
A Concept for Optimal Warehouse Allocation Using Contextual
Multi-Arm Bandits
Giulia Siciliano
1a
, David Braun
2b
, Korbinian Zöls
1c
and Johannes Fottner
1d
1
Chair of Materials Handling, Material Flow, Logistics, Technical University of Munich, Garching bei München, Germany
2
Institute of Flight System Dynamics, Technical University of Munich, Garching bei München, Germany
Keywords: Artificial Intelligence, Machine Learning, Warehouse Management, Storage Strategies.
Abstract: This paper presents and demonstrates a conceptual approach for applying the Linear Upper Confidence Bound
algorithm, a contextual Multi-arm Bandit agent, for optimal warehouse storage allocation. To minimize the
cost of picking customer orders, an agent is trained to identify optimal storage locations for incoming products
based on information about remaining storage capacity, product type and packaging, turnover frequency, and
product synergy. To facilitate the decision-making of the agent for large-scale warehouses, the action selection
is performed for a low-dimensional, spatially-clustered representation of the warehouse. The capability of the
agent to suggest storage locations for incoming products is demonstrated for an exemplary warehouse with
4,650 storage locations and 30 product types. In the case study considered, the performance of the agent
matches that of a conventional ABC-analysis-based allocation strategy, while outperforming it in regards to
exploiting inter-categorical product synergies.
1 INTRODUCTION
Considering that warehousing constitutes the most
cost-intensive part of modern supply chains (Rushton
et al., 2010), efficient warehouse operation is of
paramount importance to supply chain management.
A large portion of the total warehouse operating costs
usually results from the picking of goods. For
example, in (de Koster et al., 2007) it is estimated that
picking of goods accounts for 55% of the total
warehouse operating costs. To minimize this cost,
various picking strategies were developed. A
discussion of common routing methods is provided in
(Petersen and Aase, 2004). Because the picking costs
of a product are largely determined by its position in
the warehouse, a large portion of the picking costs can
be traced back to the storage allocation of the product
after its arrival in the warehouse. In (Heragu et al.,
2005) a mathematical model and heuristics were
developed to determine the optimal allocation of
products in the different functional areas of a
warehouse, considering also their respective size. To
a
https://orcid.org/0000-0002-8438-9409
b
https://orcid.org/0000-0003-1873-2069
c
https://orcid.org/0000-0002-2998-9890
d
https://orcid.org/0000-0001-6392-0371
solve the problem of optimal allocation in
warehouses, in (Jiao et al., 2018) a multi-population
genetic algorithm is successfully developed and
applied.
To minimize the cost of warehouse operation, we
suggest the application of the Linear Upper
Confidence Bound (LinUCB) algorithm (Li et al.,
2010), a contextual Multi-arm Bandit method, for
optimizing the storage allocation of incoming goods
in large-scale warehouses. Specifically, an Artificial
Intelligence (AI) agent is trained to identify feasible
storage locations for incoming products that, with
regard to the current state of the warehouse and the
characteristics of the item to be stored, minimize the
expected time required to pick future customer
orders.
The remainder of the paper is structured as
follows. Firstly, in Section 2, the proposed AI-based
storage allocation strategy is presented in detail. Its
performance in an exemplary warehouse with 4,650
storage locations and 30 product types is
demonstrated throughout Section 3. Final conclusions
460
Siciliano, G., Braun, D., Zöls, K. and Fottner, J.
A Concept for Optimal Warehouse Allocation Using Contextual Multi-Arm Bandits.
DOI: 10.5220/0011839700003467
In Proceedings of the 25th International Conference on Enterprise Information Systems (ICEIS 2023) - Volume 1, pages 460-467
ISBN: 978-989-758-648-4; ISSN: 2184-4992
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
and suggestions for future research are provided in
Section 4.
2 METHOD
The proposed method addresses the problem of
optimal storage allocation in two stages. In the first
stage, the LinUCB algorithm is applied. Here, to
facilitate the operations of the agent in large-scale
warehouses, the decision-making is performed for a
low-dimensional representation of the warehouse,
obtained by BIRCH clustering (Zhang et al., 1996).
Thus, instead of allocating incoming products to
specific storage locations, the LinUCB agent assigns
incoming products to spatial warehouse clusters.
Subsequently, in the second stage of the decision-
making, a heuristic decision rule is applied to allocate
the incoming product to a specific storage location
within the previously selected spatial cluster.
2.1 Pre-processing: Spatial Clustering
of Warehouse Locations
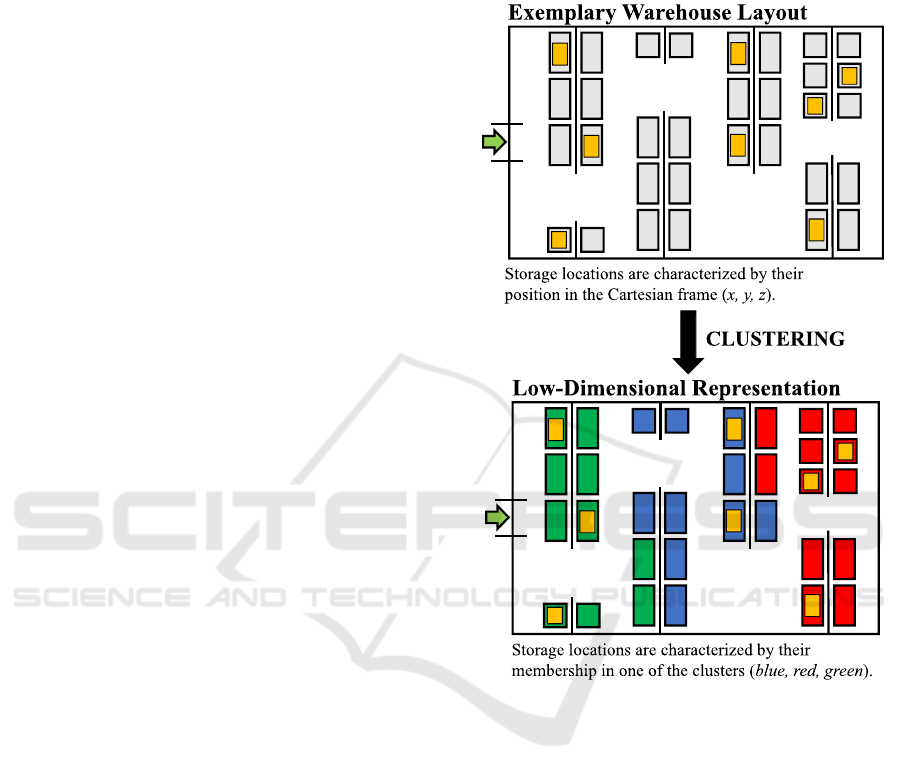
The spatial clustering of the warehouse locations into
spatially similar clusters acts as the pre-processing
stage of the presented AI-based optimal storage
allocation method and, as visualized in Figure 1,
allows the agent to interact with a low-dimensional
representation of the warehouse.
The use of a low-dimensional representation of the
warehouse has two major advantages. Firstly, by
reducing the dimension of the action space, the
decision-making of the agent is simplified. Secondly,
the spatial clustering sets the base for generalizing
storage allocation strategies, that were “learned” for
one particular warehouse layout, to warehouses with
different layouts. This is because of the fact that the
low-dimensional representation of the warehouse, on
which the agent is trained, is largely independent of
the actual layout of the warehouse, i.e., of the
arrangement of the storage locations as well as the
number of entrances and exits.
In this paper, the BIRCH algorithm (Zhang et al.,
1996), an unsupervised hierarchical clustering
method, is used to cluster the 𝑛 storage locations in
the warehouse into 𝑛
≪𝑛 groups of spatially
similar locations, referred to as “spatial clusters”.
Each spatial cluster is composed of storage locations
that have a similar spatial position in the warehouse.
The allocation of a storage location 𝑖 into one of the
spatial clusters is based on its distance 𝑑
to every
other storage location 𝑗 in the warehouse. All
information required for the clustering, i.e., the
pairwise distance between every pair of storage
locations, is stored in the symmetric distance matrix
𝑫∈ℛ
×
.
Figure 1: Process of spatial clustering using the BIRCH
algorithm.
2.2 First Stage: Multi Arm
Bandit-based Allocation to Spatial
Cluster
The first stage of the decision-making addresses the
optimal allocation of the incoming product into one
of the spatial warehouse clusters. For this purpose, the
LinUCB algorithm (Li et al., 2010), a contextual
multi-arm bandit method, is used.
2.2.1 Overview of the Linear Upper
Confidence Bound Algorithm
Multi-arm bandit agents aim at maximizing the
cumulative return obtained from repeated interaction
with an environment. Each interaction constitutes the
A Concept for Optimal Warehouse Allocation Using Contextual Multi-Arm Bandits
461

selection of an action 𝑎 from the set of possible
actions 𝒜, as well as the observation of the resulting
return 𝑟, which results from having chosen action 𝑎.
Contextual multi-arm bandit agents assume that the
return, resulting from selecting an action 𝑎∈𝒜,
depends on state observation 𝑠∈𝒮 available to the
agent at the time of the decision-making. These state
observations are typically referred to as “context”.
The LinUCB algorithm models a linear relation
between the return of an action and the available
context. Thus, the expected payoff of selecting action
𝑎 in iteration 𝑡 is approximated by:
Ε𝑟
,
|𝒔
,
=𝒔
,
𝜽
∗
,
(1
)
where 𝒔
,
∈ℛ
denotes the context relevant to
action 𝑎 and 𝜽
∗
∈ℛ
denotes a set of coefficients
obtained from performing Ridge Regression on a set
of available training data (𝑫
,𝒄
) (Li et al., 2010):
𝜽
∗
=𝑫
𝑫
+𝚰
𝑨
𝑫
𝒄
𝒃
.
(2
)
The LinUCB agent selects the action 𝑎
∗
that
maximizes the sum of the expected payoff Ε𝑟
,
|𝒔
,
and the upper confidence boundary 𝛼
𝒔
,
𝑨
𝒔
,
:
𝑎
∗
= arg max
∈𝒜
𝒔
,
𝜽
∗
+𝛼
𝒔
,
𝑨
𝒔
,
.
(3
)
The hyperparameter 𝛼 controls the width of the
confidence interval and thereby the exploration-
exploitation balance of the agent.
During training, the LinUCB agent learns an
optimal decision policy from repeated interaction
with the environment. In each training iteration 𝑡,
after having selected a particular action 𝑎
, the
information (𝑨
,𝒃
) associated to that particular
action is updated using the return 𝑟
obtained from
selecting action 𝑎
given context 𝒔
,
:
𝑨
←
𝑨
+𝒔
,
𝒔
,
,
(4
)
𝒃
←𝒃
+𝑟
𝒔
,
.
(5
)
2.2.2 Definition of the State and Action
Space
The decision-making of the AI agent crucially
depends on the state observation 𝒔∈𝒮. To allow the
agent to make optimal storage suggestions, the state
space 𝒮 is defined such that all information required
for the decision-making is included. Specifically, this
information is about the current state of the
warehouse and the characteristics of the incoming
good. The state of the warehouse is comprised by 𝑛
cluster states. Each cluster state contains information
about the available storage capacity of the cluster, the
expected distance of the cluster to the warehouse exit,
and the synergy between the incoming product and
the products that are already stored in the cluster. The
product state comprises additional information about
the turnover frequency of the incoming product. For
training, all components of the state observation are
normalized.
Because the decision-making of the LinUCB
agent considers the clustered representation of the
warehouse, the definition of the action space 𝒜 is
comparatively straight-forward. Thus, each action
𝑎∈𝒜 refers to the decision of storing the incoming
product in one of the 𝑛
spatial clusters of the
warehouse. Hence, 𝑎
refers to the decision to store
the product in the first spatial cluster, 𝑎
refers to the
decision to store the product in the second spatial
cluster, and so on.
2.2.3 Definition of the Reward Function
To train the LinUCB agent to suggest storage
locations that increase the warehouse efficiency, the
reward function must be designed such that storage
suggestions, which maximize the future picking
costs, are rewarded. However, in the scope of
warehouse storage allocation, the picking cost that
results from storing an incoming product in the
warehouse only materialize after the product is picked
completely from the warehouse, i.e., significantly
after the decision-making. As a consequence, the
design of the reward function is drastically
complicated.
The picking costs of a product-to-be-stored are in
general obtained only after many iterations. For this
reason, to train our agent, we use an estimation of the
picking costs that is an approximation based on
heuristic information available at the time of the
decision-making.
As shown in Equation (6), the reward function
consists of three components: a turnover frequency
weighted distance component, a product synergy
component, and a storage capacity component.
𝑟=𝑟
+𝑟
+𝑟
.
(6)
The distance component incentivises the agent to
store products with a high turnover frequency in
storage clusters that have a smaller expected distance
to the warehouse exit. Vice versa, products that have
a low turnover frequency should be stored in storage
clusters that have a larger expected distance to the
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
462
warehouse exit. To this end, the distance component
is defined as:
𝑟
= 1−𝑠
̅
Ε
[
𝑑
]
𝑑
,
(7)
where 𝑠
̅
∈[0.1,1] constitutes a scaling factor that is
close to 1 if the product has a comparatively large
turnover frequency and close to 0.1 if the product has
a comparatively small turnover frequency. The
symbol Ε
[
𝑑
]
denotes the expected distance of the
selected warehouse cluster to the warehouse exit. In
this paper, all exits are assumed to be chosen with the
same probability. Finally, 𝑑
denotes a
normalization factor that constitutes the maximum
distance between any pair of storage locations in the
warehouse.
The synergy component of the reward function
rewards the agent for choosing warehouse clusters
that contain product types that synergize with the
product type of the incoming good in terms of the
probability of being combined in customer orders.
The level of synergy between the incoming product
and the products already stored within a particular
cluster is determined using historical data and
continuously updated during training. Therefore, the
method can in principle adapt to changing customer
order behaviour. The outcome of the pair-wise
synergy analysis is the categorization of all products
that are already stored in the cluster into one of 𝑛
synergy levels, where high synergy levels indicate
that a product is often ordered together with the
incoming product. On the other hand, low synergy
levels indicate that a product is rarely ordered in
conjunction with the incoming product type.
Formally, the synergy component of the reward
function is defined as
𝑟
= 𝒘
∙𝒓
.
(8
)
Here, 𝒘
∈ℛ
is a 𝑛
-dimensional, evenly
spaced weighting vector over the interval [0, 1] sorted
in ascending order. The vector 𝒓
∈ℛ
denotes the
ratio of products of each synergy level in the selected
cluster. Hence, the first component of 𝒓
denotes the
ratio of products within the warehouse cluster that are
categorized having the lowest level of synergy to the
incoming product type. The synergy level ratios
stored in 𝒓
are ordered in ascending order. Thus,
when computing the scalar product in Equation (8),
high synergy ratios are multiplied with larger weight
components of the evenly spaced weighting vector
𝒘
. Ultimately, the synergy component rewards the
agent for storing a product in a warehouse cluster that
already contains products that synergize with the
incoming product type.
The third and final component of the reward
function penalizes the agent for selecting clusters
with insufficient storage capacity:
𝑟
=
0, i
f
there is sufficient capacit
y
−2,
_
_
_
else
_
_
_
_
_
_
_
_
_
_
___________________
_
.
(9
)
In this paper, insufficient storage capacity can
occur because of two reasons. Firstly, in case that all
storage locations in a particular cluster are already
occupied or secondly, in case that none of the
available storage locations in a particular cluster are
suitable for the packaging type of the incoming
product. Consequently, this reward component is
responsible for teaching the agent to consider both
physical capacity as well as matching packaging
constraints of warehouse storage locations.
2.3 Second Stage: Heuristic-Based
Allocation to Specific Storage
Position
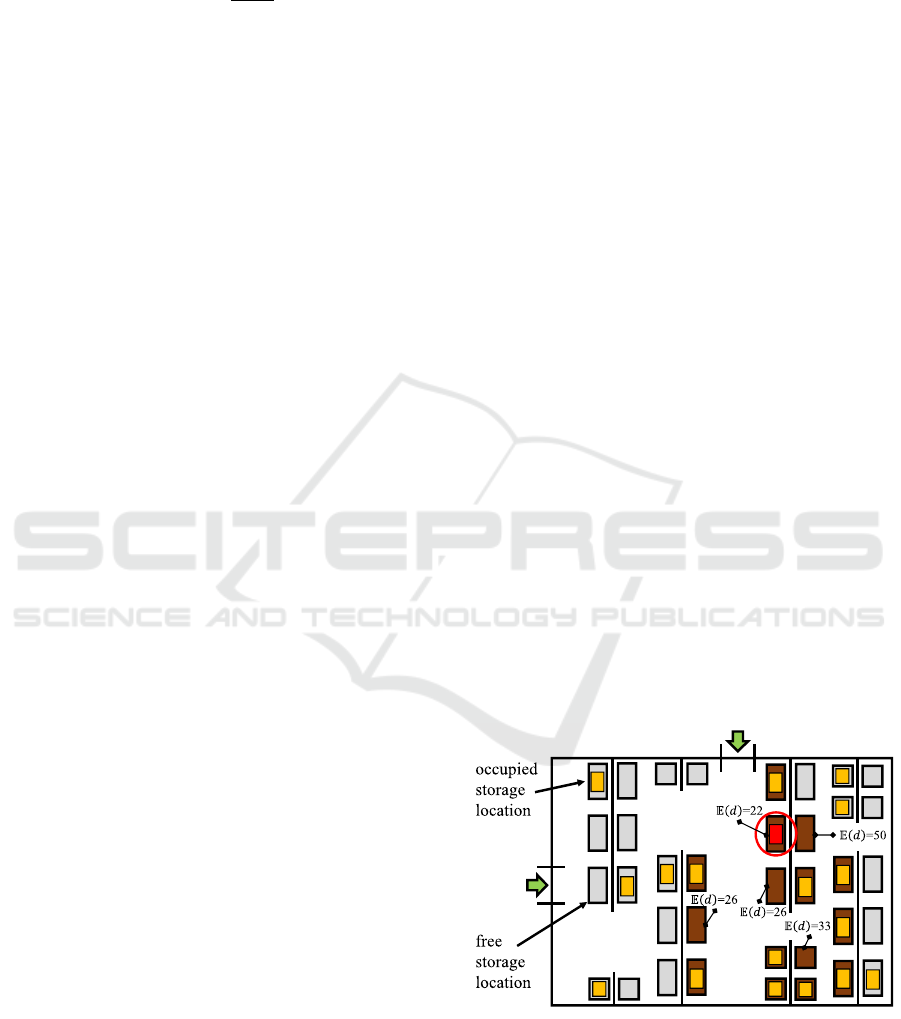
In the second stage of the decision-making, after
having determined a suitable warehouse cluster for
the incoming product in the first stage of the decision-
making, a distance-based decision rule is used to
identify a specific storage location within the target
cluster. Thus, as visualized in Figure 2, the storage
position with the smallest expected distance to the
warehouse exit is selected. In case the action selected
by the agent is infeasible, i.e., in case the desired
warehouse cluster has insufficient storage capacity, a
random available storage location is chosen from the
warehouse.
Figure 2: Representation of the distance-based heuristic
function applied for the allocation of incoming products
(red rectangle) to a specific storage position in the target
spatial cluster.
A Concept for Optimal Warehouse Allocation Using Contextual Multi-Arm Bandits
463
3 CASE STUDY
3.1 Setup
A warehouse comprising a total of 4,650 storage
locations for pallets or small load carriers is consider-
ed. The storage locations are distributed among differ-
ent types of storage systems, that are three pallet racks,
a sliding shelf, a mobile rack, two shelving racks and a
pallet storage. In this case study, 30 different product
types are considered. Synergies among the products are
modelled using six “product clusters”. Each product
cluster contains product types that are more likely to be
part of the same customer order. Customer orders are
generated by a warehouse simulation software, which
first draws the number of products for a certain order
randomly from a set of order sizes 𝑂=
1,2,3,4
.
Then, the types of products part of the order are
selected based on the “order probability” 𝑃
, defined as
the probability to select products from a certain product
cluster. In this case study, 𝑃
is chosen as 69 % for the
second product cluster and as 6 % for the remaining
five product clusters.
For the spatial clustering, the scikit-learn
implementation of the BIRCH algorithm is applied to
the time matrix 𝑫, representing the distance in terms
of travel time intervals between the different storage
locations. The parameter threshold for the BIRCH
algorithm is chosen as 0.2 and 50 clusters are used.
3.2 Result
3.2.1 Turnover Frequency and Product
Synergy
Before discussing the training results of the agent, the
turnover frequency and product synergy of the
different product types are considered. Recalling
Subsection 2.2.2, both metrics are crucial for the
decision-making of the agent and thus continuously
updated for each product using historical data
recorded throughout the training.
For reference, the mean normalized turnover
frequency of each product cluster after 30,000
training iterations is given in Table 1 and validated
against the settings of the simulation.
As expected when considering the order
probability of the clusters, the second product cluster
has the highest turnover frequency. The products in
the remaining product clusters have significantly
lower turnover frequencies. Note that the different
values in the turnover frequency for the remaining
clusters result from each cluster having a different
number of products.
Table 1: Resulting turnover frequencies for each product
cluster.
Product cluster Mean normalized
turnover frequency
1 0.385
2 0.985
3 0.205
4 0.279
5 0.073
6 0.504
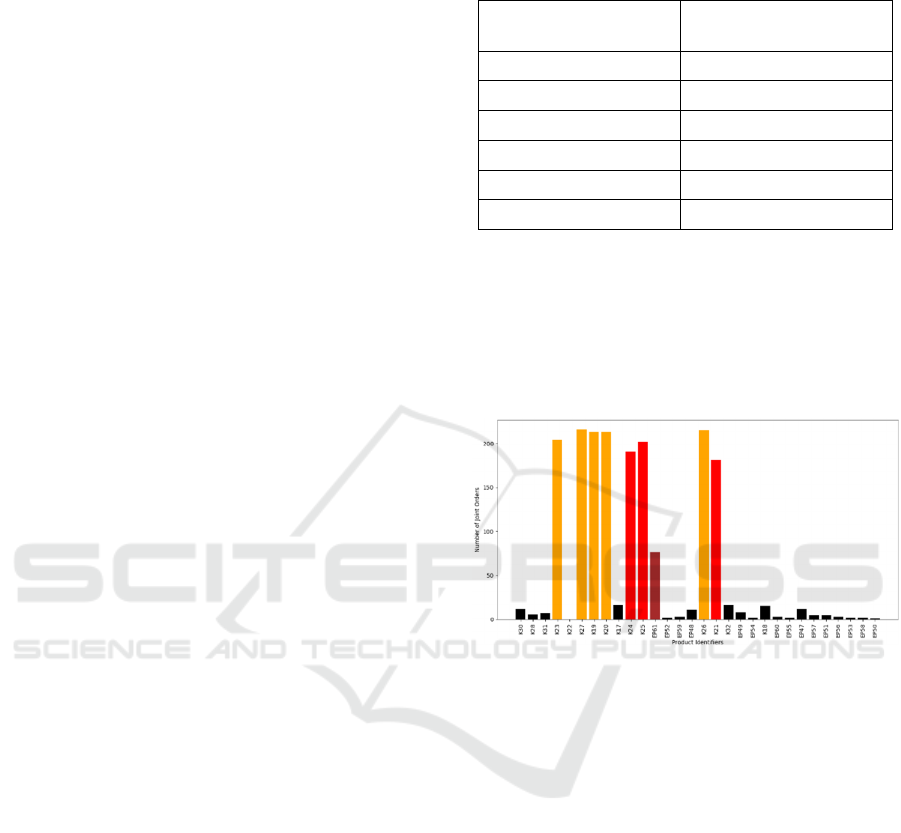
Additionally, the result of the synergy analysis
after 30,000 iterations is demonstrated for the
exemplary product type “K21”. The synergy is
expressed by the number of joint orders of this
product type with any of the remaining 29 product
types. A bar plot representation of the product
synergy is visualized in Figure 3.
Figure 3: Example of order synergy of a product in product
cluster 2. Products of synergy class 0 are displayed in black,
those of synergy class 1 in dark red, those of synergy class
2 in red, and those of synergy class 3 in orange.
Depending on the relative number of joint orders,
each product type is classified into one of four
synergy classes. The synergy classes are visualized in
Figure 3 using colour. Note that the categorization of
each product type may substantially differ depending
on the product type for which the joint synergy is
considered.
3.2.2 Learning Curve
Figure 4 visualizes the performance of the agent
throughout the course of the training. The learning
curve shows a clear increase in the attained reward.
After 𝟏.𝟐𝟎 𝒙
𝟏𝟎
𝟒
training iterations, a mean reward
of 0.85 is reached. Moreover, the infeasibility
percentage, i.e., the ratio with which the agent makes
infeasible storage suggestions, decreases to 0.03 %.
These results demonstrate that the LinUCB agent is
able to identify a storage allocation strategy that
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
464

reaches elevated positive rewards by selecting
feasible storage positions that are optimal in terms of
product synergy, turnover frequency, and the
expected distance to the warehouse exit.
To validate the performance of the LinUCB agent
the learned storage allocation policy is compared to
that of a conventional ABC-analysis-based allocation
strategy. To this end, based on their normalized
turnover frequency, all product types are categorized
as A-, B-, or C-type products. If a product has a
normalized turnover frequency higher than 80 %, the
product is of A-type; if it is between 80 % and 20 %,
the product is of B-type; all other products are C-type.
Additionally, each storage position in the warehouse
is categorized by industry experts as either A-, B-, or
C-type. The ABC-analysis-based allocation strategy
then positions A-type products in A-type spatial
clusters, B-type products in B-type spatial clusters,
and so on. If there are more spatial clusters belonging
to the same type, priority is given to the cluster that
has the smallest expected distance to the warehouse
exit.
In the following, the decision-making of the
LinUCB agent is evaluated using two storage
allocation examples. In both cases, there is about 30
% remaining capacity of the warehouse.
Figure 4: Results of the learning process of the LinUCB
agent over 2.25 𝑥 10
iterations.
3.2.3 An Exemplary Storage Allocation for
an a-Type Product
First, we consider the storage allocation suggestion of
the LinUCB agent for an incoming product of product
type “K20". This product has a normalized turnover
frequency of 0.985 (A-type) and thus constitutes one
of the most frequently ordered product types. The
action valuation of the LinUCB agent for a subset of
the 50 spatial clusters is shown in Figure 5. In the first
column, the normalized expected distance of each
cluster is shown.
Figure 5: Example of the action valuation of the LinUCB
Agent for the A-type product “K20”.
Moreover, information about the remaining
capacity of each cluster is provided in the second
column. Information about the product synergy is
given in the remaining columns. Specifically, each
column gives the percentage of synergy class
products, ordered from synergy class 0 to synergy
class 3 from left to right, that are located in each
cluster.
In this particular example, the agent indicates
cluster 18 as the best allocation target. This decision
is reasonable, given the low expected distance to the
warehouse exit, the sufficient feasibility, and the high
product synergy of “K20” with products already
stored in this spatial cluster, as indicated by the high
product synergy scores.
As the second-best choice, the agent indicates
cluster 10, which has the same expected distance to
the warehouse exit as cluster 18. Note that cluster 10
has a considerably higher product synergy than
cluster 18. However, its remaining storage capacity is
smaller than that of cluster 18, although it would
suffice to store product “K20”. This raises the
question why the LinUCB agent still prefers cluster
18 over cluster 10? The reason for this is that the
agent experienced during training that the selection of
a cluster with zero capacity leads to a negative
reward. It thus learned a linear dependence between
the received reward and the remaining storage
capacity of the selected cluster. Therefore, the
LinUCB agent associates clusters having low
remaining storage capacity with a higher probability
to receive a negative reward.
Cluster 25 constitutes the lowest valued option.
This is once again reasonable, considering that this
cluster has neither sufficient remaining storage
capacity nor existing product synergies.
The conventional ABC-analysis-based allocation
strategy suggests to store product “K20” in cluster 10.
The second and third best choices are clusters 18 and
49. Note that the LinUCB agent considers cluster 49
as the fifth best choice. These results indicate that the
suggestions of the LinUCB agent match those of the
A Concept for Optimal Warehouse Allocation Using Contextual Multi-Arm Bandits
465

conventional allocation strategy. In other words, it
appears that the agent learned a valid storage
allocation strategy.
3.2.4 An Exemplary Storage Allocation for a
B-Type Product
Next, the storage suggestion of the LinUCB agent for
an incoming product of type “K17” with normalized
turnover frequency of 0.385 (B-type) is considered.
The action valuation of the LinUCB agent for a subset
of the 50 spatial clusters is shown in Figure 6.
Figure 6: Example of the action valuation of the LinUCB
Agent for the B-type product “K17”.
The LinUCB agent suggests to store the product
in cluster 18. This is because cluster 18 has a low
expected distance, sufficient capacity, and a high
product synergy. Specifically, 10 % of the products
already stored in cluster 18 are product types that
have the highest synergy level with “K17”.
This time, the suggestion of the conventional
ABC-analysis based allocation strategy differs from
that of the LinUCB agent. The conventional strategy
suggests clusters 38 or 3 as best choices, i.e., two B-
type clusters with low expected distance to the
warehouse exit.
This discrepancy in the decision-making
highlights a main deficiency of the ABC-based
strategy: synergy effects between different ABC-
types of products are not considered. In contrast, the
LinUCB agent suggests to store the B-type product
“K17” in cluster 18, that is a cluster containing a
majority of A-type products. This is because “K17”
synergizes with those A-type products. This
demonstrates that, because of the reward function, the
LinUCB agent is able to consider inter-categorical
product synergy effects in its decision-making
process.
4 CONCLUSIONS
This paper applies a LinUCB agent to identify
optimal storage locations for incoming products in
logistic warehouses. The main contributions are as
follows:
• Demonstration of good learning results for the
LinUCB agent after only 1.20 x 10
training
iterations, reaching an average reward of 0.85
and a percentage of infeasible actions of only
0.03 %.
• The capacity of the LinUCB agent to base its
decision on turnover frequency, expected
distance to the warehouse exit, and product
synergy effects.
• Demonstration that the performance of the
LinUCB agent matches that of a conventional
ABC-analysis based storage allocation
strategy. In contrast to the conventional
method, the agent also considerers inter-
categorical product synergies in the decision
making.
It is to be noted that, the reward function used in
this paper replaces the true picking cost, which – at
the time of the decision-making lies in the future – by
a heuristic metric based on information about product
synergy, travel distance, and available storage
capacity. To minimize the risk of biasing the
decision-making of the agent, future research is
required to design, implement, and test an alternative
reward function – or “delayed” reward – design that
does rely on significantly less heuristic domain
knowledge.
FUNDING
This research has been leaded in the context of the
Zentrales Innovationsprogramm Mittelstand [Central
Innovation Programme for SMEs] (ZIM) project “
SeSoGEN: Entwicklung einer selbstlernenden
Software zur Generierung intelligenter
Einlagerungsstrategien auf Basis neuronaler Netze”.
The Federal Ministry for Economic Affairs and
Energy, based on a decision of the German Bundestag
[Federal Parliament], funded this project.
ACKNOWLEDGEMENTS
We would like to thank Andreas Engelmayer,
Hannelore Mayr, Gertrud Contardo, Markus
Proschmann from the firm CIM GmbH for the fruitful
collaboration. Specifically, CIM GmbH provided the
time matrix 𝑫 , categorized the storage locations
according to the conventional ABC-analysis, and
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
466

used the software PROLAG World to simulate
incoming products, warehouse state and customer
orders.
The authors wish it to be known that, in their
opinion, the first two authors should be regarded as
joint first authors.
REFERENCES
De Koster, R., Le-Duc, T., Roodbergen, K. J. (2007).
Design and control of warehouse order picking: A
literature review. In European Journal of Operations
Research 182.2, pp. 481-501.
Heragu, S. S., Du, L., Mantel, R. J., Schuur, P. C. (2005)
Mathematical model for warehouse design and product
allocation. In International Journal of Production
Research 43:2, pp. 327−338.
Jiao, Y., Xing, X., Zhang, P., Xu, L., Liu, X−R. (2018).
Multi−objective storage location allocation
optimization and simulation analysis of automated
warehouse based on multi−population genetic
algorithm. In Concurrent Engineering Research and
Applications 26:4, pp. 367−377.
Li, L., Chu, W., Langford, J., Schapire, R. E. (2010). A
contextual-bandit approach to personalized news article
recommendation. In Proceedings of the 19
th
international conference on World wide web – WWW
’10. ACM Press.
Petersen, C. G., Aase, G. (2004). A comparison of picking,
storage and routing policies in manual order picking. In
International Journal of Production Economics 92.1,
pp. 11-19.
Rushton, A., Croucher, P., Baker, P., Transport, C. (2010).
The Handbook of Logistics and Distribution
Management. Kogan Page.
Zhang, T., Ramakrishnan, R., Livny, M. (1996). BIRCH:
An Efficient Data Clustering Method for Very Large
Databases. In SIGMOD Rec. 25.2, pp-103-114.
A Concept for Optimal Warehouse Allocation Using Contextual Multi-Arm Bandits
467
