
Coupled Assignment Strategy of Agents in Many Targets Environment
Azizkhon Afzalov
a
, Ahmad Lotfi
b
and Jun He
c
Department of Computer Science, Nottingham Trent University, Clifton Campus, Nottingham, NG11 8NS, U.K.
Keywords:
Path Finding, Multi-Agent, Moving Multiple Targets, Assignment Strategy, Heuristic Search Algorithm.
Abstract:
There are multi-agent algorithms that provide solutions with the shortest path without considering other pur-
suing agents. However, less attention has been paid to computing an assignment strategy for the pursuers that
assign targets before the move action. Besides, the pathfinding problem for multiple agents becomes even
more challenging if the goal destinations change over time. The path-planning problem for multiple pursuing
agents requires more efficient assignment strategy algorithms. Therefore, this study considers existing and the
most recent solutions and conducts experiments in a dynamic environment where multiple pursuing agents are
outnumbered and required to capture the moving targets for a successful outcome. The existing cost function
strategies, such as sum-of-costs and makes, are compared and analysed to the recent twin cost, cover cost
and weighted cost assignment strategies. The results indicate that the recent criterion, the cover cost algo-
rithm, shows the optimal outcomes in terms of pathfinding cost and runtime. Statistical analyses have also
demonstrated the significance of the findings.
1 INTRODUCTION
Finding a path and navigating the pursuing agent from
its starting position to a target position while avoid-
ing obstacles is an important problem in Artificial In-
telligence (AI) (Standley and Korf, 2011; Vermette,
2011). In the presence of a single pursuer in the
environment, the A* algorithm (Hart et al., 1968)
can be an effective solution. The environment be-
comes dynamic with multiple pursuing agents while
each pursuer is given a target position to reach, as-
suming it is static. However, relaxing the assump-
tion and repositioning the targets’ positions make the
multi-agent pathfinding problem more complicated
(
¨
Unde
˘
ger, 2007). While the problem is becoming
increasingly important, issues with coordination, tar-
get assignment, communication, obstacle or collision
avoidance, outsmarting targets while reaching with
fewer time steps and moving quicker in a limited time
need to be considered (Standley, 2010; Wagner and
Choset, 2015). Therefore, it is necessary to find a so-
lution for multiple pursuing agents that successfully
catch moving targets.
In recent years, attention has increased to
pathfinding problems in multi-agent systems, mainly
a
https://orcid.org/0000-0002-1456-542X
b
https://orcid.org/0000-0002-5139-6565
c
https://orcid.org/0000-0002-5616-4691
due to the expansion in computer video games (Lu-
cas, 2008; Johnson and Wiles, 2001; Yannakakis and
Togelius, 2015), robotics (Russell and Norvig, 2021;
Kloder and Hutchinson, 2006; Berg et al., 2009), and
warehouse management (Li et al., 2020; Ma et al.,
2016). In pursuing games, such as cop and robber,
prey and hunter, and military simulated applications,
both side players can move and change their posi-
tions, and this makes it difficult to search and plan
paths and navigate towards the targets while avoiding
obstacles. The challenge increases when the targets
are not stationary and their number increments. The
moving targets can evade capture while time permits
if the pursuers do not have a winning strategy (Mold-
enhauer and Sturtevant, 2009). Well-defined assign-
ment strategies aim to help efficient planning, reduce
computation time, increase the success of the task,
and affect the total performance of catching all mov-
ing targets. Thus, an assignment strategy is important,
and a good assignment strategy is essential for the de-
sired outcome.
Multiple pursuers can benefit from two stages,
which are coupled and decoupled pathfinding algo-
rithms. The coupled approach focuses on planning
and distributing tasks to all pursuers as a single task,
whereas the decoupled approach concentrates on find-
ing a path individually. The assignment strategy al-
gorithm computes all possible combinations (pursuer-
372
Afzalov, A., Lotfi, A. and He, J.
Coupled Assignment Strategy of Agents in Many Targets Environment.
DOI: 10.5220/0011787100003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 372-379
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 1: First, coupled approach assigns pursuers to the
targets and then in decoupled approach the pursuers chase
their targets.
to-target route) for all pursuers in the coupled stage.
This coupled approach produces optimal solutions
(Chouhan and Niyogi, 2017), however, the computa-
tion increases exponentially with the number of pur-
suers. Once the targets are assigned, in the decoupled
stage, all pursuers search their path independently and
navigate towards the moving targets using the heuris-
tic search algorithm. The decoupled approach is fast
but occasionally fails in finding a complete solution
because of conflicts that can arise afterwards, where
pursuers let other pursuers pass (Sharon et al., 2011;
Standley and Korf, 2011; Ryan, 2006). Moreover, its
usage is practical and robust, if one pursuer fails, that
does not affect the entire team’s success (Tovey et al.,
2005). Figure 1 illustrates both approaches.
In this paper, the existing assignment strategies,
such as sum-of-costs and makespan criteria (Atzmon
et al., 2020) and twin-cost, cover-cost and weighted-
cost criteria (Afzalov et al., 2021a), are evaluated to
find the optimal criterion in a new multiple Pursuing
Agents and multiple Moving Targets (PAMT) prob-
lem set. A preliminary version of this study was pub-
lished in a conference paper (Afzalov et al., 2021a).
However, the previous study was limited in experi-
mentation, it did not compare all five criteria together,
nor the runtime and only covered a condition where
agents ≥ targets. The heuristic function is Manhattan
distance in contrast to the previous diagonal moves.
Therefore, in this study, the main contribution is to
evaluate the existing methods through the conduct
of experiments that extend the work significantly, by
providing:
• A description of the assignment strategy criteria.
• A comprehensive set of experiments to evaluate
pathfinding cost, computation time to assign tar-
gets as well as a runtime for pursuing agents.
• A variety of pursuer-to-target combinations,
where targets outnumber pursuers and increased
in each test run (pursuers < targets).
• Benchmark environments from the Baldur’s Gate
video game.
• Statistical analysis using Friedman test.
In the remaining parts of this paper, related work
is discussed in Section 2. Section 4 explains existing
and recent assignment strategy algorithms. Section 5
evaluates the algorithms empirically and provides the
results of statistical tests. Section 6 concludes with
areas that are left for future work.
2 RELATED WORK
Moving Target Search (MTS) (Ishida and Korf, 1991)
is a problem of a single agent chasing a single mov-
ing target with full knowledge of the environment
and position of the target. This problem has been
extended to multiple agents and targets (MAT) (Xie
et al., 2017) where pursuing agents such as police ve-
hicles chase suspects. This method computes a se-
ries of autonomous agent-to-target searches with a
given assignment strategy. An effective solution to
this problem is challenging, computationally expen-
sive and known to be NP-hard (Li et al., 2020; Shi
et al., 2021; Fomin et al., 2008).
There are many formulations of this problem, and
Multirobot Path Planning on graphs (MPP) (Yu and
LaValle, 2016) is one of them, where robots move
from one vertex to an adjacent vertex at a one-time
step. To avoid a collision of robots’ moves, the MPP
allows synchronous rotation for all robots in contrast
to only a single robot move, and the global objec-
tive is to reduce time in the completion of tasks. A
similar problem is Multi-Agent PathFinding (MAPF)
(Sharon et al., 2011) which deals with multiple static
destinations or Multi-Agent Meeting (MAM) (Atz-
mon et al., 2020), which gathers multiple agents at
the chosen meeting point among all possible destina-
tions.
Finding an optimal algorithm for a given envi-
ronment is a difficult task while finding an opti-
mal algorithm for all environments is impossible in
principle (Maple et al., 2014). For instance, the
Multi-Directional Meet in the Middle (MM*) (Atz-
mon et al., 2020) algorithm promises an optimal path
for MAM problems with a unique priority function
for Sum-Of-Costs (SOC) and the maximum distance
cost (makespan). The distance towards the meeting
position is minimised using these two different costs,
firstly SOC and secondly makespan. The algorithm
uses the best-first search method when finding the
middle meeting point for several starting locations.
Several agents can be tasked to find a collision-
free path to the static goal positions in multi-agent
pickup and delivery problems. Agents are allowed to
move from starting position to the pickup location,
Coupled Assignment Strategy of Agents in Many Targets Environment
373

wait and then continue to the final location. A task
to pick up from a location and deliver to a goal des-
tination is a specific multi-goal MAPF problem that
is referred to as a Multi-Agent Pickup and Delivery
(MAPD) (Ma et al., 2017) problem. This process re-
quires multiple paths and involves planning for mul-
tiple agents. The Multi-Label A* (MLA*) (Grenouil-
leau et al., 2019) algorithm is able to provide a so-
lution by computing multiple paths by using the A*
algorithm.
Conflict Based Search (CBS) (Sharon et al.,
2012b) is the algorithm for MAPF problems that
promises optimal solutions at the expense of com-
putation by using a coupled approach, however, all
pathfinding searches are single-agent which is simi-
lar to the decoupled approach (Sharon et al., 2013).
CBS uses both high-level and low-level searches. At
the high level, the search is structured to use the best-
first search, and the arising conflicts need to be re-
solved for pairs of agents. The CBS algorithm uses
a Constraint Tree (CT), with each node having con-
straints on time and location. At the low level, the A*
based search is run only for the single agent, while
disregarding the other agents, to find the optimal path
under a set of constraints that are established at the
high-level search.
CBS solves MAPF problems optimally, however,
the worst-case performance needs to be reduced and
therefore, CBS has been generalised into a new al-
gorithm called Meta-Agent CBS (MA-CBS) (Sharon
et al., 2012a). This approach has been generalised to
merge the conflicting agents into one compound as
a meta-agent if the predefined conflict bound is met,
which then is processed to find a path at the lower
level.
The combined Target-Assignment and Path-
Finding (TAPF) (Ma and Koenig, 2016) problem is
a different kind of MAPF problem. The number of
agents is equal to the number of targets, and the agents
are aimed first to assign all targets and then plan their
path with no collision by minimising the makespan in
the known environments. The agents are split into
teams and each team is given the same number of
targets to match the number of agents in the team.
It is allowed for each agent within its team to swap
the assigned targets but the agents from the differ-
ent teams are not allowed to swap the targets with
other teams. The solution for this problem is ad-
dressed with a Conflict-Based Min-Cost-Flow (CBM)
(Ma and Koenig, 2016) algorithm that solves TAPF
instances using anonymous (swappable target assign-
ments) and non-anonymous (pre-determined target
assignments) multi-agent pathfinding algorithms.
3 PROBLEM DEFINITION
In the PAMT problem, an undirected and unweighted
graph G = (V,E) is given with a set of n pursuing
agents P = {p
1
,p
2
,...,p
n
}. Each pursuer p
i
∈ P starts
at a vertex s
i
∈ V and navigates to the target vertex t
i
∈ V. Time is discretised into time steps and each pur-
suer p
i
can occupy exactly one vertex. At each time
step, the pursuer can either move to an adjacent avail-
able vertex or wait in its current vertex, where each
action is assigned with a cost of one. The goal of the
PAMT problem is to find a sequence of actions (move
or wait) for each pursuer p
i
with a set of path routes R
= {r
1
,r
2
,...,r
n
} where r
i
is a path route for the pursuer
p
i
from s
i
to t
i
. The solution results in moving all pur-
suers from their start vertices to the targets with the
optimal pathfinding cost, which is the minimum cost
of the last caught target.
4 FINDING OPTIMAL
ASSIGNMENT STRATEGIES
In the coupled stage, the pursuers coordinate using the
assignment strategy criterion to assign existing targets
in a defined scenario. The given assignment strategy
then provides the optimum combination to enable the
pursuers to achieve their goal of catching targets the
most cost-effectively. The research has been taken
to find an optimal combination of assignments and
common cost functions that have been used are the
summation of distances or the maximum time step
(makespan). This section introduces existing assign-
ment strategy criteria that are used in assigning targets
to the pursuing agents and the following provides a
brief description of each algorithm.
4.1 Sum-of-Cost
The total cost of all distances is used in this criterion
(Atzmon et al., 2020). The distance is computed from
the current position of pursuers and not the future
positions. In Figure 2, a two-dimensional map with
black-shaded obstacles, there are two pursuing agents
(P
1
, P
2
) and two targets (T
1
, T
2
). Each pursuing agent
has an admissible path towards the targets; therefore,
they have got a choice of which one of two targets
to follow. The SOC criterion chooses a combination
with the lowest distance in total. Table 1 displays the
distance cost for each pursuer towards the target. The
column SOC is the sum of two costs within the same
combination. Combination 1 is chosen as its total is
lower than that of combination 2. The cost
s
equation
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
374
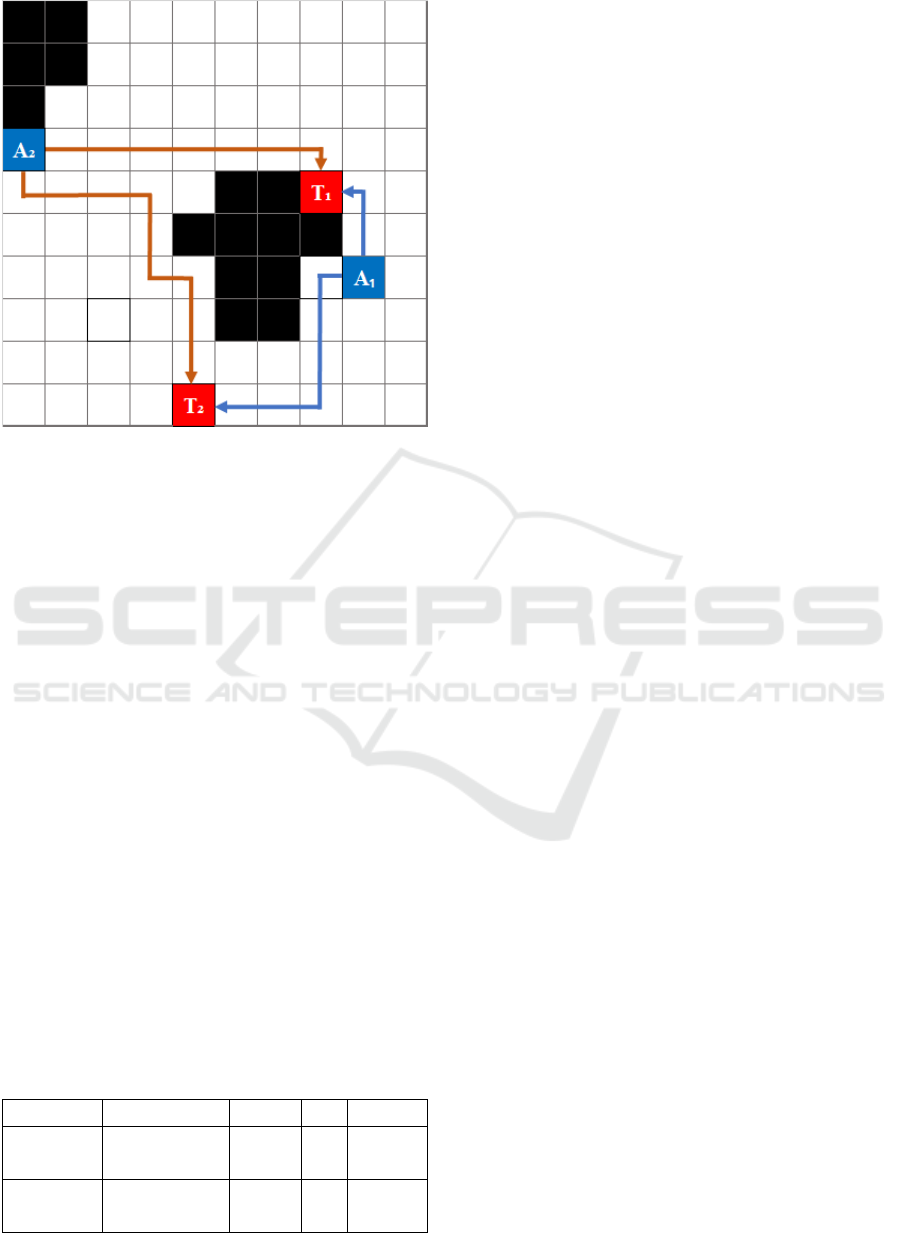
Figure 2: Demonstrating pursuers’ (P
1
and P
2
) possible di-
rections towards the targets (T
1
and T
2
) on a sample map.
Black shades are obstacles.
for SOC is:
cost
s
= (P
i
→ T
i
)
distance
+ (P
k
→ T
k
)
distance
(1)
4.2 Makespan
Makespan criterion uses the maximum distance cost
within the combination instead of its total (Xie et al.,
2017). Makespan has been named timesteps too, as
each move is equal to a single time step. Therefore, it
focuses on the maximum time spent to reach the cur-
rent position of the targets for all pursuers. This is
important in many situations, for example, hot food
delivery drivers might want to take their customers’
orders to their destinations such that the maximum
time is as low as possible. Table 1 additionally dis-
plays this criterion in the column named makespan.
Combination 2 has the lowest value for the makespan
criterion. The cost
m
equation for makespan is:
cost
m
= max{(P
i
→ T
i
)
distance
, (P
k
→ T
k
)
distance
}
(2)
Table 1: The distance cost combinations for two agents to-
wards two targets as illustrated in Figure 2.
Combination Pursuer to Target Distance SOC makespan
1
P
1
→ T
1
3
13 10
P
2
→ T
2
10
2
P
1
→ T
2
7
15 8
P
2
→ T
1
8
4.3 Twin Cost
The twin cost (Afzalov et al., 2021a) criterion, just
like the previous SOC and makespan criteria, uses
the distance values to determine the best cost for its
new assignment approach. The product of SOC and
makespan in the column of Table 1 is the generated
value for each combination. In the situations, when
there is a tie-breaker needed, then the average of SOC
and makespan is taken. Two values are multiplied to-
gether for the twin cost criterion equation:
cost
t
= SOC × makespan (3)
4.4 Weighted Cost
This weighted cost (Afzalov et al., 2021a) crite-
rion relevant to the problems where both SOC and
makespan costs needed to be considered together.
When all distances are computed and their combi-
nation values are obtained for each pursuer, then the
results in Table 1 for SOC and makespan will allo-
cate a specific weight value according to the given
weighted-cost criterion.
For instance, a delivery driver with a scheduled
plan drives fast to get to the goal destination quickly,
which is the makespan criterion, however, at the same
time, the driver needs to consider shorter routes to get
there, the SOC criterion. If the weight value of 0.2%
is given for SOC and 0.8% for makespan, then with
equation 4 the result for combination 1 is 10.6 and
for combination 2 is 9.4. Therefore, the lowest value,
which is combination 2 is the choice of route plan for
the delivery driver.
cost
w
= (SOC × m)+ (makespan × n) (4)
4.5 Cover Cost
The above-mentioned criteria use a distance to com-
pute the best assignment strategy for the multiple
agents. The cover cost (Afzalov et al., 2021a) cri-
terion proposes a different approach which is not to
use the cost of distances, but instead, while idle be-
fore the action starts, it expands and marks each state
on the map as covered for each pursuer. The expan-
sion is similar to the cells in the breadth-first search
algorithm. These covered states are divided by the
number of empty states and the percentage is the re-
sult for each pursuer. Depending on the number of
pursuers present on the map, the mean is taken for
each combination. In contrast to the previous crite-
ria, not the lowest percentage value, but instead, the
highest percentage value is optimal.
Coupled Assignment Strategy of Agents in Many Targets Environment
375

Figure 3: Grid-based AR0509SR map from Baldur’s Gate
video game with black obstacles and narrow passages.
4.6 Pursuing Algorithm and Target
The pursuing agents use the Strategy Multiple Tar-
get A* (STMTA*) (Afzalov et al., 2021b) algorithm
which runs autonomous paths to the assigned targets.
STMTA* uses an assignment strategy algorithm in
the coupled stage, and once all targets are assigned
to the pursuers while they idle, then in the decoupled
stage, the pursuers move a step towards the targets. If
the target is re-positioned and moved to another state,
then STMTA* search for a new path to the already as-
signed target. If the assigned target is captured by the
pursuer, it can get re-assigned to another non-captured
target. Moreover, it is possible to navigate all pursuers
to the last target as this increases the capture.
It is worth mentioning that the targets use the Sim-
ple Flee (SF) (Isaza et al., 2008) algorithm which is
based on the A* algorithm that evades pursuers and
checks periodically if the path is still the best to es-
cape.
5 EMPIRICAL EVALUATIONS
This section presents the empirical results for the as-
signment strategies which are described in Section 4.
Initially, the setting for the experiments is described
and then follows the presentation of the performance
results. The pathfinding cost, the computation time
in assigning targets to the pursuers and the runtime to
reach the targets, are all measured for performance.
Finally, statistical tests are conducted for the signifi-
cance of the results.
5.1 Experimental Setup
The experiments are adapted to a simulated gaming
environment and set to run on commercial game in-
Figure 4: Pathfinding cost mean for pursuing agents.
dustry maps, which are standardised benchmarked
maps from Baldur’s Gate video game (Stern et al.,
2019). The environments are grid-based 2-D rect-
angular with four-connected states. The selection
of these five maps is based on the size, existence
of obstacles and difficulty of navigation. A sample
AR0509SR map is illustrated in Figure 3. All play-
ers have equal speed and one action is performed at
each time step. However, it is possible to apply var-
ious moving costs and speeds. It can be imagined as
a scenario with cops (pursuing agents) and robbers
(targets), where cops need to unite their forces to suc-
cessfully catch robbers at a minimum cost or similar
to the multi-player computer video game Prey: Ty-
phon Hunter (Arkane Studios, 2018).
The initial scenario is configured with 2 pursuing
agents and 4 moving targets (2vs4). The number of
targets is increased by 2 in each scenario until reaches
10 targets. Similarly, three and four pursuing agents
are compared for their behaviour with similar target
settings. Each problem is defined by the starting po-
sition for pursuers and targets that are randomly dis-
persed at pre-selected locations in the environment.
Each pursuer and target has knowledge of the loca-
tions of others. Time is discretised into time steps and
only orthogonal moves are allowed with a cost of one.
Each assignment strategy algorithm is tested un-
der the same configurations in the same environment.
Each setup was tested 20 times, totalling 30,000 in-
dividual test runs. The base of the implementation
(Isaza et al., 2008) was kindly provided by Alejandro
Isaza and it has been extended such that multiple tar-
gets and various pursuer-target assignment strategies
could be tested. The experiments are conducted on a
Linux machine on Intel® Core™ i7 at 2.2 GHz CPU
with 16 GB of RAM.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
376
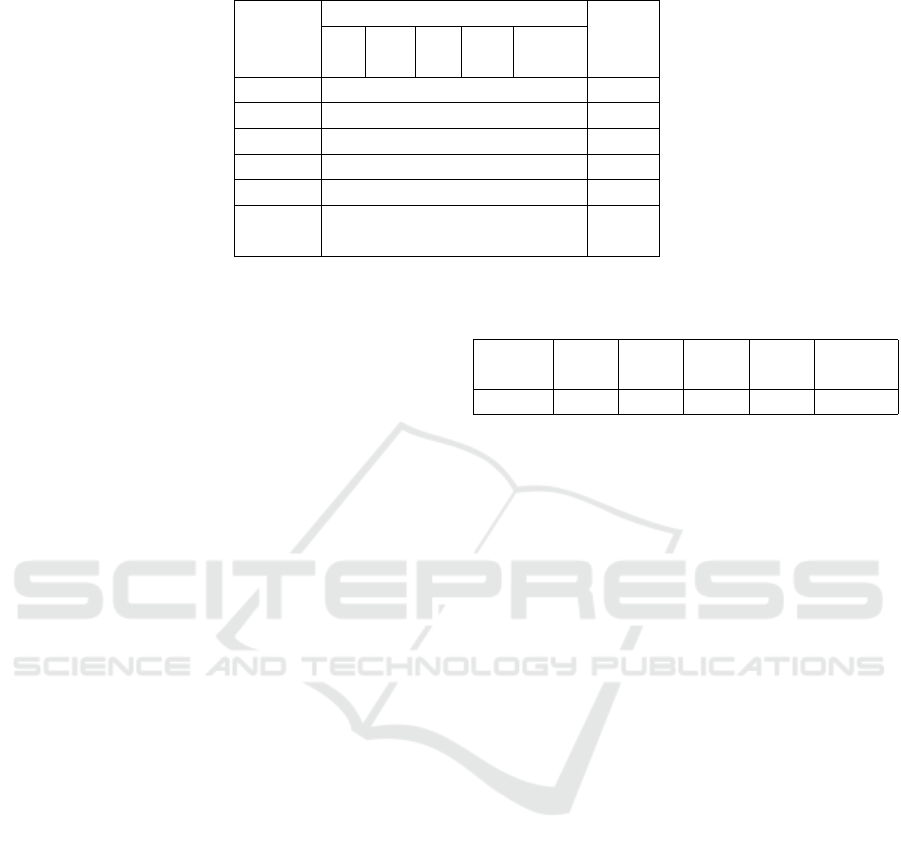
Table 2: Ranking assignment strategies using Friedman statistical analysis test and displaying p-values for significance.
Maps
Ranking Values
p-value
SOC
Make
span
Twin
cost
Cover
cost
Weighted
cost
AR0311SR 2 4 5 1 3 2.25E-03
AR0509SR 4 3 1 2 5 1.25E-02
AR0527SR 1 5 4 2 3 1.34E-06
AR0707SR 3 5 4 1 2 1.06E-07
AR0712SR 4 2 3 5 1 7.59E-01
Total
Ranking
2 3.5 5 1 3.5
5.2 Results
The performance of the assignment strategy algo-
rithms is evaluated, and the results are presented for
the pathfinding cost, the time it takes to assign targets,
and the runtime to reach the targets. Having different-
sized maps, the experiments are not limited to a fixed
deadline, but it is adjusted to the size of the map and
runs out of time (timeout) at 10 times the height of
the map. The pathfinding cost is measured for the
number of time steps taken at capturing all targets for
successful runs or until timeout for unsuccessful runs.
The success is recorded when all targets are captured,
i.e., at least one pursuer occupies the same state as the
target. The runtime is measured in seconds. Mean
is taken for all measurements considering all pursuers
and configurations.
5.2.1 Pathfinding Cost
The pathfinding costs for assignment strategy algo-
rithms are measured and depicted in Figure 4. The
graph shows the mean for the pathfinding cost of five
maps for all pursuer-target combinations. Pre-defined
weight parameters are used for the weighted cost al-
gorithm. For the experiments in this study, the ratio
of 50/50 is used for SOC and makespan.
The results in Figure 4 display that the cover cost
algorithm has the lowest number of steps on average
and while using the maximum coverage in assign-
ing targets produced the best performance. The twin
cost and weighted cost algorithms displayed similar
performance, while SOC performed slightly better.
Makespan has the highest number of steps in catching
all moving targets. These results are averaged across
all maps and configuration settings, however, even if
it is occasionally, it is possible to see the twin cost
displaying better results than others. Obviously, the
pathfinding cost increased with the increase of targets
during the experiments, and this did not affect the suc-
cess of the algorithms, as none of them failed in cap-
Table 3: Runtime in seconds for pursuing agents over all
maps.
SOC
Make-
span
Twin
cost
Cover
cost
Weighted
cost
Average: 9.4448 9.4880 9.3927 9.1737 9.4895
turing the targets, thus the success rate is 100% across
all.
Although the cover cost algorithm produces better
results, statistical tests are conducted on the pathfind-
ing costs to identify significance. The data obtained
from the test runs are not normally distributed and
there are five algorithms to compare, therefore, the
Friedman test (Dem
ˇ
sar, 2006) is used for statistical
analysis. First, the ranking is used in the Fried-
man test where each data set is ranked separately for
each algorithm and the algorithm with the best perfor-
mance is rank no. 1, as shown in Table 2. The ranking
is obtained for all algorithms per map and added up
accordingly. To obtain the overall ranking results, all
ranking values are added to get the total sum and the
final total ranking as displayed at the bottom of Table
2. Second, the Friedman test uses these ranking re-
sults to obtain p-values. The 0.05 is used for the level
of significance and the results are displayed in the
same table under p-value column. The evidence sug-
gests that the results display statistically strong signif-
icant differences and the results on AR0509SR show
little significance. It is possible to conclude that the
cover cost algorithm displays significantly better.
5.2.2 Runtime
The time spent on assignment strategy algorithms to
identify and assign targets to the pursuing agents is
evaluated in seconds. In each test run, the time is
measured until all pursuers are provided with the most
optimal configuration set and assigned all existing tar-
gets on the map. Figure 5 illustrates the results for all
algorithms and their behaviour on the provided map.
Because the starting positions are fixed on every test
Coupled Assignment Strategy of Agents in Many Targets Environment
377

Figure 5: The time to assign targets before pursuers move.
run and the time to assign targets is measured exclud-
ing the navigation time, the average time to assign
targets has a very small difference among all but not
the cover cost. It is always expensive to compute all
non-blocked states and this is the feature of the cover
cost. Therefore, as expected, cover cost displays the
highest computation cost with 2.7% times slower. All
other algorithms display similar results and there is no
global algorithm whose approach displays the quick-
est assignment time.
The runtime measures once pursuers start the ac-
tion and navigate until the capture of all targets. This
action is recorded in seconds and the results are aver-
aged over all tests. It is possible that the pathfinding
cost is related to runtime. The shortest path produces
the quickest solution. Figure 4 shows that cover cost
has the lowest cost; similarly, this can be seen in Ta-
ble 3 for runtime. Despite the fact that the cover cost
takes longer during the assignment, it is faster in cap-
turing all targets.
6 CONCLUSION
In this study, assignment strategy algorithms are in-
vestigated and experimentally compared to analyse
the optimal criterion in assigning multiple targets
to multiple pursuing agents. As discussed in Sec-
tion 2, the existing cumulative cost such as SOC or
makespan is used to assign targets or goal destina-
tions. The new cost function approaches, twin cost,
cover cost and weighted cost, are empirically evalu-
ated with the existing criteria. The cover cost algo-
rithm can navigate the pursuing agents to the moving
targets cost-effectively and is statistically proven to be
significant. At the same time, the cover cost is quicker
but performance in assigning targets to the pursuers is
lower due to the high-cost computation. Alongside
this, the weighted cost with a 50/50 parameter setting
has been the quickest with a very small difference to
assign available targets to the pursuers before the pur-
suers’ navigation towards moving targets starts.
Although the experiments are conducted for mov-
ing targets, it is possible to apply for stationary posi-
tioned targets that are similar to the warehouse exam-
ple. It is expected that the time to assign targets will
be similar, as it computes before any move action.
REFERENCES
Afzalov, A., He, J., Lotfi, A., and Aydin, M. E. (2021a).
Multi-agent path planning approach using assign-
ment strategy variations in pursuit of moving tar-
gets. In Agents and Multi-Agent Systems: Technolo-
gies and Applications 2021, pages 451–463, Singa-
pore. Springer.
Afzalov, A., Lotfi, A., and Aydin, M. E. (2021b). A strategic
search algorithm in multi-agent and multiple target en-
vironment. In RiTA 2020, pages 195–204, Singapore.
Springer.
Arkane Studios (2018). Prey: Typhon hunter. Microsoft
Windows.
Atzmon, D., Li, J., Felner, A., Nachmani, E., Shperberg,
S., Sturtevant, N., and Koenig, S. (2020). Multi-
directional heuristic search. In Proceedings of the
29th International Joint Conference on Artificial In-
telligence, IJCAI, pages 4062–4068.
Berg, J. V. D., Snoeyink, J., Lin, M., and Manocha, D.
(2009). Centralized path planning for multiple robots:
Optimal decoupling into sequential plans. In Trinkle,
J., Matsuoka, Y., and Castellanos, J. A., editors, Pro-
ceedings of Robotics: Science and Systems, volume 5,
page 137 – 144. MIT Press Journals, Seattle, USA.
Chouhan, S. S. and Niyogi, R. (2017). DiMPP: a complete
distributed algorithm for multi-agent path planning.
Journal of Experimental and Theoretical Artificial In-
telligence, 29(6):1129–1148.
Dem
ˇ
sar, J. (2006). Statistical comparisons of classifiers
over multiple data sets. The Journal of Machine learn-
ing research, 7:1–30.
Fomin, F. V., Golovach, P. A., and Kratochv
´
ıl, J. (2008).
On tractability of cops and robbers game. In Ausiello,
G., Karhum
¨
aki, J., Mauri, G., and Ong, C. L., edi-
tors, Fifth IFIP International Conference On Theoret-
ical Computer Science - TCS 2008, volume 273, pages
171–185.
Grenouilleau, F., van Hoeve, W.-J., and Hooker, J. N.
(2019). A multi-label A* algorithm for multi-agent
pathfinding. In ICAPS 2019 - Proceedings of the 29th
International Conference on Automated Planning and
Scheduling, volume 29, pages 181–185.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):100–107.
Isaza, A., Lu, J., Bulitko, V., and Greiner, R. (2008). A
cover-based approach to multi-agent moving target
pursuit. In Proceedings of the 4th Artificial Intelli-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
378

gence and Interactive Digital Entertainment Confer-
ence, AIIDE, page 54 – 59.
Ishida, T. and Korf, R. E. (1991). Moving target search.
In Proceedings of the 12th International Joint Confer-
ence on Artificial Intelligence, IJCAI, volume 1, pages
204–210.
Johnson, D. and Wiles, J. (2001). Computer games with in-
telligence. In Proceedings of the 10th IEEE Interna-
tional Conference on Fuzzy Systems, volume 3, pages
1355–1358.
Kloder, S. and Hutchinson, S. (2006). Path planning for
permutation-invariant multirobot formations. IEEE
Transactions on Robotics, 22:650–665.
Li, J., Gange, G., Harabor, D., Stuckey, P. J., Ma, H.,
and Koenig, S. (2020). New techniques for pairwise
symmetry breaking in multi-agent path finding. In
Proceedings of the 13th International Symposium on
Combinatorial Search, SoCS, volume 30, pages 193–
201.
Lucas, S. M. (2008). Computational intelligence and
games: Challenges and opportunities. International
Journal of Automation and Computing, 5(1):45–57.
Ma, H. and Koenig, S. (2016). Optimal target assignment
and path finding for teams of agents. In Proceedings
of the 15th International Conference on Autonomous
Agents and Multiagent Systems, AAMAS, page 1144 –
1152.
Ma, H., Koenig, S., Ayanian, N., Cohen, L., H
¨
onig, W., Ku-
mar, T. K., Uras, T., Xu, H., Tovey, C., and Sharon,
G. (2016). Overview: Generalizations of multi-agent
path finding to real-world scenarios. In IJCAI-16
Workshop on Multi-Agent Path Finding.
Ma, H., Li, J., Kumar, T. K., and Koenig, S. (2017). Life-
long multi-agent path finding for online pickup and
delivery tasks. In Proceedings of the 16th Interna-
tional Conference on Autonomous Agents and Multia-
gent Systems, AAMAS, volume 2, pages 837–845.
Maple, C., Prakash, E., Huang, W., and Qureshi, A. N.
(2014). Taxonomy of optimisation techniques and ap-
plications. International Journal of Computer Appli-
cations in Technology, 49(3-4):251–262.
Moldenhauer, C. and Sturtevant, N. R. (2009). Optimal
solutions for moving target search. In Proceedings
of the 8th International Conference on Autonomous
Agents and Multiagent Systems, AAMAS, volume 2,
pages 1249–1250.
Russell, S. and Norvig, P. (2021). Artificial intelligence: A
modern approach (Global edition). Pearson Educa-
tion Limited, 4 edition.
Ryan, M. (2006). Multi-robot path-planning with sub-
graphs. In Proceedings of the 19th Australasian Con-
ference on Robotics and Automation, ACRA, pages 1–
8.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. (2012a).
Meta-agent conflict-based search for optimal multi-
agent path finding. In Proceedings of the 5th Inter-
national Symposium on Combinatorial Search, SoCS,
page 97 – 104.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2012b). Conflict-based search for optimal multi-
agent path finding. In Proceedings of the 26th Na-
tional Conference on Artificial Intelligence, AAAI,
volume 1, page 563 – 569, Ontario, Canada. AAAI
Press.
Sharon, G., Stern, R., Goldenberg, M., and Felner, A.
(2011). The increasing cost tree search for optimal
multi-agent pathfinding. In Proceedings of the 22nd
International Joint Conference on Artificial Intelli-
gence, IJCAI, page 662 – 667.
Sharon, G., Stern, R., Goldenberg, M., and Felner, A.
(2013). The increasing cost tree search for opti-
mal multi-agent pathfinding. Artificial Intelligence,
195:470 – 495.
Shi, Y., Hu, B., and Huang, R. (2021). Task allocation
and path planning of many robots with motion uncer-
tainty in a warehouse environment. In 2021 IEEE In-
ternational Conference on Real-Time Computing and
Robotics, RCAR, page 776 – 781.
Standley, T. (2010). Finding optimal solutions to coopera-
tive pathfinding problems. In Proceedings of the 24th
National Conference on Artificial Intelligence, AAAI,
volume 1, page 173 – 178.
Standley, T. S. and Korf, R. E. (2011). Complete algorithms
for cooperative pathfinding problems. In Proceedings
of the 22nd International Joint Conference on Artifi-
cial Intelligence, IJCAI, page 668 – 673.
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. K. S., Boyarski, E., and Bart
´
ak, R. (2019). Multi-
agent pathfinding: Definitions, variants, and bench-
marks. In Proceedings of the 12th International Sym-
posium on Combinatorial Search, SoCS, page 151 –
158.
Tovey, C., Lagoudakis, M. G., Jain, S., and Koenig, S.
(2005). The generation of bidding rules for auction-
based robot coordination. In Multi-Robot Systems.
From Swarms to Intelligent Automata - Proceedings
from the 2005 International Workshop on Multi-Robot
Systems, volume 3, page 3 – 14.
¨
Unde
˘
ger, C¸ . (2007). Single and multi agent real-time path
search in dynamic and partially observable environ-
ments. PhD thesis, Middle East Technical University,
C¸ ankaya, Ankara, Turkey.
Vermette, J. (2011). A survey of path-finding algorithms
employing automatic hierarchical abstraction. Jour-
nal of the Association for Computing Machinery,
377:383.
Wagner, G. and Choset, H. (2015). Subdimensional expan-
sion for multirobot path planning. Artificial Intelli-
gence, 219:1–24.
Xie, F., Botea, A., and Kishimoto, A. (2017). A scalable ap-
proach to chasing multiple moving targets with mul-
tiple agents. In Proceedings of the 26th International
Joint Conference on Artificial Intelligence, IJCAI, vol-
ume 0, page 4470 – 4476.
Yannakakis, G. N. and Togelius, J. (2015). A panorama
of artificial and computational intelligence in games.
IEEE Transactions on Computational Intelligence and
AI in Games, 7:317–335.
Yu, J. and LaValle, S. M. (2016). Optimal multirobot
path planning on graphs: Complete algorithms and
effective heuristics. IEEE Transactions on Robotics,
32(5):1163–1177.
Coupled Assignment Strategy of Agents in Many Targets Environment
379
