
An Analysis of Teaching Informatics by Means of Enactive-Haptic
Representations
Lisa G
¨
obel
a
, Lutz Hellmig and Alke Martens
b
Institute of Informatics, University Rostock,
Albert-Einstein-Straße 22, 18059 Rostock, Germany
Keywords:
Informatic Concepts, Enactive-Haptic Representation, Teachers, Computer Science and Media Education,
Computer Science Unplugged.
Abstract:
The subject of computer science is gaining more and more important. But how are computer science concepts
taught? The use of enactive-haptic representation can be an option, which is however quite unknown in
computer science education. Partly, this is due to the fact that enactive-haptic is a blurred concept, which is
not easy to grasp in the context of digital technology. In this paper, the term enactive-haptic is analyzed in the
context of computer science. The resulting model and its usage are sketched in this paper.
1 INTRODUCTION
Nowadays, a lot of people call for education in the
field of Artificial Intelligence (AI) in school educa-
tion, accompanied with the claim that kids should
learn up-to-date technology (C. A. Heinze, 2010).
However, we have learned in different investiga-
tions, that first of all, teachers are not enough educated
to teach AI, and second, AI in itself is not a technol-
ogy but an application of technology. Our opinion is
that schools should rather educate kids in the field of
basic science insights and not hot topics, which occur
and vanish over the course of time (just remember: AI
has been a big thing in the 1970s).
Instead of marveling about the ”next big things”,
students should understand timeless, fundamental
ideas (Schwill, 1993) of computer science (or in-
formatics, which in the German version is the most
used term in Germany). To allow education of the
fundamentals of computer science, an agreement has
to be found, what these fundamentals are. In Ger-
many, the politicians and Universities who educate
computer science school teachers have a while ago
agreed to a certain form of curriculum, which we
call the Rahmenplan. Herein, it is fixed that shall
be taught when and how. As modern technology de-
velops over time, the University of Rostock and the
country Mecklenburg-Western Pomerania have just
a
https://orcid.org/0000-0003-3949-1022
b
https://orcid.org/0000-0002-9411-920X
recently agreed to make a modern form of this cur-
riculum (Rahmenplan), which is putting the finger on
the set of fundamental concepts, which very likely
will be the main corpus of computer science in the
next twenty years. Thus, we think it is currently more
important in our perspective, that school kids under-
stand what an algorithm is, instead of learning about
AI (which in the core is also algorithms). Moreover,
after so many years of computer science school ed-
ucation (we had this for over 30 years), we are sure
that is useful to unlock from current tools. Thus,
one insight resulting from this approach is that com-
puter science education works best when the underly-
ing concepts can potentially also be understood with-
out any tools! This is called the unplugged approach
(Gallenbacher, 2017).
However, even the unplugged approach does not
come without didactic or instructional design. Thus,
we looked closer at the different ways to offer ma-
terial to school kids on the best interactive level.
Here we find the traditional educational idea of dis-
tinguishing between enactive-haptic, iconic and sym-
bolic (Bruner, 1970).
The use of enactive representations could be an
appropriate way to get a deep understanding of ab-
stract ideas. The use of enactivities in computer sci-
ence has already been taken up by Bell (T. Bell, 2005)
– for example Treasure Island or The Orange Game
(T. Bell, 2005) – and Gallenbacher (Gallenbacher,
2017) – for example Binary Magic. Gallenbacher also
hosted an exhibition on enactivities in computer sci-
Göbel, L., Hellmig, L. and Martens, A.
An Analysis of Teaching Informatics by Means of Enactive-Haptic Representations.
DOI: 10.5220/0011765200003470
In Proceedings of the 15th International Conference on Computer Supported Education (CSEDU 2023) - Volume 2, pages 207-212
ISBN: 978-989-758-641-5; ISSN: 2184-5026
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
207

ence. (Hugh, 2010) At the University of Rostock, a
pilot project was developed in which student teach-
ers ”present computer science in an exciting way”
(L. G
¨
obel, 2019b) by using enactive-haptic represen-
tations.
However, investigating how teachers work in
school and prepare their material, we were surprised
to learn that the enactive-haptic approach is seldom
used. The same was also observed some years ago by
other researchers. In 2011 Kalbitz et al. published a
paper about the use of the (Enactive-Iconic-Symbolic)
EIS principle in computer science lessons by Berlin
teachers. The data from 40 surveys showed a lack of
using enactive representations, although the EIS prin-
ciple was known by the teachers. Enactive methods
were used less by the respondents than iconic meth-
ods. One reason was, that the teachers hardly knew of
any alternatives (M. Kalbitz, 2011).
In the beginning, a literature study was conducted
to determine the current state of research on enactive-
haptic representations. After that, we came up with
different categories or model of enactivity, which are
described in this paper. We tried to make an order
between the categories and the existing approaches,
which was successful and will be described in the fol-
lowing.
2 THE ROOTS OF
ENACTIVE-HAPTIC
REPRESENTATION
First of all, it has to be clarified what enactive-haptic
representation really is. As a second step, a survey
will be conducted in which the focus will be on the
use of enactive-haptic representations.
The concept of enactive-haptic representations in
the classroom is based on the psychology of learn-
ing. Three main steps that over time led to the idea of
enactive-haptic learning, are briefly outlined.
The first well-known approach can be traced back
to Piaget described an approach to the cognitive de-
velopment of children through the theory of genetic
epistemology (genetic in this context means a kind
of development, in this case, the cognitive develop-
ment, but also the general epistemic development in
human beings). Depending on the age of the child,
four phases are distinguished – sensorimotor phase,
preoperational phase, concrete-operational phase and
formal-operational phase. ”Piaget was convinced that
children ”construct” their schemata through their in-
teraction with the environment”, said Mietzel (Miet-
zel, 1998). Thus, Piaget was one of the first who fo-
cuses on interaction with material as a means of learn-
ing, which directly leads to the creation of cognitive
relations (admittedly, the concept of cognition stems
from a later period, as Piaget’s first works were all
related to behaviorism). As the second in the row,
Aebli paid more attention to the process of educa-
tion and teaching and abstracts from the age-specific
model. He described three main stages: the concrete,
the pictorial and the symbolic stage. In the concrete
stage, work is done with concrete objects and mate-
rials. In the next stage – the pictorial stage – objects
represented pictorially are operated with. In the sym-
bolic stage, objects and operations are represented by
signs. The stage transitions are realized by reflecting
on one’s own activity, verbalizing the action, or by
practice (Aebli, 1985).
This step-wise approach by Aebli was taken to
a new level by Bruner, here the third one in our
short history of ”enaction”. With his enactive-iconic-
symbolic-principle (EIS), Bruner describes the differ-
ent ways of representing knowledge and skills. A
distinction is made between the enactive, iconic and
symbolic levels of representation. The modes of rep-
resentation refer to each other reciprocally and exist
on the same level (Bruner, 1970).
And now, the relation becomes clear: enactive
means in this sketched tradition that learning is best
taking place by using the human senses to interact
with the learning material. Enactive-haptic thus fo-
cuses on the usage of the sense haptic in the context
of learning, which mainly means: touching and inter-
acting with the material.
Coming to this point, we had to ask ourselves, how
this can be realized in Computer Science education?
This question has been answered by several other re-
searchers before, mainly in realizing approaches like
the unplugged model or other comparable ”hands-on”
material. But still, the concept is somewhat hard to
mediate to teachers-to-be. What confused them can
be mainly reduced to aspects like what is meant by
haptic in computer science is imitating the teacher’s
enactive, must the kid find it out all by themselves,
how much information must or can be embedded in
the material, what can I do if a kid is stuck?
So, the process of clarifying the concepts of en-
activity and representation requires a more detailed
analysis. What is required is a collection of ways
the school kids (the students) interact with the ma-
terial, which also represents the way a learning gain
is made, and which its core represents the advantage
of the method in relation to other methods. The inter-
action level can contain attributes like imitate, try out,
explore, listen, watch, try out and listen and the like.
Additionally, a spacial level exists: here the distinc-
tion can be made by answering the question whether
the room plays a role or not, and if it plays a role, then
CSEDU 2023 - 15th International Conference on Computer Supported Education
208
how can this be realized? We located two major levels
in the investigated enactive-haptic examples, which
led us to the distinction between the immediate level
and the mediate level. The mediate level can itself be
further separated into two additional levels, which are
the first-order hybrid representation and the second-
order hybrid representation. These will be explicated
in the following.
The immediate level consists of the interaction
level, which are touching, interaction with things, etc.
Learning takes place by doing and the spacial level is
given by the radius a student has for the interaction
types. Entirety, minimally invasive and interpersonal
representations are part of the immediate level.
The mediate level consists mainly of something
we would call virtual. With this, we mean everything
where the student has to internally visualize things
without direct haptic feedback by an artefact. For this
purpose, the student uses his or her auditive and visual
sensory systems but has nothing to touch. The medi-
ate level describes enactivities that are less direct. Re-
garding spatial representation, the objects referred to
are not part of the student’s environment. The com-
puter can be a means of visualization, thus, the repre-
sentation comes in form of a medium. Hybrid repre-
sentations of first-order and second-order are part of
the mediate level. Specifically, the students get visu-
ally in touch with the activity. Every activity from the
immediate level can convert into the mediate level.
Figure 1 shows the different levels with their
meaning.
Figure 1: Representation of enactivity.
3 USING ENACTIVE-HAPTIC
REPRESENTATION IN
COMPUTER SCIENCE
EDUCATION
This research examines the current state of the art of
teaching computer science (or informatics) concepts
by means of enactive-haptic representations.
3.1 Entirety Representation
View two examples ”Treasure Island” by Computer
Science unplugged (T. Bell, 2005) or ”Von-Neumann-
Principle experience” by G
¨
obel, Hellmig (L. G
¨
obel,
2019a).
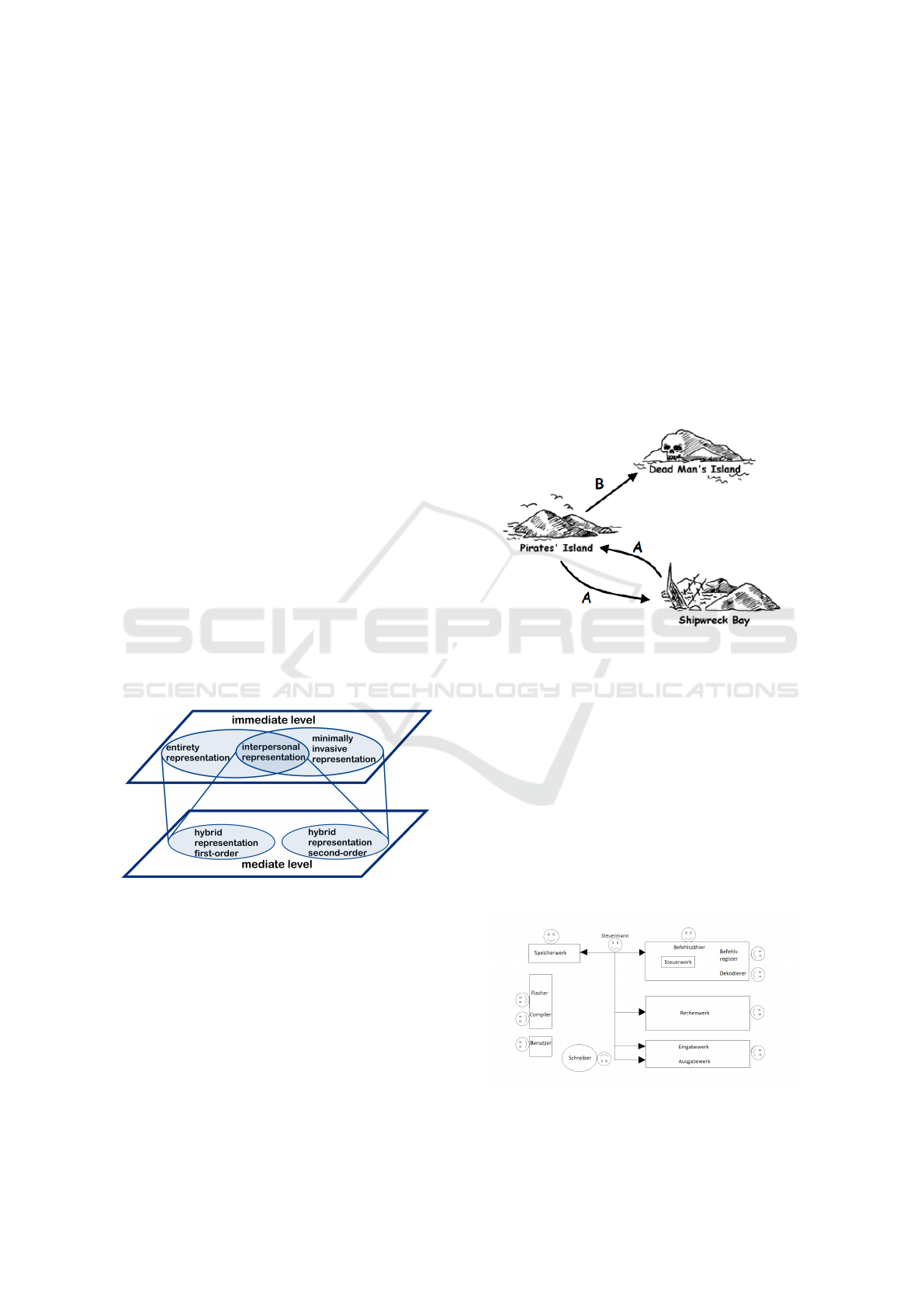
Treasure Island is a ”game” to teach the concept
of a finite state automaton. The classroom is con-
structed in a way that it represents different islands
in an ocean. Pirate ships are sailing from island to is-
land. The pirates take travelers – the students. That
way the students want to sail to Treasure Island. From
each island, only two different pirate ships are sailing.
The students get a map on which they draw the route.
(T. Bell, 2005)
Figure 2: Part of the result map (T. Bell, 2005).
The result of the map shows a finite state automa-
ton with two state transitions. After that activity, the
teacher and students discuss the result and formal-
ize the definition of a finite state automaton (T. Bell,
2005).
The experience of the von-Neumann-Principle is
a ”theatrical performance”. The classroom symbol-
izes von Neumann’s architecture. The students are
elements of this architecture. They run through all
stations. In that way, the students run a program of
von Neumann architecture. They see that all tasks are
processed one by one. So for example they can di-
rectly experience the von Neumann bottleneck. The
teacher moderates this activity (L. G
¨
obel, 2019a).
Figure 3: Classroom of the Von-Neumann-Principal experi-
ence (L. G
¨
obel, 2019a).
An Analysis of Teaching Informatics by Means of Enactive-Haptic Representations
209
After that ”theatrical performance”, the class summa-
rize the concept of the von Neumann principle as a
fundamental idea of computer science.
Both examples have a similarity. This representa-
tion describes the classroom or environment of the
students as a part of the interaction dimension. The
students are also a part of the interaction dimension,
as they play the role of an entity of the ”simulation”.
Mostly the teacher is a moderator or observer. Af-
ter the ”theatrical performance”, the teacher (together
with the students) evaluate the results and explicated
the underlying computer science concept. That enac-
tivity is called entirety representation in our analysis.
It is taught in an immediate way. Things are directly
(haptic) explored and bodily experienced.
3.2 Minimally Invasive Representation
The next examples are the magic trick of binary
system by Gallenbacher (Gallenbacher, 2017) and
text compression by Computer Science unplugged
(T. Bell, 2005).
The magic trick is a paper model sheet of 36 cards
with an ”X” and on the other side, an ”O”. A stu-
dent orders 25 cards of the sheets in a random square.
The last 11 cards are placed in a bigger square by the
teacher or wizard. The teacher or wizard looks away
while the students pull one card around. After that,
the teacher or wizard shows the inverted card. The
audience has to find out why the wizard knows that.
The students have to develop their own theory about
the trick. They have to check how many ”X” and ”O”
are in a row and column. In this way, the students
learn error detection and how many errors can be de-
tected. (Gallenbacher, 2017)
Figure 4: Error detection (Gallenbacher, 2017).
Error detection is included in the checksum algo-
rithm. For example, credit cards have a certain num-
ber. This number includes a checksum algorithm. Af-
ter finishing the test, these aspects are highlighted by
the teacher who resumed the computer science expla-
nation.
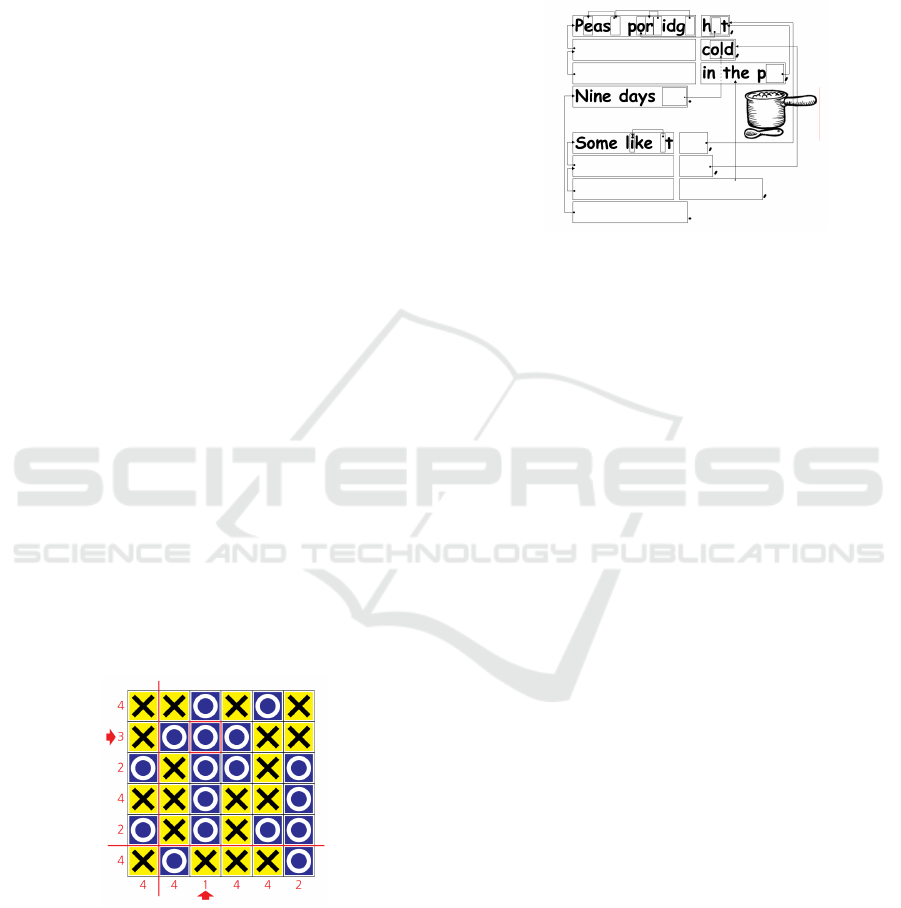
The second example is based on the limit of infor-
mation. An efficient way to save or send information
is compression. The activity starts with a poem. As a
first step, the words can be compressed by putting ar-
rows between identical patterns. In the next step, the
students complete a text by using the pattern. So the
text is compress(T. Bell, 2005).
Figure 5: Text compression (T. Bell, 2005).
The compression of data is an important fact of data
transfer, for example, the pictures in social media are
compressed. Same as above, this is summed up after
the experiment by the teacher and brought together to
mediate the computer science concept.
The similarity of both examples is the way the ma-
terial is used. The students edit the material at their
desks. They can interact with haptic material individ-
ually or in a group. The teacher is a moderator or
observer. This form of representation is called mini-
mally invasive representation. It is teaching in an im-
mediate way. The main difference to the first example
is that the students are not part of a ”simulation”, and
the haptic information has no additional bodily expe-
rience level.
3.3 Interpersonal Representation
Examples of interpersonal representation are the net-
work by Helfrich (Helfrich, 2017) and the Orange
Game by Computer Science unplugged (T. Bell,
2005).
The network by Helfrich uses pegs and flashcards.
The students act as different routers which want to
communicate with each other. So they write a flash-
card with sender, addressee and a message. The flash-
card is fixed with a peg on a thread. The network
grows after every iteration. So the students learn the
basic idea of communication between routers. (Hel-
frich, 2017)
This enactivity version shows different topologies
of networks and how they route information. Real
networks are built according to a certain topology, de-
pending on their task. This information is provided
again by the teacher after summing up the results.
Usually, information about what a router is is given
CSEDU 2023 - 15th International Conference on Computer Supported Education
210

Figure 6: Network design with peg and flashcard (Helfrich,
2017).
in a lesson before the enactive work.
The Orange Game mediates routing and deadlock
in networks. A group of students sits in a circle. Each
student has a number. There are two oranges (indeed
the fruits are meant. Balls might do the same.) with
the same number for each student. The oranges ran-
domly distribute to the hands of the students. One
student has only one orange. The students pass the
oranges to their immediate neighbours till every stu-
dent has their member oranges. (T. Bell, 2005)
The students learn that they have to work together
and not be ”greedy”. (T. Bell, 2005) The fundamental
Figure 7: The Orange Game (T. Bell, 2005).
idea of that game is the deadlock. The deadlock is
part of processes.
These examples focus on the haptic exchange of
things between students. The environment of the stu-
dents does not matter, thus it is a combination of en-
tirety representation and minimally invasive represen-
tation. The students are a part of the activity. But
the activity does not fill the complete room. The stu-
dents can get allotted materials. This representation is
called interpersonal representation.
3.4 Hybrid Representation First-Order
The next example is the treasure hunt by RWTH
Aachen University. A website includes a simulation
to find a treasure. The necessary material is hidden
in different towns which are positions in the class-
room. The students solve encodings. In that way,
they learn how different coding systems work. The
simulation at the computer supports the treasure hunt.
(N. Bergner, 2020) The treasure hunt shows different
Figure 8: Treasure hunt (N. Bergner, 2020).
symmetric encodings. Encoding is an important pro-
cedure to keep messages secret. The students learn
how secure that procedure is.
That enactivity has a different level than the for-
mer examples. The computer is included in that ac-
tivity. So, the level is switched. It is on a mediate
level. Because of the shift of the haptic, it is a hy-
brid representation of the first-order. The first-order
hybrid representation is a combination of the use of a
computer and haptic material.
3.5 Hybrid Representation
Second-Order
The last example is the movie ”Technology on the In-
ternet” by dandelion. The clip shows a haptic option
of run-length encoding. There are little men who call
the numbers ”zero” or ”one” dependent on the encod-
ing. So the clip shows how a picture will send from a
scanner through the internet. (ref, 2022)
The idea of that film shows an option of a com-
press to transfer data.
The film shows a haptic representation. This hap-
tic is produced in the mind of the audience. They
can imitate that encoding. That representation is at
a mediate level. It is a combination between a video
recording and an immediate level activity. So it is
called hybrid representation second-order.
4 OUTLOOK
The term enactive-haptic representation has been the
starting point of the research sketched in this paper.
We have started with the insight, into why enactive-
haptic realizations are so seldomly used in classroom
settings. We came to the point that the overall con-
An Analysis of Teaching Informatics by Means of Enactive-Haptic Representations
211

cept might be too coarse-grained when it comes to
computer science, as the main parts of the subject are
abstract and not easy to grasp in a hands-on scenario.
After the first steps towards the categorizations,
we resulted in different instructional (or didactical)
models of education based on the enactive-haptic per-
spective. In each of the above sketched different ap-
proaches, it becomes quite clear, where interaction
takes place, which role the spacial dimension has,
and which forms of enactivity can be realized. The
yet existing examples for educational scenarios all fit
into the schema, as shown above. Starting from this
point, all the necessary ingredients for developing dif-
ferent types of enactive lectures are available and thus
might potentially be used for instructional design in
computer science. However, what is still missing is
the reality check. Thus, we are currently developing
a questionnaire and potentially interviews with com-
puter science teachers at schools. In contrast to Kalb-
itz et al. (M. Kalbitz, 2011) we will operate more dif-
ferentiated by categorizing the enactivity and a higher
number of cases.
When investigating the form of interaction the fo-
cus of the questionnaire is on the following ques-
tions: ”What is the state now?”, ”If enactive-haptic
representations are used, why and how?” The term
”enactive-haptic” will probably be unknown, so the
query must be made via other questions or methods.
The scope of the teachers’ survey should include a
spectrum of teachers as broad as possible, which al-
lows a cross-sectional and longitudinal approach.
In the following, the methodological procedure
will be worked out. Criteria for determining a se-
lection of subjects must be formulated. First, there
should be a preliminary study, from which a guided
interview can be derived. Second, a survey is to be
conducted in Mecklenburg-Western Pomerania, since
this was the first federal state to introduce the compul-
sory subject of computer science and media education
(R. Schwarz, 2022). It is possible to extend the survey
to other federal states with the help of a questionnaire.
Subsequently, an evaluation can be carried out, which
should lead to the formation of hypotheses. An out-
look for further research can be worked out. Further-
more, the results should show where further training
is needed.
Another next step will be to detect how to educate
teachers and teachers-to-be (i.e. students) in using
enactive-haptic representations and realizations. One
option could be targeted training and vocational train-
ing for teachers, where we have a broad experience in
our lab.
REFERENCES
(2022). Technik im netz. ZDF: L
¨
owenzahn.
Aebli, H. (1985). Zw
¨
olf Grundformen des Lehrens. Klett-
Cotta, Stuttgart, 2nd edition.
Bruner, J. S. (1970). Der Prozess der Erziehung. Berlin
Verlag, Berlin.
C. A. Heinze, J. Haase, H. H. (2010). An action research
report from a multi-year approach to teaching artificial
intelligence at the k-6 level. In First AAAI Symposium
on Educational Advances in Artificial Intelligence.
Gallenbacher, J. (2017). Abenteuer Informatik. IT zum An-
fassen f
¨
ur alle von 9 bis 99 – vom Navi bis Social Me-
dia. Springer, Heidelberg, 4th edition.
Helfrich (2017). Rollenspiel netzwerk.
Hugh, A. (2010). Informatik hautnah erleben. Arbeits-
berichte des Fachbereichs Informatik, Nr. 11.
L. G
¨
obel, L. H. (2019a). Die von-neumann-prinzipien
erleben. ein enaktiver zugang zu einem abstrakten
thema. LOG IN, 39(191/1921):49 – 59.
L. G
¨
obel, L. H. (2019b). Informatik spannend pr
¨
asentieren
- ein einstieg in den studiengang lehramt informatik.
In Informatik f
¨
ur alle, pages 191 – 200. Gesellschaft
f
¨
ur Informatik e. V.
M. Kalbitz, H. Voss, C. S. (2011). Informatik begreifen - zur
nutzung von veranschaulichungen im informatikun-
terricht. In Informatik in Bildung und Beruf, pages
137 – 146. Gesellschaft f
¨
ur Informatik e. V.
Mietzel, G. (1998). P
¨
adagogische Psychologie des Ler-
nens und Lehrens. Hogrefe, G
¨
ottingen, Bern, Toronto,
Seattle.
N. Bergner, K. Kamphausen, D. K. (2020). Schatzsuche.
InfoSphere - Sch
¨
ulerlabor Informatik RWTH Aachen
University.
R. Schwarz, L. Hellmig, S. F. (2022). Informatik-monitor.
Gesellschaft f
¨
ur Informatik e. V.
Schwill, A. (1993). Fundamentale ideen der informatik. In
Zentralblatt f
¨
ur Didaktik der Mathematik.
T. Bell, H. Ian, M. F. (2005). Cs unplugged. In An en-
richment and extension programme for primary-aged
students.
CSEDU 2023 - 15th International Conference on Computer Supported Education
212
