
Lightweight and Self Adaptive Model for Domain Invariant Bearing
Fault Diagnosis
Chandrakanth R Kancharla
1 a
, Jens Vankeirsbilck
1 b
, Dries Vanoost
2 c
, Jeroen Boydens
1 d
and Hans Hallez
1 e
1
M-Group, DistriNet, Department of Computer Science, KU Leuven Bruges Campus, 8200 Bruges, Belgium
2
M-Group, WaveCoRE, Department of Electrical Engineering, KU Leuven Bruges Campus, 8200 Bruges, Belgium
Keywords:
Condition Based Monitoring, Self Adaptation, Resource Constrained Computing, Bearing Fault Diagnosis,
Domain Invariance.
Abstract:
While the current machine fault diagnosis is affected by the rarity of cross conditional fault data in practice, ef-
ficient implementation of these diagnosis models on resource constrained devices is another active challenge.
Given such constraints, an ideal fault diagnosis model should not be either generalizable across the shifting
domains or lightweight, but rather a combination of both, generalizable while being minimalistic. Prefer-
ably being uninformed about the domain shift. Addressing these computational and data centric challenges,
we propose a novel methodology, Convolutional Auto-encoder and Nearest Neighbors based self adaptation
(SCAE-NN), that adapts its fault diagnosis model to the changing conditions of a machine. We implemented
SCAE-NN for various cross-domain fault diagnosis tasks and compared its performance against the state-of-
the-art domain invariant models. Compared to the SOTA, SCAE-NN is at least 6−7% better at predicting fault
classes across conditions, while being more than 10 times smaller in size and latency. Moreover, SCAE-NN
does not need any labelled target domain data for the adaptation, making it suitable for practical data scarce
scenarios.
1 INTRODUCTION
Cloud computing is one of the major facilitators of
data analytics and intelligent decision making for in-
dustrial processes and machines. Although the com-
bination of IoT and cloud computing provides infinite
computing and storage resources for the previously
remote machines, few challenges exist in fully cen-
tralizing the computation on the cloud (Wang et al.,
2020). Some critical challenges in the context of In-
dustrial IoT are, limited bandwidth, latency and reli-
ability of the connection. While IoT enabled devices
can continuously gather data from the machines and
their environments, their bandwidth availability lim-
itations cannot accommodate high data throughput.
This in combination with the latency of the data/ deci-
sion communication and connection reliability to the
a
https://orcid.org/0000-0002-1498-4296
b
https://orcid.org/0000-0003-0038-588X
c
https://orcid.org/0000-0002-7126-9758
d
https://orcid.org/0000-0002-7902-8537
e
https://orcid.org/0000-0003-2623-9055
cloud might lead to a catastrophe. Contrary to the
cloud, computing on the edge not only brings the la-
tency to ms scale but also reduces the overall opera-
tional costs by reducing the volume of data that has
to be migrated across the networks (Qiu et al., 2020).
With computing brought to the edge, the data is read-
ily available for knowledge extraction and faster deci-
sion making.
While edge computing can aid many time criti-
cal applications, bearing fault diagnosis is one ma-
jor field that can readily benefit from the low latency
computing at the edge. The components of a rotat-
ing machinery like a motor often fail, leading to com-
plete machine downtime or production quality reduc-
tion. According to Salah et al. (Salah et al., 2019),
up to 90% of small motors’ downtime is due to bear-
ing faults, and 40-44% for large motors. Real-time
characterization and detection of such frequently oc-
curring faults may allow the stake-holders to take an
appropriate and in-time action to avoid catastrophic
scenarios.
Summarizing the bearing fault diagnosis litera-
ture, the current State-Of-The-Art (SOTA) is majorly
Kancharla, C., Vankeirsbilck, J., Vanoost, D., Boydens, J. and Hallez, H.
Lightweight and Self Adaptive Model for Domain Invariant Bearing Fault Diagnosis.
DOI: 10.5220/0011822700003482
In Proceedings of the 8th International Conference on Internet of Things, Big Data and Security (IoTBDS 2023), pages 29-38
ISBN: 978-989-758-643-9; ISSN: 2184-4976
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
29

concentrated on deep learning models (Gawde et al.,
2022; Shan et al., 2022; Zhao et al., 2020). While
some of these proposed methods show impressive
performance, they ignore the fact that the data distri-
bution in practice may not always be the same as the
one used during the training (Pan and Yang, 2009).
The changing conditions of a machine, environmen-
tal noise, sensor deviation, etc can introduce domain
shift in the data. That is, the properties of the data do
not remain consistent across the training phase and
the real world inference. Thus leading to a deteri-
orated diagnostic model performance over the time.
Considering the above discussed restrictions, an ex-
emplary domain invariant model has to be efficient
for the shifting domains while using as low computa-
tional resources as possible.
This article answers these aspects by:
• First, benchmarking the state-of-the-art domain
invariant methods for their performance, accu-
racy, latency and model footprint.
• Second, proposing a novel self adaptive fault di-
agnosis model and comparing it to the SOTA
models for both cross conditional efficiency and
computational resource usage.
The article is organised as follows. We briefly
discuss the background of domain invariance in sec-
tion 2. Section 3 provides necessary details to un-
derstand the experimental setup. Section 4 discusses
the benchmark results. Which is followed by the pro-
posed methodology in Section 5. Section 6 and 7
summarizes the experimental results and conclusions
respectively.
2 BACKGROUND
There are predominantly three different research ar-
eas that investigate the domain invariance. They
are, learning domain invariant features from single-
source data, learning domain invariant features from
multiple-source data and lastly, domain adaptation
methods that re-adjust their prediction models to the
new domain.
If we consider that the data D
k
of an application is
available from three different domains k = 1,2, 3, the
data available for training in the form of source data
D
s
= D
s
{k}
is what will define these areas of diagnos-
tic model generalization research. Single-source do-
main generalization is where one domain’s data (D
s
=
D
1|2|3
) is used for model training and extracting do-
main invariant features that are generalizable across
the other two respective domains (D
t
= D
!1|!2|!3
).
Here | implies ’or’ and ! is ’not’. The effectiveness
of this strategy can be understood from works like
Yang et al., where they proposed a data augmentation
strategy to learn a generalizable deep neural network,
and our previous work, where we presented the usage
of latent features of a Convolutional Auto-encoder as
generalizable features across domains (Yang and Li,
2021; Kancharla et al., 2022).
Though the above discussed articles show the ef-
fectiveness of the single-source based generalization
models, Zheng et al. and An et al. suggest that the
multi-source domain based models are a practical ne-
cessity (Zheng et al., 2021; An et al., 2019). Multi-
source generalization involves considering multiple
source data (D
s
= D
1&2|2&3|3&1
) to train and test
generalizability performance on the left out domain
data (D
t
= D
3|1|2
). Here & represents ’and’. Var-
ious research results favor the argument of multi-
source domain generalization, but the fact that the
data is a scarce resource limits these methods in prac-
tice (Zheng et al., 2021; An et al., 2019; Zhang et al.,
2021; Zhao and Shen, 2022; Li et al., 2022).
To overcome the shortcomings of the single- and
multi-source generalization, domain adaption is pro-
posed. The domain adaptation method is where the
model trained with source domain data is adapted to
the other domains through model fine tuning or distri-
bution alignment strategies in the feature space. Liu
et al. proposed an effective Domain Adversarial Neu-
ral Network (DANN) that can adapt to real world
data whilst being trained only with simulated bear-
ing fault data (Liu and Gryllias, 2022). Another study
by Li et al., studied the effectiveness of Central Mo-
ment Discrepancy (CMD) based domain adaptation
where the target domain data is assumed available but
without the class labels (Li et al., 2021). Maximum
Mean Discrepancy (MMD) and adversarial learning
based feature space adaptation (Wu et al., 2022) and
Multi Kernel-MMD based (Wan et al., 2022) strate-
gies are also effective and considered state-of-the-art.
Assessing the lack of uniformity and ease of compar-
ison, Zhao et al. studied various state-of-the-art do-
main adaptation methods in their comparative analy-
sis (Zhao et al., 2021).
Whilst being relatively high on data demand, do-
main adaptation can be considered more resilient and
safer option for achieving domain invariance as it
adapts rather than assumes. Which is not the case with
single and multi-source domain generalization mod-
els, they assume that domain invariant features exist
across new unknown conditions.
Even though the domain adaptation models are
relatively more employable in practice, it’s challeng-
ing to use them for two reasons. Firstly, the current
domain adaptation models for bearing fault diagnosis
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
30

use labelled target domain data to adapt. Which is in-
feasible to obtain in practice. The other reason is that
the adaptation process involve deep model relearning
which is computationally expensive. Whereas the real
world use cases necessitate implementation closer to
the edge, meaning low computational resource avail-
ability. These restrictions necessitate a new genre
of domain adaptation methodology that is accurate
across changing conditions whilst being computation-
ally efficient. More importantly, it should not require
labelled target domain data for the adaptation.
Addressing the above mentioned restrictions, we
first analysed the SOTA models for their cross condi-
tional efficiency and resource utilization. A new do-
main adaptation model is proposed based on Convo-
lutional Auto-encoder and Nearest Neighbours (CAE-
NN). The proposed model is computationally efficient
compared to SOTA models. It has low latency predic-
tions, achieves better accuracy across conditions by
self adaptation and more importantly its simplistic do-
main adaptation routine has negligible computational
overhead compared to its inference.
3 EXPERIMENTAL SETUP
In this section we discuss the experimental setup used
for this investigation. First, various domain adapta-
tion methodologies from the literature that are worth-
while in terms of accuracy are introduced. Second,
various open source data-sets used for the perfor-
mance bench-marking are discussed. Finally, the de-
tails of the resources used for the experimentation are
provided.
3.1 Domain Invariant Models for
Comparison
Low data dependency during training is the major
consideration for choosing models for comparison in
this article. i.e., keeping the use-case as close to the
real-world as possible, we restricted this selection to
the models that use just the single-source data dur-
ing the training process. They are single-source do-
main generalization models and single-source domain
adaptation models.
3.1.1 Domain Generalization Models
From the literature, we consider two domain gener-
alization methods. While a Neural Network trained
on the data augmented samples proved to be domain
invariant in the case of (Yang and Li, 2021), the pro-
posal of Kancharla et al. was to use the latent features
of a CAE along with a K-Nearest Neighbors approach
as a domain invariant model (Kancharla et al., 2022).
Considering the provided results in the respective ar-
ticles, both approaches are considered for comparison
in this work.
3.1.2 Domain Adaptation Models
As discussed in Section 2, there are numerous pro-
posals and variations for domain adaptation, each for
a specific use-case or an application. Reproducing
and comparing them against each other was hard until
Zhao et al.’s work, where the authors compared com-
pared various domain adaptation strategies with a uni-
form data setting and model backbone. From their
benchmark study we understand that their are a few
competitive methodologies for different variations of
DA applications. Particularly for label consistent DA,
i.e., where labels in the source and target domain are
homogeneous, there are four methods that have con-
siderable performance. Multi kernel-Maximum Mean
Discrepancy (MK-MMD) is one of them, which re-
duces the marginal distributions of the source and
the target domains in the reproducing Hilbert Kernel
Space. Unlike MMD, MK-MMD uses multiple ker-
nels to embed the feature space and minimize the dis-
tance between the marginal distributions of the source
and the target domain (Gretton et al., 2012). The
other feature alignment method is based on adapt-
ing the model to the target domain by reducing both
the marginal and conditional distributions between
the source and target domains, it is referred to as
Joint MMD (JMMD) (Long et al., 2016). While the
models mentioned above were competitively placed
in terms of performance, the domain adversarial loss
minimization based methods like Domain Adversar-
ial Neural Network (DANN) and Conditional Domain
Adversarial Network (CDAN) demonstrated overall
best mean performance (Zhao et al., 2021). They re-
spectively introduce and minimize marginal and joint
adversarial loss of the Neural Network model train-
ing through a domain discriminator. The reduced loss
thus results in a model that is domain agnostic.
An important aspect of these domain alignment
or adversarial models is having an appropriate feature
extractor, also referred to as the backbone model. A
good backbone leads to a better feature representa-
tions and eventually better domain adaption possibil-
ities.
3.1.3 Backbone Model
Although numerous deep neural network architec-
tures exist, we restricted this study to just two deep
models to compare the above selected methods. Thus,
Lightweight and Self Adaptive Model for Domain Invariant Bearing Fault Diagnosis
31

four best performing adaptation methods in combina-
tion with two different deep feature extractors will be
used to benchmark and compare. We included the re-
sults of both standard Convolutional Neural Network
(CNN) and RESNET 18 backbones in this study to
quantify and appropriately discuss the trade-off be-
tween the model size and the efficiency of domain
adaptation. The same CNN architecture is used for
the shadow label based domain generalization evalua-
tion to remove any architectural advantage. Whereas,
the model architecture of the CAE from CAE-NN is
consistent to the original paper as it is an unsuper-
vised feature learner and is different to the other meth-
ods considered here (Kancharla et al., 2022). The
summary of the architectures used and their respec-
tive Floating Point Operations (FLOPs) necessary for
inferring one input of size (1,256) is presented in Ta-
ble 1. We can see from Table 1 that CAE network
used for inference is much shallower compared to the
CNN and RESNET, making the concept of architec-
tural advantage irrelevant.
Table 1: Backbone models’ architecture and FLOPs for a
256 input size.
Model Architecture MFLOPs
RESNET 18
⊛
;1
‡
;1
⋆
46.19
CNN 4
⊛
;2
‡
;4
ג
;3
⋆
4.37
CAE 2
⊛
;2
‡
;2
⋆
0.32
⊛
convolution layers;
‡
pooling layers;
⋆
f ully connected/dense layers;
ג
batch normalization layers
3.2 Datasets
Various open-source bearing fault datasets are ideal
for algorithmic evaluation (Zhao et al., 2020). In
this paper, we will use two datasets with extensive
vibration data, the Case Western Reserve University
dataset (CWRU) and the Paderborn University dataset
(PU) (Lessmeier et al., 2016; Smith and Randall,
2015). While the (CWRU) dataset is frequently used
in the studied literature, (PU) is also widely referred.
With four different conditions (load = 0,1,2,3 Hp)
and 10 different faulty and non-faulty classes, the
CWRU dataset can be considered relatively easy to
diagnose (Zhao et al., 2020). While the provided data
files consist of vibration data sampled at 12 kHz and
48 kHz from both the motor’s driving and fan end,
only the drive end data collected at 12 kHz is used in
this study.
Whereas, the PU dataset has a unique combina-
tion of machine conditions that vary in multiple di-
mensions. Rotating speed (1500 and 900 RPM), ap-
plied Radial force (1000 and 400 N) and Load torque
(0.7 and 0.1 Nm). With four different combinations
of the three variables as mentioned above, PU dataset
entails 6 healthy classes, 12 artificial fault classes and
14 natural run to failure fault classes. Each of these
class’ data is collected for four seconds at 64 kHz
for 20 times. Given the large amount of data for the
PU dataset, randomly selected five files of each class
were used for training and testing. Notably, the aver-
age accuracies across some of the state-of-the-art do-
main adaptation methodologies on PU dataset is very
low (Zhao et al., 2021). This makes it one of the most
complex datasets currently available to validate do-
main invariance.
3.2.1 Experimental Tasks
Given four different conditions in CWRU and PU
datasets each, there are 12 different experimental
tasks possible individually. Each experimental task
is defined as, one condition’s data within a dataset
as training data and another condition’s data within
the same dataset as test data. While all the 24 tasks
have been experimented with, we summarize the re-
sults with one critical task from each dataset to re-
duce the overwhelming amount of information. The
critical task here is defined by the transfer of informa-
tion across majorly different conditions. According
to our experiments and the benchmark study (Zhao
et al., 2021) these critical tasks are C3-C0 and P2-
P0 from CWRU and PU datasets respectively. C3-C0
refers to CWRU load condition 3 Hp as source/ train
data and load condition 0 Hp as target/ test data, simi-
larly, P2-P0 is PU dataset condition 2 (1500 RPM, 0.1
Nm and 1000 N) as source/ train data to condition 0
(900 RPM, 0.7 Nm and 1000 N) as target/ test data.
Thus in this study the results of these two tasks will
be discussed.
3.2.2 Model Inputs and Pre-Processing
Frequency-based features have been proven to be
good in modelling the data for domain adaptation and
generalization characteristics (Zhao et al., 2021; Kan-
charla et al., 2022). Following that understanding,
we used frequency transformed data as the model in-
puts. As the considered data is continuous in nature
and assuming each sample window contains at least
one spindle rotation’s information, the selected sam-
ple windows for CWRU and PU data files are chosen
to be 512 and 2048 sample points respectively. Fast
Fourier Transform has been applied on these windows
and absolute values of the positive spectrum are re-
tained. Finally, they are introduced to the appropriate
models as inputs (256 and 1024 for CWRU and PU re-
spectively). Whereas its outputs are 10 class labels of
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
32

CWRU (1 normal and 9 faulty) and 14 class labels of
PU (1 normal and 13 faulty), are also provided to the
model during training and target labels as inputs while
domain adaptation with CNN and RESNET backed
methods. Training and testing data from both source
domain and target domain are split into 80-20. All
the training and retraining happen with the 80 split
data while the testing is done on the 20 split.
3.2.3 Performance Evaluation Metrics
Model efficacy was measured and evaluated based on
the general accuracy, i.e. the amount of correctly pre-
dicted samples out of all samples across conditions.
Whereas, the model computational efficiency was
mostly measured by various parameters like model
size, number of operations performed, and inference
latency. Model size was measured in terms of the
memory consumed by the trainable and non-trainable
parameters involved in model inference. Number
of Floating Point Operations (FLOPs) per inference
were also gathered to understand the computational
complexity of the models. Additionally, per sample
inference latency was measured, i.e, time taken for
inferring each randomly selected sample. Except for
data pre-processing, this latency measure includes all
the steps for per sample feature extraction and classi-
fication. Moreover, for each model evaluated in this
study, these metrics were collected from 3 separate
experiments to eliminate any bias due to randomness.
3.3 Experimental platform
Both model characterization of the selected SOTA
methods and preliminary analysis of the proposed
self adaptive method have been performed on a com-
puter with Intel® i7-8850H CPU running at 2.60GHz,
equipped with 32GB RAM. Please note, as the ex-
perimental platform does not represent a constrained
device, we infer and discuss the computational effi-
ciency of the SOTA models based on the acquired
computing parameters from the experiments. None
of the acquired computational parameters vary across
devices, except for the latency.
4 RESULTS OF MODEL
BENCHMARKING
We first performed an end to end benchmark study
for the various SOTA models upon the experimental
tasks discussed above. As mentioned previously, the
end to end performance study involved analyzing pa-
rameters like model footprint, FLOPs, accuracy and
per sample inference latency. From Table 2, we can
observe that the RESNET backed domain adaptation
models are in general 15-30% more accurate than the
CNN features based models. But there is a large dif-
ference in the FLOPs, model size and the latency of
inference between them. While the aggregate num-
ber of operations performed by CNN based models
are approximately 4.37 M and 18.1 M for both the
cases respectively, for the same tasks the RESNET
model needs to perform approximately 10 times more
FLOPs. On the other hand, latency of RESNET mod-
els is .approximately 4 times to that of CNN mod-
els within the dataset. Inference latency and FLOPs
of similar models are different across the datasets be-
cause of the change in the number of inputs. As dis-
cussed in the previous section, CWRU has 256 inputs
while PU has 1024 inputs, which are 4 times more
compared to CWRU, leading to more computations
performed. Whereas, the trainable parameters and
model size does not change across the tasks as they
are architectural parameters and are independent of
the input size.
As opposed to RESNET and CNN based mod-
els, the single domain generalization model, CAE-NN
is competitively placed in terms of accuracy whilst
having smaller space requirements, lower number
of performed operations and inference latency. It’s
the second best performing model with CWRU task
and better than the CNN models for the PU task.
When compared to CAE-NN, RESNET backed mod-
els are slightly effective at cross domain adaptation,
but CAE-NN is several orders less complex. It is
100 times lower on number of FLOPs and approxi-
mately 10 times low on prediction latency compared
to RESNET models. Overall, even though it is a
single-source domain generalization model, it’s evi-
dent that CAE-NN has the best accuracy over infer-
ence latency and FLOPs ratios out of all the domain
invariant SOTA models.
Summarizing the SOTA domain invariant mod-
els for resource constrained implementation, we
found that the data augmentation based method
showed the least cross-domain generalization capa-
bility. Whereas the labelled target data based domain
adaption of CNN models’ performance is mediocre.
Finally, RESNET backed models are the best per-
forming for the considered tasks and show very high
adaptability to the changing conditions. But this is
at the cost of labelled target data, which is scarce in
practice as discussed in the previous section. The next
best model CAE-NN does this generalization without
any prior knowledge of the feature distribution in the
target domain. Additionally, the number of trainable
parameters that have to be accommodated on a com-
Lightweight and Self Adaptive Model for Domain Invariant Bearing Fault Diagnosis
33

Table 2: Cross conditional bearing fault diagnosis models’ performance and their corresponding computational metrics.
Model Accuracy (%) Latency (ms) FLOPs (Million) Model size (MB) Params (Thousand)
Task: CWRU C3-C0; input size: 256
CAE-NN 92.2 0.2 0.42 0.20 26.61
C-Shadow 69.5 0.5 4.37 0.93 232.90
C-CDAN 82.6 0.6 4.37 0.93 232.90
C-DAN 79.7 0.7 4.37 0.93 232.90
C-MKMMD 74.3 0.6 4.37 0.93 232.90
C-JMMD 79.1 0.6 4.37 0.93 232.90
R-CDAN 93.5 3.0 46.19 15.91 3977.80
R-DAN 89.9 3.0 46.19 15.91 3977.80
R-MKMMD 84.7 3.0 46.19 15.91 3977.80
R-JMMD 83.1 3.0 46.19 15.91 3977.80
Task: PU P2-P0; input size: 1024
CAE-NN 41.8 0.3 1.66 0.80 98.61
C-Shadow 34.6 1.2 18.10 0.93 233.93
C-CDAN 39.2 1.1 18.10 0.93 233.93
C-DAN 39.3 1.0 18.10 0.93 233.93
C-MKMMD 43.2 1.2 18.10 0.93 233.93
C-JMMD 41.0 1.3 18.10 0.93 233.93
R-CDAN 53.6 4.3 184.39 15.91 3978.83
R-DAN 48.1 4.0 184.39 15.91 3978.83
R-MKMMD 58.7 4.0 184.39 15.91 3978.83
R-JMMD 78.2 4.0 184.39 15.91 3978.83
C − /R − Pre f ix denotes backbones used, C : CNN; R : RESNET 18.
putational platform is an unfair comparison between
the RESNET backed models and CAE-NN. Trainable
prameters of RESNET are approximately 20 times
more compared to CNN and more than 40 times com-
pared to CAE-NN.
5 PROPOSED
SELF-ADAPTATION
STRATEGY
Taking advantage of the generalization prowess of
CAE-NN we devised a self adaptive strategy as vrep-
resented in Figure 1. From the benchmark experi-
ments conducted on CAE-NN, there is enough evi-
dence to consider that the source domain (D
s
) and the
target domain (D
t
) share similar feature distribution
or at least have a close proximity in the latent space
L. This is valid for the two tasks considered here that
are very different in their conditions and for the ma-
jority of the 24 cases from both CWRU and PU tasks.
We can observe that a considerate amount of samples
are accurately classified across the domains. Thus,
we propose to use this new found information from
across the domain to retrain the existing CAE-NN.
And the so re-trained CAE-NN will be called SCAE-
NN (Self adapted CAE-NN).
But, taking into account the low computational re-
source availability at the edge, our proposal will con-
sider re-training the classifier alone, KNN in this case.
The proposal involves three simple steps,
• Inferring a new sample.
• Pseudo label the strong predictions.
• Retrain the KNN with pseudo labelled predic-
tions.
In other words, if a sample X
i
t
, an i
th
sample of the
target domain D
t
is predicted with probability above
a threshold, it will be considered a strong prediction.
The latent features of this strong prediction i.e, l
i
t
ac-
quired from the encoder will be pseudo labelled as Y
i
t
.
As a retraining step, this pseudo labelled set of (data,
label {l
i
t
Y
i
t
}) pair will be added to the KNN training
set KNN
s
.
As we are using the KNN with brute force ap-
proach, the retraining phase of the KNN in the pro-
posed SCAE-NN is simply appending the new (data,
label) pair to the existing pairs. This means, the
proposed re-training method of SCAE-NN can be
implemented with a negligible amount of computa-
tional overhead compared to the inference of CAE-
NN. While the KNN re-training can be performed
with the similar cost of inference, its trade-off will
be elaborated in the next section.
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
34

Raw data
Condition X
FFT Scaler
Pre-processing
Feature extraction & classification
Back propogation
Encoder Latent features Decoder
KNN Classifier
Raw data
Condition Y
FFT Scaler
Encoder Latent features
KNN Classifier
Training
Testing
Class probability >0.9
Pseudo label
(data, label) pair
Self-adaptation
Figure 1: Block diagram describing the proposed self-adaptation strategy utilizing the generalizability of CAE-NN and pseudo
labelling.
Probability Threshold
In general, the final prediction of KNN is based on
the maximum number of K closest neighbours in the
feature space. Whereas for the re-learning purpose
we pseudo label only the strong predictions. Strong
predictions here mean the samples that are predicted
with over certain probability threshold. Although the
threshold selection is dynamic and subjective to do-
main adaptation use case, in this article we chose
probability over 0.9 for pseudo labelling a sample.
This in some cases might not produce high rate of
adaptation, but restricts negative learning by consid-
ering only the strong positive predictions.
6 RESULTS
As mentioned in the experimental setup section, all
the performance evaluation metrics for the proposed
SCAE-NN were also acquired from 3 individual ex-
periments for each task and mean values are reported.
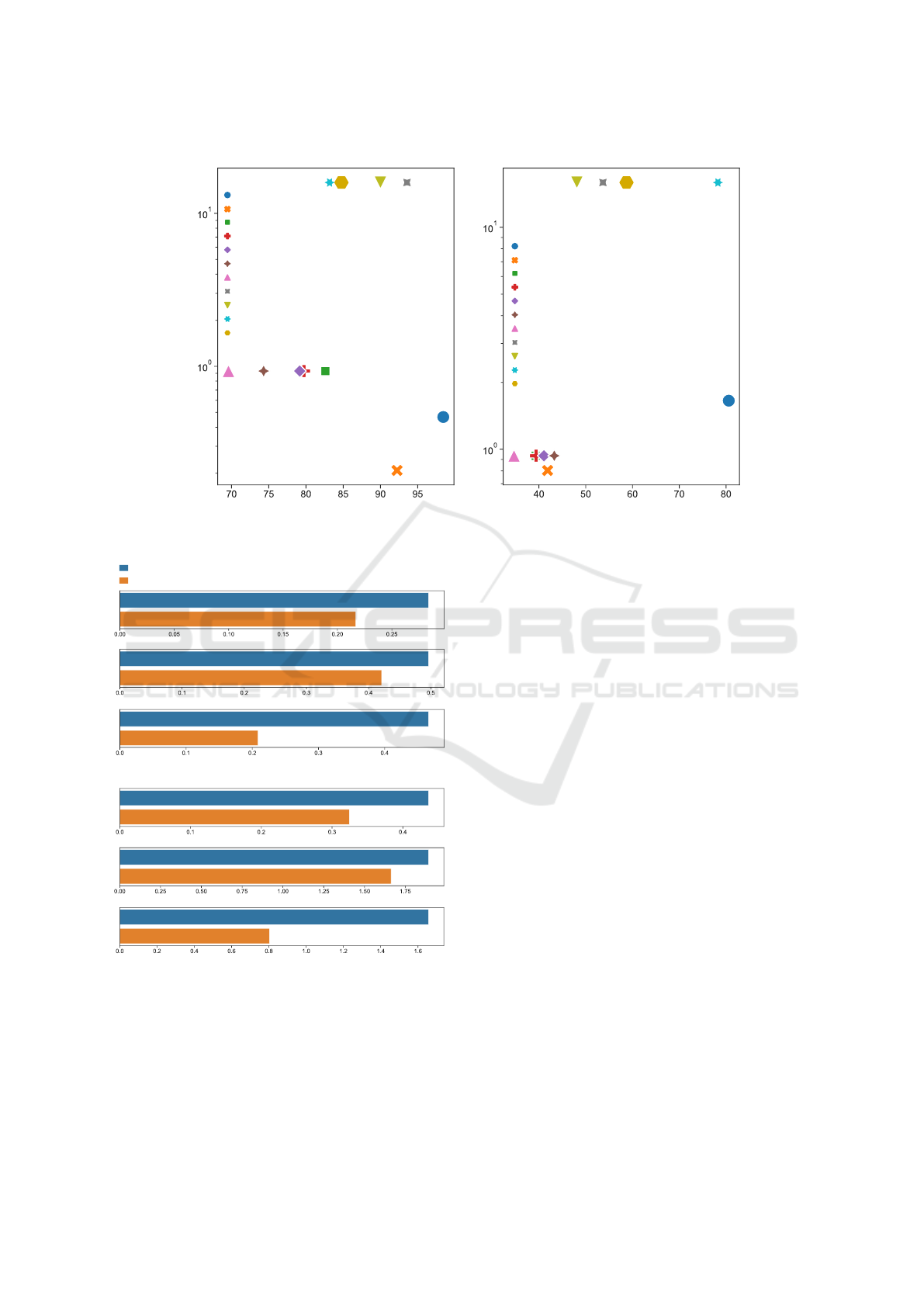
Figure 2 compares the SOTA domain invariant mod-
els discussed in the previous section to the self-
adaptive model proposed in this article SCAE-NN.
Starting with the improvement over CAE-NN, self-
adaptive version is approximately 8-9% more accu-
rate for C3-C0 task and an impressive 35-40% higher
for the P2-P0 task. Empirical results suggest that the
proposed SCAE-NN is capable of adapting to the new
conditions much better than the SOTA domain adap-
tation models. It adapts 6-7% better than best per-
forming RESNET backed models for C3-C0 task and
2-3% for P2-P0. This is a significant improvement
over the SOTA models in terms of accuracy.
Moreover, the model sizes of SCAE-NN com-
pared to the RESNET based models are substantially
low. It is approximately 33.4 and 9.3 times smaller for
(1,256) and (1,1024) respective inputs of the CWRU
and PU tasks. While the model size does not change
with the inputs in the case of RESNET or CNN mod-
els, SCAE-NN’s does vary. As can be seen from
Figure 3, the effect of SCAE-NN retraining is rela-
tively high on the model size, latency of prediction
and floating point operations. This is more drastic in
the case of model size compared to the latency and
FLOPs.
Both the input size and the number of samples
used during training and re-training affect the model
size of SCAE-NN because of the KNN. While KNN
does not fit any function to the data during training,
it searches its feature space during every inference.
KNN evaluates the new data point’s distance from ev-
ery other data point in the training set during infer-
ence. Thus, after the retraining of SCAE-NN, newly
added pseudo samples lead to increased model size
and introduce extra computations during inference.
The increased computational overhead during in-
ference is reflected by the increased Latency and
FLOPs of SCAE-NN. While the average FLOPs
count was 0.41 and 1.62 Million with CAE-NN for
CWRU and PU tasks respectively, with SCAE-NN it
has increased by up to 0.1-0.2 Million for both the
tasks. Also a similar increase on the latency of per
sample inference can be observed. Figure 4 shows pe-
riodic increase in the accuracy and the inference time
Lightweight and Self Adaptive Model for Domain Invariant Bearing Fault Diagnosis
35
Accuracy (%) Accuracy (%)
Model size (MB)
C3-C0 P2-P0
R-CDAN
C-DAN
CAE-NN
C-CDAN
C-JMMD
C-MKMMD
C-Shadow
R-DAN
R-JMMD
R-MKMMD
DA model
SCAE-NN
R-CDAN
C-DAN
CAE-NN
C-CDAN
C-JMMD
C-MKMMD
C-Shadow
R-DAN
R-JMMD
R-MKMMD
DA model
SCAE-NN
Model size (MB)
Figure 2: Comparison of the domain invariant models for their model sizes against the accuracies. With considerably low
model size, SCAE-NN is at par or sometimes better than RESNET based domain adaptation models.
Time (ms)
FLOPs (M)
Model size (MB)
Time (ms)
FLOPs (M)
Model size (MB)
CAE-NN
SCAE-NN
b) PU
a) CWRU
Figure 3: Across CAE-NN and SCAE-NN, we can observe
an exponential increase in the model size compared to the
linear increase in the latency and number of operations.
with changing number of new observations used in
retraining.
From Figure 4, we can see that about 80-90% of
the adaptation is due to the first 40-50% of the new
observations. Particularly, for the PU task this adap-
tation is around 90% by the 40% mark. The accuracy
gain after that point is a trade-off with the increased
model size and latency. Nevertheless, summarizing
the results from Figures 2 and 3, with better accura-
cies, lower number of FLOPs, low latency of infer-
ence and lower model size than the RESNET models,
SCAE-NN is the best choice for any application that
is resource constrained or not.
The adapted fault diagnosis model of CWRU task
is very close to being perfect. Whereas, the PU task
still has some room for fault diagnosis adaptation.
Figure 5 represents the confusion matrix of PU task
after SCAE-NN adaptation, It is clear that all the nor-
mal classes i.e, label number ’13’ from the figure are
predicted correctly. Most of the other faulty classes
are also appropriately classified. Even though the
miss classifications amongst the faulty classes doesn’t
affect the overall fault predictability. The frequently
occurring and note worthy confusion is between class
number 4, KA30, generated by ’plastic deformation:
indentation’ and the normal class. It has to be un-
derstood well to further improve the cross conditional
bearing fault diagnosis performance. The next impor-
tant case that needs further understanding is between
class numbered 6, originally KA24 generate by fa-
tigue pitting and the normal class. While the KA30 is
non severe fault case, the KA24 is a severe one with
faults on both inner race and outer race. While the
general expectations are that these strong fault cases
are classified apart from normal classes, it is unclear
of why these two classes are confused with the nor-
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
36

Observation number
Latency (ms)
Accuracy (%)
a) CWRU
b) PU
Latency (ms)
Accuracy (%)
Observation number
Figure 4: Periodic increase in the accuracy with the new
observation based KNN retraining. We also observe the in-
creasing per sample inference latency due to the increased
KNN samples.
Figure 5: Confusion matrix of PU task after the self adapta-
tion with SCAE-NN.
mal ones. Might be a case of negative learning, and
need to be further investigated.
For the readers interested in the class labels as
mentioned in the original PU dataset paper (Smith
and Randall, 2015), the chronological order of 0-12
classes mentioned in Figure 5 are ’KA04’, ’KA15’,’
KA16’, ’KA22’, ’KA30’, ’KB23’, ’KB24’, ’KB27’,
’KI14’, ’KI16’, ’KI17’, ’KI18’, ’KI21’ and all the six
non faulty classes are label 13.
7 CONCLUSIONS AND FUTURE
WORK
In this article, we first analysed various SOTA mod-
els of bearing fault diagnosis for domain invariance.
This was particularly performed from the perspective
of resource deficient implementation. Different met-
rics concerned with cross conditional fault classifica-
tion performance and implementability were used to
benchmark them. First, from the benchmark study it
is evident that the current models are limited either
based on their performance or computational com-
plexity. Overall, domain adversarial methods and dis-
tribution alignment methods based on RESNET fea-
tures were the best performing. Whereas the same
strategies with features from less complex CNN ar-
chitecture were competitively placed after RESNET
models. Relative to CNN and RESNET based mod-
els, CAE-NN, an Auto-encoder and K-Nearest Neigh-
bors based domain generalization model was compu-
tationally efficient while exhibiting promising cross
fault diagnosis accuracies.
Additionally, a new self adaptation methodology
SCAE-NN based on CAE-NN has been proposed.
Its performance evaluation for cross conditional do-
main adaptation was conducted and the results were
reported. The proposed novel methodology demon-
strated impressive self adaptive nature. While other
performance metrics like inference latency, model
size and FLOPs were relatively high compared to the
non adapted model CAE-NN, the accuracy improve-
ments were at least 8%-40% higher for the evaluated
tasks. What is more impressive is that the SCAE-
NN is self-supervised, whereas the compared models
are supervised. Despite the fact that it is unfair, the
authors chose to compare it to supervised adaptation
models because they are the SOTA for domain invari-
ant fault diagnosis.
Although SCAE-NN is several orders less com-
plex than the next best method, there is a scope to
further improve it in terms of resource utilization effi-
ciency and will the subject of our future work. Ad-
ditionally, future implementation and characteriza-
tion of SCAE-NN will be performed using micro-
controllers, which are the epitome of resource con-
strained edge.
ACKNOWLEDGEMENT
This work is supported by the VLAIO-PROEFTUIN
”Industry 4.0 Machine Upgrading” (Project num-
ber:180493).
Lightweight and Self Adaptive Model for Domain Invariant Bearing Fault Diagnosis
37

REFERENCES
An, Z., Li, S., Wang, J., Xin, Y., and Xu, K. (2019). Gener-
alization of deep neural network for bearing fault di-
agnosis under different working conditions using mul-
tiple kernel method. Neurocomputing, 352:42–53.
Gawde, S., Patil, S., Kumar, S., Kamat, P., Kotecha, K., and
Abraham, A. (2022). Multi-fault diagnosis of indus-
trial rotating machines using data-driven approach: A
review of two decades of research.
Gretton, A., Sriperumbudur, B. K., Sejdinovic, D., Strath-
mann, H., Balakrishnan, S., Pontil, M., and Fukumizu,
K. (2012). Optimal kernel choice for large-scale two-
sample tests. In NIPS.
Kancharla, C. R., Vankeirsbilck, J., Vanoost, D., Boydens,
J., and Hallez, H. (2022). Latent dimensions of auto-
encoder as robust features for inter-conditional bear-
ing fault diagnosis. Applied Sciences, 12(3):965.
Lessmeier, C., Kimotho, J., Zimmer, D., and Sextro, W.
(2016). Condition monitoring of bearing damage in
electromechanical drive systems by using motor cur-
rent signals of electric motors: A benchmark data set
for data-driven classification.
Li, J., Shen, C., Kong, L., Wang, D., Xia, M., and Zhu,
Z. (2022). A new adversarial domain generalization
network based on class boundary feature detection for
bearing fault diagnosis. IEEE Transactions on Instru-
mentation and Measurement, 71:1–9.
Li, X., Hu, Y., Zheng, J., Li, M., and Ma, W. (2021). Cen-
tral moment discrepancy based domain adaptation for
intelligent bearing fault diagnosis. Neurocomputing,
429:12–24.
Liu, C. and Gryllias, K. (2022). Simulation-driven do-
main adaptation for rolling element bearing fault di-
agnosis. IEEE Transactions on Industrial Informatics,
18(9):5760–5770.
Long, M., Zhu, H., Wang, J., and Jordan, M. I. (2016). Deep
transfer learning with joint adaptation networks.
Pan, S. J. and Yang, Q. (2009). A survey on transfer learn-
ing. IEEE Transactions on knowledge and data engi-
neering, 22(10):1345–1359.
Qiu, T., Chi, J., Zhou, X., Ning, Z., Atiquzzaman, M.,
and Wu, D. O. (2020). Edge computing in industrial
internet of things: Architecture, advances and chal-
lenges. IEEE Communications Surveys & Tutorials,
22(4):2462–2488.
Salah, A. A., Dorrell, D. G., and Guo, Y. (2019). A re-
view of the monitoring and damping unbalanced mag-
netic pull in induction machines due to rotor eccen-
tricity. IEEE Transactions on Industry Applications,
55(3):2569–2580.
Shan, N., Xu, X., Bao, X., and Qiu, S. (2022). Fast fault
diagnosis in industrial embedded systems based on
compressed sensing and deep kernel extreme learning
machines. Sensors, 22(11):3997.
Smith, W. A. and Randall, R. B. (2015). Rolling ele-
ment bearing diagnostics using the case western re-
serve university data: A benchmark study. Mechani-
cal Systems and Signal Processing, 64-65:100–131.
Wan, L., Li, Y., Chen, K., Gong, K., and Li, C. (2022).
A novel deep convolution multi-adversarial domain
adaptation model for rolling bearing fault diagnosis.
Measurement, 191:110752.
Wang, X., Han, Y., Leung, V. C. M., Niyato, D., Yan, X.,
and Chen, X. (2020). Convergence of edge computing
and deep learning: A comprehensive survey. IEEE
Communications Surveys & Tutorials, 22(2):869–904.
Wu, Y., Zhao, R., Ma, H., He, Q., Du, S., and Wu, J. (2022).
Adversarial domain adaptation convolutional neural
network for intelligent recognition of bearing faults.
Measurement, 195:111150.
Yang, Y. and Li, C. (2021). Quantitative analysis of
the generalization ability of deep feedforward neural
networks. Journal of Intelligent & Fuzzy Systems,
40(3):4867–4876.
Zhang, Q., Zhao, Z., Zhang, X., Liu, Y., Sun, C., Li, M.,
Wang, S., and Chen, X. (2021). Conditional adversar-
ial domain generalization with a single discriminator
for bearing fault diagnosis. IEEE Transactions on In-
strumentation and Measurement, 70:1–15.
Zhao, C. and Shen, W. (2022). A domain generalization
network combing invariance and specificity towards
real-time intelligent fault diagnosis. Mechanical Sys-
tems and Signal Processing, 173:108990.
Zhao, Z., Li, T., Wu, J., Sun, C., Wang, S., Yan, R., and
Chen, X. (2020). Deep learning algorithms for rotat-
ing machinery intelligent diagnosis: An open source
benchmark study. ISA Transactions.
Zhao, Z., Zhang, Q., Yu, X., Sun, C., Wang, S., Yan, R.,
and Chen, X. (2021). Applications of unsupervised
deep transfer learning to intelligent fault diagnosis: A
survey and comparative study. IEEE Transactions on
Instrumentation and Measurement, 70:1–28.
Zheng, H., Yang, Y., Yin, J., Li, Y., Wang, R., and Xu,
M. (2021). Deep domain generalization combining a
priori diagnosis knowledge toward cross-domain fault
diagnosis of rolling bearing. IEEE Transactions on
Instrumentation and Measurement, 70:1–11.
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
38
