
A Comparison of Synchronous and Asynchronous Distributed Particle
Swarm Optimization for Edge Computing
Riccardo Busetti, Nabil El Ioini, Hamid R. Barzegar and Claus Pahl
Free University of Bozen-Bolzano, Bolzano, Italy
Keywords:
Edge Cloud, Optimization, Particle Swarm Optimization, Distributed PSO, Synchronous PSO, Apache Spark,
Kubernetes, Docker.
Abstract:
Edge computing needs to deal with concerns such as load balancing, resource provisioning, and workload
placement as optimization problems. Particle Swarm Optimization (PSO) is a nature-inspired stochastic opti-
mization approach that aims at iteratively improving a solution of a problem over a given objective. Utilising
PSO in a distributed edge setting would allow the transfer of resource-intensive computational tasks from a
central cloud to the edge, this providing a more efficient use of existing resources. However, there are chal-
lenges to meet performance and fault tolerance targets caused by the resource-constrained edge environment
with a higher probability of faults. We introduce here distributed synchronous and asynchronous variants of
the PSO algorithm. These two forms specifically target the performance and fault tolerance requirements in
an edge network. The PSO algorithms distribute the load across multiple nodes in order to effectively realize
coarse-grained parallelism, resulting in a significant performance increase.
1 INTRODUCTION
Edge computing aims at reducing the overload on
cloud resources by distributing compute and storage
resources nearer to the edge and its devices (Hoang
et al., 2019). This proximity to data sources also
decreases latency (Mahmud et al., 2020). Unlike
cloud data centers, edge devices are geographically
distributed, resource-constrained, often even highly
dynamic in their environment. This in turn creates
problems (Bonomi et al., 2012) that require tailored
solutions to address load balancing, workload place-
ment or resource provisioning (Salaht et al., 2020).
Various optimization problems have emerged for
the edge (Scolati et al., 2019; Pahl, 2022) that
require intelligent solutions. Here, specifically
meta-heuristics nature-inspired methods like Particle
Swarm Optimization (PSO) provide suitable solutions
(Rodriguez et al., 2021). Nonetheless, most existing
PSO-based solutions are designed to be run on sin-
gle machines, which is often not adequate for edge
devices’ limited resources and reliability. Thus, in or-
der to improve performance but also fault-tolerance
of a PSO solution for the edge, we need to horizon-
tally scale the computation to combine resources of
multiple nodes into one transparent distributed edge
architecture.
Due to the lack of computational resources, but
also a higher probability of faults in edge architec-
tures, we need a PSO variant that combines compu-
tational power of multiple edge nodes while also of-
fering resilience to deal with nodes failures. A char-
acteristic of the PSO algorithm is its distributed na-
ture since the algorithm is essentially a swarm-based
evolutionary algorithm (Wang et al., 2018), allow-
ing for coarse-grained parallel implementation in a
parallel or distributed computational network. The
PSO algorithm has two primary variants that differ
in the update sequence of the particles’ velocities and
positions. These variants are the Synchronous PSO
and Asynchronous PSO. These variants can be im-
plemented in both a centralized or distributed man-
ner. While some distributed PSO variants have been
proposed, our objective is here a comparison of dis-
tributed synchronous and asynchronous PSO algo-
rithms as two variants that aim to enhance perfor-
mance and fault tolerance. We also highlight their
suitability for different application settings.
194
Busetti, R., El Ioini, N., Barzegar, H. and Pahl, C.
A Comparison of Synchronous and Asynchronous Distributed Particle Swarm Optimization for Edge Computing.
DOI: 10.5220/0011815500003488
In Proceedings of the 13th International Conference on Cloud Computing and Services Science (CLOSER 2023), pages 194-203
ISBN: 978-989-758-650-7; ISSN: 2184-5042
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 PARTICLE SWARM
OPTIMIZATION
Particle Swarm Optimization (PSO) is a nature-
inspired stochastic optimization algorithm (Kennedy
and Eberhart, 1995). The PSO algorithm centres
around a population of entities composed of so-called
particles. A particle is an abstraction of an entity that
moves with a given velocity and acceleration. Each
particle in a swarm keeps track of both its best per-
sonal position and best global position. The latter po-
sition represents the best position found by any parti-
cle in the swarm. The concept of the “best” position
can be measured with a fitness function, which we
aim to optimize. The term “best” refers here to the
minimum or maximum value found during an evalua-
tion of the particle’s position with the defined fitness
function. PSO works in iterations, during which all
particles are evaluated based on their fitness function
in terms of best personal and global positions.
Our first variant, the synchronous PSO, is the most
common variant and uses the concept of iterations.
Each iteration is composed of four steps: evaluate the
fitness function with each particle’s position as input,
the evaluation of the best personal position for every
particle, the determination of the best global position
among all particles, and updating each particle’s ve-
locity and position based on the best positions com-
puted earlier.
Our second variant, the asynchronous PSO, is dif-
ferent ii that in the asynchronous variant particles are
updated based on the current state of all the swarm,
i.e., each particle’s velocity and position is updated as
soon as the fitness function is evaluated (that means it
is considering the best global position found until that
moment). This creates full independence between the
particles, which are moved to their next position with
the information available at the time of the evaluation.
3 RELATED WORK
Using parallel PSO algorithms has generally the aim
of alleviating high computational costs that are asso-
ciated with the algorithm. Most of the parallel al-
gorithms, however, are not distributed, which means
they consist of multiple processing components that
communicate using shared memory, rather than mul-
tiple computers communicating over a network (Ven-
ter and Sobieszczanski-Sobieski, 2006). Further-
more, most of the parallel implementations of PSO
are based on synchronous interaction (Schutte et al.,
2004; Azimi et al., 2020). In order to solve result-
ing performance issues, (Venter and Sobieszczanski-
Sobieski, 2006) propose a distributed asynchronous
PSO solution based on a Message Passing Interface
(MPI), but do not consider fault tolerance sufficiently.
PSO has been investigated for edge optimization
concerns (Li et al., 2022; Zedadra et al., 2018). A
PSO example tailored for edge computing to demon-
strate the problem is (Rodriguez et al., 2021). Here
a Binary Multi-Objective PSO (BMOPSO) solution
with a matrix-based encoding is used to solve a work-
load placement problem. In this encoding, a parti-
cle’s position and velocity is represented in the form
of matrices which encode the placement of a module
to an edge node. The BMPOSO algorithm does re-
quire considerable time to find an optimal placement,
causing a problem for latency-sensitive applications,
e.g., workload placement. Furthermore, the optimiza-
tion problem is solvable when sufficient time and re-
sources are provided, but this is often not possible in
an edge architecture.
4 DISTRIBUTED SYNCHRONOUS
AND ASYNCHRONOUS PSO
When using PSO with coarse-grained paralleliza-
tion, a swarm is split into multiple large sub-swarms
that are evaluated in parallel either on the same
multi-processor machine or in a distributed system
composed of multiple nodes. For each iteration,
all particles are independent of each other and can
therefore be easily evaluated in parallel (Venter and
Sobieszczanski-Sobieski, 2006).
Our experiments showed that the fitness func-
tion evaluation is for many of the problem encodings
the most computationally intensive part. In (Schutte
et al., 2004) a medium-scale biomechanical system
identification problem is presented, where the fitness
function evaluation took about 1 minute. It is clear
that a standard sequential PSO algorithm could re-
sult in a significant time required for adequate re-
sults. Thus there is a need to parallelize the algorithm
around the fitness function evaluation.
The proposed solution for the distributed PSO al-
gorithm involves the design and implementation of
two variants of the distributed PSO algorithm, namely
synchronous and asynchronous. For synchronous and
asynchronous forms, timing assumptions are neces-
sary when designing a distributed algorithm. In gen-
eral, synchronous algorithms are simpler to design
because all the nodes are synchronized, whereas in
the asynchronous model there is no minimum waiting
time for synchronization between nodes, thus mak-
ing the design more complicated. In synchronous
PSO, there is a need to synchronize all the particles
A Comparison of Synchronous and Asynchronous Distributed Particle Swarm Optimization for Edge Computing
195

around iterations, whereas in the asynchronous PSO
each particle can move right after its fitness function
has been evaluated.
4.1 Distributed Synchronous PSO
We introduce here the high-level design of the dis-
tributed synchronous PSO algorithm, without pre-
senting all implementation details. The design aims
at supporting different settings rather than identifying
a one-size-fits-all solution.
In synchronous PSO, we need to synchronize all
particles using iterations. Here, we selected the mas-
ter/slave paradigm with two types of nodes; a master
node is responsible for coordinating and slave nodes
that are responsible for carrying out the computa-
tions dispatched by the master node. The choice of
master/slave is particularly suitable for a synchronous
PSO since the algorithm flow is controlled by a mas-
ter node and the functions evaluations are carried out
by slave nodes.
We have implemented two variants of the DSPSO:
the Local Update (LU) and Distributed Update (DU).
The local variant performs the update of the particles
entirely in the master, which results in faster perfor-
mance; however, it does decrease the fault tolerance.
The distributed variant performs the update of the par-
ticles by parallelizing the collection of particles across
the slave nodes.
The distributed synchronous PSO algorithm is
characterized by the following components:
• i-th particle position vector X
i
• i-th particle velocity vector V
i
• i-th particle personal best position vector P
i
• best global position vector P
g
• fitness function f
The tasks performed by master and slave nodes
are the following: Process of the master node:
1. Initializes the problem encoding parameters, po-
sitions and velocities;
2. Initializes the state of the swarm including current
iteration and received particles;
3. Starts the iteration by distributing all the particles
to the available slave nodes;
4. Waits to receive back all particles with function
evaluation and best personal position P
i
;
5. Computes for each incoming particle the best
global position P
g
until all particles are received;
6. Updates the velocity V
i
and position X
i
vectors of
each particle i based on the best personal P
i
and
global position P
g
found by all the particles;
7. Back to step 3 if last iteration is not reached;
8. Returns the best global position P
g
.
Process of a slave node:
1. Waits for a particle from the master node;
2. Evaluates the fitness function f and updates the
personal best position P
i
;
3. Sends evaluated particle back to master node;
4. Goes back to step 1 if the master is not finished.
The pseudocode of SDSPSO with DU is shown in
Figure 1, where I is the number of iterations, P is the
number of particles, N and M are the lengths of the
dimensions of the encoding.
Figure 1: Pseudocode DSPSO Distributed Update (DU).
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
196

4.2 Distributed Asynchronous PSO
The distributed asynchronous PSO also follows the
master/slave paradigm similar to the synchronous
variant. It differs in the synchronization since there
are no iterations that link together all particles. In
asynchronous PSO, each particle is independently
evaluated and moved from the other particles.
For efficiency reasons we implemented an abstrac-
tion called SuperRDD, which is essentially a collec-
tion of particles that are all dependent on each other
and are executed on the cluster as a single sub-swarm.
This means that instead of sending each single par-
ticle independently, we are grouping them into sub-
swarms of variable size [1, n], where n is the num-
ber of particles. The smaller the sub-swarm size, the
more reduced the asynchrony of the algorithms is.
However, this allows for better performance, due to
the reduced communication happening within the dis-
tributed system.
The distributed asynchronous PSO algorithm is
characterized by the following components as the
synchronous variant above. The tasks performed by
master and slave nodes are in this variant as follows:
• Master node
1. Initializes the problem encoding parameters,
positions, and velocities;
2. Initializes the state of the swarm including a
queue of particles to send to slave nodes;
3. Loads the initial particles into the queue;
4. Distributes the particles in sub-swarms from the
queue to the available slave nodes;
5. Waits and receives each sub-swarm containing
particles with their fitness function evaluation
result and best personal position;
6. Updates the best global position P
g
based on
each incoming particle;
7. Updates velocity V
i
and position P
i
vectors of
each incoming particle i based on best personal
P
i
and global position P
g
found so far;
8. Pushes particle back into queue and goes back
to step 4 if stopping condition is not met;
9. Returns the best global position P
g
.
• Slave node : same as for the synchronous variant
but is waits for a sub-swarm.
The pseudocode of DAPSO is shown in Figure 2,
where I is the number of iterations, P is the number of
particles, N and M are the lengths of the dimensions
of the encoding.
Figure 2: Pseudocode of the DAPSO algorithm.
4.3 Discussion
Even if the high-level flow the two algorithms is sim-
ilar, they are quite different both from an execution
A Comparison of Synchronous and Asynchronous Distributed Particle Swarm Optimization for Edge Computing
197

flow and accuracy perspective. The synchronous al-
gorithm requires the master to wait for all particles
to be evaluated before starting a new iteration, which
results in some slave nodes being idle especially if
the load on the cluster is imbalanced (e.g., some slave
nodes might finish before others). Moreover, it allows
for faster convergence, because the whole swarm will
converge faster towards the best global position found
by any of the particles in the previous iteration. This is
in contrast to the asynchronous algorithm, which up-
dates velocity and position of each particle as soon as
its fitness function is evaluated, effectively using the
best global position available until that point. This
results in better usage of cluster resources and more
exploration made by the swarm which can be either a
positive or a negative depending on the optimization
problem’s domain.
We now summarize key characteristics and the
discuss implementation concerns.
4.3.1 Distributed Synchronous PSO (DSPSO)
The synchronous algorithm proposed in this research
is the Distributed Synchronous PSO (DSPSO), which
is a synchronous PSO designed to be distributed
with Apache Spark in two variants with local and
distributed updates. The DSPSO algorithm realizes
coarse-grained parallelization in which each executor
node in the cluster will compute a large task, com-
posed of multiple particles whose fitness functions
will be evaluated.
4.3.2 Distributed Asynchronous PSO (DAPSO)
DAPSO is an asynchronous PSO designed to be dis-
tributed with Apache Spark. DAPSO realizes both
coarse-grained and fine-grained parallelization de-
pending on the configuration parameters, which will
make the algorithm more flexible for certain use-
cases. DAPSO differs from existing implementa-
tions such as the asynchronous PSO from (Venter and
Sobieszczanski-Sobieski, 2006), because it does not
use the parallel scheme of Message Passing Interface
(MPI) and is designed around a completely different
programming model (Spark), but uses the same mas-
ter/slave paradigm.
4.3.3 Implementation Differences
Both of the proposed algorithms are designed around
Apache Spark’s RDDs, also known as Resilient Dis-
tributed Datasets. A RDD is a partitioned distributed
memory abstraction that allows the execution of in-
memory computations on large clusters in a fault-
tolerant manner. It is the core primitive of Apache
Spark and aims at efficiently providing fault tolerance
with the use of coarse-grained transformations that
are applied in parallel to all the partitions of the RDD
DAPSO is built on top of Kotlin coroutines, which
allow the concurrent execution of multiple Spark jobs
on the cluster. In the case of DAPSO, a Spark job
is a parallel computation consisting of multiple tasks
that are executed on the cluster. Each job contains
a group of particles whose fitness function is evalu-
ated by the executor nodes. The usage of coroutines
requires a more careful design of the algorithm funda-
mentals and especially shared mutable structures such
as the best global position.
The asynchronous DAPSO algorithm is also more
complicated than its synchronous DSPSO counterpart
because the programming model of Apache Spark is
not totally suitable for asynchronous use-cases. How-
ever, it allows multiple jobs to be executed concur-
rently on the same cluster. This aspect of Spark re-
quired an implementation that involved new ideas in
order to balance efficiency and asynchrony.
Specific lessons learned show a trade-off between
asynchrony and performance. The first design of
the asynchronous algorithm was based on two corou-
tines, one to schedule Spark jobs each with a Spark
RDD that contained a single particle, and run the fit-
ness evaluation on the cluster, while the other asyn-
chronously collects result of each job, update particle
velocity/position locally and send back the particle as
a new Spark job. This first implementation realized
full asynchrony because each particle was fully inde-
pendent of the others and was evaluated as soon as an
executor was free. Nonetheless, this design was rather
inefficient, because it ended up creating several Spark
jobs that were executed only for a few milliseconds.
A large number of Spark jobs resulted in significant
overhead which was especially noticeable on simpler
optimization problems. For the aforementioned rea-
sons, we had to reconsider more efficient ways of re-
ducing the number of jobs, but at the same time keep-
ing a good level of asynchrony. The specific remedy
is presented in the next subsection.
4.3.4 Asynchrony vs. Performance: SuperRDDs
In order to solve the above performance issue, we pro-
pose an abstraction called SuperRDD. This is a col-
lection of particles, which are all dependent on each
other and that are executed on the cluster as a single
Spark RDD. The idea of SuperRDD aims to improve
the efficiency of the algorithm by reducing the degree
of asynchrony. In the context of Apache Spark, this
could be solved by grouping multiple particles within
a single RDD which was evaluated by the cluster. Su-
perRDDs result in fewer Spark jobs to be scheduled,
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
198

but at the cost of less asynchrony, as particles belong-
ing to one SuperRDD must wait for all other particles
to be evaluated.
We allow more flexibility by making the size of
a SuperRDD configurable in the interval [1, n] with
1 being full asynchrony and n no asynchrony at all
(n denotes the number of particles). A SuperRDD
of size 1 thus essentially resembles the initially in-
troduced idea of having one Spark job for each par-
ticle. Then, a SuperRDD of size n is similar to the
synchronous PSO, where each particle waits for all
other particles to be evaluated first before proceeding
to update its own velocity and position. The differ-
ence between DSPSO and DAPSO with SuperRDDs
of size n is only the way in which the particles are
updated. In the first case, we update velocities and
positions once a single best global is computed for all
particles. This results in all particles to update their
velocities and positions with the same global best po-
sition. In the second case, we update velocities and
positions with an ever-changing best global position
updated after each particle evaluation.
4.4 Conceptual Comparison
The main strength of DSPSO is in the exploitation of
the information, meaning that we always have to wait
for each particle to conclude exploring, hence leading
up to a possible better global position. On the other
hand, the main strength of DAPSO is that particles are
updated using partial information, leading to stronger
exploration. A major problem of SPSO, which will
be even more evident when distributing the algorithm,
is that the first evaluated particle will be idle for the
longest time, hence if we consider an imbalance in
the cluster resources, we might have nodes waiting in-
stead of performing useful work. This problem does
not apply to DAPSO because the progress made by
any particle does not depend on other particles or it-
erations. Therefore, cluster resources can be used to
their maximum capacity at any point during execu-
tion.
5 EVALUATION AND
DISCUSSION
The focus of the evaluation is now the performance
of the different algorithms in terms of performance
time, while also taking into consideration fault toler-
ance properties of the PSO algorithms in the context
of the platforms used.
5.1 Evaluation Methodology
The goal of this evaluation is to understand, firstly, if
the distributed algorithms are more performant than
non-distributed counterparts and, secondly, to distin-
guish synchronous and asynchronous variants. The
evaluation of the performance has been done by tak-
ing into consideration the time needed for the execu-
tion. In order to make measurements suitably accu-
rate, we created a benchmarking abstraction that uses
the monotonic clock. The usage of this clock guar-
antees that the time always moves forward and is not
impacted by any variations such as the clock skew.
We ran our experiments multiple times and took the
best measurements out of the runs. Multiple experi-
ments allowed us to notice and isolate any outlier ex-
ecutions.
The algorithms evaluated include the traditional
PSO, DSPSO with local velocity/position update and
DSPSO with distributed velocity/position update and
also DAPSO as the asynchronous variant. In order to
test performance, we used various scenarios in which
only one of the parameters was increased at a time and
others kept unchanged (e.g., increase only the number
of the particles). This helps to identify bottlenecks
and how the algorithms react to an increase in com-
plexity in certain parts.
In order to test the performance of the four al-
gorithms, we implemented our distributed algorithms
for workload placement problem encoding from (Ro-
driguez et al., 2021) that was also introduced earlier.
We used a matrix data structure D for this which is
composed of the set of nodes F and the set of mod-
ules M. Furthermore, the fitness function here aims
to minimize the maximal amount of resources needed
by a given set of modules if deployed at specific edge
node.
The encoding implementation in total required an
adaptation of data structures, the fitness function and
also the particle velocity/position update formulas,
but did not require changes to the high-level flow of
the algorithms. We chose this specific encoding for
the evaluation since it provides a meaningful applica-
tion of distributed PSO in an edge computing archi-
tecture, i.e., it is a relevant challenge to be solved at
the edge.
5.2 Evaluation Setup
The evaluation of the distributed algorithms has been
accomplished by executing the algorithm in a virtual-
ized Kubernetes cluster. The goal of the cluster was to
simulate an edge computing environment with multi-
ple nodes connected to each other.
A Comparison of Synchronous and Asynchronous Distributed Particle Swarm Optimization for Edge Computing
199

For a virtualized Kubernetes cluster, we used
minikube, which implements a local Kubernetes clus-
ter. The Kubernetes cluster was provisioned on a
MacBook Pro 2017 using minikube. The configura-
tion of minikube was set to use 8 virtual CPUs and
8192MB of RAM.
The cluster topology used for the expirement was
composed of a set of four pods that were scheduled
on a single minikube virtual node. One pod was used
as the driver and had one core, whereas the remain-
ing three pods were executor nodes with two cores
each. In total, we used 7 CPUs/cores. We could not
utilize all 8 cores provisioned because the remaining
core was taken by the pods concurrently running, such
as the Spark, Kubernetes dashboard, and other sup-
porting services.
5.3 Evaluation Results
As a performance measure we use the elapsed time
needed by an algorithm to perform the optimization
until a stopping condition is met. This differs from
the convergence speed – another performance metric
which represents how quickly an optimization algo-
rithm converges towards an optimal value.
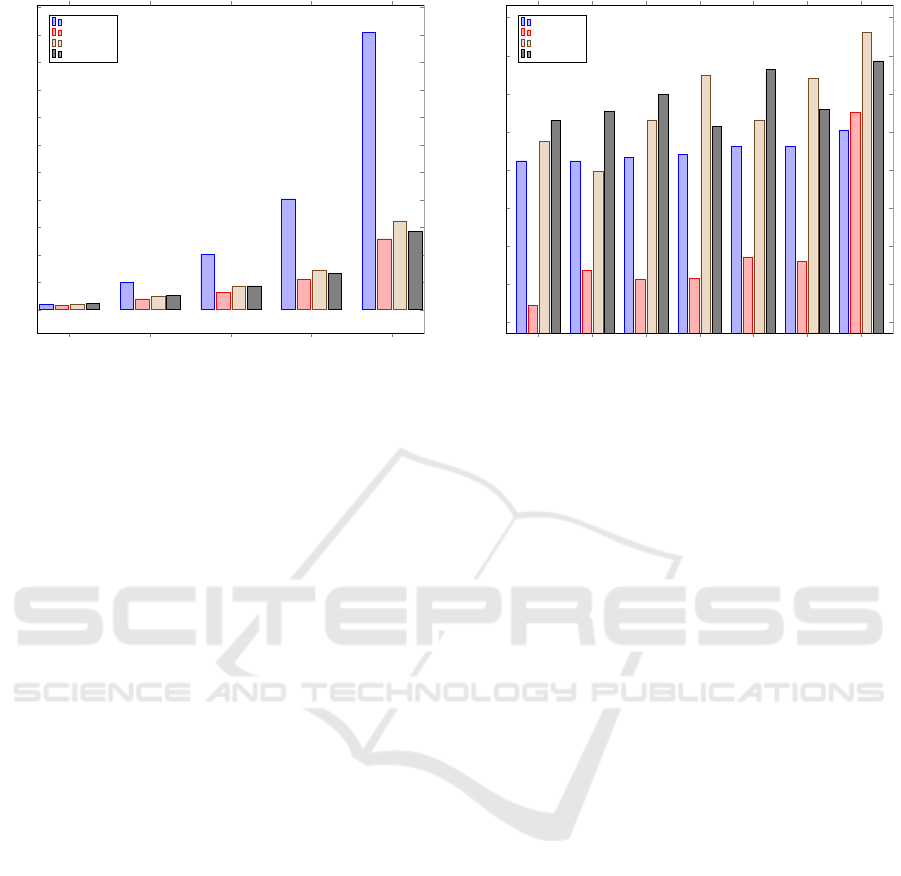
5.3.1 Particles Increase Benchmark
The first evaluation part considers the algorithms ex-
ecuted with an increasing number of particles while
other parameters are fixed. The goal is to under-
stand the effects of increasing only the particle num-
ber since each algorithm handles the particles differ-
ently. We aim to verify if these differences impact
on performance. The experiment setup was the fol-
lowing: # particles = 10, 50, 100, 200, 500, 1000; #
iterations = 10; # edge nodes = 10; # modules = 10;
and 50ms fitness function artificial delay.
The observations in Fig. 3 indicate that for 10
particles the three distributed algorithms perform
marginally worse than a traditional PSO algorithm.
This can be expected as the overhead introduced by
Spark is here noticeable for a small optimization
problem. When the number of particles increases, the
distributed algorithms do get significantly faster than
a traditional PSO implementation. On average, the
speedup achieved is five times, which is correlated to
the number of CPUs used for execution, which are in
this case six (3 pods with 2 cores each). This correla-
tion exists since if we have an amount of work x and
we spread this over n executors, this will result in the
best case scenario in a
x
n
amount of work per executor.
There are other differences between the dis-
tributed algorithms. Between DSPSO with the LU
and DU variants, there is a some performance gain
10 particles 50 particles 100 particles 200 particles 500 particles 1000 particles
0
50
100
150
200
250
300
350
400
450
500
550
Elapsed Time (seconds)
Traditional PSO
SDSPSO with LU
SDSPSO with DU
SDAPSO
Figure 3: Performance evaluation: change # of particles.
for the LU variant because of the in-memory update
of particles, which is slightly faster despite being at
the same time less fault-tolerant. The DAPSO algo-
rithm results in comparison to be the slowest of the
distributed algorithms because the synchronous algo-
rithms produce 1 job or 2 jobs per iteration depending
on the variant. The asynchronous algorithm produces
a number of jobs that is directly proportional to the
number of particles and iterations, thus introducing
additional overhead. An important aspect to note is
that DAPSO used on average more particles than the
other algorithms, caused by the rounding performed
by the algorithm.
5.3.2 Iterations Increase Benchmark
The second of the evaluations considers the algo-
rithms executed using an increasing number of iter-
ations and other parameters being fixed. The goal
is to determine if more Spark jobs generated by the
synchronous algorithms impact on their performance.
This is caused, because we create 1 job or 2 jobs per
iteration, ultimately resulting in more Spark jobs be-
ing executed. The experiment setup was the follow-
ing: # particles = 20; # iterations = 10, 50, 100, 200,
500; # edge nodes = 10; # modules = 10; and 50ms
fitness function artificial delay.
The observed results shown in Fig. 4 demon-
strate similar behavior to the earlier increase in par-
ticle numbers. However, one difference concerns the
further reduced performance of synchronous DSPSO
with DU compared to DSPSO with LU. With the
increase of iterations, the number of Spark jobs in-
creased significantly. As an example, for 500 it-
erations the number of Spark jobs results in 1000
for DSPSO with DU and 500 for DSPSO with LU.
The observed performance difference is not signifi-
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
200
10 iterations 50 iterations 100 iterations 200 iterations 500 iterations
0
50
100
150
200
250
300
350
400
450
500
550
Elapsed Time (seconds)
Traditional PSO
SDSPSO with LU
SDSPSO with DU
SDAPSO
Figure 4: Performance evaluation: change # of iterations.
cant, but indicates that the overhead of Spark must
be taken into account when choosing the right vari-
ant. As above, In general, we obtained here also a
five times speedup of the distributed algorithms com-
pared to the implemented traditional PSO. A similar
speedup shows that the algorithms perform equally
well irrespective of the specific parameters that have
been increased.
5.3.3 Dimensionality Increase Benchmark
The third evaluation form considers algorithms exe-
cuted with an increasing number of nodes and mod-
ules and again other parameters fixed. The goal is
here to understand if an increase in problem dimen-
sionality affects the algorithm, especially because the
broadcast variables and accumulators can propagate
data that is tied to the dimensionality of the problem
(such as the accumulator that keeps track of the best
global position, which includes the entire matrix of
placements and errors). The experiment setup was the
following: # particles = 20; # iterations = 10; # edge
nodes = 5, 10, 20, 50, 70, 100, 200; # modules = 5,
10, 20, 50, 70, 100, 200; and 50ms fitness function
artificial delay.
The results shown in Fig. 5 indicate that the num-
ber of nodes and modules does impact on the perfor-
mance of the algorithms. The impact on performance
is more noticeable for the distributed algorithms, due
to their usage of shared variables and the continuous
data transfer between nodes, that all internally per-
form serialization and deserialization activities. Fur-
thermore, there is also a slight increase in the elapsed
time across all algorithms because each stage of the
algorithm does effectively take more time, caused by
the quadratically increasing number of combinations
to be considered.
5 x 5 10 x 10 20 x 20 50 x 50 70 x 70 100 x 100 200 x 200
6
7
8
9
10
11
12
13
14
Elapsed Time (seconds)
Traditional PSO
SDSPSO with LU
SDSPSO with DU
SDAPSO
Figure 5: Performance evaluation: change # of nodes.
For this evaluation the number of particles is also
rounded for the DAPSO algorithm and it is more ev-
ident in this experiment due to the small number of
particles used.
5.4 Final Considerations
5.4.1 Discussion for DSPSO
Our DSPSO algorithms were designed to address the
performance problem of the traditional PSO, but also
through the technology stack fault tolerance. The per-
formance of the DSPSO algorithm is improved by
using multiple executor nodes that can evaluate the
fitness function in parallel. The performance bene-
fits are more clear for complex optimization problems
since here the overhead caused by Spark is less of a
concern. We can also note that the performance in-
crease is dependent on the cluster configuration, in-
cluding the number of executor nodes, communica-
tion channels, the partitioning scheme, and also the
computational resources at each node. This does,
however, not imply that more nodes and partitions re-
sults in better algorithm performance, only because
the overhead introduced by Spark increases.
An important aspect regarding performance is that
the chosen problem encoding for DSPSO must take
into account the communication cost. This is notably
more than a traditional PSO solution. The most no-
ticeable improvement is to reduce the size and amount
of data propagated within the cluster (simpler data
structures or more efficient serialization as examples)
as much as possible.
Fault tolerance is improved in comparison with
the non-distributed PSO due to the resiliency of
Spark’s RDDs. The RDD for the fitness function eval-
uation and also velocity/position update can easily be
A Comparison of Synchronous and Asynchronous Distributed Particle Swarm Optimization for Edge Computing
201

redone if failures occur in the executor nodes. The
re-execution of the function evaluation produces de-
terministic results, while the re-execution of the latter
results in non-deterministic results due to the stochas-
tic nature of parameters used in velocity and position
updates. The non-determinism does not create prob-
lems but results in different positioning of some parti-
cles. Furthermore, the DU variant of the algorithm is
more fault-tolerant but less performant, caused by the
added distributed collection. This variant suits when
the velocity/position update is computationally more
demanding and more fault tolerance is needed.
The only possible point of failure of the DSPSO
variant is the driver program that manages the full al-
gorithm lifecycle including the state. Spark does not
provide a resiliency mechanisms for the driver, this
resiliency needs to be achieved at node level. A driver
failure could result in a full loss of data.
5.4.2 Discussion for DAPSO
The DAPSO implementation is designed to address
the performance problem, and also fault tolerance
compared to the traditional PSO while being executed
in an edge computing environment. The main ob-
servations of the DSPSO algorithm do also apply to
DAPSO. However, some further observations shall be
made.
The performance of DAPSO is dependent on the
SuperRDD size. This implies that a smaller Super-
RDD results in the lower performance but more asyn-
chrony as a trade-off, whereas a larger SuperRDD
results in better performance but lower asynchrony.
The choice of the SuperRDD size depends on avail-
able cluster resources, because an asynchronous algo-
rithm can be expected to perform better compared to a
synchronous variant when executed in an imbalanced
cluster. This performance difference becomes clear in
an imbalanced cluster because some nodes could re-
main idle while waiting for other slower nodes to end
with the fitness evaluation of particles in their parti-
tion. Consequently, the more imbalanced the cluster
is, the fewer particles should be set within a Super-
RDD.
The algorithm’s fault tolerance is also on similar
to DSPSO. The fault tolerance of the driver can be
improved with a state replication of the driver across
multiple devices. However, this is out of scope for
this work as it would require a considerable amount
of exploration.
5.5 Synchronous vs Asynchronous
In conclusion, the synchronous and asynchronous de-
signs have proved to be both valid solutions during
our evaluations. However, they have slight differ-
ences that will play an important role when decid-
ing on the algorithm to use. Due to the mostly non-
deterministic nature of distributed systems, it is not
always possible to decide upfront which algorithm to
use, initial real-world testing could identify some sys-
tem characteristics for the decision.
The synchronous algorithm is simpler and more
efficient in general because it runs a single Spark job
per iteration (two in the case of DSPSO with DU),
which translates to less overhead by Spark because
it will need to perform fewer optimizations, DAG
management, and lineage maintenance. Nevertheless,
DSPSO uses one more shared variable in contrast to
DAPSO, which is the accumulator used to keep track
of each best local position of each sub-swarm and to
compute the final best global position. The usage of
an accumulator is certainly an additional overhead,
but in our tests we did not observe it to be noticeably
influential on the performance. DSPSO is also sim-
pler than the asynchronous design because it is based
on strict iterations and clearly defined sequences of
operations that do not require any tricky implementa-
tion. The simplicity aspect as stated earlier is an im-
portant property of both algorithms, especially con-
sidering that they need to be adapted each time a new
problem encoding needs to be implemented.
The asynchronous algorithm, on the other hand,
is more complex and in general less efficient than the
synchronous counterpart, however, it is meant to be
flexible and suitable for specific use cases. Given the
fact that DAPSO has near to complete independence
between particles, depending on the configured Su-
perRDD size, it has the ability to work well in clus-
ters where the resources are imbalanced. An imbal-
anced cluster is characterized by a heterogeneous set
of nodes that have all different computational capa-
bilities and therefore will take different amounts of
time to perform the same tasks dispatched by Spark.
With the asynchronous algorithm, we are able to re-
alize fine-grained parallelism, using a small Super-
RDD size in order to have several Spark jobs with
fewer particles executed concurrently. When faced
with multiple concurrent jobs, Spark will automati-
cally try to optimize as much as possible the available
cluster resources. For example, if a node is idle be-
cause it is faster than the others then Spark will start a
task that might belong to a different Spark job on the
idle node. A problem of DAPSO, besides the over-
head introduced by the high number of Spark jobs,
is the complexity of the implementation. The asyn-
chronous algorithm uses a multitude of concurrent
primitives and techniques to manage multiple jobs
and shared mutable states, therefore it is more com-
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
202

plex to work on and requires a careful modification of
the core components.
In conclusion, both variants of the distributed
PSO algorithm have their advantages and disadvan-
tages. Due to the multitude of configuration param-
eters available (e.g., SuperRDD size, number of par-
titions, nodes in the cluster, cores per node) it is not
possible to identify one as the "best" one. Therefore
only a real production setting will be able to identify
the most suitable variant for a specific use case – for
which we have given some indicators.
6 CONCLUSIONS
In this paper, we proposed distributed variants of
the PSO algorithm that were implemented on top of
Apache Spark, specifically an asynchronous variant
called DAPSO and two synchronous variants called
DSPSO with Local Update (LU) and Distributed Up-
date (DU). The variants provide options for different
performance and fault tolerance needs.
In our evaluation, we compared our solutions ex-
perimentally with the traditional PSO. We demon-
strated that our distributed algorithms perform bet-
ter than the traditional PSO, resulting on average in
a five times speed improvement. Only in small cases,
the traditional PSO solution performs better concern-
ing elapsed time, but does not provide either adequate
fault tolerance. Fault tolerance is also considered by
tailoring our distributed variants to specific features
offered by the implementation platforms. We pro-
vided indications in which particular situations one
of the three distributed variants would be most bene-
ficial.
In the future, we intend to improve the perfor-
mance of our distributed algorithms by fine-tuning
their implementation better to Apache Spark features.
In conclusion, also testing the algorithms in real-
world scenarios should be performed, to fully validate
our assumptions.
REFERENCES
Azimi, S., Pahl, C., and Shirvani, M. H. (2020). Parti-
cle swarm optimization for performance management
in multi-cluster iot edge architectures. In CLOSER,
pages 328–337.
Bonomi, F., Milito, R., Zhu, J., and Addepalli, S. (2012).
Fog computing and its role in the internet of things. In
MCC workshop. ACM.
Hoang, K. D., Wayllace, C., Yeoh, W., and et al. (2019).
New Distributed Constraint Satisfaction Algorithms
for Load Balancing in Edge Computing: A Feasibility
Study.
Kennedy, J. and Eberhart, R. (1995). Particle swarm op-
timization. In ICNN’95 International Conference on
Neural Networks. IEEE.
Li, A., Li, L., and Yi, S. (2022). Computation Offload-
ing Strategy for IoT Using Improved Particle Swarm
Algorithm in Edge Computing. Wireless Communica-
tions and Mobile Computing, 2022:1–9.
Mahmud, R., Ramamohanarao, K., and Buyya, R. (2020).
Application Management in Fog Computing Environ-
ments: A Taxonomy, Review and Future Directions.
ACM Computing Surveys, 53(4):88:1–88:43.
Pahl, C. (2022). Research challenges for machine learning-
constructed software. Service Oriented Computing
and Applications.
Rodriguez, O., Le, V., Pahl, C., El Ioini, N., and Barzegar,
H. (2021). Improvement of Edge Computing Work-
load Placement using Multi Objective Particle Swarm
Optimization. In (IOTSMS’21).
Salaht, F. A., Desprez, F., and Lebre, A. (2020). An
Overview of Service Placement Problem in Fog
and Edge Computing. ACM Computing Surveys,
53(3):65:1–65:35.
Schutte, J. F., Reinbolt, J. A., Fregly, B. J., Haftka, R. T.,
and George, A. D. (2004). Parallel global optimiza-
tion with the particle swarm algorithm. Intl Jrnl for
Numerical Methods in Eng, 61(13):2296–2315.
Scolati, R., Fronza, I., El Ioini, N., Elgazazz, A. S. A., and
Pahl, C. (2019). A containerized big data streaming
architecture for edge cloud computing on clustered
single-board devices. In CLOSER.
Venter, G. and Sobieszczanski-Sobieski, J. (2006). Paral-
lel Particle Swarm Optimization Algorithm Acceler-
ated by Asynchronous Evaluations. Jrnl of Aerospace
Comp, Inform, and Comm, 3(3):123–137.
Wang, D., Tan, D., and Liu, L. (2018). Particle swarm
optimization algorithm: an overview. Soft Comp.,
22(2):387–408.
Zedadra, O., Guerrieri, A., Jouandeau, N., Spezzano,
G., Seridi, H., and Fortino, G. (2018). Swarm
intelligence-based algorithms within IoT-based sys-
tems: A review. Jrnl of Par and Distr Comp, 122:173–
187.
A Comparison of Synchronous and Asynchronous Distributed Particle Swarm Optimization for Edge Computing
203
