
A Carbon-Neutral, Community-Based, Reactive and Scalable
Ride-Sharing Service
Avinash Nagarajan
1 a
, Alan McGibney
2 b
, Pio Fenton
3 c
and Ignacio Casti
˜
neiras
1 d
1
Department of Computer Science, Munster Technological University, Cork, Ireland
2
NIMBUS Centre, Munster Technological University, Cork, Ireland
3
Teaching & Learning Unit, Munster Technological University, Cork, Ireland
Keywords:
Ride-Sharing, Smart Energy Communities, Green Computing, Optimisation.
Abstract:
This paper presents the design, implementation and evaluation of a community-based, reactive ride-sharing
service that promotes carbon-neutral management of city commutes using autonomous vehicles. The problem
is formulated as a variant of the classical Dynamic Vehicle Routing problem with Time Windows, considering
both dynamic resources and requests over a simulated time horizon. A solution approach is provided, based
on an algorithm following a reactive-based simulation on top of a greedy decision-making process. A pa-
rameterised instance generator is developed to align existing benchmarks (i.e. Google HashCode) and public
datasets (i.e. NYC taxis) to the proposed problem formulation and to enable testing of the solution under
various configurations. The ride-sharing service is proven to scale well, when applied to very large instances,
it provides fast and competitive results, both in terms of trip petitions satisfied and overall distance traversed.
1 INTRODUCTION
The European Green Deal has set the vision for a
climate neutral continent by 2050 (EU Green Deal,
2020). For transportation systems to meet the afore-
mentioned goal, a sustained transition to mass electric
vehicles (EV) and a fully Renewable Energy Sources
(RES)-based energy market to power them is critical
(Xiang et al., 2016). There is an onus on all citi-
zens to play a role in this green transition, for exam-
ple Smart Energy Communities (SEC) are emerging
to enable distributed energy generation and storage at
a local level, representing a step further to the reali-
sation of the term ‘Energy Citizen’ (Diamantoulakis
et al., 2015).
Ride-sharing has presented new opportunities for
the SEC sector to be productive with energy usage
(Agatz et al., 2012). Dynamic ride-sharing systems
aim to match riders and drivers with similar itineraries
and time schedules on short-notice (Furuhata et al.,
2013). These systems can reduce the number of
cars used for personal travel (improving the utilisa-
a
https://orcid.org/0000-0002-4533-0527
b
https://orcid.org/0000-0002-0665-2005
c
https://orcid.org/0000-0002-1673-9737
d
https://orcid.org/0000-0002-3875-4460
tion of available seat capacity) as well as the total
distance for such travels, thus reducing the environ-
mental impact. The research presented in this pa-
per includes the design, implementation and evalu-
ation of a ride-sharing service operating in a Smart
City environment to align with the ambition of the
EU Green Deal goals, and therefore envisioning an al-
ternative carbon-neutral, community-based, reactive
transportation approach for managing city commutes
using autonomous vehicles. Emphasis is placed on in-
dividual citizens (rather than on haulage/commercial
transportation) that collectively aim to minimise their
impact on the environment through the use of ride-
sharing commutes relying on 100% EVs operating
solely on RES.
Specifically, the paper includes the following con-
tributions:
• The formulation of a ride-sharing simulation ser-
vice with the aforementioned conditions, pre-
sented as a variant of the classical Dynamic Ve-
hicle Routing Problem with Time Windows (Jail-
let and Wagner, 2008). The dynamic resources
are provided by a number of SECs spread across
a city, each of them owning a number of au-
tonomous EVs and using its own RES generation
function to dynamically charge (and release) them
28
Nagarajan, A., McGibney, A., Fenton, P. and Castiñeiras, I.
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service.
DOI: 10.5220/0011842500003491
In Proceedings of the 12th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2023), pages 28-39
ISBN: 978-989-758-651-4; ISSN: 2184-4968
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

over time. The dynamic requests are provided
via trip petitions released over time, each of them
with its own location and pick-up/drop-off times.
The formulation of the ride-sharing service inte-
grates energy generation, allocation and reactive
re-routing constraints, with the objective function
of maximising the overall number of trip petitions
being served.
• The design and implementation of a ride-sharing
service, based on an algorithm following a
reactive-based simulation approach on top of a
greedy-based decision-making process. The al-
gorithm favours scalability over optimality, there-
fore evaluating its applicability to real-world in-
stances based on the transportation of large cities.
• The evaluation of the solution approach us-
ing a parameterised instance generator, allow-
ing for the fine-grained customisation of a Vehi-
cle Routing Problem benchmark and of a pub-
lic transportation-based dataset to the specific re-
quirements and format of the ride-sharing prob-
lem. A problem-specific benchmark is generated,
testing the performance and scalability of the al-
gorithm over a number of configurations.
The structure of the paper is as follows: Sec-
tion 2 positions the paper w.r.t. existing ride-sharing
approaches and solutions. Section 3 formalises the
problem for the carbon-neutral, community-based re-
active ride-sharing service being proposed, Section 4
presents the solution approach and Section 5 its eval-
uation. Finally, Section 6 provides the main conclu-
sions and future work.
2 RELATED WORK
In (Hasan et al., 2018) the authors argue the viabil-
ity of a ride-sharing service is dependent on six core
principles: spatial and temporal proximity of the rid-
ers, low coordination costs, guaranteed to ride back
home, low trust concerns and clear commuter roles.
Spatial and temporal proximity reduces per-trip costs
by matching customers with similar schedules and
locations. The other four principles come down to
psychological factors that make the service reliable.
Their approach focuses on one of the passengers own-
ing the vehicle, and therefore is explicitly attached to
the trips of the vehicle like taxis. The optimisation
criteria centres around maximising the incentives of
key stakeholders.
The authors in (Agatz et al., 2012) focus on dy-
namic ride-sharing from the point of view of its shar-
ing cost mechanism. Uncertainty in trip petitions
is considered, with trip applications ranging from a
few minutes to a few hours before departure time.
The algorithm then evaluates different re-optimisation
frequencies for finding ride-share arrangements each
time a new trip petition arrives or at fixed time inter-
vals. Drivers are considered private entities, thus en-
abling vehicle availability only when aligned to their
trip needs. The ride-sharing service focuses on op-
timising the total distance or the total travel time of
each individual ride.
In (Hasan and Hentenryck, 2020) the authors fo-
cus on dynamic ride-sharing from the point of view of
enabling the scheduling of ride-sharing trips in real-
time. Their approach reuses the idea of re-assessment
over a time horizon for matching trip petitions re-
quested just a few minutes before its departure. Al-
though the authors focus on clustering drivers and
passengers of the same neighbourhood together (to
provide a set of possible feasible trips), it is intended
to address the return trip of a population for which an
outbound trip has already been provided. The optimi-
sation criteria is the quality of service where once a
passenger has been assigned to a trip session, they are
guaranteed a ride back.
In (Serra et al., 2019) the authors focus on dy-
namic ride-sharing for the last-mile from the point of
view of integrating it as part of a multi-modal trans-
portation system. The paper considers the routing of
passengers who have nearly completed their commute
after having reached a central station by using pub-
lic transport and are now in a position of scattering
to their final destination points. The goal is to reduce
the number of vehicles on road by efficient passenger-
vehicle allocation.
The authors of (Al-Abbasi et al., 2019) focus on
ride-sharing from the point of view of trust and pri-
vacy. They propose a co-util framework based on
Game Theory, which requires all involved parties to
benefit by being an active part of the solution. In the
proposed ride-sharing service, the passengers benefit
from low travel costs. The goal is to reduce the num-
ber of vehicles on the road and the cost of mitigating
traffic congestion.
The study of community-based reactive ride-
sharing systems has shown significant potential in
mitigating the impact of conventional transportation
on the environment and promoting the use of RES.
The key factor contributing to this potential is the
scalability, robustness and uncertainty of such sys-
tems. By leveraging the power of autonomous electric
vehicles, community-based reactive ride-sharing sys-
tems can be tailored to meet the diverse and evolving
transportation needs of modern society while reduc-
ing their carbon footprint.
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service
29

3 PROBLEM DEFINITION
This section formalises the problem for a carbon-
neutral, community-based reactive ride-sharing ser-
vice as a variant of the classical Dynamic Vehicle
Routing Problem with time windows. It integrates
energy generation, allocation and reactive re-routing
constraints as both the trip petitions and the number
of available vehicles evolve during a simulated time
horizon. The ride-sharing service aims to maximise
the number of trip petitions being served. It is also
intended to be highly scalable to facilitate transporta-
tion in large cities.
The ride-sharing service contains the following
features:
• The grid dimensions of the city c
r
, c
c
and the time
horizon for the simulation th. W.l.o.g., Manhat-
tan distances among the locations of the city are
assumed.
(c
r
, c
c
,th)
• A set S of SECs, each of them with an id s
id
, a
location in the city s
x
, s
y
, a lexicographic-ordered
list of the vehicles belonging to it s
E
, the amount
of vehicles ready at the start of the simulation
(i.e., at time unit 0) s
R
and an energy function
f s
id
: NxN with the energy produced per time
unit of the simulation, which will be used to re-
lease(in order) each new vehicle from s
E
as soon
as enough energy to fill its battery capacity is gen-
erated.
(s
id
, s
x
, s
y
, s
E
, s
R
, f s
id
)∀s ∈ S
• A set E of EVs, each of them with its own id e
id
,
the id of the SEC it belongs to s
id
, its release time
during the simulation e
rt
(either 0 or when enough
energy is generated) and its battery and passenger
capacities (e
bc
and e
pc
). A mapping from E to S
is assumed, such that each e
id
belongs to one s
id
.
(s
id
, e
id
, e
rt
, e
bc
, e
pc
)∀e ∈ Es
• A set T of trip petitions (TPs), each of them with
its id t
id
, its release time during the simulation t
rt
and its pick-up (resp. drop-off) locations t
px
, t
py
(resp. t
dx
, t
dy
) and time-windows t
ep
, t
l p
(resp. t
ed
,
t
ld
).
(t
id
,t
rt
,t
px
,t
py
,t
ep
,t
l p
,t
dx
,t
dy
,t
ed
,t
ld
)∀t ∈ T
The ride-sharing service is intended to provide an
output containing the following features:
• A set Alloc, representing an allocation mapping
from T to E.
∀t ∈ T Alloc[t
id
] =
(
e
id
, if t
id
is allocated to e
id
−1, otherwise
• A set Sched, representing a scheduling mapping
from E to its sequence of movements (in chrono-
logical order) over the entire time horizon.
∀e ∈ E Sched[e
id
] = (m
0
, m
1
, . . . , m
n−1
)
Each movement m
i
of a vehicle is represented as
m
i
≡ {(TA
i
, T B,
i
AX
i
, AY
i
, BX
i
, BY
i
, PS
i
,
PE
i
, ES
i
, EE
i
, T L
i
, LW
i
, T D
i
)}
with:
– TA
i
(resp. T B
i
) represent the start time (resp.
end time) of m
i
.
– AX
i
and AY
i
(resp. BX
i
and BY
i
) represent the
coordinates of the vehicle at the start (resp.
end) of m
i
.
– PS
i
(resp. PE
i
) represents the number of pas-
sengers in the vehicle at the start time (resp. end
time) of m
i
.
– ES
i
(resp. EE
i
) represents the battery left in the
vehicle at the start time (resp. end time) of m
i
.
– T l
i
represents a label to identify the purpose of
the trip.
*
A movement for picking-up (resp. dropping
off) the passenger of t
id
is marked as +t
id
(resp. −t
id
).
*
An idle movement (resting at a given location)
is marked as idle.
*
A last movement, returning to its home SEC
is marked as ret.
– LW
i
represents the leeway of the movement,
i.e., the maximum delay that could be applied
to the movement while still accomplishing the
action is intended to.
– T D
i
represents the movement duration.
3.1 Instance Example
To highlight the approach taken, an example of a
problem instance is presented here. A possible in-
stance represents a city of dimensions 3 x 4 (w.l.o.g,
3km x 4km) and a simulated time horizon of 10 units
(w.l.o.g., 10 minutes).
(c
r
= 3, c
c
= 4,th = 10)
The city contains just 1 SEC, with id SEC
1
and
placed at location (1,2), with a list of 2 vehicles
S
E
≡ [EV
1
, EV
2
], one vehicle ready to go at the start
of the simulation, and a constant energy generation
function of 2kWh per time unit f SEC
1
= 2.
S ≡ {(SEC
1
, 1, 2, [EV
1
, EV
2
], 1, f SEC
1
)}
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
30
A constant speed is assumed, making each vehicle to
traverse 1 block of the city every time unit, while con-
suming 1 unit of its battery capacity (w.l.o.g., 60km/h
constant speed and 60kWh constant consumption).
Both EVs have a battery capacity of 10kWh and room
for 5 passengers. Whereas EV
1
is released at the start
of the simulation (time unit 0), EV
2
is released when
its battery capacity is generated by SEC
1
(i.e., given
the constant energy generation of 2kWh per time unit,
the vehicle is generated at time unit 5). If SE C
1
had
had more vehicles in S
E
, they would have been re-
leased (in order) at time units 10, 15, and so on.
E ≡ {(SEC
1
, EV
1
, 0, 10, 5), (SEC
1
, EV
2
, 5, 10, 5)}
The city receives 3 TPs, with ids T P
1
, T P
2
and TV
3
.
T P
1
is announced at time unit 0, to pick-up the pas-
senger at location (2,3) between time units 0 and 4,
and to drop-off at location (0,0) between time units 5
and 7. T P
2
is announced at time unit 2, to pick-up the
passenger at location (2,2) between time units 3 and
4, and to drop-off at location (1,1) between time units
5 and 6. T P
3
is announced at time unit 6, to pick-up
the passenger at location (2,3) between time units 6
and 7, and to drop-off at location (1,3) between time
units 7 and 9.
T ≡ {(T P
1
, (0, 2, 3, 0, 0, 0, 4, 5, 7)),
(T P
2
, (2, 2, 1, 1, 1, 3, 4, 5, 6)),
(T P
3
, (6, 2, 3, 1, 3, 6, 7, 7, 9))}
A feasible solution to this instance allocates T P
1
and
T P
2
to EV
1
, while T P
3
is not allocated.
Alloc ≡ {(T P
1
, EV
1
), (T P
2
, EV
1
), (T P
3
, −1)}
In the allocation above, the vehicles have the fol-
lowing schedules:
Sched ≡ {(EV
1
, [(0, 2, 1, 2, 2, 3, 0, 1, 10, 8, +T P
1
, 2, 2),
(2, 4, 2, 3, 2, 1, 1, 2, 8, 6, +T P
2
, 0, 2),
(4, 5, 2, 1, 1, 1, 2, 1, 6, 5, −T P
2
, 1, 1),
(5, 7, 1, 1, 0, 0, 1, 0, 5, 3, −T P
1
, 0, 2),
(7, 10, 0, 0, 1, 2, 0, 0, 3, 0, ret, 0, 3)]),
(EV
2
, [(5, 10, 1, 2, 1, 2, 0, 0, 10, 10, idle, 5, 0)]}
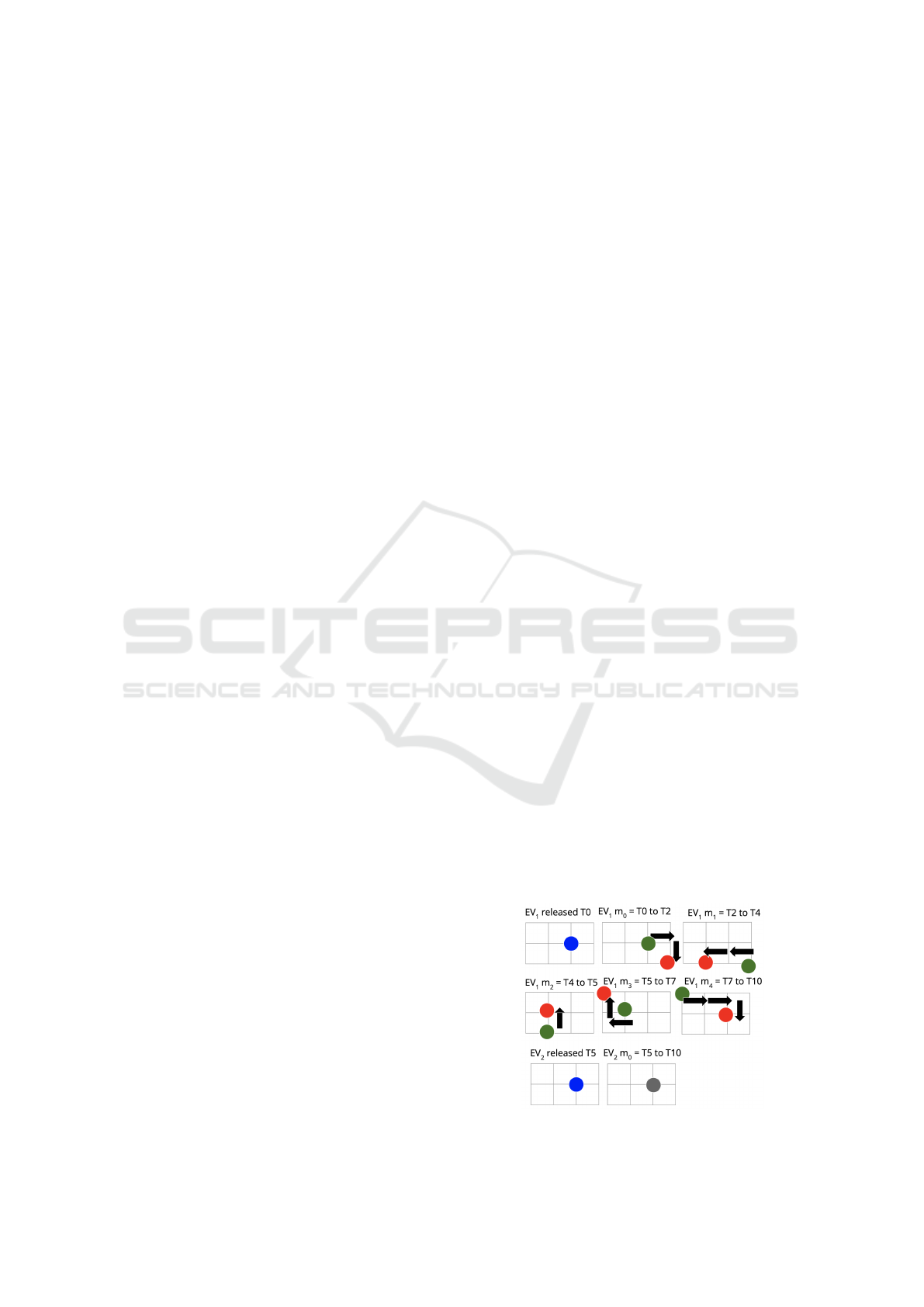
Figure 1 displays the route of EV
1
and EV
2
in
Sched. W.l.o.g., the coverage of the Manhattan dis-
tance between two points is assumed to be traversed
always by covering first the distance of the x-axis fol-
lowed up by the distance in the y-axis. The release of
an EV is highlighted in blue, an idle movement in grey
and an active movement by its starting point (green)
and destination one (red).
The route of EV
1
is composed of 5 movements:
1. From time unit 0 to time unit 2, it leaves the SEC
1
to serve the pick-up of T P
1
. On doing so, it goes
from (1,2) to (2,3), increases its number of pas-
sengers from 0 to 1, and reduces its battery capac-
ity from 10 to 8. As the pick-up of T P
1
must be
within time units 0 and 4 and EV
1
arrives at time
unit 2, a leeway of 2 time units is associated to the
movement, as it could have been re-scheduled by
delaying it up to 2 time units in case the vehicle
had needed any re-routing.
2. From time unit 2 to time unit 4, the vehicle serves
the pick-up of T P
2
. On doing so, it goes from
(2,3) to (2,1), increases its number of passengers
from 1 to 2, and reduces its battery capacity from
8 to 6. As the pick-up of T P
2
must be within time
units 3 and 4 and EV
1
arrives at time unit 4, a lee-
way of 0 time units is associated to the movement,
as it cannot be further delayed by any re-routing.
3. From time unit 4 to time unit 5, the vehicle serves
the drop-off of T P
2
. On doing so, it goes from
(2,1) to (1,1), decreases its number of passengers
from 2 to 1, and reduces its battery capacity from
6 to 5. As the drop-off of T P
2
must be within time
units 5 and 6 and EV
1
arrives at time unit 5, a lee-
way of 1 time unit is associated to the movement.
4. From time unit 5 to time unit 7, the vehicle serves
the drop-off of T P
1
. On doing so, it goes from
(1,1) to (0,0), decreases its number of passengers
from 1 to 0, and reduces its battery capacity from
5 to 3. As the drop-off of T P
1
must be within
time units 5 and 7 and EV
1
arrives at time unit
7, a leeway of 0 time units is associated to the
movement.
5. From time unit 7 to time unit 10, the vehicle re-
turns to SEC
1
before the end of the simulation.
On doing so, it goes from (0,0) to (1,2), stays at 0
passengers, and reduces its battery capacity from
3 to 0. As the end of the time horizon is at time
unit 10, and the vehicle arrives to SEC
1
at time
unit 10, a leeway of 0 time units is associated to
the movement.
Figure 1: S ched Outputted as Solution.
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service
31

The route of EV
2
is composed of just 1 movement,
as the vehicle remains idle since it is released at time
unit 5 until the end of the time horizon.
4 SOLUTION APPROACH
This section presents an initial algorithm to solve the
problem formalised in Section 3. Subsections 4.1 and
4.2 present the algorithm and analyse its complexity,
respectively.
4.1 Algorithm Overview
Given a valid instance of a city with its SECs, vehi-
cles, energy generation and trip petitions, the algo-
rithm aims to maximise the number of trip petitions
being served, outputting both the allocation of each
trip to a vehicle and the routing of each vehicle over
the entire simulated time horizon. For doing so, the
algorithm implements a reactive-based simulation ap-
proach on top of a greedy decision making process for
trip allocations. Algorithm 1 presents the pseudocode
of the solution approach, which is explained in detail
next.
Algorithm 1: Ride-Sharing.
function allocate(e, t, Alloc[t], Sched[e])
is allocated ← f alse
m ≡ [m
0
, . . . , m
k−1
] ← copy(Sched[e])
for i ∈ 0, . . . , k − 1 do
if pick up(m, t, i) then
m ← [m
0
, . . . , m
′
i
, m
′
i+1
, . . . , m
′
r−1
]
for j ∈ i + 1, . . . , r − 1
′
do
if drop o f f (m, t, j) then
m ← [m
0
, . . . , m
′′
j
, m
′′
j+1
, . . . , m
′′
w−1
]
if ret sec(m, w − 1) then
m ← [m
0
, . . . , m
′′
w−1
, m
′′
w
]
(Alloc[t], Sched[e]) ← (e, m)
is allocated ← true
Break
Break
return is allocated
function reactive simulation(S, E, T , th)
(Alloc, S ched) ← init(S, E, T,th)
for t ∈ sorted(T ) do
for e ∈ E do
if allocate(e, t, Alloc[t], Sched[e]) then
Break
return (Alloc, Sched)
4.1.1 Reactive-Based Simulation
First, the algorithm initialises Alloc, considering each
trip as initially not allocated. It also initialises Sched,
considering the route of each vehicle as, initially,
resting at its home SEC from its release time e
rt
to the end of the time horizon of the simulation th.
Therefore, even at the beginning of the simulation
(time unit 0), all vehicles have an associated schedule
(even if such schedule does not start until a release
time unit e
rt
in the future).
∀t ∈ T Alloc[t
id
] = (e
id
, −1)
∀e ∈ E ∃s
id
∈ S with s
x
, s
y
, s
E
, e ∈ s
E
s.t. Sched[e
id
] =
[(e
rt
,th, s
x
, s
y
, s
x
, s
y
, 0, 0, e
bc
, e
bc
, idle,th − e
rt
, 0)]
For example, given the instance of Section 3.1,
the initial value of Al loc and Sched is as follows:
Alloc ≡ {(T P
1
, −1), (T P
2
, −1), (T P
3
, −1)}
Sched ≡ {(EV
1
, [(0, 10, 1, 2, 1, 2, 0, 0, 10, 10, idle, 10, 0)]
(EV
2
, [(5, 10, 1, 2, 1, 2, 0, 0, 10, 10, idle, 5, 0)]}
The algorithm then simulates a reactive-based
ride-sharing service by simply sorting all trip peti-
tions by their increasing release time (referred to as
sorted(T )), thus attempting to serve each trip petition
as soon as it is released. For each t ∈ sorted(T ), the
algorithm iterates for each e ∈ E, attempting to allo-
cate the trip to the vehicle by dynamically re-routing
its schedule (i.e., by fitting both the pick-up and drop-
off of t as new movements into the existing schedule
of the vehicle Sched[e]. As soon as the algorithm suc-
cessfully allocates t to a vehicle e, the search stops
(i.e., the trip is not attempted to be allocated to any
other vehicle). On the other hand, if no vehicle can
allocate t, then the attempt to serve the trip petition is
considered as not successful, and no further attempt
for allocating it is made for the rest of the simulation.
For example, given the instance of Section 3.1, the
trips T P
1
, T P
2
and T P
3
are released in time units 0, 2
and 6, respectively. Therefore:
1. The algorithm simulates that T P
1
is attempted to
be allocated first, at time unit 0. On that moment,
the schedule of EV
1
and EV
2
is the initial one
described above. If EV
1
can be successfully re-
routed to fit T P
1
, then it is allocated to it. Other-
wise EV
2
is attempted. If T P
1
can not be serviced
by either EV
1
or EV
2
, then T P
1
is not allocated. In
any case, these allocation attempts lead to a new
updated state Sched
′
and Alloc
′
.
2. The algorithm continues by attempting to allocate
T P
2
over EV
1
first and EV
2
otherwise with their
current updated schedules Sched
′
at time unit 2,
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
32

further leading to a new updated state Sched
′′
and
Alloc
′′
.
3. Finally, the algorithm continues by attempting to
allocate TP
3
over EV
1
first and EV
2
otherwise
with their current updated schedules Sched
′′
at
time unit 6, leading to the final state (the one re-
ported as output) Sched
′′′
and Alloc
′′′
.
4.1.2 Trip Petition Allocation
The allocation of t to e (specifically, to its schedule
Sched[e]) is defined to be successful iff:
1. The updated Sched[e]
′
incorporates one new
movement ensuring the pick-up (resp. drop-off)
of t within its defined time window t
ep
and t
l p
(resp. t
ed
and t
ld
). The functions pick up (resp.
drop o f f ) ensure this (cf. Algorithm 1).
2. The updated Sched[e]
′
contains a very last active
movement, labelled as ret, ensuring the vehicle
returning to its home SEC before the end of the
time horizon th. The functions ret sec ensures this
(cf. Algorithm 1).
3. The addition of these new pick-up, drop-off and
ret movements to Sched[e]
′
(to serve t) might de-
lay the actual pick-up and drop-off times of any
other previous trips t
z
the vehicle e had previously
committed to. For t to be successfully allocated to
e, such these additional delays on serving t
z
must
not break the pick-up and drop-off time windows
of t
z
. In other words, once a vehicle e commits
to a trip t
z
, no further trip allocation t can delay
e enough to make it not serving t
z
in time. The
functions pick up (resp. drop o f f ) ensure this
(cf. Algorithm 1).
4. The updated Sched[e]
′
contains no movement
where the number of passengers exceeds its ca-
pacity e
pc
or where the battery capacity e
bc
goes
below 0.
To fit t into Sched[e] = [m
0
, . . . , m
k−1
] the algo-
rithm iterates through its movements (which are in
chronological order). When considering a movement
m
a
≡ (TA
a
, T B
a
, ...), the algorithm only considers its
starting time unit TA (i.e., the decision of whether to
re-route or not e to serve t is considered just at TA, not
at any other given time in the interval (TA, . . . , T B].
First, the algorithm searches for a movement m
i
fitting the pick-up of t. As soon as such movement
m
i
is found, no further movement m
j
with j > i of
e is considered for picking-up t, and the algorithm
moves on into searching for a movement m
j
fitting
the drop-off of t. Again, as soon as such movement
m
j
is found, no further movement m
k
with k > j of e
is considered for dropping-off t.
Needless to say, both policies of (1) considering
just the starting time TA of each movement and (2)
considering just one valid pair (m
i
, m
j
) of picking-
up and dropping-off movements search to be incom-
plete. That is, the search is not considering other (m
i
′
,
m
j
′
) valid combinations and any other valid re-routing
times for such combinations other than TA
i
′
and TA
j
′
.
Any such alternatives might lead not only to the allo-
cation of t, but to an overall higher number of trips
allocated, which is the goal aimed by the algorithm.
However, these policies are designed to favour scala-
bility over optimality for the algorithm (more detail in
Section 4.2). Moreover, although not leading to opti-
mality, the above non-complete search still leads to a
very competitive trip allocation rate when applied to
real-world very large instances, as it is discussed in
more detail in Section 5.2.
Given the instance of Section 3.1, the following
analyses the attempt to fit TP
2
into EV
1
at time unit 2.
T P
2
≡ (2, 2, 1, 1, 1, 3, 4, 5, 6)
As described previously, at this stage in the simu-
lation, TP
1
had been successfully allocated to EV
1
,
making its Sched[EV
1
]:
Sched[EV
1
] = [
m
0
≡ (0, 2, 1, 2, 2, 3, 0, 1, 10, 8, +T P
1
, 2, 2),
m
1
≡ (2, 7, 2, 3, 0, 0, 1, 0, 8, 3, −T P
1
, 0, 5),
m
2
≡ (7, 10, 0, 0, 1, 2, 0, 0, 3, 0, ret, 0, 3)]
The window of opportunity for allocating the
pick-up of T P
2
is from T P2
rt
= 2 to T P2
l p
= 4.
The algorithm first attempts to fit the pick-up on
m
0
, but fails, as the time of the movement TA
0
is 0,
even before T P
2
is announced, and therefore outside
of its window of opportunity.
The algorithm then attempts m
1
, and it succeeds.
m
1
spans from time unit TA
1
= 2 to T B
1
= 7, going
from (2,3) to (0,0) for dropping-off T P
1
. The total
distance covered is 5. It must be at (0,0) at time unit
7 at the latest (T P1
ld
= 7), so it cannot be further de-
layed. Re-routing m
1
to serve pick-up of T P
2
involves
(1) going from (2,3) to (2,1); (2) arrive there between
time units 3 and 4; (3) going from (2,1) to (0,0); (4)
still arrive there on time (i.e., time unit 7 + 0 leeway =
7). The total distance of re-route to pick-up T P
2
while
still dropping-off TP
1
from there is 2 + 3 = 5; if leav-
ing straight-away at time unit 2, it will reach (2,1) to
pick-up T P
2
at time unit 4, still within the window of
opportunity, and leading to a leeway of 0, as this new
movement cannot be any further delayed.
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service
33

Figure 2: S ched[EV
1
] when Fitting T P
2
.
The new state of Sched
′
[EV
1
] is:
Sched
′
[EV
1
] = [
m
′
0
≡ (0, 2, 1, 2, 2, 3, 0, 1, 10, 8, +T P
1
, 2, 2),
m
′
1
≡ (2, 4, 2, 3, 2, 1, 1, 2, 8, 6, +T P
2
, 0, 2),
m
′
2
≡ (4, 7, 2, 1, 0, 0, 2, 1, 6, 3, −T P
1
, 0, 3)
m
′
3
≡ (7, 10, 0, 0, 1, 2, 0, 0, 3, 0, ret, 0, 3)]
The window of opportunity for allocating drop-off
of T P
2
is from the next time unit to its pick-up (5) to
T P2
ld
= 6.
The algorithm first attempts m
′
2
(as it does not start
attempting the drop-off allocation any earlier than the
pick-up movement), and it succeeds. m
′
2
spans from
time unit TA
′
2
= 5 to T B
′
2
= 7, going from (2,1) to
(0,0) for dropping-off T P
1
. The total distance cov-
ered is 3. It must be at (0,0) at time unit 7 at the lat-
est (T P1
ld
= 7), so it cannot be further delayed. Re-
routing m
′
2
to serve drop-off of T P
2
involves (1) go-
ing from (2,1) to (1,1); (2) arrive there between time
units 5 and 6; (3) going from (1,1) to (0,0); (4) still
arrive there on time (i.e., time unit 7 + 0 leeway = 7).
The total distance of re-route to drop-off T P
2
while
still dropping-off TP
1
from there is 1 + 2 = 3; if leav-
ing straight-away at time unit 4, it will reach (1,1) to
drop-off T P
2
at time unit 5, still within the window of
opportunity and leading to a leeway of 1 as the time
window for dropping TP
2
ends at time unit 6
The new state of Sched”[EV
1
] is:
Sched”[EV
1
] = [
m
0
” ≡ (0, 2, 1, 2, 2, 3, 0, 1, 10, 8, +T P
1
, 2, 2),
m
1
” ≡ (2, 4, 2, 3, 2, 1, 1, 2, 8, 6, +T P
2
, 0, 2),
m
2
” ≡ (4, 5, 2, 1, 1, 1, 2, 1, 6, 5, −T P
2
, 1, 1)
m
3
” ≡ (5, 7, 1, 1, 0, 0, 1, 0, 5, 3, −T P
1
, 0, 2)
m
4
” ≡ (7, 10, 0, 0, 1, 2, 0, 0, 3, 0, ret, 3, 0)]
Figure 2 displays the re-routing of EV
1
to fit
T P
2
. Whereas its top-left (resp. bottom-left) display
the movements before the re-routing for the pick-up
(resp. drop-off), the top-right (resp. bottom-right)
display the movements after the re-routing.
Finally, if a re-routing movement m
i
or m
j
serving
t implies a delay of d units, this delay must be sup-
ported by any further movement in the schedule. Idle
movements use their own leeway to reduce d (until
eventually reduce it to 0), and any non further move-
ment serving t
z
must have a leeway of, at least, the
remaining delay when reaching it.
4.2 Complexity Analysis
An evaluation of the algorithm reveals its complexity
to be, at worst, O(n
2
), where n is the number of trips,
m the number of vehicles and n > m.
A movement-centric reasoning is used. Given m
vehicles, at the start of the simulation each of them
has a schedule with a single (very large) idle move-
ment (c.f., 4.1.1). From then on-wards, each trip is
attempted to be allocated, by iterating through the ve-
hicles and, for each vehicle, by iterating through its
movements. This means that, in the worst case, first
trip will need to explore m × 1 = m movements. If
successful, two new movements will be added to the
schedule of the vehicle allocating it (one for pick-up
and one for drop-off). Thus, after allocating 1 trip, the
overall amount of movements of all vehicles will be
m + 2 (the m movements being there before and the 2
new ones). The same rationale applies over the next
trips attempted to be allocated; for the second trip, a
worst-case scenario of m + 2 movements will be at-
tempted before allocating it, leading to a new overall
amount of m+4 movements, and so on. Given n trips,
this leads to an overall amount of
n−1
∑
n=0
m + 2n
which can be decomposed as
n−1
∑
n=0
m +
n−1
∑
n=0
2n = (nm) +
(n
2
) − 3n − 2
2
n > m, the above expression is dominated by the term
n
2
2
, which leads to a worst-case scenario of O(n
2
).
5 EVALUATION
Section 5.1 presents a parameterised instance gener-
ator. The parametric generation enables fine-grained
customisation of the instances, which is then used in
sections 5.2 and 5.3 for respectively analysing the per-
formance and scalability of the solution approach de-
fined in Section 4.
Section 5.4 applies the parametric instance gener-
ator to a wider context, in this case customising the
well-known, real-world-based data-set of NYC Taxis
to valid ride-sharing problem-based instances. This
includes a mapping process from the areas and time-
line of the original data-set to the grid dimensions and
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
34

simulation time horizon required by the ride-sharing
problem defined in Section 3. The newly generated
benchmark is then used in Section 5.5, analysing the
performance of the ride-sharing service from the per-
spective of the amount of distance covered and the
number of vehicles used compared to more classical
taxi-based services or even individual private vehicle
transportation-based systems.
5.1 Parameterisable Instance Generator
Google HashCode (Google HashCode, 2018) is per-
haps the most popular team-based programming com-
petition in the world, with more than 100,000 pro-
grammers participating on each edition. On the quali-
fication round of 2018, a self-driven-based transporta-
tion system (a variant of the classical Vehicle Rout-
ing Problem with Time Windows) was proposed as a
challenge. Its very-large complex instances make it an
ideal candidate for testing the performance and scala-
bility of the solution approach described in Section 4.
However, although the challenge was also based on a
grid-based city and a simulated time horizon, the fol-
lowing features of the ride-sharing problem of Section
3 were not included in the challenge:
• The model does not include a set S of SECs, nor
an ownership mapping from E to S. Instead, a
single depo at location (0,0) is placed.
• The model does not include dynamic availability
of requests T and resources E over time. Instead,
all vehicles and trip petitions are available (e
rt
and
t
rt
) at time unit 0.
• The vehicles have unlimited battery capacity e
bc
and room for just one passenger e
pc
.
• The pick-up and drop-off windows of the trips
contain t
ep
and t
ld
, but not t
l p
nor t
ed
.
Therefore, all the above must be incorporated
when customising the instances of Google HashCode
to the ride-sharing problem. To enable a fine-grained
customisation allowing the solution approach to be
tested under different configurations, an instance gen-
erator is implemented, including:
Num SECs. A configurable integer number of
SECs |S| is created across the city, distributed uni-
formly among its areas. The vehicles E are also dis-
tributed uniformly across S, with each SEC
id
having a
same amount of vehicles |s
E
|.
Energy Generation Factor. Let sum dist be the
sum of the distance from pick-up to drop-off loca-
tions for all trips in T . A float value is passed to
specify the total energy generated, collectively, by
all SECs as a factor of sum dist. Thus, if factor is
2.0, then total energy = sum dist ∗ 2. A full use of
total energy is assumed, as well as its uniformly dis-
tribution among all SECs and vehicles. Therefore, the
factor ultimately impacts the battery capacity of all
vehicles, setting e
bc
=
total energy
|E|
.
Dispatch Mode. A unique energy generation
function f s is assumed to be applied to all SECs, with
a constant energy generation per time unit. A boolean
value is passed to specify such function. If f alse is
passed (let’s call it START ), then all vehicles of a SEC
are released at time unit 0, and f s = 0, producing no
further energy afterwards. Otherwise, if true is passed
(let’s call it SPREAD), a constant energy production
f s =
e
bc
×|s
E
|
th
is used, releasing a first vehicle per SEC
at time unit 0, and each of the remaining |s
E
| − 1 ve-
hicles at a constant pace across the time horizon, with
one new vehicle each
th
|s
E
|
time units.
Trip Flexibility Factor. As discussed, each trip
petition includes t
ep
and t
ld
, but not t
rt
, t
l p
nor t
ed
. In
the case of t
ed
, it is simply computed as t
ep
+ dist,
where dist is the Manhattan distance from pick-up
to drop-off location. A float value between 0 and 1
f lex is passed, representing the flexibility percent-
age for computing t
rt
= t
ep
− (t
ep
∗ f lex) and t
l p
=
t
ep
+ ((t
ed
− t
ep
) ∗ f lex). If flexibility factor tends to
1.0 (i.e., 100% flexible), then t
rt
tends to 0 (early an-
nouncement) and t
l p
tends to t
ed
(late pick-up far from
early pick-up). In other words, plenty of time to re-
route vehicles to accommodate the trip. On the other
hand, if the flexibility factor tends towards 0.0 (i.e.,
0% flexible), then both t
rt
and t
l p
tend to t
ep
(with
very little time to react from the announcement of the
trip and a very short time window for its pick-up.)
5.2 Analysis - Performance
The instance d metropolis.in from Google HashCode
is selected for its customisation to the ride-sharing
problem. The instance is very-large, representing
a city of 10,000 x 10,000 distance units, a simula-
tion time horizon of 50,000 time units, 400 vehi-
cles and 10,000 trip petitions. The instance gen-
erator is used for the fine-grained customisation of
d metropolis.in, leading to a new benchmark of 72
instances, coming from the 72 different combinations
of values for NumSECs, EnergyGenerationFactor,
DispatchMode and TripFlexibilityFactor below:
• Num SECs: 1, 4, 16.
• Energy Generation Factor: 0.5, 1.0, 2.0.
• Dispatch Mode: false (START ), true (SPREAD).
• Trip Flexibility Factor: 0.02 (2%), 0.10 (10%),
0.25 (25%), 0.50 (50%).
The 72 instances are run using the solution ap-
proach of Section 4 to evaluate the performance of
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service
35

the algorithm (i.e., the number of trip petitions being
allocated to vehicles).
Interestingly, a wide range of results are reported
for the 72 instances, from some successful with up to
8,969 trip petitions allocated (an 89,69% of the peti-
tions) to unsuccessful with 0 trip petitions allocated
(a 0% of the petitions). The set of results is discussed
below, to identify the factors (configurations) having
a bigger impact in the performance of the algorithm.
The best configuration is the one with < maximum
flexibility, max energy, earlier release of EV > and,
given that the number of SECs might have an impact,
the more SECs the better.
1. (F - 50%; SECs - 16; ST; EF - 2.0) ≡ 89.69%
2. (F - 50%; SECs - 4; ST; EF - 2.0) ≡ 89.55%
3. (F - 50%; SECs - 1; ST; EF - 2.0) ≡ 82.53%
The next 3 top results have the same configuration
as before, but now with energy factor 1.0. Therefore,
it seems that the best configuration is the one with
< maximum flexibility, earlier release of EV>, and
given that, the energy factor does have an impact, with
the more energy the better. After that, once again, the
number of SECs seems irrelevant.
4. (F - 50%; SECs - 1; ST; EF - 1.0) ≡ 77.69%
5. (F - 50%; SECs - 4; ST; EF - 1.0) ≡ 76.95%
6. (F - 50%; SECs - 16; ST; EF - 1.0) ≡ 76.40%
The next 6 results confirm that, among the duo <
maximum flexibility, earlier release of EV>, the ear-
lier release of EVs seems to be the top factor, as all
the 11 top results have START release. But, it can
also be observed the crucial importance of flexibil-
ity, as by reducing it from 50% to 25% the algo-
rithm passes from the previous range of TPs satisfied
of [76.40, 89.69] to a reduced performance result of
[49.45, 61.84].
7. (F - 25%; SECs - 1; ST; EF - 1.0) ≡ 61.84%
8. (F - 25%; SECs - 1; ST; EF - 2.0) ≡ 61.67%
9. (F - 25%; SECs - 16; ST; EF - 2.0) ≡ 56.26%
10. (F - 25%; SECs - 4; ST; EF - 2.0) ≡ 55.20%
11. (F - 25%; SECs - 16; ST; EF - 1.0) ≡ 51.19%
12. (F - 25%; SECs - 4; ST; EF - 1.0) ≡ 49.45%
The next 8 results confirm that, among the duo <
maximum flexibility, earlier release of EV>, the ear-
lier release of EVs seems to be the top factor, followed
by the flexibility. If top flexibility is maintained at
50%, but release the EVs over the time horizon, the
decrease in total TPs satisfied continues, from the pre-
vious range [49.45, 61.84] to a new one of [41.73,
49.09]. If flexibility decreases again back to 25%,
then the range decreases even a bit more, to 35.57%
of the petitions satisfied.
13. (F - 50%; SECs - 16; SP; EF - 2.0) ≡ 49.09%
14. (F - 50%; SECs - 1; SP; EF - 2.0) ≡ 48.82%
15. (F - 50%;SECs - 4; SP; EF - 2.0) ≡ 47.76%
16. (F - 50%; SECs - 4; SP; EF - 1.0) ≡ 45.02%
17. (F - 50%; SECs - 16; SP; EF - 1.0) ≡ 42.06%
18. (F - 50%; SECs - 1; SP; EF - 1.0) ≡ 41.73%
19. (F - 25%; SECs - 1; SP; EF - 2.0) ≡ 35.86%
20. (F - 25%; SECs - 1; SP; EF - 1.0) ≡ 35.57%
The next 16 results show that, all the above analy-
sis state when there is enough energy being produced.
In the case of scarcity of energy, then this turns out to
be the most important factor, as the range of TPs satis-
fied decreases dramatically, to [15.38, 30.31]. That is,
if there is a scarcity of energy, the best configuration
satisfies the 30.31% of the TPs. However, when look-
ing only at SPREAD, there is a configuration leading
to 49.09% of TPs satisfied. Likewise, when looking
only at flexibility 25%, there is a configuration lead-
ing to 61.84% of TPs satisfied.
21. (F - 50%; SECs - 1; ST; EF - 0.5) ≡ 30.31%
22. (F - 25%; SECs - 1; ST; EF - 0.5) ≡ 29.94%
35. (F - 50%; SECs - 16; SP; EF - 0.5) ≡ 17.07%
36. (F - 25%; SECs - 16; SP; EF - 0.5) ≡ 15.38%
The next 24 results show that, all the above analysis
state when there is enough flexibility. If flexibility be-
comes very low, with the TPs having very little mar-
gin (2% or even 10%), then the vast majority of the
TPs cannot be satisfied, even with an earlier release
of EV and plenty of energy.
37. (F - 10%; SECs - 4; ST; EF - 0.5) ≡ 12.77%
38. (F - 10%; SECs - 16; ST; EF - 0.5) ≡ 12.61%
39. (F - 10%; SECs - 16; SP; EF - 0.5) ≡ 9.95%
58. (F - 10%; SECs - 4; SP; EF - 1.0) ≡ 4.30%
59. (F - 10%; SECs - 16; SP; EF - 2.0) ≡ 3.93%
60. (F - 2%; SECs - 16; SP; EF - 1.0) ≡ 3.93%
Interestingly, the lack of flexibility can even lead
to 0 TPs satisfied. This is the case when there is just
1 SEC, placed in the centre of the city. Irrespective
of the early or spread release of the EVs, a very tight
flexibility in the TPs can make it impossible for an EV
to leave from the centre of the city, and reach both the
pick-up and drop-off in time. This situation does not
happen at all when there are 4 or even 16 SECs, as
this the EV is closer to extreme pick-up or drop-off
points, making it possible to reach to the destination
even with a very tight flexibility.
61. (F - 10%; SECs - 1; ST; EF - 2.0) ≡ 0.06%
72. (F - 2%; SECs - 1; SP; EF - 0.5) ≡ 0.00%
All in all, the analysis above leads to the following
conclusions:
• The most important factor is to have enough flex-
ibility in the TPs (of at least 25%).
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
36

• This is followed by having enough energy (of at
least 1.0 times the one required to accomplish all
the TPs).
• With enough flexibility and energy, the most rele-
vant factor is to have earlier release of the EVs.
• On top of that, the more flexibility the better (50%
better than 25%).
• If all SECs are uniform in terms of their number
of vehicles and energy production, then the num-
ber of SECs does not have an impact in the results,
except for the extreme cases with very few flexi-
bility and a unique SEC placed in the centre of the
city.
5.3 Analysis - Scalability
The same 72 instances of the benchmark of Section
5.2 (referred to as d 10000 400 due to its 10,000 trip
petitions and 400 vehicles) are considered again to
evaluate the scalability of the algorithm. Also, smaller
versions by factor f of such benchmark are achieved
by simply removing
1
f
trips and vehicles from the in-
stances of the original d 10000 400. Table 1 shows
the total running time (resp. average running time per
instance) in seconds as the size of the instances scale
from 1,000 trips and 40 vehicles to 10,000 trips and
400 vehicles. Benchmarks have been run in a Mac
OS Ventura, Intel i7 Quad Core 2.3Ghz processor and
16GB RAM memory. The algorithm has been imple-
mented in Python and run with Python 3.10.5.
The results confirm the scalability of the solution
approach of Section 4, as it is able to solve very large
instances (as the ones of d 10000 400) in less than 2
minutes. Together with the previous ones of Section
5.2, it is concluded that the algorithm provides both
good performance and scalability.
5.4 NYC Taxi Instances
The data-set (NYC Green Taxi data, 2018) covers the
entire fleet of taxi operators in NYC and comprises a
total of 1,048,575 trips. The records include fields to
capture pick-up and drop-off dates/times, pick-up and
drop-off locations and trip distances. The data used
were collected and provided by the NYC Taxi and
Table 1: Scalability of the Algorithm.
Benchmark Total Time Avg. Time
d 40 1000 40.82 0.54
d 100 2500 221.29 2.91
d 200 5000 933.2 12.28
d 400 10000 9038.0 118.92
Limousine commission by technology providers au-
thorised under the Taxi cab and Livery management
enhancements program. The NYC taxi data models
a wide array of attributes such as tip amount, pay-
ment type, and fare amount. However, for the exper-
iments conducted, the attributes considered are men-
tioned in Table 2.
The ride-sharing service allows various vital pa-
rameters to be dynamically adjusted, as presented in
Section 5.1. On top of the configuration described
then, the customisation of the NYC taxis uses a fixed
battery capacity per vehicle, and then allows to pa-
rameterise the total amount of vehicles as a factor of
such battery capacity and the total energy being pro-
duced.
5.4.1 Grid-Generation
A grid-based mapping approach is used. This ap-
proach significantly decreases the time required to
analyse data compared to a spatial resolution of near-
continuous coverage data (Ramsdale et al., 2017).
Grid-based mapping provides a consistent and stan-
dardised approach to spatial data collection. A grid
map is a set of cells where the users can customise
their geometries, and visual representations (Ferreira
et al., 2013). An example of a grid map of taxi zones
in NYC is shown in Figure 3. To divide the spatial
polygon of the NYC map with 262 taxi zones (NYC
Taxi Zones, 2023) into a grid, Quantum Geospatial
Information System(QGIS) is used. The OGC coor-
dinate reference system (OGC: EPSG7326-WGS84),
proposed in the world geodetic system 1984 ensem-
ble (EPSG:7326), is used to form the grids. The
average trip distance from the NYC taxi data set
is 2.7 miles, with the shortest trip being 0.2 miles.
Therefore, the horizontal and vertical spacing is set
at 0.01 miles, and a ‘420X556’ grid map is gener-
ated. A GeoJSON file is generated for the grid lay-
out of the NYC map. The instance generator com-
putes the pick-up and drop-off locations of passengers
based on the ‘PULocationID’, the ‘DOLocationID’
and trip distance of the passengers from Table 2.
Table 2: NYC Attributes.
Attribute Eg.Value
!pep pickup datetime 01/01/2018 12:18:50 AM
!pep dropoff datetime 01/01/2018 12:24:39 AM
PULocationID 236
DOLocationID 236
trip distance 0.7
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service
37

Figure 3: Taxi zones in Bronx, New York (NYC Green Taxi
data, 2018).
5.5 Analysis - Ride-Sharing Vehicles
and Distance Traversed
Interestingly, when running a large-scale instance for
the NYC taxis, the best configuration turns out to be
the very same one as reported in Section 5.2. This
confirms the configuration observations reported then,
in this case observed when applying the ride-sharing
service over a real-world data-set:
(F − 50%; SECs − 16; ST ; EF − 2.0)
This time, the experiments are focused on analysing
the performance of the ride-sharing service when
compared to both a more classical taxi-based service
and to an individual, private vehicle transportation-
based service. In this case, both the amount of dis-
tance covered and the number of vehicles used are
analysed.
• Taxi Mode: In this mode, EVs aim to pick-up
and drop-off passengers sequentially, as opposed
to the ride-sharing mode, where several passen-
gers might, temporarily, share a vehicle during
their trips.
• Individual Mode: This mode represents a private
mode of transportation. Each passenger uses a
privately owned EV to commute from the pick-up
to the drop-off point.
The overhead of both taxi and ride-sharing modes
w.r.t. individual mode is for the extra distance tra-
versed by the EV from the drop-off point to the pick-
up point of subsequent requests. Whereas in ride-
sharing mode the possibility of having multiple pas-
sengers sharing the vehicle might reduce this extra
distance, in the case of the taxi mode the extra dis-
tance becomes non-avoidable.
Table 3 shows the results when running a large
instance with thousands of trip petitions. The ride-
sharing service is configured to use 704 vehicles, and
it manages to serve 4,514 trip petitions. When com-
pared to individual mode, the use of the ride-sharing
Table 3: Ride-share vs Taxi vs Individual.
Mode Vehicles Distance(miles)
Ride-share 704 70360
Taxi 718 71164
Individual 4514 57909
service would have allowed to put 4,514 - 704 = 3,810
vehicles out of the road, a reduction of an 84.4%.
The algorithm is then re-run for taxi mode. This
time it is set to contain: only the 4,514 petitions that
were served above; an unlimited amount of vehicles
(to ensure that all 4,514 trip petitions are indeed sat-
isfied); and a single passenger capacity on each vehi-
cle (to ensure that no two trip petitions might share
a vehicle while being served). The focus is now on
the actual number of vehicles used by the algorithm,
which turns out to be slightly higher than before (718,
an increase of 1.9% w.r.t. ride-sharing mode).
In terms of the overall distance traversed, the ride-
sharing mode has an overhead of 70,360 - 57,909 =
12,451 extra miles, representing an increase of 21.5%
in the distance on the individual mode. In the case
of taxi-mode, this increase is even higher, confirming
the benefits of the ride-sharing mode vs. the taxi sim-
ulation also.
6 CONCLUSIONS AND FUTURE
WORK
This paper has presented the design, implementation
and evaluation of a carbon-neutral, community-based,
reactive ride-sharing service for a Smart City with a
100% EVs operating solely over RES.
The ride-sharing service has been formulated as
a variant of the classical Dynamic Vehicle Routing
Problem with Time Windows, with both dynamic re-
sources and requests. The objective function has
been set to maximise the overall number of trip pe-
titions being served. The problem has been solved
via a reactive-based simulation approach on top of a
greedy-based decision-making process.
An instance generator has been developed to cre-
ate configurable scenarios to evaluate the proposed
approach. It was used to extend existing existing
benchmarks (Google HashCode) and public datasets
(NYC taxis) to the problem formulation and testing
the proposed algorithm under different settings.
The ride-sharing service has proven to scale well,
with a quadratic algorithm complexity over its num-
ber of trips, allowing to solve an instance of about
1,000 trips in less than a second, and an instance of
about 10,000 trips in less than two minutes. Although
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
38

favouring scalability over optimality, the service has
proven to be able to solve up to 90% of the in-
stances for some configurations of d metropolis.in, a
complex instance from the Google HashCode. When
applied to the real-world data-set of the NYC taxis
and compared to an individual private transportation,
the ride-sharing approach has been proven to offer
a good trade-off between the amount of vehicles re-
duced (84%) and its overhead in terms of distance tra-
versed (21%). The complete code can be accessed via
GitHub (Nagarajan, 2023).
Future work will include the analysis of the ride-
sharing service under diversity on its SECs specifi-
cation, i.e., diversity in the number of vehicles and
energy produced by each SEC. Coupled with the as-
sociation of each trip petition to a given SEC, this will
allow to evaluate the ride-sharing service under unbal-
anced resources and requests for different SECs. Re-
search will then investigate the possibility of trading
services among SECs, ultimately exploring a decen-
tralised solution approach where each SEC competes
for serving a trip petition. This decentralised setting
will be explored in both reactive and proactive modes,
simulating that all trips were known beforehand. Fi-
nally, it is intended to integrate the ride-sharing ser-
vice as part of an existing simulation-tool, as Sumo
(Alazzawi et al., 2018).
ACKNOWLEDGEMENTS
This research work is supported by Science Foun-
dation Ireland Centre for Research Training focused
on Future Networks and the Internet of Things (Ad-
vanceCRT), under Grant number 18/CRT/6222.
REFERENCES
Agatz, N. A. H., Erera, A. L., Savelsbergh, M. W. P., and
Wang, X. (2012). Optimization for dynamic ride-
sharing: A review. Eur. J. Oper. Res., 223(2):295–303.
Al-Abbasi, A. O., Ghosh, A., and Aggarwal, V. (2019).
Deeppool: Distributed model-free algorithm for ride-
sharing using deep reinforcement learning. IEEE
Trans. Intell. Transp. Syst., 20(12):4714–4727.
Alazzawi, S., Hummel, M., Kordt, P., Sickenberger, T.,
Wieseotte, C., and Wohak, O. (2018). Simulating the
impact of shared, autonomous vehicles on urban mo-
bility – a case study of milan. In SUMO’18, volume 2
of EPiC Series in Engineering , pages 94–110. Easy-
Chair.
Diamantoulakis, P. D., Kapinas, V. M., and Karagiannidis,
G. K. (2015). Big data analytics for dynamic energy
management in smart grids. Big Data Res., 2(3):94–
101.
EU Green Deal (2020). https://ec.europa.eu/info/strategy/
priorities-2019-2024/european-green-deal en.
Ferreira, N., Poco, J., Vo, H. T., Freire, J., and Silva, C. T.
(2013). Visual exploration of big spatio-temporal ur-
ban data: A study of new york city taxi trips. IEEE
Trans. Vis. Comput. Graph., 19(12):2149–2158.
Furuhata, M., Dessouky, M., Ord
´
o
˜
nez, F., Brunet, M.-E.,
Wang, X., and Koenig, S. (2013). Ridesharing: The
state-of-the-art and future directions. Transportation
Research Part B: Methodological, 57:28–46.
Google HashCode (2018). https://codingcompetitions.
withgoogle.com/hashcode/archive/2018.
Hasan, M. H. and Hentenryck, P. V. (2020). The flexible and
real-time commute trip sharing problems. Constraints
An Int. J., 25(3-4):160–179.
Hasan, M. H., Hentenryck, P. V., Budak, C., Chen, J., and
Chaudhry, C. (2018). Community-based trip sharing
for urban commuting. In AAAI’18, pages 6589–6597.
AAAI Press.
Jaillet, P. and Wagner, M. (2008). Online Vehicle Routing
Problems: A Survey, volume 43, pages 221–237.
Nagarajan, A. (2023). https://github.com/Nasheor/reactive
rideshare.git.
NYC Green Taxi data (2018). https://data.cityofnewyork.
us/Transportation/2018-Green-Taxi-Trip-Data/
w7fs-fd9i.
NYC Taxi Zones (2023). https://data.cityofnewyork.us/
Transportation/NYC-Taxi-Zones/d3c5-ddgc.
Ramsdale, J., Balme, M., Conway, S., Gallagher, C., Gas-
selt, S., Hauber, E., Orgel, C., S
´
ejourn
´
e, A., Skin-
ner Jr, J., Costard, F., Johnsson, A., Losiak, A., Reiss,
D., Swirad, Z., Kereszturi, A., Smith, I., and Platz, T.
(2017). Grid-based mapping: A method for rapidly
determining the spatial distributions of small features
over very large areas. Planetary and Space Science,
140.
Serra, T., Raghunathan, A. U., Bergman, D., Hooker, J. N.,
and Kobori, S. (2019). Last-mile scheduling under
uncertainty. In CPAIOR’19. LNCS 11494, Springer.
Xiang, Y., Liu, J., Li, R., Li, F., Gu, C., and Tang, S. (2016).
Economic planning of electric vehicle charging sta-
tions considering traffic constraints and load profile
templates. Applied Energy, 178:647–659.
A Carbon-Neutral, Community-Based, Reactive and Scalable Ride-Sharing Service
39
