
Long-Distance Directional Dial-a-Ride Problems
∗
Grzegorz Gutowski
a
and Grzegorz Herman
b
Theoretical Computer Science, Faculty of Mathematics and Computer Science, Jagiellonian University, Krak
´
ow, Poland
Keywords:
Vehicle Routing, Dial-a-Ride Problem, Local Change Algorithm.
Abstract:
We consider vehicle routing problems that occur in practice in the context of long-distance ride-sharing. On
the one hand, the instances of our problems share the helpful property that the passengers travel in roughly
the same geographical direction. On the other, the required cost function has ordering-dependent components.
For two such problems, we provide heuristic algorithms employing a dynamic programming optimization of
a sliding window in appropriate linear orders. In the first, exemplary problem, we route a single vehicle. In
the second, we route a fleet of vehicles with a coordinated stopover and exchange of passengers. The size of
the sliding window allows for trade-offs between solution qualities and processing times. Both algorithms are
effective and efficient on data sets representing actual travel requests from Hoper, a commercial ride-sharing
service operated by Teroplan S.A. in Poland.
1 INTRODUCTION
In this paper we describe two algorithms for variants
of vehicle routing problems, which are of practical
importance for a company providing a long-distance
door-to-door ride-sharing service. In this setting, the
vehicles and drivers are provided by the operator,
while each passenger requests to travel from an ar-
bitrary pickup to an arbitrary delivery location. The
requests are primarily long-distance, i.e., the travel
distance between pickup and delivery location is in
the order of hundreds of kilometers. The tickets are
usually sold before the travel date and the operator
optimizes the assignment of vehicles and their routes
when all the passenger requests are known.
There is a vast literature on similar problems like
Capacitated Dial-a-Ride (CDARP), Traveling Sales-
man with Pickup and Delivery (PDTSP), or more
generally Vehicle Routing with Pickup and Deliv-
ery (VRPPD), see (Parragh et al., 2008; Molenbruch
et al., 2017; Ho et al., 2018; Tafreshian et al., 2021;
Ritzinger et al., 2022). All of these problems are ver-
sions of the Traveling Salesman Problem with addi-
tional constraints and all are inherently difficult to
solve optimally. There are numerous practical ap-
a
https://orcid.org/0000-0003-3313-1237
b
https://orcid.org/0000-0001-6855-8316
∗
This work has been commissioned by Teroplan S.A.
and partially financed by European Union funds (grant
number: RPMP.01.02.01-12-0572/16-01)
proaches to these problems based on integer linear
programming (Ropke et al., 2007; Cordeau, 2006;
Kikuchi, 1984), dynamic programming (Psaraftis,
1980; Psaraftis, 1983; Desrosiers et al., 1984; Bianco
et al., 1994), and local search (Savelsbergh, 1990;
Healy and Moll, 1995; Renaud et al., 2000; Renaud
et al., 2002).
In the particular case of our application, we have
found that the following natural structure occurs in
the problem instances. With passengers spending a
significant amount of time on board the vehicle, their
natural expectation is for the travel not to take much
longer than necessary. Choosing a ride-sharing op-
erator, they are implicitly accepting some degree of
detours, but should the route stray too much (subjec-
tively) from the direct one, they might become hesi-
tant to choose the same operator again.
On the one hand, this requirement must be repre-
sented in the modeling and influence the optimization
target. On the other, it suggests an important business
level constraint: In order to avoid carrying passengers
a significant distance in the direction perpendicular or
even completely opposite to the one they requested,
it makes sense to assign them initially to a fixed set
of routes, each based on some travel path with a rel-
atively stable long-term direction and serving pickup
and delivery locations not too far from this path. In
our setting, passengers are informed of theses tenta-
tive routes when buying the ticket.
Henceforth, when solving our routing problems,
Gutowski, G. and Herman, G.
Long-Distance Directional Dial-a-Ride Problems.
DOI: 10.5220/0011763600003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 187-197
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
187

we can assume that the instances are directional: all
the passengers in a single instance of a problem travel
roughly in the same geographical direction. This al-
lows us to propose practical solutions which may not
be applicable in general, but turn out to be very effec-
tive and efficient in this particular setting.
Traditionally, the cost function being minimized
in vehicle routing is modeled as the distance in the
graph representing the road network. While the
lengths of individual edges might capture something
more than simply the road distance, such model has
the inherent limitation of being context-insensitive
and does not allow to express the requirement of min-
imizing the detours experienced by individual passen-
gers. In Section 2, we introduce a family of cost func-
tions in which the cost of a segment between succes-
sive vehicle stops might depend on the set of pas-
sengers on board. This captures not only the detour
length, but also other metrics important from the point
of view of passenger experience.
In this paper we present solutions for two prob-
lems with the above properties. In Section 3, we limit
our considerations to routing a single vehicle. This
corresponds to a standard Single Vehicle Capacitated
Dial-a-Ride Problem. For this problem it is possible
to develop algorithms based on the aforementioned
techniques. Still, we present our solution as a gentle
introduction to our method that works well for both
problems. In Section 4 we deal with multiple vehicles
and allow for solutions where passengers can change
their vehicles during a designated time-synchronized
stopover. For this problem we have failed to procure
a working solution based on integer linear program-
ming. The main obstacle for that seems to be the
structure of the selected cost function which is dis-
cussed in detail in Section 2.
Both solutions are based on the local search ap-
proach with the following structure. First, we produce
a heuristic linear ordering of the objects (route points,
or passengers) that is a starting point for the optimiza-
tion process. The final solution is then obtained using
dynamic programming that optimizes every consec-
utive segment of a fixed-length in this ordering. We
call this technique peephole optimization, in parallel
to a similar technique employed by compilers for code
optimization. An important feature of this method is
its flexible window size, allowing for a trade-off be-
tween solution quality and processing time. This be-
comes very desirable when the costs of a large num-
ber of instances need to be estimated, with only a few
of them being actually solved. This happens when we
use the single-vehicle algorithm as a sub-procedure in
the multiple-vehicle algorithm.
We provide experimental evaluation of our meth-
ods on real-world data sets provided by Teroplan S.A.,
a commercial ride-sharing operator offering the ser-
vice in Poland. See Figure 1 for the maps of the routes
that were used in the evaluations. As these data sets
include problems with a very limited number of pas-
sengers, we also show that the same algorithms are
capable of handling larger, artificially constructed, in-
stances.
2 COST FUNCTION
Let us begin by formalizing the optimization criteria.
As mentioned in the Introduction, the typical model
employed in vehicle routing is that of a graph dis-
tance. While elegant in its simplicity and helpful from
the point of view of algorithm design, it is unfortu-
nately too simplistic to capture the priorities occurring
in practical business operations.
The primary customers of a ride-sharing operator
are the passengers. From long-term business perspec-
tive it is thus important to consider not only the op-
erating costs, but also the likelihood of passengers
choosing the same operator in the future.
Based on data gathered by Teroplan S.A., the fol-
lowing quantities influence the perceived quality of
service:
• detour: by how much the distance (or time) trav-
eled by the passenger exceeds the optimal route
they could have taken not sharing a ride;
• stops: how many times the vehicle stops while the
passenger is on board; and
• leeway: with how many other people the passen-
ger travels.
Quite intuitively, passengers prefer to travel on a di-
rect route, without stops, and on a relatively empty
vehicle. Optimization of these goals is very much
against the optimization of operating costs.
It turns out that all of the above can be expressed
in a model, in which the cost of a route segment be-
tween successive vehicle stops is an affine function of
the road distance, with coefficients determined by the
set of passengers on board. Formally, we let the cost
introduced by the segment s be
c
s
:= a
P
s
· d
s
+ b
P
s
,
where P
s
is the set of passengers on board the vehi-
cle (determining the value of coefficients a
P
s
and b
P
s
),
and d
s
is the distance traveled on segment s.
Let us show how such formulation captures the
above aspects of passenger experience.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
188

(a) Single vehicle problem. Data con-
tained requests for 8 of 17 national
routes in Poland gathered for 16 months
(b) Multiple vehicle problem. Data contained requests for an international route
spanning parts of Poland, Germany, Netherlands, and Belgium with stopover
close to Polish-German border gathered for 14 months
Figure 1: Maps of routes used for evaluation of algorithms.
Detour. For each passenger p, let
ˆ
d
p
be the optimal
distance between their requested endpoints. Assume
that the “discomfort” cost of a detour of length d can
be expressed as δ(
ˆ
d
p
) · d for some arbitrary function
δ (this might account for the fact that the same abso-
lute detour might be more acceptable when the opti-
mal route is longer). Letting S
p
be the set of route
segments on which they have been on board, the de-
tour length experienced by passenger p is
∑
s∈S
p
d
s
−
ˆ
d
p
, and the associated cost equals
∑
s∈S
p
δ(
ˆ
d
p
) · d
s
−
δ(
ˆ
d
p
) ·
ˆ
d
p
. The first term can be incorporated in the
total cost of all segments by making δ(
ˆ
d
p
) contribute
to a
P
s
whenever p ∈ P
s
, and the second term does not
depend on vehicle routes and thus is irrelevant for the
optimization.
Stops. The number of “unnecessary” stops experi-
enced by passenger p is |S
p
| − 1. To make each of
them introduce a cost of σ, it is enough to add σ to
b
P
s
whenever p ∈ P
s
.
Leeway. The experience of (lack of) leeway hap-
pens over time. Therefore the appropriate cost com-
ponent for each passenger p over the segment s can
be expressed as some constant λ (possibly depen-
dent on the capacity of the vehicle), multiplied by
d
s
· (|P
s
| − 1). Again, this cost can be incorporated
into our model by increasing a
P
s
by λ · |P
s
|
2
.
Overall, all required aspects of the cost can be
modeled by taking
a
P
s
:=
∑
p∈P
s
δ(
ˆ
d
p
) + λ · |P
s
|
2
and b
P
s
:= σ · |P
s
|,
with the values of δ, σ, and λ calibrated to express the
relative importance of the aspects.
In the practical software implementation of our al-
gorithms there are some more constraints that need to
be considered, like for example a maximal total dis-
tance a vehicle can travel. We have decided not to
discuss them in order to keep the presentation cleaner.
3 SINGLE VEHICLE PROBLEM
In this section we are interested in finding an optimal
route for a single vehicle. The vehicle has a limited
passenger capacity and goes from some initial loca-
tion to some final location. On the way it must serve
a set of passengers, each of whom is to be transported
from their pickup location to their delivery location.
It is worth noting that this problem can be solved
using integer linear programming methods, or even
brute force methods (at least for the instance sizes that
we use to evaluate our method). We present our so-
lution, as it easily scales to larger instances, and the
presentation serves as a gentle introduction to our ap-
proach. In Section 4 we employ the same general ap-
proach to solve a more demanding problem, for which
we didn’t find a solution based on standard methods.
Let us begin by specifying the problem more for-
mally. We are given a set X of geographic locations.
These include the pickup and delivery locations re-
quested by the passengers, and initial and final loca-
tions of the vehicle. Locations can be represented by
vertices of a strongly connected directed graph mod-
eling the road network. However, as detailed routes
are not really relevant to our solution, we will assume
the graph to be the complete graph on X, with the road
distance between each pair of locations x and y given
as d
x,y
.
Next, we have a set P of passengers to be trans-
ported, with pickup and delivery locations of a pas-
senger p denoted by p
in
and p
out
, respectively. Each
location might be requested as a pickup and/or deliv-
Long-Distance Directional Dial-a-Ride Problems
189

ery location by some numbers of passengers. In case
of a point which is simultaneously a pickup and a de-
livery location, it always makes sense to let the pas-
sengers being delivered leave the vehicle before the
ones being picked up board it. Therefore we can fo-
cus on the net occupancy change at each point x ∈ X,
computed as
c
x
:= |{p ∈ P : p
in
= x}| − |{p ∈ P : p
out
= x}|.
The vehicle has a limited passenger capacity c, be-
gins the journey at location x
0
with no passengers on
board, visits every location in X exactly once, and fin-
ishes at location x
n
after all passengers have been de-
livered.
Now, a solution to the single vehicle problem is a
linear ordering ≺ on X, satisfying the following va-
lidity constraints:
• the vehicle starts and ends as specified: ∀x ∈
X : x
0
≼ x ≼ x
n
,
• every pickup location is visited before the corre-
sponding delivery location:
∀p ∈ P : p
in
≼ p
out
, and
• vehicle capacity is never exceeded: ∀x ∈ X : c ≥
∑
y≼x
c
y
.
Whenever a particular ordering is clear from the con-
text, we might refer to its consecutive locations using
indices: x
0
≺ x
1
≺ ... ≺ x
n
.
To specify optimization criteria, we need to mea-
sure the cost of a particular solution. The detailed
composition of a practical cost function has been dis-
cussed in Section 2. Here, we only assume it to have
the following general properties:
1. The total cost of the solution can be expressed as
the sum of costs of the route segments between
successively visited locations.
2. The cost of each segment might depend on the
road distance d covered on this segment and on
the set V ⊆ X of locations already visited, but not
on the order in which they are visited. This seg-
ment cost function will be denoted as κ(V,d).
Note that the penalties discussed in Section 2 can be
easily expressed in this way, because the set of visited
locations implies the actual set of passengers on board
the vehicle.
Overall, we wish to optimize
κ
≺
:=
n−1
∑
i=0
κ({x
0
,... ,x
i
},d
x
i
,x
i+1
),
over all linear orders ≺ satisfying the validity con-
straints. Note, that while our algorithms can work
with arbitrary κ(V,d), for the purpose of experimen-
tal evaluation we use the simplest possible function
κ(V,d) = d that implies optimization of the total dis-
tance traveled by the vehicle.
Being a generalization of the asymmetric Travel-
ing Salesman Problem, this problem is computation-
ally hard (NPO-hard), even when the cost function
satisfies the triangle inequality. The best known ap-
proximation ratio for the problem without additional
constraints is 22 + ε (Traub and Vygen, 2020). Thus,
practical solutions, including the one presented in this
work, employ various heuristics.
As outlined in the Introduction, our approach con-
sists of two phases. First, we construct an initial or-
dering of locations satisfying the validity constraints.
Then, we optimize this solution by considering all its
viable “local” reorderings.
While multiple methods following this general
scheme are known in the literature, none of them take
advantage of the specific nature of our problem in-
stances, discussed in Section 1. Compared, for ex-
ample, to the classic cut-and-rejoin local search al-
gorithm by Lin (Lin, 1965), our optimization phase
can efficiently consider larger reshufflings by limiting
them to segments of the initial ordering.
We provide more details on both phases in the fol-
lowing subsections.
3.1 Initial Ordering
Let us begin by constructing the initial ordering of
locations. We will not attempt to make it a cost-wise
approximation of the optimum. Instead, we want it to
be “similar” to the optimum wrt. the indices occupied
by particular locations (we will formalize this notion
near the end of Section 3.2).
To this aim, we exploit the assumption of all pas-
sengers sharing a general direction of travel. For each
passenger p, we construct the vector v
p
representing
the direction from p
in
to p
out
. From all v
p
, we com-
pute the average
1
direction v which should represent
the general direction of travel. Finally, we assign pri-
orities to the locations, highest priority to x
0
, lowest
to x
n
, and decreasing priorities to other locations in
the order of their projection on the average direction
v.
The resulting order given by the priorities might
still violate precedence and capacity constraints.
While the second phase of our approach does not for-
mally require them to be satisfied, it only ever consid-
ers orders “similar” to the initial one and thus will fail
to find a solution if none of those are valid. This issue
1
The average might be weighted, with weights depend-
ing non-linearly on the distances between pickup and deliv-
ery locations.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
190

is easily fixed by making sure that the order is valid
up front.
To achieve this we use the following procedure.
We construct the order by adding locations at the end
one by one. In each step we consider each loca-
tion which has not yet been added and which, when
added at the end, would not violate any of the con-
straints. Among such locations we select the one with
the highest priority.
The above process is easily implemented in time
O(cn + n logn). While in general it does not guaran-
tee to find a valid order even if one exists,
2
we have
never observed such failure in practice.
3
Indeed, the
orders produced are usually very close to the “purely
projective”. Important discrepancies show up in areas
of mixed pick-ups and deliveries, in which locations
further down the route might need to be visited earlier
in order to prevent capacity constraint violation.
3.2 Peephole Optimization
Given an initial ordering x
0
≺ x
1
≺ .. . ≺ x
n
of loca-
tions, we can frame the peephole optimization algo-
rithm as dynamic programming.
Fixing a parameter w, called the window length,
and denoting by I the set {0,. . .,n} of location in-
dices, each sub-problem
⟨
k,W, j
⟩
to be solved will be
parameterized by:
• a prefix length k ∈ I,
• a window W ⊆ {k + 1, . .. ,k + w} ∩ I, and
• a final index j ∈ W ∪ {k}.
The solution to the sub-problem
⟨
k,W, j
⟩
will be the
(locally) optimal order of visiting all the locations that
are either in W , or no later than k-th in ≺, i.e., loca-
tions V
k,W
:= {x
0
,... ,x
k
}∪{x
i
: i ∈W }, with x
j
com-
ing last. In particular, the whole problem is captured
as the sub-problem
⟨
n,∅,n
⟩
.
A sub-problem
⟨
k,W, j
⟩
is deemed viable if it sat-
isfies the following conditions:
• j = 0 implies W = ∅ (no location can be visited
before x
0
),
2
For an example, consider six passengers
A,B,C, D, E,F and a linear route with six points:
A
in
,B
in
,A
out
= C
in
= D
in
,B
out
= E
in
= F
in
,C
out
=
D
out
,E
out
= F
out
. A vehicle with capacity 2 can handle this
route, but not once it has picked up both A and B.
3
Should such unfortunate case ever occur, one can deal
with it by artificially duplicating each location so that all
pickup and delivery locations are distinct. This might cause
some geographical locations to be visited more than once,
but guarantees to find a valid order, in the worst case serving
the passengers one-by-one.
• p
out
= j implies p
in
∈ V
k,W
(passengers delivered
at the last location have been picked up earlier),
and
• c ≥
∑
y∈V
k,W
c
y
(the set of visited locations meets
capacity constraints).
A sub-problem
⟨
k,W, j
⟩
is called canonical if ei-
ther k = 0 or k + w ∈ W . When neither of these
holds then W ∪ {k} is a correct window for prefix
length k −1, V
k,W
=V
k−1,W ∪{k}
, and one could replace
sub-problem
⟨
k,W, j
⟩
by the equivalent sub-problem
⟨
k − 1,W ∪ {k}, j
⟩
. Thus, every non-canonical sub-
problem can be reduced to a canonical one, while
non-viable ones can either be assigned infinite cost
or completely removed from the consideration.
We wish to define locally optimal solution for
a sub-problem, inductively, as a solution that ex-
tends some locally optimal solution for a smaller
sub-problem by visiting one location more and op-
timizing cost over all such extensions. More for-
mally, locally optimal solution to viable canonical
sub-problem
⟨
k,W, j
⟩
is naturally defined as follows:
• j = 0. The only viable sub-problem here is
⟨
0,∅,0
⟩
, with zero cost.
• j = k > 0. With location x
k
visited last, the pre-
fix length of the sub-problem covering the re-
maining locations must have been smaller than k.
But then, with k + w ∈ W , such situation cannot
be expressed by our parameterization (its window
would also need to contain k + w, exceeding its
allowed size) and thus will simply not be consid-
ered. We thus return an infinite cost. This is a
place in which our solution might not be globally
optimal.
• j > k, j < k + w. With neither x
k
, nor x
k+w
vis-
ited last, the prefix length of the preceding sub-
problem must be the same. This sub-problem
might thus have been
⟨
k,W \ { j}, j
′
⟩
, for an arbi-
trary (legal) j
′
. We consider all of them, augment
their solutions by the segment from x
j
′
to x
j
, and
choose the one with minimal cost.
• j = k + w. This case is similar to the previous
one, but we allow the prefix length of the preced-
ing sub-problem to be smaller. This sub-problem
might have been
⟨
k
′
,W
′
, j
′
⟩
for an arbitrary (le-
gal) k
′
≤ k, k
′
≥ k − w, j
′
, and W
′
= {k
′
+ 1,k
′
+
2,... ,k} ∪W \ { j}.
Note how the properties assumed of the cost func-
tion fit nicely into this setting. For each transition
between successive sub-problems, their parameteri-
zations prescribe the set of visited locations and the
endpoints (and thus the road distance) of the corre-
sponding segment, and hence its cost. With the costs
Long-Distance Directional Dial-a-Ride Problems
191

being additive, we only need to remember the cost-
optimal solution to each sub-problem.
Note also, that while viability of
⟨
n,∅,n
⟩
does not
by itself imply the validity of the constructed order,
the algorithm is in fact correct. This is because its re-
sult is obtained from a sequence of solutions to viable
sub-problems with successively larger V
k,W
’s. In such
a sequence, the second and third conditions on via-
bility imply respectively the precedence and capacity
constraints.
The number of sub-problems is Θ(nw2
w
), leading
to the running time of Θ(nw
2
2
w
). One might even
take w := n, making our algorithm a direct analogue
of the standard dynamic programming solution to the
traveling salesman problem (Bellman, 1962; Held and
Karp, 1962), guaranteed to find the global optimum.
This course of action might be viable when solving a
relatively small number of instances with small n.
When the number of instances considered be-
comes large, foregoing global optimality by lowering
the window length might be necessary to obtain prac-
tical running times. Such situations occur naturally
when the passengers are to be split between multiple
vehicles, an example of which will be discussed in
Section 4.
To capture the situations in which our algorithm
behaves optimally, let us formally capture the notion
of “similar” orders:
Definition 1. A permutation π : I 7→ I is w-local iff
for all indices i, j ∈ I
π(i) − π( j) ≥ w =⇒ i > j.
We can now prove the following:
Proposition 2. For an initial order x
0
≺ . . . ≺ x
n
and a w-local permutation π : I 7→ I such that π(≺
) := x
π(0)
,... ,x
π(n)
is a solution (i.e., satisfies valid-
ity constraints), peephole optimization of ≺ with win-
dow length w returns a result with cost no worse than
κ
π(≺)
.
Proof. Let us show that for every r = 0, . ..,n, there
exists a viable sub-problem
⟨
k,W, j
⟩
with j = π(r),
for which V
k,W
= {x
π(0)
,... ,x
π(r)
}.
We proceed by induction on r. For r = 0, we
have π(0) = 0, and sub-problem
⟨
0,∅,0
⟩
satisfies the
conditions. Now, assume
⟨
k,W, j
⟩
is a viable sub-
problem with j = π(r) and V
k,W
= {x
π(0)
,... ,x
π(r)
}.
Among different equivalent representations of the
sub-problem, we choose the one, possibly non-
canonical, that maximizes k. For this representation,
we have k + 1 /∈ W.
Let j
′
= π(r + 1). If j
′
= k + 1, then
⟨
k + 1,W,k + 1
⟩
is a viable sub-problem satisfying the
conditions for r + 1. Otherwise, we have that k + 1 =
π(r
′
) for some r
′
> r + 1. The assumption on π being
w-local gives that j
′
= π(r + 1) < π(r
′
) + w ≤ k + w,
and
⟨
k,W ∪ { j
′
}, j
′
⟩
is a viable sub-problem satisfy-
ing conditions for r + 1.
As an immediate consequence we get that when-
ever some globally optimal solution is a w-local per-
mutation of the initial order, our algorithm is optimal.
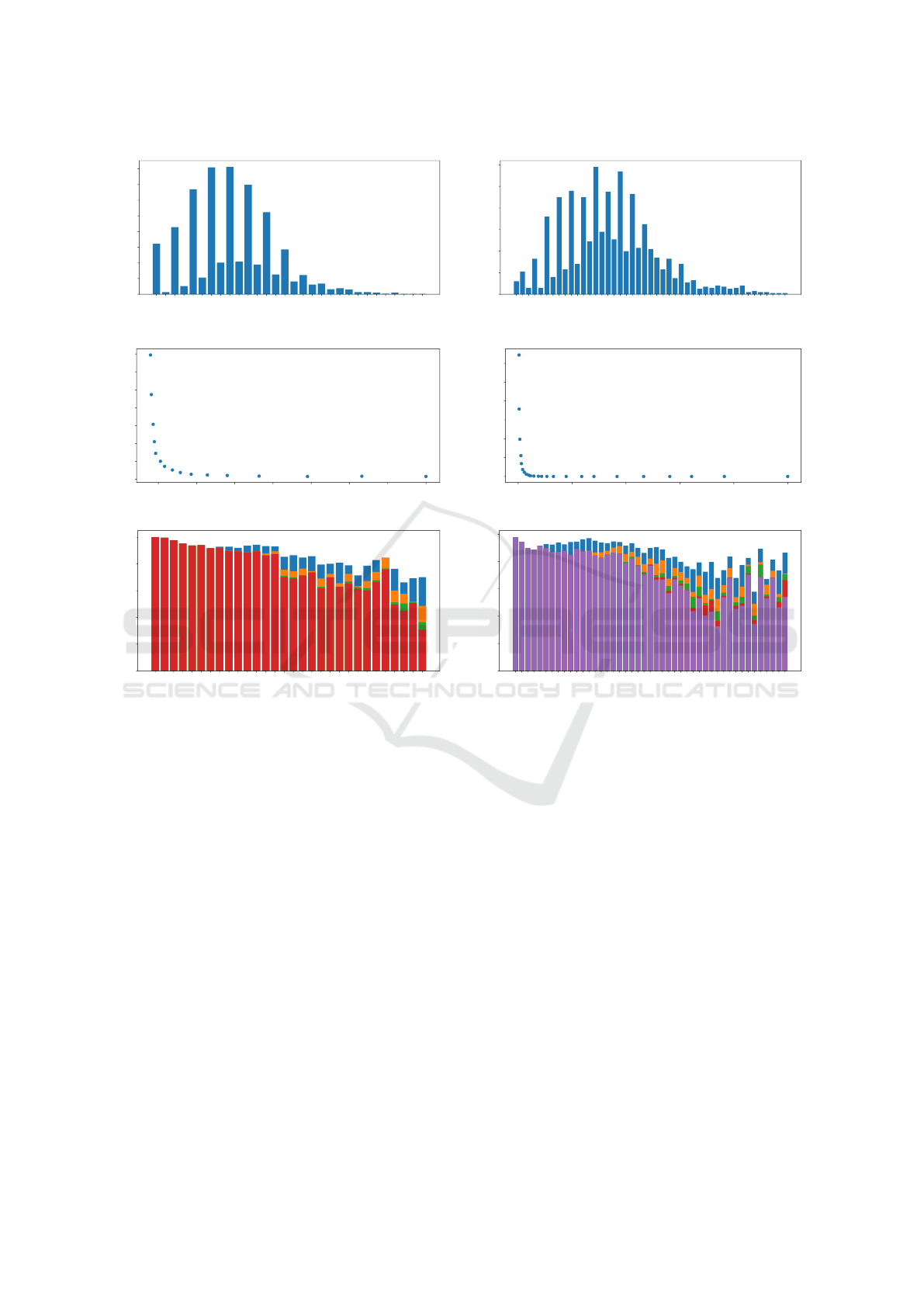
3.3 Evaluation
The experimental data for this problem comes from
the operation of the Hoper ride-sharing service. Pas-
senger requests for 8 different travel routes, out of 17
routes depicted in Figure 1a, have been gathered for
16 months, giving 2970 test cases in total. The ve-
hicles used on these routes were able to accommo-
date 8 passengers. On average, there are 12.2 points
to arrange per test case. Figure 2a shows the dis-
tribution of instance sizes. Observe that the size is
more often an even number (which is to be expected
when pickup and delivery locations are all different).
It seems that at least some of the larger instances were
not really handled by a single vehicle (the best solu-
tions for these cases require to travel more than 2000
kilometers), but we have decided to keep them as they
are.
As mentioned before, for evaluation purposes, we
use κ(V, d) = d as the segment cost, and effectively
we optimize the total distance traveled by the vehi-
cle. The heuristic solution applied to all the test cases
takes 1.6 seconds of CPU time
4
and finds routes with
the total distance of 2092549 kilometers. The algo-
rithm with window size set to 16 takes 70 seconds
to compute and gives routes with the total distance
of 1790980 kilometers, saving just above 100 kilo-
meters on average per test case. Solving the largest
test case with 33 locations takes 0.88 seconds to com-
pute. Figure 2c shows the processing time and the to-
tal travel distance for other values of the window size.
Figure 2e shows the quality gain for different sizes of
test cases (measured in the number of locations) for
window sizes 4, 8, 12, and 16.
It is worth noticing that most, but not all, of the
cases in this data set can easily be solved by a brute-
force algorithm that checks all the possible orderings
of the locations. In order to evaluate our solution on
larger instances we have artificially constructed a new
data set, where each test case is constructed from two
cases corresponding to the same route in the origi-
nal data set by combining the passenger requests and
4
All computations were performed on a single core of
an Intel Xeon Gold 6154 processor
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
192
4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33
number of locations
0
50
100
150
200
250
300
350
400
number of instances
Instance Size Histogram
(a) Instance sizes in real data
6 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 49 50 51 53
number of locations
0
20
40
60
80
100
120
number of instances
Instance Size Histogram
(b) Instance sizes in doubled data
0.86 0.88 0.90 0.92 0.94 0.96 0.98 1.00
total travel distance (scaled to heuristic)
0
10
20
30
40
50
60
70
total CPU time [s]
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
heuristic
Quality/Processing Time for Different Window Size
(c) Quality/Time in real data
0.75 0.80 0.85 0.90 0.95 1.00
total travel distance (scaled to heuristic)
0
10000
20000
30000
40000
50000
60000
total CPU time [s]
2345
67
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
heuristic
Quality/Processing Time for Different Window Size
(d) Quality/Time in doubled data
4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33
number of locations
0.0
0.2
0.4
0.6
0.8
1.0
total travel distance (scaled to heuristic)
(e) Quality for different instance sizes in real data. Total
distance is scaled to heuristic solution. Different window
sizes correspond to colors: 16-red, 12-green, 8-orange, 4-
blue
6 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 49 50 51 53
number of locations
0.0
0.2
0.4
0.6
0.8
1.0
total travel distance (scaled to heuristic)
(f) Quality for different instance sizes in doubled data. Total
distance is scaled to heuristic solution. Different window
sizes correspond to colors: 24-purple, 16-red, 12-green, 8-
orange, 4-blue
Figure 2: Experimental results for single vehicle problem.
doubling the capacity of the vehicle. This way we ob-
tain 1842 test cases with vehicles of size 16 and 22.2
locations to visit on average. Figure 2b shows the dis-
tribution of instance sizes, and Figure 2d shows the
processing time and the total travel distance for dif-
ferent window sizes. Figure 2f shows the quality gain
for different sizes of test cases (measured in the num-
ber of locations) for window sizes 4, 8, 12, 16, and 24.
The evaluation shows that the window size 20 for
the artificially constructed tests with vehicle of capac-
ity 16 is still computable within one minute even for
the test cases with over 50 locations and gives solu-
tions that are difficult to improve by increasing the
window size further.
4 MULTIPLE VEHICLES
PROBLEM
We now turn to the more demanding problem of rout-
ing multiple vehicles. The general discussion from
the Introduction still applies: the passengers in each
problem instance are assumed to apply for the same
route, thus requesting a similar direction of travel.
When the geographical area covered by the route
is a narrow strip, the paths chosen for individual ve-
hicles are not expected to be drastically different, and
thus optimizing the assignment of passengers might
not be as important as optimizing the route of each
vehicle. However, with multiple vehicles available it
makes sense to consider serving wider areas, with the
hope of grouping passengers with similar direct path
Long-Distance Directional Dial-a-Ride Problems
193

between pickup and delivery locations into the same
vehicle.
Moreover, as the travel is expected to take signifi-
cant time, and thus stopovers are a near necessity for
both the passengers and the drivers, it makes sense to
look for solutions where passengers change vehicles
during a stopover. The vehicles participating in such
an exchange must be coordinated time-wise, and thus
only a single exchange will be considered. This is
however enough to make the grouping of (most) pas-
sengers according to their pickup locations indepen-
dent from the grouping according to their delivery lo-
cations, enabling effective handling of a much greater
diversity of possible requests.
With a single designated exchange location in
place, the whole problem might be split into two sym-
metric sub-problems: routing the vehicles from their
initial locations to the exchange, and routing them
from the exchange to their final locations. With the
two being symmetric, we will focus our attention only
on the first one. Note however, that while one can
reasonably expect the pickup and delivery locations
of the majority of passengers to lie respectively be-
fore and after the exchange point, we still need to ac-
commodate passengers with both pickup and delivery
location visited before the exchange location.
The formal setting of our multiple vehicle prob-
lem is thus as follows. The set of locations X together
with their distances d
x,y
, the set of passengers P with
their pickup and delivery locations p
in
and p
out
, vehi-
cle capacity c and the segment cost function κ(V,d)
are as specified in Section 3. However, we are now
given a fleet of m vehicles
5
with common initial and
final locations z
in
,z
out
∈ X (the latter, being the ex-
change point, is also expected to be the delivery loca-
tion of multiple passengers).
Also, due to the route still having a general direc-
tion, and the nature of the split, most of the locations
in X are expected to lie in a common half-plane.
As stated, the problem lies in between the Ca-
pacitated Vehicle Routing Problem and Vehicle Rout-
ing Problem with Pickup and Delivery (CVRP and
VRPPD; see, e.g., the survey (Toth and Vigo, 2001)
for an exposition on both). The full solution needs
to consist of an assignment of passengers to vehicles,
and the routing of each vehicle (i.e., a valid order of
pickup and delivery locations of passengers assigned
to it).
5
For simplicity, we consider all vehicles to be essen-
tially identical, i.e., with the same capacity, cost function,
and initial location. The algorithm presented here does gen-
eralize to a non-homogeneous vehicle fleet, but its presen-
tation becomes much more complex, and its complexity
grows significantly with fleet diversity, which makes it im-
practical for more than a few types of vehicles.
A priori there are no constraints on the passenger
assignment. We do not even have to directly obey the
capacity constraint, as a vehicle will in general serve
more passengers than its capacity. In practice, we will
however limit the number of “exchange” passengers
(i.e., those being delivered to the exchange point) as-
signed to each vehicle to c to avoid visiting the ex-
change point more than once, and the total number of
passengers assigned to each vehicle to no more than
2c to limit the number of additional stops on the way.
Multiple known heuristic approaches to CVRP
variants consist of two phases, following either a
cluster-then-route or a route-then-cluster scenario.
Here, having already presented a viable solution for
the single vehicle problem which successfully takes
advantage of our specific setting, we follow the
cluster-then-route path. Restricting our attention to
the yet unsolved part of the problem, we thus define
the solution as an assignment of passengers to vehi-
cles. Note however, that the single-vehicle algorithm
will be employed not only after the assignment has
been formed, but also (possibly with a smaller win-
dow size) to provide the cost estimation for many
other possible assignments.
Our proposed solution to the assignment problem
consists of two inner phases, analogous to those in the
single-vehicle case. First, we heuristically construct
an initial linear order on the passengers. Then, we ap-
ply dynamic programming following that order to ob-
tain a “locally optimal” assignment. The two phases
will be discussed in detail in the following subsec-
tions.
4.1 Initial Ordering
The goal of the first phase is to construct an ordering
of passengers. This time there is not even an obvi-
ous notion of an optimal order. Instead, preparing the
ground for the peephole optimization, we want the
passengers traveling together in an optimal solution
to be placed not too far from each other, index-wise.
The basic observation that we want to exploit is
that, modulo the relatively few passengers not being
delivered to the exchange, crossing vehicle paths are
usually sub-optimal. It then seems reasonable for in-
dividual vehicles to “cover” geographically disjoint
areas, and such areas, all touching the exchange point,
can be naturally ordered angularly around it.
This suggests that a good initial order might be
formed by ranking passengers by the angle (direction)
from their pickup location to the exchange. Unfor-
tunately, this turns out not to be the case. We have
implemented such heuristic and found it not to be sat-
isfactory. It seems, that the reason for this is that the
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
194

angular differences in direction of travel do not trans-
late well to operating costs. For the same angular dif-
ference, the cost of traveling between two locations
heavily depends on their distances to the exchange
point, which is not reflected in such an ordering. Even
for locations with these distances similar, the costs
may vary significantly, because the road network is
usually not very uniform.
To better capture the actual distances (and thus,
better approximate the actual operating costs), we
propose a different heuristic. First, we introduce a
measure
6
of dissimilarity between any pair of pas-
sengers p and q, intuitively capturing the additional
cost of serving them with the same vehicle. Denoted
by δ
p,q
, it is formally defined as the difference be-
tween:
• the travel distance of an optimal route serving
both p and q, and
• the larger of the travel distances of optimal routes
serving either only p, or only q.
To form the ordering, we first find the pair of most
dissimilar passengers q and r, who will be ranked
first and last, respectively. The remaining passengers
are ranked based on their relative dissimilarity to q
and r: passenger p receives a rank equal to
δ
p,q
δ
p,q
+δ
p,r
.
Note that this strategy only makes sense because of
our expectation about the pickup locations occupying
a common half-plane. Otherwise, one could easily
imagine the order produced to alternate between the
two half-planes split by the line connecting the loca-
tions of q and r. It is hard to imagine that assignments
based on such ordering can be close to the optimal
solution.
4.2 Peephole Optimization
Given a suitable ordering of passengers, an assign-
ment could now be obtained by splitting the ordering
in m − 1 places and assigning these groups to individ-
ual vehicles; this is easily done by dynamic program-
ming, requiring time Θ(n · m · c) and Θ(n · c) single-
vehicle queries.
However, it turns out that a significant improve-
ment can again be obtained by optimizing consec-
utive fixed-size windows. With the initial ordering
p
0
,... , p
n−1
of passengers, the set of indices I :=
{0,... ,n − 1}, and a fixed window size w, each sub-
problem
⟨
k,W,l
⟩
in appropriate dynamic program-
ming is parameterized by:
• a prefix length 0 ≤ k ≤ n,
6
Note, that this measure, while non-negative and sym-
metric, is not in general a metric.
• a window W ⊆ {k − 1, . .. ,k − w} ∩ I, and
• a vehicle count 0 ≤ l ≤ m.
In the sub-problem
⟨
k,W,l
⟩
, we are interested in
the (locally) optimal assignment of the passengers
from the set P
k,W
:= {p
0
,... , p
k−1
} \ {p
i
: i ∈ W }
to a fleet of at most l vehicles. The whole problem is
captured by sub-problem
⟨
n,∅,m
⟩
.
To simplify the exposition below, let us first note
that we only need to consider the sub-problems for
which k − 1 /∈ W . We call these sub-problems canon-
ical. This is because each non-canonical sub-problem
⟨
k,W,l
⟩
(i.e., with k − 1 ∈ W ) can be replaced by an
equivalent sub-problem
⟨
k − 1,W \ {k − 1},l
⟩
.
The solutions to sub-problems are now found as
follows:
• l = 0. The only viable canonical sub-problem in
this case is
⟨
0,∅,0
⟩
, with zero cost.
• l > 0. For a sub-problem
⟨
k,W,l
⟩
, let us consider
the set of passengers U which can be assigned
to a single vehicle. Following the peephole prin-
ciple, we only allow placing together passengers
from a common window. Thus, we consider each
U ⊆ {k − 1, .. ., k − w} \W (in fact, with indistin-
guishable vehicles, one may limit this by requir-
ing that either U = ∅, or k − 1 ∈ U , by focus-
ing on the vehicle to which passenger p
k−1
gets
assigned). The remaining passengers must have
been assigned to the remaining vehicles, lead-
ing to the (possibly non-canonical) sub-problem
⟨
k,W ∪U,l − 1
⟩
.
There are Θ(n · m · 2
w
) sub-problems to be solved,
and the total time complexity of the algorithm is
Θ(n · m · 3
w
) (as there are 3
w
pairs of disjoint subsets
of {k − 1,... , k − w}), not counting the time needed
to answer single-vehicle queries. The latter becomes
an important consideration, as there are Θ(n · 2
w
) of
these queries. If we employ the algorithm from Sec-
tion 3 with window size w
′
, the time required to an-
swer all the queries will be Θ(n · 2
w
· c · w
′
2
· 2
w
′
). For
w
′
+2 log
2
w
′
> (log
2
3−1)w +log
2
m−log
2
c+Θ(1)
it becomes the dominating component of the time
complexity.
The window size w for this algorithm needs to be
at least c (the capacity of a single vehicle), as oth-
erwise not all seats will be occupied. However, for
better results, we suggest the window size of about
2c. This accounts for the passengers with delivery
locations before the exchange, and allows “consecu-
tive” vehicles to exchange some passengers. As we
expect many of the passengers to visit the exchange
location, we don’t expect the number of locations in
calls to the algorithm from Section 3 to exceed 2c by
much. Thus, it is reasonable to expect that setting
Long-Distance Directional Dial-a-Ride Problems
195

w
′
= c should give a good enough approximation of
optimal solutions. With these values of w and w
′
we
get that the algorithm runs in Θ(n · m · 9
c
+ n · c
3
· 8
c
).
4.3 Evaluation
The experimental data for this problem comes from
the operation of an undisclosed cross-border long-
distance ride-sharing service which was provided to
us by Teroplan S.A. Passenger requests for a single
cross-border travel route have been gathered for 14
months. Operator of the route used a fleet of a dozen
of vehicles, each able to accommodate 8 passengers.
Operator used a single exchange location, which was
situated close to the Polish-German border, see Fig-
ure 1b. All the vehicles were required to make a time-
synchronized stop at the exchange location. Almost
all of the passengers visited the exchange location and
crossed the border. After adjusting data for our prob-
lem, and filtering out instances where only one vehi-
cle was enough to serve the passenger requests, we
have obtained 177 test cases. Majority of the cases
are served with only two vehicles, but there is also
a case where 8 vehicles are necessary. On average,
there are 19.4 pickup/delivery locations to arrange per
test case. Figures 3a and 3b show the distributions
of instance sizes measured in the number of vehicles
used to serve the requests and the number of travel
points, respectively.
The algorithm with window size w = 16 and us-
ing window size w
′
= 8 for estimation of the single
vehicle ride cost of a single vehicle ride takes 5620
seconds to compute and gives routes with the total
distance of 339993 kilometers. For comparison, algo-
rithm with window size 8 takes 15.2 seconds to com-
pute and gives routes of total distance 346117 kilo-
meters. Changing the value of w
′
(between 4 and 16)
does not influence running time, or quality of solu-
tions by much. Increasing w higher also does not
bring any important increase in the quality of solu-
tions, but the processing time quickly becomes an is-
sue. See Figure 3c for a comparison of running time
and solution quality for different values of w.
5 SUMMARY
We have presented two heuristic algorithms for vehi-
cle routing problems, with a parameter, window size,
controlling their time-vs-quality trade-off. Experi-
mental evaluation has shown that with a proper choice
of window sizes the algorithms can be both effective
and efficient on data sets representing actual travel re-
quests. In fact, the approach has been developed into
2 3 4 5 6 7 8
number of buses
0
20
40
60
80
100
number of instances
Instance Size Histogram
(a) Vehicle counts in multi data
8 9 10 11 12 13 14 15 16 17 18 19 21 22 23 24 26 27 28 29 30 31 32 33 34 35 37 38 40 41 42 44 45 47 48 56
number of locations
0
5
10
15
20
25
number of instances
Instance Size Histogram
(b) Location counts in multi data
340000 341000 342000 343000 344000 345000 346000
total travel distance [km]
0
2000
4000
6000
8000
10000
12000
14000
total CPU time [s]
8
9
10
11
12
13
14
15
16
17
Quality/Processing Time for Different Window Size
(c) Quality/Time in multi data
Figure 3: Experimental results for multiple vehicle prob-
lem.
a practical software solution which is used to route ve-
hicles on a daily basis by Hoper, a commercial long-
distance ride-sharing operator.
In both cases, the proposed heuristic exploits the
fact that the requests in each problem instance share a
common general direction of travel. Still, we believe
that the more general approach—looking for an effi-
ciently computable, linear ordering of objects that is
close (as a permutation) to an optimal one, and sub-
sequently processing it with peephole optimization—
might also be applicable to other optimization prob-
lems.
REFERENCES
Bellman, R. (1962). Dynamic programming treatment of
the travelling salesman problem. Journal of the ACM,
9(1):61–63.
Bianco, L., Mingozzi, A., and Ricciardelli, S. (1994). A
set partitioning approach to the multiple depot vehicle
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
196

scheduling problem. Optimization Methods and Soft-
ware, 3(1-3):163–194.
Cordeau, J.-F. (2006). A branch-and-cut algorithm for the
dial-a-ride problem. Operations Research, 54(3):573–
586.
Desrosiers, J., Dumas, Y., and Soumis, F. (1984). A dy-
namic programming solution of the large-scale single-
vehicle dial-a-ride problem with time windows. Amer-
ican Journal of Mathematical and Management Sci-
ences, 6(3-4):301–325.
Healy, P. and Moll, R. (1995). A new extension of local
search applied to the dial-a-ride problem. European
Journal of Operational Research, 83(1):83–104.
Held, M. and Karp, R. M. (1962). A dynamic program-
ming approach to sequencing problems. Journal of
the Society for Industrial and Applied Mathematics,
10(1):196–210.
Ho, S. C., Szeto, W., Kuo, Y.-H., Leung, J. M., Peter-
ing, M., and Tou, T. W. (2018). A survey of dial-a-
ride problems: Literature review and recent develop-
ments. Transportation Research Part B: Methodolog-
ical, 111:395–421.
Kikuchi, S. (1984). Scheduling of demand-responsive tran-
sit vehicles. Journal of Transportation Engineering,
110(6):511–520.
Lin, S. (1965). Computer solutions of the traveling sales-
man problem. The Bell System Technical Journal,
44(10):2245–2269.
Molenbruch, Y., Braekers, K., and Caris, A. (2017). Ty-
pology and literature review for dial-a-ride problems.
Annals of Operations Research, 259(1):295–325.
Parragh, S. N., Doerner, K. F., and Hartl, R. F. (2008).
A survey on pickup and delivery problems: Part II:
Transportation between pickup and delivery locations.
Journal f
¨
ur Betriebswirtschaft, 58:81–117.
Psaraftis, H. N. (1980). A dynamic programming solu-
tion to the single vehicle many-to-many immediate
request dial-a-ride problem. Transportation Science,
14(2):130–154.
Psaraftis, H. N. (1983). Analysis of an O(N
2
) heuristic for
the single vehicle many-to-many Euclidean dial-a-ride
problem. Transportation Research Part B: Method-
ological, 17(2):133–145.
Renaud, J., Boctor, F. F., and Laporte, G. (2002). Pertur-
bation heuristics for the pickup and delivery travel-
ing salesman problem. Computers & Operations Re-
search, 29(9):1129–1141.
Renaud, J., Boctor, F. F., and Ouenniche, J. (2000). A
heuristic for the pickup and delivery traveling sales-
man problem. Computers & Operations Research,
27(9):905–916.
Ritzinger, U., Puchinger, J., Rudloff, C., and Hartl, R. F.
(2022). Comparison of anticipatory algorithms for a
dial-a-ride problem. European Journal of Operational
Research, 301(2):591–608.
Ropke, S., Cordeau, J.-F., and Laporte, G. (2007). Models
and branch-and-cut algorithms for pickup and delivery
problems with time windows. Networks, 49(4):258–
272.
Savelsbergh, M. W. P. (1990). An efficient implementa-
tion of local search algorithms for constrained rout-
ing problems. European Journal of Operational Re-
search, 47(1):75–85.
Tafreshian, A., Abdolmaleki, M., Masoud, N., and Wang,
H. (2021). Proactive shuttle dispatching in large-
scale dynamic dial-a-ride dystems. Transportation
Research Part B: Methodological, 150:227–259.
Toth, P. and Vigo, D., editors (2001). The Vehicle Rout-
ing Problem. Discrete Mathematics and Applications.
SIAM.
Traub, V. and Vygen, J. (2020). An improved approxima-
tion algorithm for ATSP. In Proceedings of the 52nd
Annual ACM SIGACT Symposium on Theory of Com-
puting, STOC 2020, pages 1–13.
Long-Distance Directional Dial-a-Ride Problems
197
