
Instance Segmentation and Detection of Children to Safeguard
Vulnerable Traffic User by Infrastructure
Shiva Agrawal
1 a
, Savankumar Bhanderi
1 b
, Sumit Amanagi
1 c
, Kristina Doycheva
2 d
and Gordon Elger
1,2 e
1
Institute for Innovative Mobility (IIMo), Technische Hochschule Ingolstadt, Germany
2
Fraunhofer IVI, Applied Center Connected Mobility and Infrastructure, Ingolstadt, Germany
Keywords:
Child and Adult Detection, Classification, Intelligent Roadside Infrastructure, Image Segmentation,
Mask-RCNN, Traffic Flow Optimization, Transfer Learning.
Abstract:
Cameras mounted on intelligent roadside infrastructure units and vehicles can detect humans on the road using
state-of-the-art perception algorithms, but these algorithms are presently not trained to distinguish between
human and adult. However, this is a crucial requirement from a safety perspective because a child may not
follow all the traffic rules, particularly while crossing the road. Moreover, a child may stop or may start
playing on the road. In such situations, the separation of a child from an adult is necessary. The work in this
paper targets to solve this problem by applying a transfer-learning-based neural network approach to classify
child and adult separately in camera images. The described work is comprised of image data collection, data
annotation, transfer learning-based model development, and evaluation. For the work, Mask-RCNN (region-
based convolutional neural network) with different backbone architectures and two different baselines are
investigated and the perception precision of the architectures after transfer-learning is compared. The results
reveal that the best performing trained model is able to detect and classify children and adults separately in
different road scenarios with segmentation mask AP (average precision) of 85% and bounding box AP of
92%.
1 INTRODUCTION
Intelligent roadside infrastructure units are usually
comprised of one or more sensors to detect, classify
and predict the motion of various road users. Among
all the sensors, the camera is a very important sen-
sor because it has the unique ability to detect different
colours, shapes, sizes, textures, and types of objects.
Hence, it is widely used to classify various road users
like pedestrians, bicycles, motorbikes, cars, trucks,
buses, animals, static objects, etc. This classification
helps intelligent roadside infrastructure units to de-
cide critical and non-critical situations arising on the
road. For example, if a pedestrian is detected crossing
the road when the traffic lights of the vehicle lane are
a
https://orcid.org/0000-0001-8633-341X
b
https://orcid.org/0000-0001-7257-6736
c
https://orcid.org/0000-0003-0132-8115
d
https://orcid.org/0000-0002-3340-7048
e
https://orcid.org/0000-0002-7643-7327
red, then it is normal condition but if the pedestrian
is detected crossing the road when the traffic lights of
the vehicle lane are green, then this is a critical sit-
uation. In such a condition, an intelligent roadside
infrastructure unit has to immediately send a warning
signal to passing vehicles in order to avoid accidents
and save human lives. Such a situation may not rise
so often when an adult is crossing the road but it is
often possible when a child is crossing the road.
A child may not follow or understand all the traf-
fic rules. Also, a child may cross the road anytime or
may stop or start playing in the middle of the road.
Hence, it is important that intelligent roadside infras-
tructure units are able to detect and classify pedestri-
ans, separately as an adult or a child to increase their
safety on the road and also to avoid accidents. A cam-
era can recognize various road users better than other
sensors, so it is wise to use it to recognize a human
(or pedestrian) as a child or an adult.
The results from traditional computer vision al-
gorithms in this domain are limited but artificial in-
206
Agrawal, S., Bhanderi, S., Amanagi, S., Doycheva, K. and Elger, G.
Instance Segmentation and Detection of Children to Safeguard Vulnerable Traffic User by Infrastructure.
DOI: 10.5220/0011825400003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 206-214
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

(a) Original image. (b) YOLO-v7. (c) SSD.
(d) Faster R-CNN. (e) Mask-RCNN. (f) Retina Net.
Figure 1: Both adults and children are detected as persons in the camera image by different state-of-the-art AI-based detectors.
Figure 1a is taken from open source (Productions, 2021).
telligence (AI) based computer vision algorithms are
very good at detecting and classifying various road
users from camera images. The latest state-of-the-art
algorithms like faster-RCNN (Region-Based Convo-
lutional Neural Network) (Ren et al., 2015), SSD
(Single Shot Detector) (Liu et al., 2016), Mask-
RCNN (He et al., 2017), RetinaNet (Lin et al., 2017b)
and YOLOv7 (You Only Look Once version 7) (Wang
et al., 2022) are widely used for road user classifica-
tion in many research and commercial applications.
But as highlighted in figure 1, none of these state-of-
the-art object detectors is able to separately recognize
whether the detected person is an instance of a child
or an adult.
The work in this paper is focused to solve this
problem by using the transfer learning (Zhuang et al.,
2020) approach. Among the state-of-the-art models,
the Mask-RCNN model is selected for the work be-
cause it has the ability to generate instance segmen-
tation (object mask) along with bounding box and
classification output. The literature survey during the
work concluded that there is no public dataset avail-
able for such a problem. Hence, images from vari-
ous sources containing humans (both child and adult)
are collected and annotated using a semi-automatic
labelling framework. For specific images, manual la-
belling of the data is also performed. Thereafter, the
pre-trained Mask-RCNN network is modified to adapt
it for a two-class object detection and segmentation
task and then trained on the dataset using six differ-
ent feature extraction backbone architectures includ-
ing two different baselines. All the trained models are
evaluated and the best performing model is selected to
use for traffic flow optimization use-case for the intel-
ligent roadside infrastructure (Agrawal et al., 2022).
This paper is outlined as follows: section 2 pro-
vides insights into transfer learning, Mask-RCNN,
and detectron2 framework. Section 3 describes the
approach and method of child and adult detection
and instance segmentation that includes the process
of data collection, data annotation, dataset generation,
AI-based model development, training, and testing.
Section 4 provides the results of the proposed method
and then at last conclusion is given.
2 TECHNICAL BACKGROUND
WITH RELATED WORK
2.1 Transfer Learning
Transfer learning (Zhuang et al., 2020) is the ap-
proach widely used in deep learning applications.
Training of deep learning architectures requires a very
huge amount of labelled data. For every application,
the collection of such a huge amount of data is not
practically possible. With the help of transfer learn-
Instance Segmentation and Detection of Children to Safeguard Vulnerable Traffic User by Infrastructure
207

ing, one can use the pre-trained weights and deep
learning model designed for one application to an-
other similar application with some modifications. In
this approach, the amount of new data required for
training is comparatively low and can provide good
results with high accuracy.
Figure 2 visually describes the concept of transfer
learning. The source model is the original model from
either the same domain or from another domain that
is trained previously using a large amount of labelled
data. The knowledge in form of trained weights and
architecture of this source model is then transferred
and used partially or fully to train another model,
known as the target model. To train this target model,
a comparatively very small amount of labelled data is
required to get high-performance metrics because this
target model is not trained from scratch but is trained
over the available knowledge of the source model.
Figure 2: Overview of transfer learning approach.
Transfer learning is applied successfully in many
fields including medical imaging, aerospace, natural
language processing, audio processing, autonomous
vehicle development, etc. As a result, the avail-
able literature in this area is very vast, and, hence
only some of the work from different fields is cited
here. For example, in (Liang et al., 2016) aerial im-
ages are classified using transfer learning for remote
sensing image understanding tasks. The work stated
in (Cao et al., 2013) used transfer learning for better
and more accurate detection of pedestrians from cam-
era images. The author in (Hu and Yang, 2011) has
used this approach to identify and predict various hu-
man activities. In (Alzubaidi et al., 2020), the author
has used transfer learning to classify images to detect
breast cancer and in (Kocmi and Bojar, 2018) for low-
resource neural network-based machine translation
application. Similarly, the work stated in (G
´
ati and
Kiss, 2021) represents sound signals as images and
then uses transfer learning to classify sounds through
an image classifier as the source model.
2.2 Mask-RCNN
Mask-RCNN (He et al., 2017) is a state-of-the-art
neural network model which is widely used in image-
based object detection and image segmentation appli-
cations. This model consists of a backbone network
that does the work of feature extraction (high level
to low level) from an input image. These extracted
features along with pre-defined anchors are fed into a
region proposal network (RPN) followed by an ROI
(region of interest) alignment block to get fixed-size
proposals. These proposals are then passed through
a series of fully connected layers (FCN) to generate
object class probabilities and bounding box regres-
sion and also passed through a series of CNN lay-
ers to predict the binary mask of each detected object.
The backbone of the Mask-RCNN that is responsible
for feature extraction can be used from multiple state-
of-the-art classifier models. Among them, the most
widely used are different variants of ResNet(residual
network)(He et al., 2016) with FPN (feature pyramid
network)(Lin et al., 2017a).
Mask-RCNN together with transfer learning is
used in many applications. For example, the work de-
scribed in (Zhang et al., 2020) used transfer learning
together with Mask-RCNN to detect damaged vehi-
cles using camera images. Authors in (Do
˘
gru et al.,
2020) used the same combination of Mark-RCNN
with transfer learning to develop a target model with
a small amount of labelled data to detect dents on the
upper body of the aircraft for automatic maintenance.
Similarly, authors in (Shenavarmasouleh et al., 2021)
used this combination in the medical field to detect
lesian in fundus images to address the diabetic retino-
pathic problem.
From this literature survey, it is evident that trans-
fer learning is a very powerful method and it has
significantly generated good results by using many
different deep learning models (as source models)
including Mask-RCNN. Hence, in this paper, this
powerful and proven combination of transfer learn-
ing with Mask-RCNN is used to develop the target
model to classify children and adults as two distinct
classes from camera images for intelligent roadside
infrastructure applications. In addition, no direct re-
lated work found in the literature that has solved this
specific issue which further motivated the proposed
work of this paper.
2.3 Detectron2
Detectron2 (Wu et al., 2019) is a widely used
open-source modular software framework from the
AI group of Facebook. It is implemented in py-
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
208

Figure 3: Proposed method for detection and instance segmentation of a child and an adult.
torch (Paszke et al., 2019), a python library for AI-
based development. It provides easy to use inter-
face and takes low computation time on single or
multiple GPU systems. Detectron2 is the successor
of detectron that was started with the Mask-RCNN
benchmark. Hence, Mask-RCNN is available in the
detectron2 framework, and with this framework, the
process of using Mask-RCNN together with trans-
fer learning is comparatively easy. Hence, in this
work, Mask-RCNN within the detectron2 framework
is used.
3 PROPOSED METHOD
The complete pipeline of the proposed method for
detection and instance segmentation of a person as
a child or an adult is highlighted in figure 3. Vari-
ous images of children and adults in the road envi-
ronment were collected during the image data collec-
tion process. All the collected images were annotated
by a semi-automatic labelling pipeline to generate a
dataset for the work. The resulting dataset was then
split between train and test samples for the training
purpose.
In the transfer learning-based approach, the Mask-
RCNN model is used as the source model that is
pre-trained on COCO (common objects in context)
dataset (Lin et al., 2014). The target model, i.e. the
described model of the work is then selected by freez-
ing all the initial layers of the source model and modi-
fying the classification, bounding box regression, and
mask generation layers for two categories of objects,
i.e. a child and an adult. Then the target model is
trained on a relatively small size dataset of child and
adult images. For each feature detection backbone ar-
chitecture used during the work, the target model is
designed using the corresponding source model in a
similar manner for training and evaluation.
3.1 Data Collection
As stated before, for this work, a comparatively small
dataset is required because of the transfer learning ap-
proach, but none of the publicly available datasets has
labels for a person as an adult or a child. Hence,
for this work, at first, images containing instances
of children and adults were collected from many
open-source websites and publicly available datasets.
Please note that the images from public datasets con-
taining adults and children are available only as a per-
son.
These images were collected in a variety of set-
tings and poses for instances of adults and children
in road environments. With further refinement, a to-
tal of 506 images were selected that were categorized
as images containing instances of only children, im-
ages containing instances of only adults, and images
containing instances of both children and adults.
Instance Segmentation and Detection of Children to Safeguard Vulnerable Traffic User by Infrastructure
209

(a) (b) (c) (d)
(e) (f) (g) (h)
(i) (j) (k) (l)
Figure 4: Semi-automatic labelling framework for data annotation. From (4a source - (Wolf, 2021)) to (4d) is the labelling
process for images having only children. From (4e source - (Han, 2020)) to (4h) is the labelling process for images having
only adults and from (4i source - (Productions, 2021) ) to (4l) is the labelling process for images having both adults and
children.
3.2 Data Annotation
To annotate the collected images, a semi-automatic
labelling framework is developed. This framework is
depicted in figure 4. Please note that the figure 4d, 4h,
and 4l are not the output of the final model, rather they
show the label transfer from person to child or adult
for generating the annotations using semi-automatic
labelling framework.
At first, the state-of-the-art Mask-RCNN model
that is pre-trained on the COCO dataset with 80 differ-
ent classes including persons is used within the detec-
tron2 framework to generate the bounding box, class,
score, and object mask of all the 80 classes. Then only
instances of a person are preserved and the rest are re-
moved. Then depending on the type of image used as
input, the label of the person is transferred as a child
or an adult. For example, as shown in figure 4, images
from 4a to 4d depict this complete semi-automatic la-
belling pipeline for images contains only child (one
or more instances). The original image of figure 4a
is fed into the Mask-RCNN model which results in
figure 4b and then only the instances of person are
kept which is shown in figure 4c. At last, the label
of a person is transferred to the child as shown in fig-
ure 4d. Similarly, the pipeline for images containing
only adults (one or more instances) is shown from fig-
ure 4e to figure 4h.
For the labelling of images containing instances
of both children and adults, the same pipeline is used
to generate labels as a person but then manually each
instance in the image is checked and labels are trans-
ferred as either a child or an adult. Due to this man-
ual intervention, the proposed framework is named
a semi-automatic labelling framework. After gen-
erating the annotations through the aforementioned
methodology, a manual refinement step is performed
to account for the cases where the network might have
failed to detect a person. This was followed by a final
manual validation step and then the annotations were
saved in a COCO format for training purposes.
3.3 Dataset Summary
Figure 5 illustrates the summary of the generated
dataset and its distribution. The entire dataset con-
sists of 506 images, from which 454 are selected as
training samples and 52 are chosen as testing sam-
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
210

(a) Images type distribution. (b) Class distribution.
Figure 5: Dataset sumamry.
Table 1: Configuration Parameters.
Parameter Value Description
base lr 0.01 learning rate for updating the weights
batch size 4 number of images in a batch
freeze at 2 freeze first freeze at layers
gamma 0.1 learning rate decay factor
steps [5000,15000,20000] steps to decay base lr by gamma
optimiser SGD with 0.9 momentum network optimiser
max iters 30000 maximum iterations to train
eval period 500 evaluation every eval peroid iterations
warmup iters 500
number of iterations to increase the
learning rate to base lr
warmup type linear ramp learning rate linearly
checkpoint 500 save weights every checkpoint iterations
train aug
resize shortest edge, brightness
saturation, contrast train time data augmentations
horizontal flip
test aug resize shortest edge, horizontal flip test data augmentations
ples, by keeping a 90% - 10% train-test ratio. Further
figure 5a shows the distribution of test and train sam-
ples for each type of image and figure 5b provides the
instance-wise distribution of training and test data.
3.4 Development of Model
The Mask-RCNN (pre-trained on coco dataset) model
(source model) is imported directly from the Detec-
tron2 models’ catalog and configuration was changed
to generate detection and segmentation outputs for 2
classes to match objects of interest for the work. The
mask branch of the model generates by default the
class-wise mask of spatial dimensions (28,28) that is
incompatible with the size of the input image. Hence,
in a post-processing step, the masks are up-sampled
to match the input image spatial dimensions. Apart
from that, other configurations like anchor labelling,
loss functions, and RPN settings are preserved from
the source model. The hyper-parameters configured
for the training of the models are given in Table 1.
For the target models, the first two stages of the
original backbones are frozen, and only in later lay-
ers, training is carried out for child and adult detection
and segmentation. The learning rate of the models is
changed in steps during the training as highlighted in
Table 1. At first, the learning rate (base
lr) is set to
0.01 which is reduced to 0.001 after 15000 iterations
and then further reduced to 0.0001 after 20000 itera-
tions during the training and for uniform comparison
of results for all the trained models, a constant seed
value of 42 is used.
Instance Segmentation and Detection of Children to Safeguard Vulnerable Traffic User by Infrastructure
211
4 EXPERIMENTS AND RESULTS
Four different backbone architectures including
ResNet50, ResNet101, ResNeXt101 (Xie et al.,
2017), and ResNeXt152 (with cascaded Mask-RCNN
head) were used as a source model during the train-
ing. Further, the ResNet50 and ResNet101 backbones
are used with two different baselines as highlighted in
Table 2. Backbones with baseline 1 are pre-trained
with a standard 3x schedule and 120 COCO epochs,
whereas the backbones with baseline 2 are pre-trained
for a longer schedule of 400 COCO epochs using
copy-paste augmentations as described in (Ghiasi
et al., 2021). As a result, a total of six different back-
bones with two baselines are used in conjunction with
FPN (feature pyramid network) for training and eval-
uation of the child and adult detection problem.
Each variant was trained independently on the ma-
chine with 16 core CPU of 3.4 GHz, 128 GB RAM,
RTX 3090 GPU with 24 GB memory, and AMD
Ryzon 9 5950x processor. Each variant excluding
ResNeXt152 took around 5 hours for training and
ResNeXt152 took around 18 hours for training. Ta-
ble 2 highlights the performance in form of AP (av-
erage precision) of the bounding box and segmenta-
tion mask of all models after training with the same
hyper-parameters as described in section 3.4. Results
clearly show that the trained model with backbone ar-
chitecture of ResNet50 + FPN with baseline 2 has the
highest AP value of 92.43% for bounding box gen-
eration and 85.85% for segmentation mask. Hence,
for this best-performing model, the training and val-
idation loss, and performance metrics for each class
with respect to training iterations are further given in
figure 6.
Table 2: Comparison of results (each backbone is with FPN).
Metric
baselines 1 baselines 2
ResNet50 ResNet101 ResNeXt101 ResNeXt152 Cascade ResNet50 ResNet101
box AP 81.54 84.05 84.10 91.57 92.43 90.62
mask AP 82.20 83.16 84.31 83.95 85.85 84.28
box AP- adult 80.65 83.41 83.26 92.07 92.71 91.98
box AP- child 82.53 84.70 84.92 91.06 92.14 89.27
mask AP-adult 81.50 81.68 82.75 83.00 86.40 85.37
mask AP-child 82.80 85.45 85.87 84.87 85.30 83.19
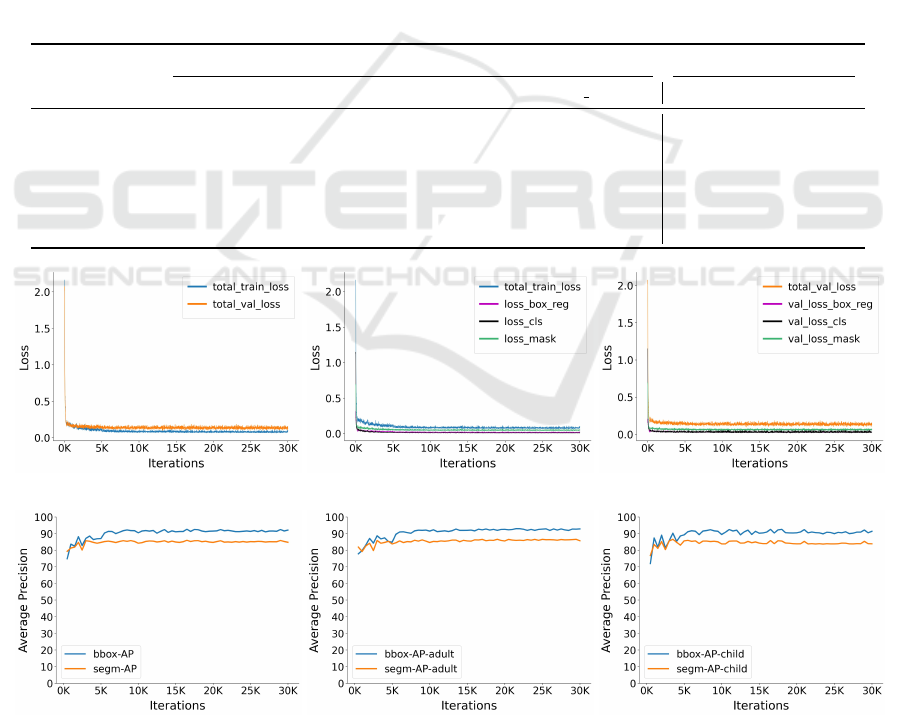
(a) (b) (c)
(d) (e) (f)
Figure 6: Performance and loss graphs of best performing model (Mask-RCNN with baseline 2 ResNet50). The x-axis
represents iterations and the y-axis represents parameters. (6a) compares training loss and validation loss during training.
Further breakdown of training loss and validation loss into sub-categories is shown in (6b) and (6c) respectively. 6d shows
the average precision of the model for box and masks. per-category average precision is shown in (6e) and (6f).
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
212

(a) (b) (c)
(d) (e) (f)
Figure 7: Inference results of the work. All the original images are taken from open source websites, 7a from (Ogino, 2021),
7b from (Khac, 2020), 7c from (Lusina, 2021), 7d from (Kim, 2021), 7e from (Mak, 2021) and 7f from (Cooks, 2022).
Further analysis of the results shows that among
the two models with baseline 2, ResNet50 outper-
forms ResNet101 in terms of all the reported perfor-
mance metrics. These models are pre-trained on a
longer schedule and are therefore capable of capturing
very complex patterns within an image. This explains
the very high AP and low loss of these models from
the beginning as highlighted in figures 6d, 6e and 6f.
However, the increased complexity of the ResNet101
model with baseline 2 is affecting negatively the two-
category problem which results in lower AP as com-
pared to ResNet50 with baseline 2. Additionally,
when comparing variants from baseline 1, then cas-
cade Mask-RCNN with ResNeXt152 backbone pro-
vides the highest AP for the box and the mask.
5 CONCLUSION
In the described work, an instance segmentation and
detection model using an AI-based neural network
is developed to separately classify and detect hu-
mans as a child or an adult. For this purpose,
Mask-RCNN model with different backbone archi-
tectures of ResNet50, ResNet101, ResNeXt101, and
ResNext152 cascade together with FPN including two
different pre-trained baselines are used with trans-
fer learning. From the results, it is found that the
Mask-RCNN model with ResNet50 with baseline 2
(i.e. pre-trained model with 400 epochs) performs the
best with segmentation mask AP (average precision)
of 85% and bounding box AP of 92%.
For further work, the network will be trained by
collecting boundary cases, e.g. small adults and
adults in cower positions, to analyze and improve
the classifier. However, also when the differentia-
tion might not reach 100% the increase of security
for children will be improved by additionally warning
the ongoing traffic that children are present especially
around bus stops, areas in front of schools and cross-
ings where children passing on the school ways using
intelligent roadside infrastructure.
ACKNOWLEDGEMENTS
The research work is supported by the Bavarian Min-
istry of Economic Affairs, Regional Development and
Energy (StMWi) in the project “INFRA – Intelligent
Infrastructure”.
REFERENCES
Agrawal, S., Song, R., Kohli, A., Korb, A., Andre, M.,
Holzinger, E., and Elger, G. (2022). Concept of smart
Instance Segmentation and Detection of Children to Safeguard Vulnerable Traffic User by Infrastructure
213

infrastructure for connected vehicle assist and traffic
flow optimization. In VEHITS, pages 360–367.
Alzubaidi, L., Al-Shamma, O., Fadhel, M. A., Farhan, L.,
Zhang, J., and Duan, Y. (2020). Optimizing the perfor-
mance of breast cancer classification by employing the
same domain transfer learning from hybrid deep con-
volutional neural network model. Electronics, 9(3).
Cao, X., Wang, Z., Yan, P., and Li, X. (2013). Transfer
learning for pedestrian detection. Neurocomputing,
100:51–57. Special issue: Behaviours in video.
Cooks, J. (2022). [Online; accessed September, 2022].
Do
˘
gru, A., Bouarfa, S., Arizar, R., and Aydo
˘
gan, R. (2020).
Using convolutional neural networks to automate
aircraft maintenance visual inspection. Aerospace,
7(12):171.
Ghiasi, G., Cui, Y., Srinivas, A., Qian, R., Lin, T.-Y., Cubuk,
E. D., Le, Q. V., and Zoph, B. (2021). Simple copy-
paste is a strong data augmentation method for in-
stance segmentation. In 2021 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 2917–2927.
G
´
ati, N. and Kiss, A. (2021). Sound classification with
transfer learning (13th joint conference on mathemat-
ics and computer science (the 13th macs), on october
1-3, 2020).
Han, R. (2020). Man walking on pedestrian lane. [Online;
accessed September, 2022].
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Hu, D. H. and Yang, Q. (2011). Transfer learning for
activity recognition via sensor mapping. In Twenty-
second international joint conference on artificial in-
telligence.
Khac, A. (2020). A group of children walking hand in
hand on unpaved road. [Online; accessed September,
2022].
Kim, R. (2021). [Online; accessed September, 2022].
Kocmi, T. and Bojar, O. (2018). Trivial transfer learning
for low-resource neural machine translation. arXiv
preprint arXiv:1809.00357.
Liang, Y., Monteiro, S. T., and Saber, E. S. (2016). Trans-
fer learning for high resolution aerial image classifica-
tion. In 2016 IEEE Applied Imagery Pattern Recogni-
tion Workshop (AIPR), pages 1–8.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017a). Feature pyramid networks
for object detection. In 2017 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 936–944.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017b). Focal loss for dense object detection. In
Proceedings of the IEEE international conference on
computer vision, pages 2980–2988.
Lin, T.-Y., Maire, M., Belongie, S., Bourdev, L., Girshick,
R., Hays, J., Perona, P., Ramanan, D., Zitnick, C. L.,
and Doll
´
ar, P. (2014). Microsoft coco: Common ob-
jects in context.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Lusina, A. (2021). Unrecognizable black father with son
holding hands on city road. [Online; accessed Septem-
ber, 2022].
Mak (2021). [Online; accessed September, 2022].
Ogino, K. (2021). Asian woman and girl standing near
crosswalk. [Online; accessed September, 2022].
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., De-
Vito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., Bai, J., and Chintala, S. (2019).
Pytorch: An imperative style, high-performance deep
learning library. pages 8024–8035.
Productions, P. (2021). Family crossing the street while
holding each other’s hands. [Online; accessed
September, 2022].
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Shenavarmasouleh, F., Mohammadi, F. G., Amini, M. H.,
Taha, T., Rasheed, K., and Arabnia, H. R. (2021).
Drdrv3: Complete lesion detection in fundus images
using mask r-cnn, transfer learning, and lstm. arXiv
preprint arXiv:2108.08095.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2022).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. arXiv preprint
arXiv:2207.02696.
Wolf, K. (2021). Kid and dog crossing the street. [Online;
accessed September, 2022].
Wu, Y., Kirillov, A., Massa, F., Lo, W.-Y.,
and Girshick, R. (2019). Detectron2.
https://github.com/facebookresearch/detectron2.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In 2017 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 5987–
5995.
Zhang, Q., Chang, X., and Bian, S. B. (2020). Vehicle-
damage-detection segmentation algorithm based on
improved mask rcnn. IEEE Access, 8:6997–7004.
Zhuang, F., Qi, Z., Duan, K., Xi, D., Zhu, Y., Zhu, H.,
Xiong, H., and He, Q. (2020). A comprehensive sur-
vey on transfer learning. Proceedings of the IEEE,
109(1):43–76.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
214
