
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children
Computational Thinking
Nada Sharaf
1
, Ghada Ahmed
2
, Omnia Ashraf
2
and Walid Ahmed
2
1
The German International University, Egypt
2
The German University in Cairo, Egypt
Keywords:
Computational Thinking, Robotics, Programming for Children, Educational Robots.
Abstract:
Nowadays, technology is fundamental in almost every aspect of our lives. Our daily life is endowed with
many devices as mobiles, laptops, televisions that depend solely on technology. Therefore, Computational
Thinking is growing faster into a form of an imperative literacy that needs to be learnt by young children as
well as Programming in order for them to be more prepared for the future. From an educational point of view,
it is very essential to improve and develop computational thinking and problem algorithmic-solving skills of
young students. This study investigates how successfully small kids between 7-11 years old can comprehend
and use basic programming concepts. Through this study, children have to learn three major programming
concepts (sequential, conditional, iteration) by using a robot in a maze game that targets these concepts. The
robot has a voice recognition feature that can easily be used by children to direct the robot out of the maze
by using the three different programming approaches. The experiment has 36 participants, then by means of
a “between-group experiment”, the participants have been divided into two groups. One of which has learnt
the concepts by using the robot to test the game (Experimental Group) while the other has learnt the concepts
by using the traditional methods of teaching (Control Group). The results of testing the learning processes
between the two groups have been compared and reported regarding the learning gain, engagement level and
system usability scale. The experiment has proved that the group who uses the robot has achieved significantly
better learning gain and better engagement than the group who has been taught by explaining the concepts on
a paper. Accordingly, using an educational robot is considered to be an effective and operative method for
teaching young children the basics of programming and computational thinking.
1 INTRODUCTION
Technology is definitely prevailing in almost every
aspect of our life. Most of the technologies around
children are made out of programmed chips and pro-
grammed software along with the hardware assem-
bled together to form out these types of technological
devices such as video games, tablets and mobile ap-
plications. Meanwhile, programming has become an
indispensable part that is incorporated in almost every
daily life activity. All the applications we use daily
are made and developed by programmers, as a result it
becomes very important to learn more about program-
ming and to understand more about the technologies
we use every day. Nowadays, computer programming
is considered to be one of the most important apti-
tudes for learning. From an educational point of view,
It is very important in improving and developing com-
putational thinking and problem algorithmic-solving
skills of young students(Fessakis et al., 2013).
Most kids interact with technologies every day in
their life. They stay hours on their mobile phones
using many applications or playing games without
having any knowledge about how these applications
work. Studies have shown that programming and de-
signing games by children can have a deep impact on
their way of thinking and their problem solving skills.
Furthermore, computational thinking creates positive
attitudes towards computers and electronics, increases
creativity; academic knowledge and skills and finally
makes kids interact more with computational prac-
tices (Denner et al., 2019). Learning computational
thinking does not necessarily mean that all kids have
to be programmers. Yet, understanding computa-
tional thinking by children does not only improve
problem solving skills, it also creates an efficient way
of thinking about real life problems and finding cor-
responding solutions. As a result, teaching children
Sharaf, N., Ahmed, G., Ashraf, O. and Ahmed, W.
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking.
DOI: 10.5220/0011852600003470
In Proceedings of the 15th International Conference on Computer Supported Education (CSEDU 2023) - Volume 1, pages 57-69
ISBN: 978-989-758-641-5; ISSN: 2184-5026
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
57

computational thinking and programming has become
a priority.
One way to enhance children’s computational
thinking is by using some graphical applications that
aim to teach children programming by playing a
game, for example: Scracth, Blockly and others. An-
other way to teach children programming is through
interacting with a robot programmed and developed
to teach them the basic concepts of programming and
how to think properly. Robots are simultaneously en-
trancing articles for the overall population and gad-
gets whose origination, understanding and program-
ming include numerous fields. This exceptional blend
makes them perfect devices for presenting science
and innovation to youthful ages (Magnenat et al.,
2012).
The main focus of this paper is to teach chil-
dren computational thinking and programming us-
ing an interactive robot with certain features. The
robot contains few sensors as well as different hard-
ware parts. Children can easily communicate with the
robot through voice commands since it has a voice
recognition feature to make the robot actually move
or do certain tasks as the main purpose of the robot is
to teach children the computational way of thinking
and enhance their problem solving skills.
The purpose of this research is to evaluate the im-
pact of using an interactive robot to teach children
computational thinking and basic programming con-
cepts. The robot is used to teach children program-
ming in an easier way than using a graphical program-
ming application with a screen. As mentioned before,
the robot contains few sensors along with some mo-
tors and hardware that make the robot interactive with
a voice recognition feature. Children can use voice
commands to make the robot move and do other func-
tions. Moreover, robots not only offer a teaching en-
vironment but they also make learning much more in-
teresting for kids. They engage with the robot try-
ing to understand the different aspects of the daily
technologies they use as well as understanding how
the robot works with the different integrated software
and hardware. Eventually, they know how to prop-
erly think and solve problems. In addition the robot
motivates children to improve interactive skills, cre-
ativity and more. Furthermore, the main aim of the
work is to compare between teaching children com-
putational thinking by using an interactive robot and
teaching children computational thinking by using the
old traditional method which is basically explaining
the basic concepts on a piece of paper. Two versions
of the robot were constructed. One was designed to
teach children programming through an interaction in
English language and the other in Arabic language.
This paper is divided into six sections. Section
one is an introductory section that discusses the im-
portance of integrating computational thinking in the
education of young children. Section two introduces
the related work of using robots and games in educa-
tion. Section three includes the methodology of the
game and how the robot works. Section four contains
the experimental design. Section five shows how the
testing is done and reports the results. Section seven
concludes the paper with directions to future work.
2 RELATED WORK
There are different practices carried out with a goal
to teach computational thinking and other educational
purposes. Educational robots are one of these ap-
proaches, they play a vital role in education, and their
usage has increased throughout the last years. This
chapter introduces the various work related to the field
of teaching children the fundamentals of program-
ming and other subjects which is done by different
methods. It also reveals some work that implements
the speech recognition feature.
2.1 Teaching Computational Thinking
Visual programming environments were used to en-
able children to build programs through simple in-
terfaces (KALELIO
˘
GLU and G
¨
ulbahar, 2014). Such
platforms include Scratch (MIT Media Lab, ) and
Alice (Carnegie Mellon University, ). According to
Armoin et al. (2015), teachers reported that using
Scratch increased the learning efficiency. Students
also reported that they were encouraged to learn more
about computer science.
“Program your robot” (Kazimoglu et al., 2012) is
a serious game developed for teaching programming
and computational thinking. The game aimed at in-
tegrating the game-play with the programming con-
cepts and computational thinking skills. The game
was evaluated using 25 students. The students en-
joyed the game and reported that this type of games
can improve their problem-solving skills.
Another example of an educational game for pro-
gramming used tangible electronic building blocks in-
stead of visual programming is presented in (Wyeth
and Purchase, 2002). The Tangible electronic blocks
are divided into sensors and sources for these sen-
sors. The child can build a structured block that does a
function by connecting the blocks together. The older
children were able to debug their structure in case of
a problem or undesired function. The results showed
that young aged children did not realize the concepts
CSEDU 2023 - 15th International Conference on Computer Supported Education
58

of programming using the Electronic Blocks. There-
fore, this way was not effective enough for the young
children.
2.2 Robotic Approaches
This section introduces the approaches that use robots
for teaching purposes.
2.2.1 IbnSina
IbnSina is the world’s first Arabic language conversa-
tional android robot that has an aim to become an ex-
citing educational and persuasive robot in the future
(Riek et al., 2010). It is a robot that offers an Arabic
conversation with people, it receives speech from the
users and responds with a relevant response. Acapela
speech recognition engine is the software integrated
in the IbnSina robot in order to understand the speech
and react accordingly. The Acapela uses an acous-
tic model that contains statistical representations of
the sounds that make up each acoustic unit, and a
language model that contains the probabilities of se-
quences of words. At the Language model layer of the
speech system of the robot, an artificial grammar that
restricts the recognition to a list of sentences that were
modeled in grammar is implemented(AcapelaGroup,
2009). Moreover a collection of sentences were de-
veloped for IbnSina to say, these phrases were en-
coded as UTF-8 text files, each having a keyword to
provide the appropriate response for the speech it rec-
ognized. The phrases in the corpus are converted to
speech when they are retrieved using the Acapela text
to speech engine. Figure 3.1 shows how the system of
IbnSina works.
2.2.2 IROBI
IROBI is an educational and a home robot. It can
teach English and tell the children nursery rhymes,
entertain the family by singing and dancing, and pro-
vide home security by monitoring, detecting and pho-
tographing unwanted intruders(Han et al., 2008). The
children can interact with it through voice commands
and if the robot failed to recognize the voice the robot
can be touched through the touch module that is in-
corporated in the robot. The touch interaction amelio-
rates children’s concentration and academic achieve-
ment(Han et al., 2008).
2.2.3 Thymio
Thymio is an educational robot with a considerable
amount of sensors and actuators to teach children
how to program. The robot can be programmed by
several programming languages like Scratch. It can
teach the basics of computational thinking in forms
of lessons: simple guiding commands, basic repeti-
tive commands, repetitive commands combined with
statements, basic conditions and variables, conditions
and functions(Constantinou and Ioannou, 2020). Fig-
ure 3 shows the computational thinking exercises
done by the Thymio robot programmed by Scratch.
2.2.4 Kodockly
Kodockly is an interactive programmable robot used
to teach children computational thinking and pro-
gramming through a game with several levels. It also
teaches some hardware programming concepts. The
robot has two versions Kodeocly 1.0 which is aimed
for children between the ages 6 and 8, and Kodockly
2.0 which targets children between the age 8 and 11
years. The robots are programmed using TUI (Tan-
gible User Interface) which are wooden blocks used
by the children. Each wooden block has an electronic
identification card that can be scanned by the scanner
installed in the robots. The process of teaching the
children programming is done through a game with
different levels for Kodockly 1.0 and to teach pro-
gramming and sensors based computational thinking,
the child can make a program of whatever number of
wooden blocks he wants from the available blocks of
Kodockly 2.0(Mohamed et al., 2021).
2.2.5 Interaction with Robots
The work presented in (Rogalla et al., 2002) showed
different ways to interact with robots including
speech. However, the language used was German and
the users were not children.
The work presented in (Wu et al., 2008) deploys
interaction through gestures using Wii remote as well
as voice. It targets teaching children as well. How-
ever, the aim is to teach them English and Mathemat-
ics. The robot is instructed by the teacher on how to
respond using a visual language. The communication
however needs a lot of modules and is not very cus-
tomizable for other purposes.
Using social interaction along with robots and
story telling was also employed with Kindergarten
children (Kory and Breazeal, 2014; Vaucelle and Je-
han, 2002; Hsieh et al., 2010). However, the aim is
to improve the language skills of the children and the
age group is smaller than our target age.
Robots were also used to enhance social inter-
action skills with children that have autism (Robins
et al., 2005). The results showed enhanced skills.
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking
59

Figure 1: Overview of the system of IbnSina robot(AcapelaGroup, 2009).
Figure 2: Interaction between IROBI and a child(Han et al.,
2008).
2.3 Problem
The problem in most of the ways used to teach chil-
dren programming lack the interaction between the
user and the robot or the graphical application.
3 DESIGN AND
IMPLEMENTATION
In this study, two friendly-looking robots were de-
signed and implemented. One robot recognises voice
commands in English while the other recognises the
commands in Arabic. Both robots were designed to
teach children in the age range of 7 to 11 years old
basics of programming. Children use the voice recog-
nition feature to program the robot to move in a maze
game made out of paper.
Figure 3: Thymio robot(Constantinou and Ioannou, 2020).
Figure 4: The computational thinking activities conducted
by Thymio(Constantinou and Ioannou, 2020).
3.1 Robots Design
The robots were designed to have a pleasant look to
encourage the kids to interact with it and have a fun
experience as shown in figures 7, 8. The robots bod-
CSEDU 2023 - 15th International Conference on Computer Supported Education
60

Figure 5: Kodockly 1.0 along with the maze(Mohamed
et al., 2021).
Figure 6: Front view of Kodockly 2.0(Mohamed et al.,
2021).
ies are built of different sensors and electronic com-
ponents that help in the process of the game.
The body of the robot is built by connecting pieces
of card-boards together by means of hot glue. The
robot itself does not have many sensors, it contains
only one ultrasonic sensor to detect near-by objects
in-case it is about to crash. The robot contains an ar-
duino uno board which is connected to a nodeMCU
(Wifi module) in order to receive commands using the
wifi. The robot also includes an H-bridge connected
to the 4 Dc motors in order to make the robot move,
along with 3 batteries that give out 11.1. The H-bridge
is connected to the arduino board via the output 5 volt-
ages port in the H-bridge and the ground. The arduino
board is also connected to a DF mini player which is
linked to a speaker to give out feedback. Two power
banks are used in this project as a source of power,
one is connected to the nodeMCU while the other is
connected to the arduino board to give out enough en-
ergy to make the speaker work. The main hardware
Figure 7: The Arabic Robot.
Figure 8: SYD: The english robot.
components used in the robots design are:
1. Arduino, Arduino is an open source platform that
consists of hardware and software. It is easily
used by everybody because of the fact that it is a
simplified version of C++ (Arduino IDE) and the
micro-controller hardware already introduced by
the company(Badamasi, 2014).
2. NodeMCU, the NodeMCU is an easily pro-
grammable Wi-Fi arduino module (Barai et al.,
2017). NodeMCU is used to send data coming
from the sensors to the server so the user decides
what he wants to do next. NodeMCU is used be-
cause of its cheap price and simplicity of com-
munication because of its embedded Wi-Fi mod-
ule(Edward et al., 2017).
3. H-bridge, the H-bridge is connected to the DC
motors of the robot in order to make the robot
move in the desired direction.
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking
61

4. TCS3200 Color Sensor, This module detects the
colors in RGB (red, green, blue) scale, it uses
its white light emitter to light up the surface and
the wavelengths of red, green and blue colors are
measured using the three filters the sensor has
(Red, Blue, Green) then a voltage equivalent to
the identified color is generated through the light
to voltage converter integrated in the sensor.
5. LDR (Light-Dependent Resistor), An LDR
(light-dependent resistor) is used to recognize if
the robot is moving in a dark or bright place. It de-
tects light levels, the resistance varies when light
falls upon the module and it decreases as the light
intensity increases so if the robot is in a dark place
the resistance will be high.
6. UltraSonic Sensor, the Ultrasonic Sensor is used
to detect near by objects. It is used to sense the
objects at proximity from the robot in order to
avoid hitting anything. When the module is pow-
ered, the transmitter on the sensor sends ultrasonic
sound wave at a frequency above the range of hu-
man hearing and as soon as it encounters an ob-
ject, it gets reflected back to the sensor where it is
received by the Ultrasonic receiver.
7. DC Motors and Wheels, the robot consists of 4
DC motors that are connected to wheels and to a
H-bridge.
8. DF Mini Player, In order to enhance the inter-
action experience with the robot, sound modules
were added to the system. The DF mini player
is used to play pre-recorded sounds by reading a
memory card mp3 file.
9. Speaker, a speaker is connected to the DF mini
player in order to play sounds and gives feedback
to the user.
3.2 SYD: The English Robot
SYD is programmed to recognize and process pro-
grams in English language using voice or written
commands. The keywords that can be used to trig-
ger the robot’s effect are shown in Table 1. The maze
(shown In Figure 12) consists of 3 levels that become
harder as the child moves on from a level to another.
Each level allows the children to learn a new program-
ming concept. The goal of the game is to get the robot
out of the maze. The maze itself is static and the child
has to get the robot out of the maze through the dif-
ferent programming approaches.
The robot is designed to receive voice commands
from a web API. First the command has to be said us-
ing the ”start recognition” feature.The desired com-
mand will be sent to Firebase database. The Fire-
Figure 9: Web API for voice control.
Figure 10: Firebase database.
base database then sends the desired command to the
NodeMCU, which in return sends the command to the
arduino board and then the program starts executing.
The interaction with SYD robot is done in 2 direc-
tion way; meaning that the robot replies to the child
command as well. To achieve that, a speaker is in-
stalled to provide some feedback for the child. The
speaker is connected to DF Mini Player, which has a
memory card with the saved dialogues that the robot
Figure 11: Maze game with the robot.
CSEDU 2023 - 15th International Conference on Computer Supported Education
62

Table 1: Functions of every command.
Command
Name
Function Of The Command
Hello Identification of the robot’s name
Forward Moves the robot 1 step forward
Backward Moves the robot 1 step backward
Right Turns the robot to the right
Left Turns the robot to the left
Start Starts the loop feature in the robot
Always Starts a forever loop
End Ends the Start and Always com-
mands
Forward if ob-
stacle right
Moves forward forever if obstacle
ahead moves right (always)
Forward if ob-
stacle left
Moves forward forever if obstacle
ahead moves left (always)
Backward if
obstacle Left
Moves forward forever if obstacle
ahead moves left (always)
Backward if
obstacle right
Moves forward forever if obstacle
ahead moves right (always)
Ok Stops the robot in case of always
(always)
says. Here is a list with some of the feedback exam-
ples:
1. If the child uses the ”hello” command the robot
will identify itself by saying ”Hello my name is
SYD, nice to meet you”.
2. if the command ”start” is used to perform a pro-
gramming loop, the robot will ask the child how
many times to repeat the desired movement by
saying ”Please say the number of times”.
3. After the specified number is said by the child, the
robot replies ”Please say the direction”.
4. After saying the direction, the robot instantly
starts executing and when it finishes, the robot
tells the child to end the loop by saying ”Please
end the loop”.
5. If the child does not say ”end”, in that case the
robot will not execute or respond to any other
commands until the ”end” command is said. This
is used to teach children that any program has to
have a beginning and an ending before moving on
to the next command.
6. if the child says the command ”always”, the robot
will reply with ”Please say the condition and di-
rection”, the child then has to pick up a condition
and a direction by stating ”forward (or backward)
if there is an obstacle move right (or left), to stop
the robot the child has to say the ”ok” command.
7. In the end the child also has to say the ”end” com-
mand to perform another movement or command.
3.2.1 The Maze Game
• Level 1 - Sequential Programming:
At this level the child is asked to use certain com-
mands like ”FORWARD, BACKWARD, LEFT,
RIGHT” to make the robot move in any desired
direction. The child then has to make the robot
reach a certain place using these commands. The
child is asked to direct the robot into a certain
place using only those simple commands. This
allows the child to learn the sequential program-
ming in a more fun and easy way. The commands
used in this level can be repeated for example:
”forward forward forward left backward left left
right backward” ... etc.
• Level 2 - Loops:
In this level the child is asked to do the same
sequential steps but this time s/he has to use
the loops instead of repeating the same move-
ment command. The child can use these
commands ”FORWARD, BACKWARD, LEFT,
RIGHT, START, END”, for example: ”start”, ”3”,
”forward right”, ”end”, the robot will then per-
form 3 forward right steps. The idea of every pro-
gram has to have a start and an end is introduced
through the ”start” and the ”end” command in this
level to perform a loop.
• Level 3 - Sequential vs. Loops
In the third level, the task assigned is to program
the robot to find its way out of the maze using the
least amount of commands. In this case the child
can use these commands ”FORWARD, BACK-
WARD, LEFT, RIGHT, START, END”. The child
has to choose between the regular movements to
get the robot out of the maze or the loops idea to
do the same task.
• Level 4 - Conditional Programming:
In this level the child is introduced to conditional
programming. The child can use these commands
”ALWAYS, FORWARD IF OBSTACLE RIGHT,
FORWARD IF OBSTACLE LEFT, BACKWARD
IF OBSTACLE RIGHT, BACKWARD IF OB-
STACLE LEFT”. The idea of this level is to make
the robot move with no stops until the robot finds
an obstacle in front of it, then it will take a step
backward then changes direction to the right or
to the left depending on the desired direction and
condition. A running example would be: ”al-
ways”, ”forward if obstacle right”. Moreover if
the child wants to make the robot stop the child
has to say the ”OK” command. Furthermore if
the child wants to perform another command then
he has to say the ”END” command.
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking
63
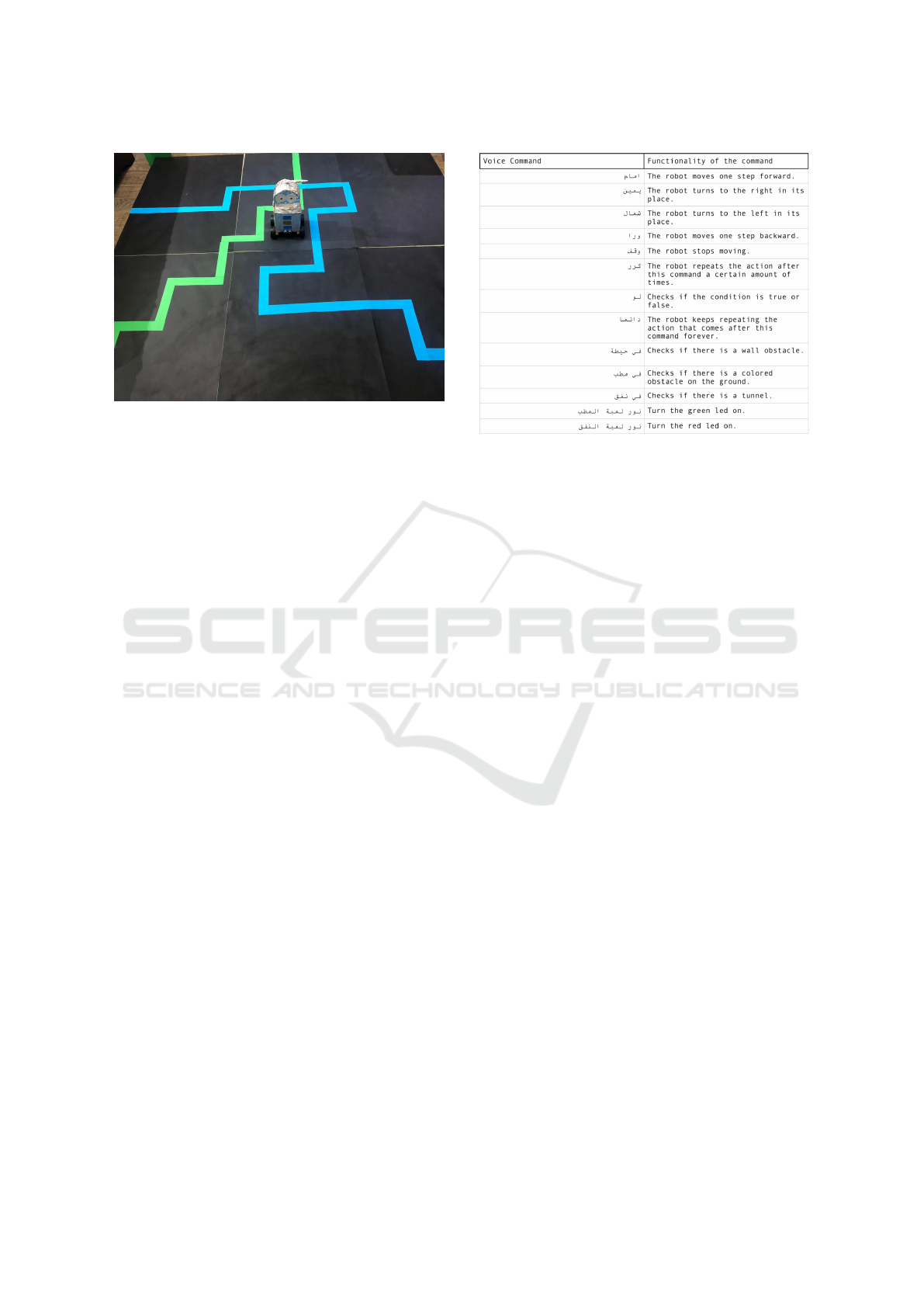
Figure 12: Maze game with the robot.
3.3 The Arabic Robot
The second robot is programmed by the children us-
ing Arabic voice commands as listed in figure 13. The
voice command is transferred from the microphone to
a python script created to transcribe the voice com-
mand to text. SpeechRecognition is the library used,
it is a wrapper for many speech APIs. Google Web
Speech API is the API implemented in the script. Af-
ter the speech is transcribed to text, it goes through
conditional statements and if it matches any of the
commands available by the system, the command is
sent to the Arduino that controls the robot through
the NodeMCU. The NodeMCU receives data from
the python script by implementing socket program-
ming. Socket programming is a procedure of connect-
ing two nodes on a network to communicate together,
it maintains inter- process communication (IPC). The
client socket is the socket that initiates the connec-
tion while the server socket is the one that listens on
a specific port at an IP. Thus a socket connection is
established between the NodeMCU and the python
script. The NodeMCU hosts the server socket. A
socket is created in the python script that connects
to the port that the NodeMCU listens on and its IP
address. The Arduino board receives the commands
from the NodeMCU serially through the Tx and Rx
pins and controls the movement of the robot and the
electronic components accordingly.
3.3.1 The Maze Game
• Level 1 - Sequential Programming: Sequential
programming is the concept to be gained from the
first level. The children have to make the robot
reach the end of the maze by following a certain
path. The commands available in this level are:
ÐAÓ@ (forward), @Pð (backward),
á
Ö
ß
(right), ÈAÖ
Þ
Figure 13: Arabic commands detected by the robot.
(left),
¯ð (stop). Any command can be repeated
many times sequentially. This level starts by the
robot stating the purpose of the game, the target of
the level and the available commands to be used
through the speaker module. Then, the child starts
by giving a command to be executed one at a time
by the robot until it gets out of the maze.
• Level 2 - Loops:
The concept of loops is established in this level.
The maze that needs to be solved is the same as in
level one. The available commands are: ÐAÓ@ (for-
ward), @Pð (backward),
á
Ö
ß
(right), ÈAÖ
Þ
(left),
¯ð (stop), PQ» (repeat). A new command is ac-
cessible in this level which is PQ» (repeat). This
command allows the robot to repeat the command
that comes after it the amount of times it was
asked to repeat. This time the child has to pro-
gram the robot to reach the end of the path us-
ing no more than five commands which will force
him to use the new command. The path that will
make the robot reach the end is a repeated pat-
tern so the child can choose the right commands
to repeat to solve the level. The level starts by the
robot explaining the goal of the level, its available
commands and the limit number of commands al-
lowed to use through the speaker module then if
the limit is reached and the maze is not solved,
the robot states that the goal is not met, there are
no more commands can be used and then asks the
child to try again through the speaker module.
• Level 3 - Conditional Programming:
In this level, the concept of conditions is intro-
duced. The maze of this level includes three types
CSEDU 2023 - 15th International Conference on Computer Supported Education
64

of obstacles: walls, ground colored obstacle, and
a tunnel. Seven new commands are accessible in
this level plus the commands of level one. The
new commands are:
AÖ
ß
@X (forever), ñË (if),
é¢J
k ú
¯ (wall obstacle
exists), I
.
¢Ó ú
¯ (ground obctacle exists),
®
K ú
¯
(tunnel exists), I
.
¢Ö
Ï
@
éJ
.
Ö
Ï
Pñ
K (turn ground obsta-
cle LED),
®
JË@
éJ
.
Ö
Ï
Pñ
K (turn tunnel LED on).
Any command can be repeated more than one
time. The AÖ
ß
@X (forever) command allows the
child to repeat the one command that comes after
it forever, until reaching the desired position. In
this level, more challenges are added to the maze
to enforce the use of conditions. These obstacles
are:
– The robot can not pass on a ground obstacle
without turning the ground obstacle LED on.
– The robot can not pass under a tunnel without
turning the tunnel LED on.
– If there is a wall, the robot cannot continue in
its path unless it goes left or right
The walls and tunnel obstacles are dynamic; they
can be placed anywhere on the maze. The robot
declares issues to players by a buzzer followed by
the robot stating the specific problem that needs
to be solved through the speaker module in three
cases:
1. If the robot is on a ground obstacle without the
ground obstacle LED on.
2. If the robot is told to go forward and there is a
wall at a certain proximity from it.
3. If the robot is in the tunnel without the tunnel
LED on.
The ground obstacle is colored so that it can be
detected by the robot using the color sensor when
the frequency changes, the walls are detected by
the ultrasonic sensor and the robot knows it is in
the tunnel by the photo-resistor sensor when its
readings change.
4 EXPERIMENTAL DESIGN
In this section, we are going to compare the effect of
using an interactive robot to teach children computa-
tional thinking and different programming concepts
to the traditional method of teaching. The purpose
of this experiment is to examine if the use of an in-
teractive robot in teaching programming concepts is
more efficient than the traditional methods. This ex-
periment aims to prove or reject the 3 null hypotheses.
Generally, the 3 null hypotheses suggest that there
are no differences between the efficiency of using the
robot in the game and using the traditional methods
of teaching programming to children.
1. The first hypothesis suggests that there is no dif-
ference in the learning gain between the two
groups.
2. The second hypothesis states that the engagement
level is not different in the two groups (Experi-
mental and Control).
3. The third hypothesis claims that there is no differ-
ence in the system usability scale between the two
approaches.
4.1 Focus Group
A focus group is a group that tests out the game before
conducting the experimental group. The main pur-
pose of making a focus group is to get feedback from
children and their parents concerning improvements
and/or modifications. A sample of 3 students within
the target age range tried the English robot. They
were asked to solve the first version of the pre-test and
post-test used in calculating the learning gain. The
learning gain test contained some cartoon mazes and
the children are asked to write the steps to make the
character reach a certain place. The children pointed
out some important point that needed modification
e.g. the question was not clear enough, some draw-
ings were misleading. Accordingly, their feedback
was taken into consideration and the tests were up-
dated for the real experiments.
4.2 Experiment
A between-group design
1
has been used in this exper-
iment. A between-group design is an experiment that
has two or more groups of subjects each being tested
by a different testing factor. It is basically dividing
participants into two groups or more and testing each
group with a different approach then compare the re-
sults.
Sample.
A sample of 36 children with a minimum age of 7
years old to 11 years old, has taken part in this exper-
iment. All participants had no experience in writing
a program (coding). The experiments were held to
test the effect of both robots (the English and Arabic).
Thus, the participants were divided into 2 groups; one
1
https://en.wikipedia.org/wiki/Between-group design
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking
65
for testing each robot (English Group ,Arabic Group).
The English group consisted of 20 children who were
further divided into an experimental (12 children) and
control (8 children) subgroups. The Arabic group
consisted of 16 children who were further divided
into an experimental (10 children) and control (6 chil-
dren) subgroups. The experimental group has used
the robot in the experiment while the control group
has been tested using the paper traditional way. All
students have been randomly selected for fair testing.
4.2.1 Procedure
Due to the current circumstances and the constraints
created by the Ministry Of Education because of
Covid-19 and the fact that there is a quarantine, in-
ternet video meetings have been scheduled with stu-
dents individually. Thus, the experiment lasted longer
than normal due to some technical issues. The exper-
iment took about 2-3 hours to be completed for the
experimental group. For the control group the exper-
iment only lasted for 1 hour. First both groups take
the learning gain pre-test and they have been asked
to finish it within 20 minutes, if there is a delay in
a question the students have been asked to pick the
most comfortable answer for them. Then for the ex-
perimental group students have been asked to open
the web API link on an android phone while opening
the video conference on a laptop where they can see
the robot and its corresponding actions. Basic move-
ments and commands are explained and demonstrated
to students, then they have started directly to engage
with the robot and learning about the 3 programming
concepts by playing the game. On the other hand, pro-
gramming concepts have been explained to the con-
trol group using paper and basic examples. After both
groups finish their experiment, they have been asked
to take the learning gain post-test which is the same
as the pre-test to be able to evaluate the progress they
have made. Finally, both groups have been asked to
take the engagement level test and the system usabil-
ity scale to finish the experiment.
4.3 Evaluation
Three tests have been conducted in this experiment to
compare between groups; learning gain, engagement
level and system usability.
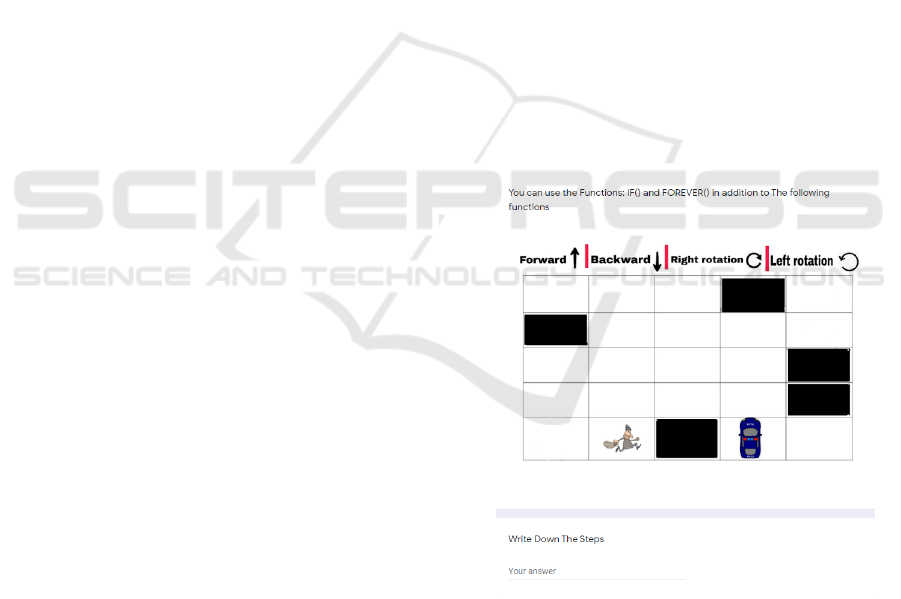
4.3.1 Learning Gain Test
The aim of this test is to assess the learning gain
of children through measuring their improvement
in computational knowledge, skill and development.
The test is basically a rectangular maze that consisted
of 25 blocks, it has a police car and a burglar. The
test includes 3 levels that become harder as the child
moves on to the next level, every level presents a
different programming concept (Sequential, Iteration
and Conditional). Movement commands are written
on the maze to help children understand the avail-
able commands as some children have struggled to
figure out the right or left rotations. The first 2 levels
have the same questions but with different answers,
as one of them tests the sequential type of program-
ming while the other tests iteration programming. All
questions of the test are multiple choice questions ex-
cept for the last one, children are asked to type the
right commands with no choices. All participants
have taken the test before conducting the actual ex-
periment whether it is trying out the robot or under-
standing the different programming concepts through
the traditional way. Participants are then asked again
to take the same test after finishing the experiment,
to measure the amount of knowledge they have learnt
from it. To measure the improvements children have,
the pre-test and post-test are compared. Both the pre-
test and the post-test have been the same to ensure
that children have dealt with the same level of diffi-
culty. An example of the questions is shown in Figure
14.
Figure 14: Learning gain test.
4.3.2 Engagement Level Test and System
Usability Scale
After finishing the experiment along with the pre-test
and post-test, participants have been asked to take the
engagement level test and the system usability scale.
The engagement level test is an 11 item questionnaire
that determines the time that children can take to en-
CSEDU 2023 - 15th International Conference on Computer Supported Education
66
gage and interact in a certain activity
2
. The system
usability scale provides a wider view of subjective as-
sessment of usability, it is a simple, ten-item attitude
Likert scale used to determine how easy a certain ac-
tivity is
3
. Both of these tests have been given out to
children at the end of the experiment and after taking
the learning gain post-test. They have been used to
analyse the overall experience and the feedback be-
tween the two groups (Experimental group and Con-
trol group). The child has to choose between Strongly
agree, Agree, Disagree, Strongly disagree.
5 RESULTS AND DISCUSSION
The results of the learning gain test, engagement level
test and system usability scale have been calculated
and compared according to the learning approach of
each group whether Experimental or Control. All the
results of these tests have also been discussed and re-
ported. Furthermore, an independent t-test has been
used to analyse the data comparison between the tests
of the two groups (Learning gain, Engagement level,
System usability) by means of SPSS (Statistical Pack-
age for the Social Sciences) to show if there are signif-
icant differences between the learning gain, the sys-
tem usability scale and the level of involvement be-
tween both the control group and the experimental
group or not.
5.1 Learning Gain Test Results
The purpose of this test is to compare the knowledge
gained by the experimental group which has inter-
acted with the robot, to the knowledge gained by the
control group which uses the traditional way of learn-
ing. The score of each participant is calculated by
subtracting the score of the pre-test from the score
of the post-test. The results of subtracting the learn-
ing gain tests (Pre-test and Post-test) show that the
learning gain of the experimental group which has
used the robot to learn the programming concepts,
is significantly higher than the control group which
has learned the programming concepts using the tra-
ditional way of explaining the concepts on a paper.
Moreover the results of the independent t-test (shown
in tables 2 and 3) stated that the learning gain of the
experimental group is higher than the learning gain
of the control group. The independent t-test results
prove that the hypothesis stated in the experimental
2
https://www.frontiersin.org/articles/10.3389/feduc.2
018.00036/full
3
https://en.wikipedia.org/wiki/System usability scale
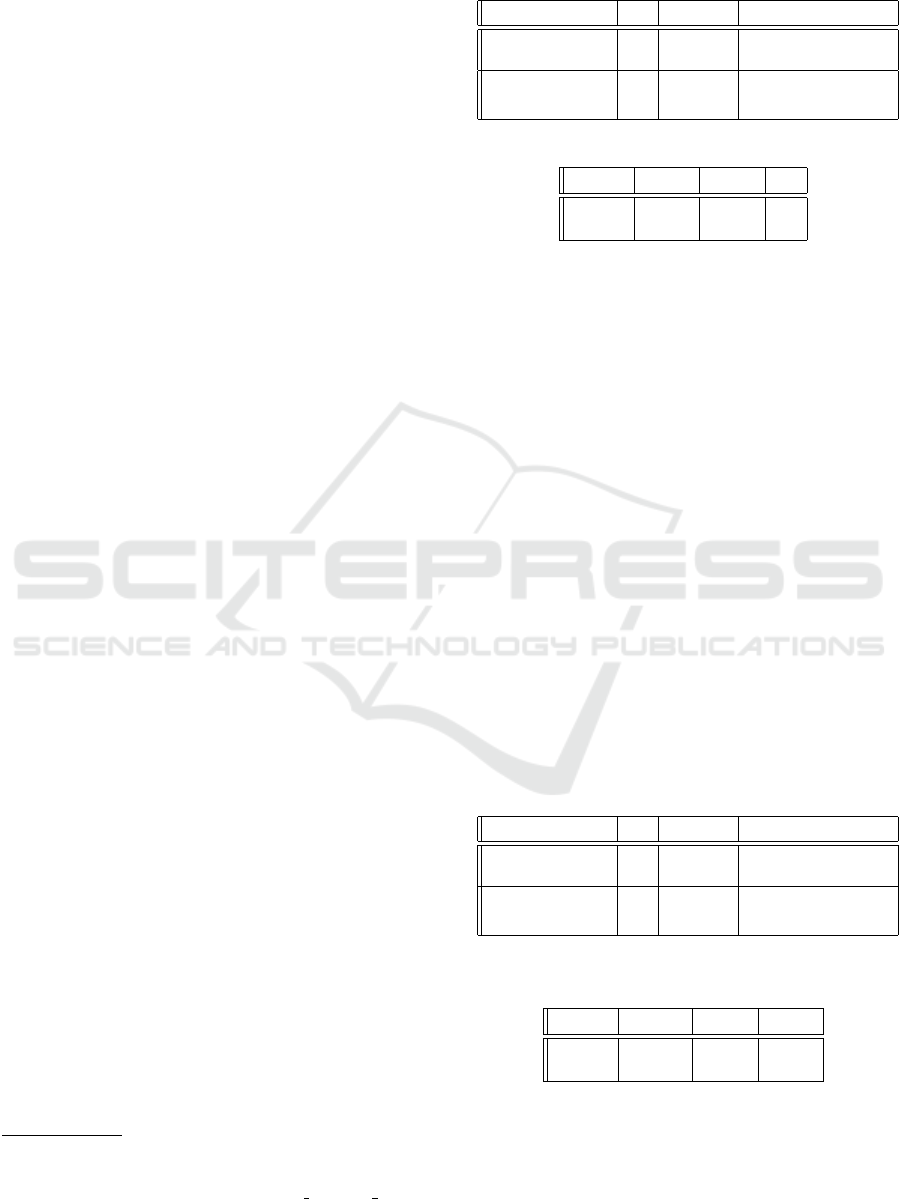
Table 2: Mean and standard deviation results of the learning
gain tests.
Group Name N Mean Standard Deviation
Experimental A 12 2.91667 0.99621
Experimental B 10 3.70000 1.251666
Control A 8 1.37500 0.51755
Control B 6 1.33333 0.516398
Table 3: Independent t-test results of the learning gain.
Group t p df
A 4.007 0.01 18
B 4.365 0.001 14
design part stating there is no difference in the learn-
ing gain between the experimental group (which used
the robot) and the control group (which used the tra-
ditional way of teaching), is rejected.
5.2 Engagement Level Test Results
The purpose of this test is to measure the level of
engagement the participants have in the experiment
while learning the different programming concepts.
The results are then compared to see which group has
a better engagement through an independent t-test as
shown in tables 4 and 5. The experimental group’s re-
sults (M = 3.43892 and SD = 0.304990) have proved
to be significantly higher than the control group’s (M
= 2.02250 and SD = 0.080422) along with the t-test
results (t = 12.737, p ≺ 0.05, df = 18).
These results reject the null hypothesis stating
there is no difference between the 2 groups concern-
ing the level of engagement (using the robot or learn-
ing with the traditional teaching method).
Table 4: Mean and standard deviation results of the engage-
ment level test.
Group Name N Mean Standard Deviation
Experimental A 12 3.43892 0.304990
Experimental B 10 3.28140 0.539064
Control A 8 2.02250 0.080422
Control B 6 2.38250 0.384743
Table 5: Independent t-test results of the engagement level
test.
Group t p df
A 12.737 0.000 18
B 3.556 0.003 0.003
5.3 System Usability Scale Results
In this part of testing, the usability of the robot as
well as the usability of the traditional method is eval-
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking
67

uated. Participants have to answer 10 questions stat-
ing if the system is easy to use and learn or not. The
results are then compared between the two different
groups (Experimental and Control Groups) through
an independent t-test as shown in tables 6 and 7.
The Experimental group’s results (M = 3.35000 and
SD = 0.274690) have been significantly higher than
the control group’s results (M = 2.08750 and SD =
0.394380) along with the t-test results (t = 9.471, p ≺
0.05, df = 18).
These results reject the null hypothesis stating
there is no difference between the 2 groups in terms
of system usability scale (using the robot or using the
traditional method of teaching).
Table 6: Mean and standard deviation results of the system
usability scale.
Group Name N Mean Standard Deviation
Experimental A 12 3.35000 0.274690
Experimental B 10 3.01000 0.372529
Control A 8 2.08750 0.394380
Control B 6 2.46667 0.344480
Table 7: Independent t-test results of the system usability
scale.
Group t p df
A 8.472 0.000 18
B 2.900 0.012 14
6 CONCLUSION
Throughout this work, we were trying to investigate
if integrating robots in the educational process for
teaching children coding principles has positive im-
pact. For this purpose, we designed and assembled
two interactive programmable robots through voice
commands. The first robot is programmed through
English commands, while the second one is pro-
grammed using Arabic commands. We tested the two
robots with a group of 36 children through online
meeting due to the Covid-19 and lockdown circum-
stances.
The results showed that integrating robots in the
educational process has a great impact on children.
The children’s engagement with the robot in the
learning process have given them an opportunity to
enhance their knowledge more about computational
thinking and programming which has facilitated the
learning process and made the experience more fun
for the children.
The main purpose of using an interactive robot
in this work is to teach young children between 7-
11 years old computational thinking and basic pro-
gramming concepts. They have learnt three major
programming concepts (sequential, conditional, iter-
ation) by using a robot in a maze game that targets
these concepts. The robot has a voice recognition fea-
ture that can easily be used by children to direct the
robot out of the maze by using the three different pro-
gramming approaches. This study proved that young
children can understand complex programming con-
cepts such as conditions and loops while mastering
the sequential part easily. The experiment has tested
36 participants divided into two groups one with the
English language and one with the Arabic language,
and each group was divided into 2 sub-groups one
of which has learnt the concepts by using the robot
to test the game while the other has learnt the con-
cepts by using the traditional methods by explaining
the concepts on a paper. The results of the learning
processes between the two groups have been com-
pared regarding the learning gain, engagement level
and system usability scale. To conclude, the group
that has used the robot has significantly better learn-
ing gain and better engagement level than the group
that has been taught by explaining the concepts on a
paper.
The empirical results reported herein should be
considered in the light of some limitations. The first
limitation concerns the testing part. The pronuncia-
tion of words for some kids was not correct, as they
speak English as a second language and some of them
are too young to fully pronounce words the right way.
Therefore, they have been asked to type the com-
mands instead of saying them, which took them some
time for typing correctly. A training period for correct
pronunciation of the commands might be better for
testing with the children before the real experiment.
However, in our opinion, although the English
words might have been a challenge for some of the
children, the results showed that both versions were
educationally effective. Thus, the concern might have
been that the English version would not be effective
compared to the Arabic one which did not turn out to
be the case. Thus, we believe that the system can also
be used to teach the children some English vocabu-
lary as a side effect. In the future, this should also be
considered while testing the system to not only test
the effectiveness of the system to teach computational
concepts but to also check its effectiveness on the En-
glish language vocabulary.
In the future, maze game should be developed to
be more challenging for children by adding more ob-
stacles inside. In addition, more sensors can be added
to the robot besides the ultrasonic one to expand the
range of movements and challenges.
CSEDU 2023 - 15th International Conference on Computer Supported Education
68

More programming concepts could also be added
to the robot, as it only has one specific case of ”if”
condition and no ”else” condition. More concepts to
be added are nested loops and nested ifs.
REFERENCES
AcapelaGroup (2009). Acapela arabic speech recog-
nizer and text-to-speech engine. http://www.acapela-
group.co.
Badamasi, Y. A. (2014). The working principle of an ar-
duino. In 2014 11th international conference on elec-
tronics, computer and computation (ICECCO), pages
1–4. IEEE.
Barai, S., Biswas, D., and Sau, B. (2017). Estimate dis-
tance measurement using nodemcu esp8266 based on
rssi technique. In 2017 IEEE Conference on Antenna
Measurements & Applications (CAMA), pages 170–
173. IEEE.
Carnegie Mellon University. Alice. https://www.alice.org/.
Last accessed 3 June 2018.
Constantinou, V. and Ioannou, A. (2020). Development of
Computational Thinking Skills through Educational
Robotics. CEUR-WS.org.
Denner, J., Campe, S., and Werner, L. (2019). Does com-
puter game design and programming benefit children?
a meta-synthesis of research. ACM Transactions on
Computing Education (TOCE), 19(3):1–35.
Edward, M., Karyono, K., and Meidia, H. (2017). Smart
fridge design using nodemcu and home server based
on raspberry pi 3. In 2017 4th International Con-
ference on New Media Studies (CONMEDIA), pages
148–151. IEEE.
Fessakis, G., Gouli, E., and Mavroudi, E. (2013). Problem
solving by 5–6 years old kindergarten children in a
computer programming environment: A case study.
Computers & Education, 63:87–97.
Han, J., Jo, M., Jones, V., and Jo, J. H. (2008). Compara-
tive Study on the Educational Use of Home Robots for
Children. Journal of Information Processing Systems,
Vol.4, No.4,.
Hsieh, Y., Su, M., Chen, S., Chen, G., and Lin, S. (2010).
A robot-based learning companion for storytelling.
In Proceedings of the 18th international conference
on computers in education. Asia-Pacific Society for
Computers in Education Putrajaya, Malaysia.
KALELIO
˘
GLU, F. and G
¨
ulbahar, Y. (2014). The effects of
teaching programming via scratch on problem solving
skills: A discussion from learners’ perspective. Infor-
matics in Education, 13(1).
Kazimoglu, C., Kiernan, M., Bacon, L., and Mackinnon,
L. (2012). A serious game for developing compu-
tational thinking and learning introductory computer
programming. Procedia-Social and Behavioural Sci-
ences, 47:1991–1999.
Kory, J. M. and Breazeal, C. (2014). Storytelling with
robots: Learning companions for preschool children’s
language development. In The 23rd IEEE Interna-
tional Symposium on Robot and Human Interactive
Communication, IEEE RO-MAN 2014, Edinburgh,
UK, August 25-29, 2014, pages 643–648. IEEE.
Magnenat, S., Riedo, F., Bonani, M., and Mondada, F.
(2012). A programming workshop using the robot
“thymio ii”: The effect on the understanding by chil-
dren. In 2012 IEEE Workshop on Advanced Robotics
and its Social Impacts (ARSO), pages 24–29. IEEE.
MIT Media Lab. Scratch. https://scratch.mit.edu/. Last
accessed 1 June 2018.
Mohamed, K., Dorgham, Y., and Sharaf, N. (2021).
Kodockly: Using a tangible robotic kit for teach-
ing programming. In Csap
´
o, B. and Uhomoibhi, J.,
editors, Proceedings of the 13th International Con-
ference on Computer Supported Education, CSEDU
2021, Online Streaming, April 23-25, 2021, Volume 1,
pages 137–147. SCITEPRESS.
Riek, L. D., Mavridis, N., Antali, S., Darmaki, N., Ahmed,
Z., Al-Neyadi, M., and Alketheri, A. (2010). Ibn sina
steps out: Exploring arabic attitudes toward humanoid
robots. In Proceedings of the 2nd international sym-
posium on new frontiers in human–robot interaction,
AISB, Leicester, volume 1.
Robins, B., Dautenhahn, K., te Boekhorst, I. R. J. A., and
Billard, A. (2005). Robotic assistants in therapy and
education of children with autism: can a small hu-
manoid robot help encourage social interaction skills?
Univers. Access Inf. Soc., 4(2):105–120.
Rogalla, O., Ehrenmann, M., Zollner, R., Becher, R., and
Dillmann, R. (2002). Using gesture and speech con-
trol for commanding a robot assistant. In Proceedings.
11th IEEE International Workshop on Robot and Hu-
man Interactive Communication, pages 454–459.
Vaucelle, C. and Jehan, T. (2002). Dolltalk: a computa-
tional toy to enhance children’s creativity. In Terveen,
L. G. and Wixon, D. R., editors, Extended abstracts
of the 2002 Conference on Human Factors in Com-
puting Systems, CHI 2002, Minneapolis, Minnesota,
USA, April 20-25, 2002, pages 776–777. ACM.
Wu, E. H.-K., Wu, H. C.-Y., Chiang, Y.-K., Hsieh, Y.-C.,
Chiu, J.-C., and Peng, K.-R. (2008). A context aware
interactive robot educational platform. In 2008 Sec-
ond IEEE International Conference on Digital Game
and Intelligent Toy Enhanced Learning, pages 205–
206.
Wyeth, P. and Purchase, H. C. (2002). Tangible program-
ming elements for young children. In Terveen, L. G.
and Wixon, D. R., editors, Extended abstracts of the
2002 Conference on Human Factors in Computing
Systems, CHI 2002, Minneapolis, Minnesota, USA,
April 20-25, 2002, pages 774–775. ACM.
Talk-to-the-Robot: Speech-Interactive Robot To Teach Children Computational Thinking
69
