π
<q>
t
logGID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logGID(x
t
|
~
θ
< j>
)
−
1
T
T
∑
t=1
π
<q>
t
logGID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logGID(x
t
|
~
θ
< j>
)
] (12)
β
i
= ψ
−1
[ψ(α
i
+ β
i
)
−
1
T
T
∑
t=1
π
<q>
t
logGID(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logGID(x
t
|
~
θ
< j>
)
] (13)
α
<q,s>
t
= ψ
−1
[ψ(α + β) +
ω
<q>
t
γ
q
t
− γ
q
t
] (14)
β
<q,s>
t
= ψ
−1
[ψ(α + β) − γ
q
t
] , 1 ≤ q ≤ N (15)
3.3 IBL Distribution
The log likelihood function IBL is as follows:
logIBL(
~
X|
~
θ) = log Γ(
K
∑
i=1
α
i
) + logΓ(α + β) − log Γ(α)−
logΓ(β) + βlog λ + (α −
K
∑
i=1
α
i
)log(
K
∑
i=1
x
i
)−
(α + β)log(λ +
K
∑
i=1
x
i
) +
K
∑
i=1
(α
i
− 1)log x
i
−
K
∑
i=1
logΓ(α
i
)
To maximize the above equation:
∂log IBL(
~
X|
~
θ)
∂α
j
= ψ(
K
∑
i=1
α
i
) + logx
j
− ψ(α
j
) − log(
K
∑
i=1
x
i
)
∂log IBL(
~
X|
~
θ)
∂α
= ψ(α + β) − ψ(α) + log(
K
∑
i=1
x
i
)−
log(λ +
K
∑
i=1
x
i
)
∂log IBL(
~
X|
~
θ)
∂β
= ψ(α + β) − ψ(β) + logλ−
log(λ +
K
∑
i=1
x
i
)
(16)
∂log IBL(
~
X|
~
θ)
∂λ
=
β
λ
−
α + β
λ +
∑
K
i=1
x
i
(17)
The batch formula to derive α
i
, α, β, λ are as below:
α
i
= ψ
−1
[ψ(
K
∑
i=1
(α
q
i
))
+
1
T
∑
T
t=1
log(x
s
t
)
π
<q>
t
logIBL(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logIBL(x
t
|
~
θ
< j>
)
1
T
∑
T
t=1
π
<q>
t
logIBL(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logIBL(x
t
|
~
θ
< j>
)
−
1
T
T
∑
t=1
π
<q>
t
logIBL(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logIBL(x
t
|
~
θ
< j>
)
] (18)
α = ψ
−1
[ψ(α + β)
+
1
T
T
∑
t=1
π
<q>
t
logIBL(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logIBL(x
t
|
~
θ
< j>
)
]
β = ψ
−1
[ψ(α + β) + log λ−
1
T
T
∑
t=1
π
<q>
t
logIBL(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logIBL(x
t
|
~
θ
< j>
)
] (19)
λ =
β
α
1
T
T
∑
t=1
π
<q>
t
logIBL(x
t
|
~
θ
<q>
)
∑
N
j=1
π
< j>
t
logIBL(x
t
|
~
θ
< j>
)
(20)
where 1 ≤ q ≤ N , 1 ≤ s,i ≤ K. Based on the mid-
dle variables defined earlier, above explanation of re-
cursive logic and the batch formula of IBL, the main
parameters are described as below:
α
<q,s>
t
= ψ
−1
[ψ(
K+1
∑
i=1
(α
q
i
)) +
ω
<q>
t
γ
q
t
− γ
q
t
]
(21)
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
84

α
<q,s>
t
= ψ
−1
[ψ(α + β) + γ
q
t
] (22)
β
<q,s>
t
= ψ
−1
[ψ(α + β) + log γ − γ
q
t
]
(23)
λ
<q,s>
t
=
β
α
γ (24)
where 1 ≤ q ≤ N , 1 ≤ s ≤ K. We present the recur-
sive proof of the model equations:
ω
<q,s>
t
= ω
<q,s>
t−1
+
1
t
(
log(x
s
t
)θ
q
t
∑
N
j=1
θ
j
i
− ω
<q,s>
t−1
)
=
1
t − 1
t−1
∑
i=1
log(x
s
t
)θ
q
i
∑
N
j=1
θ
j
i
+
1
t
(
log(x
s
t
)θ
q
t
∑
N
j=1
θ
j
t
−
1
t − 1
t−1
∑
i=1
log(x
s
t
)θ
q
i
∑
N
j=1
θ
j
i
) =
1
t
t
∑
i=1
log(x
s
i
)θ
q
i
∑
N
j=1
θ
j
i
γ
q
t
= γ
q
t−1
+
1
t
(
θ
q
t
∑
N
j=1
(θ
j
t
)
− γ
q
t−1
)
=
1
t − 1
t−1
∑
i=1
θ
q
i
∑
N
j=1
θ
j
i
+
1
t
(
θ
q
t
∑
N
j=1
θ
j
t
−
1
t − 1
t−1
∑
i=1
θ
q
i
∑
N
j=1
θ
j
i
)
=
1
t
t
∑
i=1
θ
q
i
∑
N
j=1
θ
j
i
We present the algorithm for all of the models
in Algorithm 1 which is based on the EM frame-
work. The variables ~µ
1
=(α
1
,α
2
,..., α
K
,α
K+1
),
~µ
2
=(α
1
,α
2
,..., α
K
,α
K
,β
1
,β
2
,..., β
K
),
~µ
3
=(α
1
,α
2
,..., α
K
,α, β,λ) are representative of
ID-HMM, GID-HMM and IBL-HMM parameters,
respectively.
Algorithm 1: Recursive expectation maximization algo-
rithm for ID-HMM, GID-HMM and IBL-HMM parameter
estimation.
Output: ~µ
1
, ~µ
2
and ~µ
3
with respect to conditions,
1 ≤ t ≤ T,1 ≤ s ≤ K, 1 ≤ q ≤ N
Initialization: ~µ
1
,~µ
2
,~µ
3
, initial-probability of each
state and transition-probability between states
Input: each row of dataset; x
t
, 1 ≤ t ≤ T
While |~µ
1
t
−~µ
1
t−1
| < ε, |~µ
2
t
−~µ
2
t−1
| < ε, |~µ
3
t
−
~µ
3
t−1
| < ε
E-step
Calculate values of θ
q
t
,ω
<q,s>
t
,γ
q
t
;
M-step:
Update values of~µ
1
,~µ
2
,~µ
3
The algorithm starts with random initialization of
the parameters of both HMM and distributions we
consider for data. Then, the algorithm goes through
the loop for E-step and M-step until the termination
criterion is met which is based on monitoring the dif-
ference between the previous value and update one of
each parameter after each loop. This difference value
is shown as ε and set to 0.6. As we have mentioned
before, in each loop the values are updated based on
the new rows of data feed to the model. We assume
that each row of dataset occurs in a specific time, so
that each time the new data is obtained, parameters
are updated.
4 EXPERIMENTAL RESULTS
Figure 1: Visualization of occupancy detection data accord-
ing to different features.
In this section we present the validation of our pro-
posed models using 2 different real datasets for both
binary and multiclass classification of occupants in
smart buildings. Data that we have investigated, is
collected during time. Thus, based on the logic of
its application to estimate occupants in a room, each
row of data shows the conditions of the room with
the number of people in specific time, so we were
able to train the model as each row of the data comes,
to update the parameters. In that case we have suc-
cessfully overcame the problem of batch learning for
intensive data. The main motivation to evaluate our
model on occupancy datasets is the fact that in smart
buildings the goal is to automate the systems related
to HVAC which offers less energy wasting along with
better comfort of residents for facilities management
strategic decisions. In smart buildings the sensors col-
lecting environmental factors like the amount of CO
2
HMMs Recursive Parameters Estimation for Semi-Bounded Data Modeling: Application to Occupancy Estimation in Smart Buildings
85

Table 1: Estimated parameters for ID-HMM, GID-HMM and IBL-HMM for occupancy detection dataset.
Model Number of States Parameters
ID-HMM 2 α =
0.2389 0.2414 0.4244 12.47 0.2266 13.03
0.2346 0.2369 1.196 12.42 0.2227 13.34
GID-HMM 2 α =
8.723 8.706 8.708 8.876 8.633
8.786 8.603 8.610 8.778 8.586
β =
8.281 8.149 8.164 9.564 7.607
9.329 9.339 9.329 9.330 9.328
IBL-HMM 2
~
α =
0.9105 0.5656 0.0679 0.0322 0.5916
0.3517 0.3470 0.1467 0.1037 0.3807
α =
0.7223 2.478
β =
0.6733 0.5181
λ =
2.89 2.03
concentration, temperature, relative humidity, etc are
integrated in automation settings. Thus, we have the
collected information of sensors in hand allowing us
to estimate the number of occupants. This is the idea
in HMM, by mapping the collected data as our ob-
servation and the number of occupants as the hidden
states. In all of the experiments, we define the initial
probability of each states (matrix π explained earlier)
as
1
n
assuming n is the total number of states. Transi-
tion matrix along with each distributions’ parameters
are assigned randomly considering their limit accord-
ing to the distribution definition. The termination cri-
terion of the algorithm to avoid endless recursion is
set to ε = 0.6. To analyze our datasets collected over
time, we assume each record occurred in new time
step. Therefore, in our recursive model, the parame-
ters are updated as new record of data feed into the
model.
Binary Classification Dataset (Occupancy Detec-
tion Dataset): The first data used to evaluate our
models is related to occupancy detection. This dataset
is obtained from Machine Learning Repository of
University of California Irvine (UCI). Fig. 1 describes
the distribution of the features. Dataset consists of 5
different features as below which are indicated in a
time series: 1) Temperature, in Celsius, 2) Relative
Humidity, 3) Light, in Lux, 4) CO2, in ppm, 5) Hu-
midity Ratio, Derived quantity from temperature and
relative humidity, in kgwater-vapor/kg-air.
This dataset has two different parts for training
and testing. We have used the training data to train
the model to estimate its parameters, then using the
test data to evaluate the models. Table 1 shows the
number of hidden states for the occupancy detection
dataset along with the values of the model parame-
ters. The values computed through the EM algorithm
Table 2: Accuracy, F-score, precision and recall in percent
for Inverted Dirichlet HMM, Generalized Inverted Dirichlet
HMM and Inverted Beta-Liouville HMM applied for occu-
pancy detection dataset.
Model Accuracy F-score precision recall
ID-HMM 86.81 85.65 82.86 85.65
GID-HMM 86.90 87.55 89.22 86.90
IBL-HMM 84.00 79.85 86.58 84.00
are explained earlier. Model parameters, based on
the distribution considered for emission probability in
HMM, follow different dimensions. Table 2 indicates
the evaluation results of our model based on the 3 dis-
tributions we discussed which are computed on the
testing dataset.
Multiclass Classification Dataset (Occupancy Esti-
mation Dataset): This dataset is used for occupancy
estimation in smart building as the goal was to esti-
mate the number of occupants from 0 to 4. Thus,
the number of hidden states in this sample will be
5. This dataset is obtained from an experiment which
testbed was an office in Grenoble Institute of Technol-
ogy in France (Nasfi et al., 2020). This data was ob-
tained from 30 sensors of motions, power consump-
tion, acoustic pressure, and door position (Amayri
et al., 2020). In order to investigate the model we split
the dataset into training and testing data. We use the
training data to estimate the parameters of our model
then apply the trained model on testing data for clas-
sification to estimate the number of occupants. Table
3 represents the values of parameters for each model
learned with occupancy estimation dataset, while the
evaluation metrics are shown in Table 4. The visuali-
sation of the data is presented in Fig. 2.
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
86
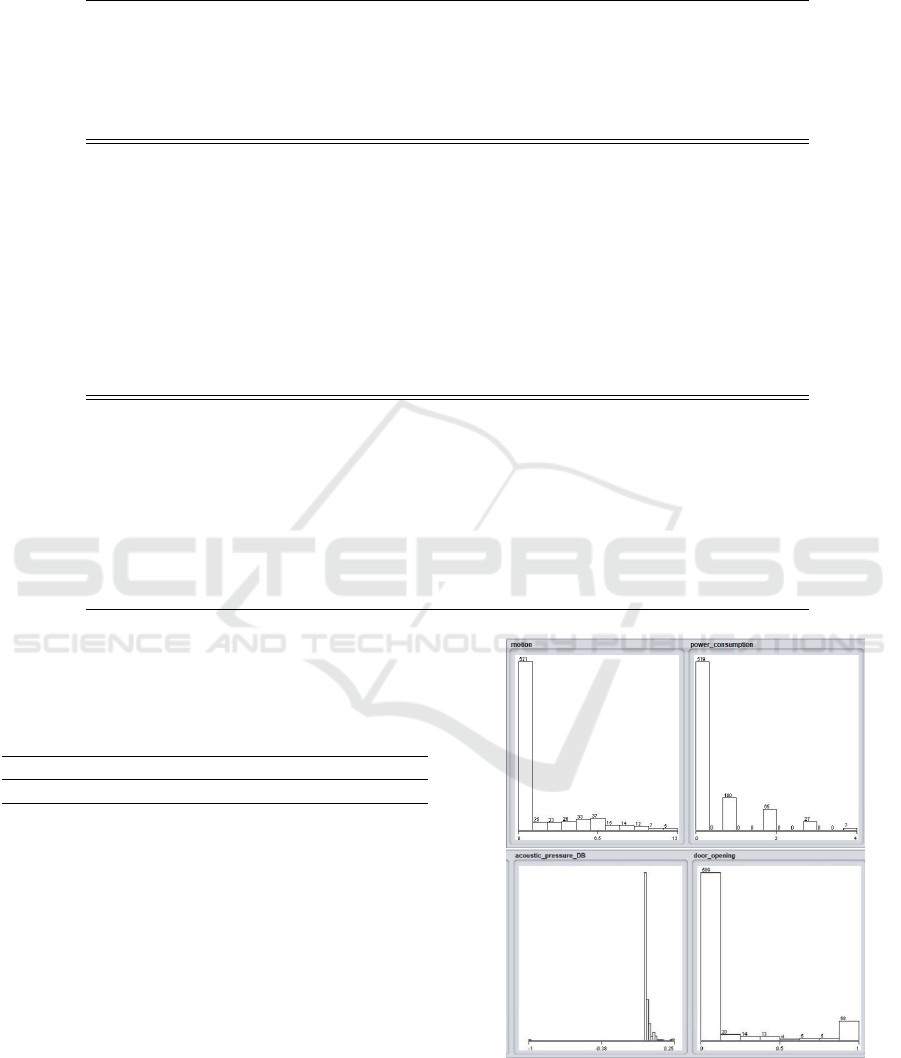
Table 3: Estimated parameters for ID-HMM, GID-HMM and IBL-HMM for occupancy estimation dataset.
Model Number of States Parameters
ID-HMM 5 α =
0.5860 0.0859 0.9971 0.5545 0.2836
0.5054 0.9837 0.2110 0.7645 0.9573
0.3307 0.1928 0.3457 0.2385 0.7199
0.4826 0.3005 0.1633 0.8344 0.9434
0.5469 0.4305 0.3090 0.0707 0.6270
GID-HMM 5 α =
7.361 6.149 4.917 4.447
2.146 2.493 2.591 2.592
4.498 5.912 6.943 6.747
1.057 1.062 1.369 1.134
8.013 6.171 1.003 5.850
β =
5.294 1.663 1.329 1.200
2.720 3.288 3.456 3.457
1.365 1.426 1.543 1.490
2.365 4.393 3.264 2.781
1.211 9.174 4.215 2.368
IBL-HMM 5
~
α =
15.25 40.16 39.95 39.33
0.1666 0.4702 0.7526 0.6555
0.3187 0.4525 0.718 0.6868
0.1185 0.1837 0.3916 0.2882
0.1212 0.1379 0.3014 0.2345
α =
0.6309 15.27 13.84 18.46 8.989
β =
0.1706 2.971 73.36 33.32 38.40
λ =
6.469 2.001 0.3127 2.343 1.790
Table 4: Accuracy, F-score, precision and recall in percent
for Inverted Dirichlet HMM, Generalized Inverted Dirichlet
HMM and Inverted Beta-Liouville HMM applied for occu-
pancy detection dataset.
Model Accuracy F-score precision recall
ID-HMM 80.59 79.25 79.36 84.51
GID-HMM 78.24 85.27 82.87 88.02
IBL-HMM 74.53 86.86 87.93 89.94
5 CONCLUSION
In this paper, we introduce a novel approach for occu-
pancy estimation in smart buildings through HMMs.
Considering the inverted Dirichlet, GID and IBL dis-
tributions as underlying distributions describing the
observation data. The models have been successfully
evaluated on real-data. The goal was to reach an ac-
curate prediction of number of occupants in a room
which plays a key role in smart buildings to reduce
energy consumption. One of the main motivations to
apply these distributions is their flexibility. In addi-
tion, the developed models are based on a recursive
approach, thus the time complexity of the algorithm
Figure 2: Visualization of occupancy estimation data ac-
cording to different features.
reduces to linear time as compared with batch pro-
cessing which in turn causes a substantial decrease in
memory overload and computational resources. Fu-
HMMs Recursive Parameters Estimation for Semi-Bounded Data Modeling: Application to Occupancy Estimation in Smart Buildings
87

ture aspirations could be devoted to improve the ini-
tialization methods. Additionally, due to the impor-
tance of prepossessing data in machine learning mod-
els, to further enhance the model accuracy, feature se-
lection and data quality assessment methods could be
investigated.
REFERENCES
Alawadi, S., Mera, D., Fernandez-Delgado, M., Alkhab-
bas, F., Olsson, C. M., and Davidsson, P. (2020). A
comparison of machine learning algorithms for fore-
casting indoor temperature in smart buildings. Energy
Systems, pages 1–17.
Ali, S. and Bouguila, N. (2022). Towards scalable de-
ployment of hidden markov models in occupancy es-
timation: A novel methodology applied to the study
case of occupancy detection. Energy and Buildings,
254:111594.
Amayri, M., Arora, A., Ploix, S., Bandhyopadyay, S., Ngo,
Q.-D., and Badarla, V. R. (2016). Estimating occu-
pancy in heterogeneous sensor environment. Energy
and Buildings, 129:46–58.
Amayri, M., Ploix, S., Bouguila, N., and Wurtz, F. (2020).
Database quality assessment for interactive learning:
Application to occupancy estimation. Energy and
Buildings, 209:109578.
Bdiri, T. and Bouguila, N. (2012). Positive vectors clus-
tering using inverted dirichlet finite mixture models.
Expert Systems with Applications, 39(2):1869–1882.
Bdiri, T. and Bouguila, N. (2013). Bayesian learning of in-
verted dirichlet mixtures for svm kernels generation.
Neural Computing and Applications, 23(5):1443–
1458.
Bouguila, N. (2012). Infinite liouville mixture models with
application to text and texture categorization. Pattern
Recognition Letters, 33(2):103–110.
Bouguila, N., Fan, W., and Amayri, M. (2022). Hidden
Markov Models and Applications. Springer.
Bourouis, S., Alroobaea, R., Rubaiee, S., Andejany, M.,
M.Almansour, F., and Bouguila, N. (2021). Markov
chain monte carlo-based bayesian inference for learn-
ing finite and infinite inverted beta-liouville mixture
models. IEEE Access, 9:71170–71183.
Bourouis, S., Mashrgy, M. A., and Bouguila, N. (2014a).
Bayesian learning of finite generalized inverted
dirichlet mixtures: Application to object classifi-
cation and forgery detection. Expert Syst. Appl.,
41(5):2329–2336.
Bourouis, S., Mashrgy, M. A., and Bouguila, N. (2014b).
Bayesian learning of finite generalized inverted dirich-
let mixtures: Application to object classification and
forgery detection. Expert Systems with Applications,
41(5):2329–2336.
Ebadat, A., Bottegal, G., Varagnolo, D., Wahlberg, B., and
Johansson, K. H. (2013). Estimation of building oc-
cupancy levels through environmental signals decon-
volution. In Proceedings of the 5th ACM Workshop
on Embedded Systems For Energy-Efficient Buildings,
pages 1–8.
Epaillard, E. and Bouguila, N. (2016). Proportional data
modeling with hidden markov models based on gen-
eralized dirichlet and beta-liouville mixtures applied
to anomaly detection in public areas. Pattern Recog-
nit., 55:125–136.
Erickson, V. L., Carreira-Perpi, M. A., and Cerpa, A. E.
(2014). Occupancy modeling and prediction for build-
ing energy management. ACM Transactions on Sensor
Networks (TOSN), 10(3):1–28.
Fang, K. T., Kotz, S., and Wangng, K. (2018). Symmetric
Multivariate and Related Distributions. Chapman and
Hall/CRC.
Gaetani, I., Hoes, P.-J., and Hensen, J. L. (2016). Occupant
behavior in building energy simulation: Towards a fit-
for-purpose modeling strategy. Energy and Buildings,
121:188–204.
Hu, C., Fan, W., Du, J.-X., and Bouguila, N. (2019). A
novel statistical approach for clustering positive data
based on finite inverted beta-liouville mixture models.
Neurocomputing, 333:110–123.
Kim, D., Yoon, Y., Lee, J., Mago, P., Lee, K., and Cho, H.
(2022). Design and implementation of smart build-
ings: A review of current research trend. Energies,
15:4278.
Koochemeshkian, P., Zamzami, N., and Bouguila, N.
(2020). Distribution-based regression models for
semi-bounded data analysis. In 2020 IEEE Interna-
tional Conference on Systems, Man, and Cybernetics
(SMC), pages 4073–4080. IEEE.
lingmnwah, G. (1976). On the generalised inverted dirichlet
distribution. Demonstratio Mathematica, 9(3):119–
130.
Nasfi, R., Amayri, M., and Bouguila, N. (2020). A novel
approach for modeling positive vectors with inverted
dirichlet-based hidden markov models. Knowledge-
Based Systems, 192:105335.
Nguyen, H., Rahmanpour, M., Manouchehri, N., Maanic-
shah, K., Amayri, M., and Bouguila, N. (2019). A
statistical approach for unsupervised occupancy de-
tection and estimation in smart buildings. In 2019
IEEE International Smart Cities Conference (ISC2),
pages 414–419. IEEE.
Soltanaghaei, E. and Whitehouse, K. (2016). Walksense:
Classifying home occupancy states using walkway
sensing. BuildSys ’16, page 167–176, New York, NY,
USA. Association for Computing Machinery.
Tiao, G. G. and Cuttman, I. (1965). The inverted dirichlet
distribution with applications. Journal of the Ameri-
can Statistical Association, 60(311):793–805.
Vai
ˇ
ciulyt
˙
e, J. and Sakalauskas, L. (2020). Recursive pa-
rameter estimation algorithm of the dirichlet hidden
markov model. Journal of Statistical Computation
and Simulation, 90(2):306–323.
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
88
