
An Anisotropic and Asymmetric Causal Filtering Based Corner
Detection Method
Ghulam Sakhi Shokouh
a
, Philippe Montesinos
b
and Baptiste Magnier
c
EuroMov Digital Health in Motion, Univ. Montpellier, IMT Mines Ales, Ales, France
Keywords:
Causal Filter, Anisotropic Filtering, Asymmetric Diffusion, Corner Detection.
Abstract:
An asymmetric-anisotropic causal diffusion filtering-based curvature operator is proposed in this communica-
tion. The new corner operator produces optimal results on small structures, such as, corners at pixel level and
also sub-pixel level precision. Meanwhile, this method is robust against noises due to its asymmetric diffusion
scheme. Experiments have been performed on a set of both synthetic and real images. The obtained results are
promising and better without any ambiguity as compared with the two referenced corner operators, namely
Kitchen Rosenfeld and Harris corner detector.
1 INTRODUCTION
The importance and interest in keypoint detection (i.e,
corner or junction as a stable interest point) in a digital
image lies notably in its application in image match-
ing, tracking, motion estimation, panoramic stitching,
object recognition, and 3D reconstruction (Schmid
et al., 2010). The reason for the corner detection’s
wide range of applications is that the corner is eas-
ier to localize than other low-level features such as
edges or lines, particularly taking into consideration
the correspondence problems (e.g., aperture problem
in matching). There are many corner detection tech-
niques based on classic handcrafted (Shokouh et al.,
2023) and deep learning methods (Wang et al., 2019).
Deep learning-based techniques are more automatic,
however, considering the accuracy and precision for
the detection of small structures, such as corners,
keypoints, etc., they do not generally present higher
performance (highly depends on the dataset quality,
and annotation which is not easy for small struc-
tures). We argue that handcrafted techniques are still
widely used, particularly for optimization purposes,
either independently or integrated into the prepro-
cessing or post-processing stages of machine learn-
ing based higher-level computer vision applications
(Junfeng et al., 2022). One of the example of com-
puter vision application that its performance directly
a
https://orcid.org/0000−0003−2561−7317
b
https://orcid.org/0000−0003−3741−8702
c
https://orcid.org/0000−0003−3458−0552
depends on the precision and accuracy of keypoint de-
tection is 3D reconstruction. Additionally, among the
classic handcrafted corner detection techniques, the
two corner detection operators Kitchen and Rosen-
feld (Kitchen and Rosenfeld, 1982), and Harris (Har-
ris and Stephens, 1988), are the main method used
for the comparison and benchmarking. Moreover,
Causal filtering has proven its efficiency in many
segmentation domains, such as edge or line detec-
tion. In this contribution, we are presenting a new
segmentation method for corner detection based on
asymmetric anisotropic diffusion filtering. The ba-
sic idea is inspired from a curvature-like operator
similar to the Kitchen-Rosenfeld operator, but imple-
mented through an asymmetric diffusion scheme us-
ing an anisotropic causal filter. Finally, we have com-
pared the experimental result of our operator with the
Kitchen and Rosen- feld, and Harris, the visual re-
sult presented higher precision for both pixel level and
sub-pixel level. The structure of this paper consists
of related works in the subsequent section, followed
by the proposed methods and the obtained result, and
eventually, the conclusion is presented.
2 RELATED WORKS
Considering a curve traced on the image plane, the
curvature is defined as
dθ
ds
where θ is the tangent to the
curve and s the curvilinear coordinate along the curve.
As an image, I(x, y) is a Cartesian parametrized sur-
92
Shokouh, G., Montesinos, P. and Magnier, B.
An Anisotropic and Asymmetric Causal Filtering Based Corner Detection Method.
DOI: 10.5220/0011855600003497
In Proceedings of the 3rd International Conference on Image Processing and Vision Engineering (IMPROVE 2023), pages 92-99
ISBN: 978-989-758-642-2; ISSN: 2795-4943
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

face as Eq. 1:
z = I(x y) (1)
An image can then be considered also as a set of
isophotes lines, at each pixel, there is in isophote line
going through this pixel. We can then define the dense
(at each pixel) the curvature of isophote lines in an
image is Eq. 2:
dθ
ds
=
I
2
y
I
xx
− 2I
x
I
y
I
xy
+ I
2
x
I
yy
(I
2
x
+ I
2
y
)
3
2
(2)
This operator is the basis of the well-known corner
operator ”Kitchen-Rosenfeld” (Kitchen and Rosen-
feld, 1982) which is formed by the multiplication of
the curvature of isophotes lines and the norm of the
gradient. This formula means that a corner point must
be an edge point with a strong curvature. Then the Eq.
3:
KR =
I
2
y
I
xx
− 2I
x
I
y
I
xy
+ I
2
x
I
yy
(I
2
x
+ I
2
y
)
2
(3)
It is also well-known that the Laplacian operator ap-
plied to an image can be written as Eq. 4:
∆I =
I
2
y
I
xx
− 2I
x
I
y
I
xy
+ I
2
x
I
yy
(I
2
x
+ I
2
y
)
2
+
I
2
x
I
xx
+ 2I
x
I
y
I
xy
+ I
2
y
I
yy
(I
2
x
+ I
2
y
)
2
(4)
Then as Eq. 5 :
∆I = I
xx
+ I
yy
= I
ξξ
+ I
ηη
(5)
It comes that I
ξξ
is the second derivative of the image
along the direction of the isophote ξ and I
ηη
is the
second derivative of the image along the direction of
the gradient η. As evidence, KR is equivalent to I
ξξ
.
The Harris and Stephen (Harris and Stephens, 1988)
proposed corner operator based on the structure tensor
as Eq. 6;
T =
(I
2
x
) ∗ G
σ
s
(I
x
I
y
) ∗ G
σ
s
(I
x
I
y
) ∗ G
σ
s
(I
2
y
) ∗ G
σ
s
(6)
This structure tensor obtained from gradient tensor
represents the local auto-correlation of the image sig-
nal. I
x
and Y
y
are image derivatives along respectively
X and Y axis. They are obtained using a Gaussian
derivative filter with a σ
d
standard-deviation.
G
σ
s
is a Gaussian smoothing filter with a σ
s
standard-
deviation.
Then the Harris operator is obtained from this tensor
as Eq. 7:
H = Det(T ) − k · Trace(T)
2
(7)
• The determinant is the product of eigen values, it
is strong when both eigen values are strong.
• The trace is the sum of eigen values and is strong
at edges.
• The parameter k has been determined empirically
to do a balance between corners and edges. k is
generally set to 0.04.
2.1 Diffusion Scheme
There are two important diffusion schemes.
• The Euclidean linear scale space :
This diffusion scheme is described by the Heat
equation, whose solution is a convolution of
the original image with a Gaussian. Then the
Kitchen-Rosenfeld operator can be seen as the
curvature multiplied by the gradient at a certain
level of diffusion.
• The Euclidean morphological scale space :
This non-linear scale-space is obtained by apply-
ing the Mean Curvature Motion (MCM) scheme
(Franke et al., 1996) Eq. 8.
I(0, x, y) = I
0
(x, y)
∂I
∂t
(t, x, y) = I
ξξ
(t, x, y)
(8)
Where ξ still represent the tangent to isophotes.
When iterating this scheme, isophote lines are
moving in function of their Euclidean curvature.
The Fig. 1 illustrates this property. If iterations
goes on, the rectangle will be changed to a circle
of decreasing radius.
(a) Initial image (b) MCM diffusion
Figure 1: MCM behavior. a) initial image, b) result of
MCM diffusion (100 iterations).
It is clear that such diffusion schemes are moving in
the corners as well as Gaussian scale space. In both
schemes, the I
ξξ
term is present.
3 PROPOSED METHOD
In this study we have used a completely different
scheme based on asymmetric diffusion ((Montesinos
and Magnier, 2017)) which corresponds exactly to our
An Anisotropic and Asymmetric Causal Filtering Based Corner Detection Method
93

needs of detecting corners precisely. Then we are go-
ing to show that one curvature-like measure that is
used to drive the numerical scheme provides a better
alternative to the I
ξξ
operator for corner detection.
3.1 An Asymmetric Diffusion Scheme
At each pixel P, five distinct directions are defined:
• ξ
1
and ξ
2
are the direction defined by the appli-
cation of a bank of first derivative causal filters.
These directions are the direction given by the
smoothing component of the filter giving the ex-
ternal response (ξ
1
corresponds to the maximal
positive response, ξ
2
to the minimal negative one).
• ξ is the orientation of the tangent to the isophote.
This orientation is computed using ξ
1
and ξ
2
.
• ξ
1r
and ξ
2r
are the mirrored orientations of ξ
1
and
ξ
2
by the axis ξ (See Fig. 2a)).
This scheme can then be written as Eq. 9:
I(0, x, y) = I
0
(x, y) ← initial image
∂I
∂t
(t, x, y) = I
ˆ
ξ
1
ˆ
ξ
2
(t, x, y) = arg min
I
ξ
1
ξ
2
, I
ξ
1r
ξ
2r
, I
ξξ
|x |
(9)
This scheme has a geometrical interpretation, illus-
trated at the Fig. 2. We have already seen that ori-
entations ξ
1
and ξ
2
are influenced by the presence of
edges, then at each pixel, we are searching for the di-
rections that are the less influenced by edges in order
to preserve these edges at most as possible by asym-
metric diffusion. The diffusion will be achieved along
ξ, along ξ
1
and ξ
2
, or along ξ
1r
and ξ
2r
, in respect to
the minimum absolute value of the asymmetric sec-
ond derivative of the image. In the configuration of
Fig 2b), or Fig. 2c) the diffusion is applied in the
direction ξ
1r
and ξ
2r
, preserving the edges. On the
configuration of Fig. 2a), the pixel under considera-
tion is located on an edge, the diffusion may be either
along ξ
1
and ξ
2
or simply along, ξ depending on the
local curvature. For this scheme, the only parameter
is the number of iterations.
For regularizing the input image, we just proceed
to several iterations of this asymmetric scheme (in
general, 100 iterations give good results). The Fig.
3 presents results of regularization obtained on the
“rectangle image” a), 3b) presents results obtained
with 100 iterations, 200 iterations at c) and 500 it-
erations at d). As we can see, corners are not affected
even with a high number of iterations.
3.2 Asymmetric Curvature
This scheme uses three curvature-like expressions to
perform the diffusion :
• |I
ξ
1
ξ
2
| :
a corner point is first an edge point with a small-
est value of |I
ξ
1
ξ
2
| under a certain neighborhood
because ξ
1
and ξ
2
are both directions of isophotes
then, at the corner point location, the three gray-
levels involved in |I
ξ
1
ξ
2
| are similar.
• |I
ξξ
| :
this measure is similar to the Kitchen-Rosenfeld
measure (direction ξ may be somewhat different
because filters involved are different) estimated
locally in a 3 × 3 window. This measure is suit-
able but not optimal, the next measure will be pre-
ferred.
• |I
ξ
1r
ξ
2r
| :
this measure is maximized since the directions,
ξ
1r
and ξ
2r
indicates the directions where gray-
levels are the most different from the considered
pixel. For this reason, the response obtained is
less noisy than the one obtained with the preced-
ing measure.
Then, for characterizing the curvature at corner
points, we have chosen to use the expression |I
ξ
1r
ξ
2r
|
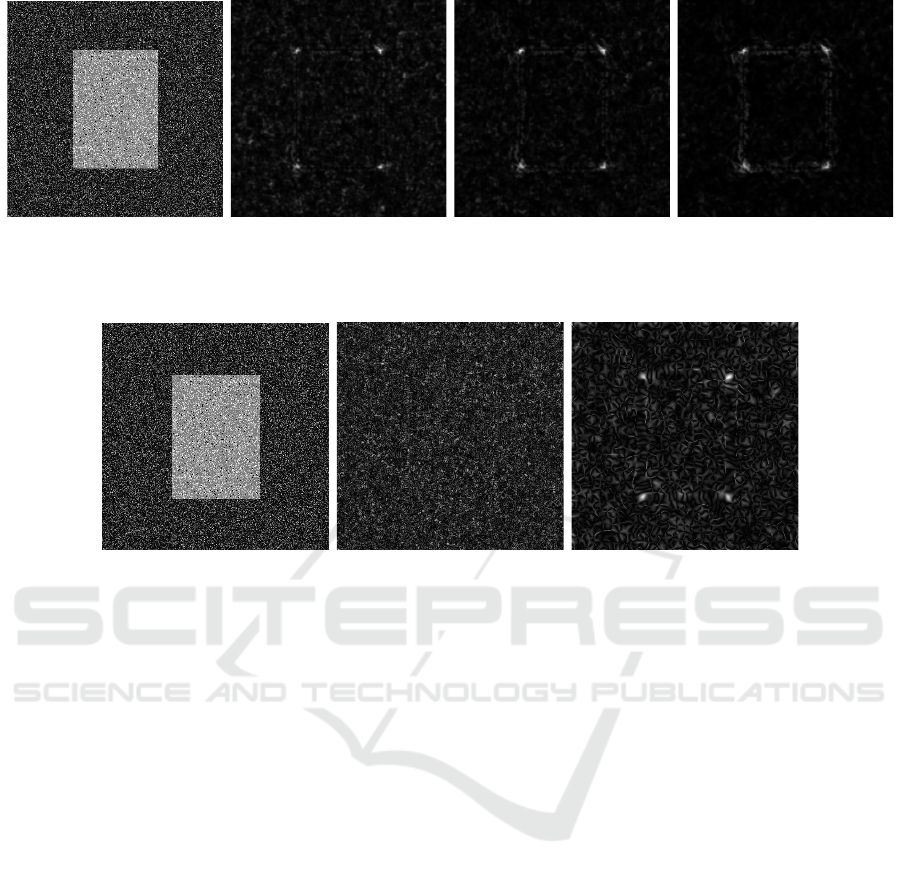
that best characterizes the corners. The Fig. 4
presents the three asymmetric curvature results ob-
tained after 100 iterations. As explained beforehand,
the |I
ξ
1
ξ
2
| (Fig. 4a)) gives 2 responses at each side of
corners. This measure is minimum at corner points,
for this reason it will be complicated to use such mea-
sure to characterize correctly corners. The |I
ξξ
| (Fig.
4b)) is similar to a Kitchen Rosenfeld measure, the
response is overall noisy and edges are also respond-
ing. Finally, the | I
ξ
1r
ξ
2r
| (Fig. 4c) measure gives the
best information able to characterize reliably the cor-
ner points.
3.3 Corner Detection Using | I
ξ
1r
ξ
2r
|
The complete algorithm for asymmetric corner detec-
tion is summarized as follows :
1. Depending on the precision needed, magnify or
not the initial image ((Montesinos and Datteny,
1997)) using a very small Gaussian standard-
deviation (σ ≃ 0.6), apply several iterations (in
general 10) of a heat inverse equation scheme then
apply several iterations (in general 4) of a shock
filter ((Osher and Rudin, 1990)).
2. Apply several iterations of the asymmetric
scheme (in general 100).
3. Compute the |I
ξ
1r
ξ
2r
| image after the regulariza-
tion.
4. Compute the local maxima of the |I
ξ
1r
ξ
2r
| for ex-
ample in a circular window (generally with a ra-
dius of 2 pixels multiplied by the precision).
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
94

a)
P
b)
P
c)
edge edge
edge
ξ
1
ξ
ξ
2
ξ
1r
ξ
2r
ξ
1
ξ
2
ξ
ξ
1r
ξ
2r
ξ
1
ξ
ξ
2
ξ
1r
ξ
2r
Figure 7: Causal orientations.
a) b) c) d)
Figure 8: Asymetric regularization. a) initial image, b) asymetric regularization 100 iterations, c) asymetric
regulariz a tio n 200 iterations, d) asymetric regularization 500 iterat ions .
3.1.3 Asymetric curvature
This scheme uses three curvatur e -li ke expressions to perform the diffusion :
• |I
ξ
1
ξ
2
|:
a corner point is first an edge point with a smallest value of |I
ξ
1
ξ
2
| u n de r a cer tain neighborh ood because
ξ
1
and ξ
2
are both directions of isophotes then, at the corner point location, the three grey levels involved
in |I
ξ
1
ξ
2
| are similar.
• |I
ξξ
|:
this measure is similar to th e Kitchen-Rosenfeld measure (direction ξ may be somewhat different because
filters involved are different) estimated locally in a 3×3 window. This measure is suitable but not optimal,
next measure will be prefered.
• |I
ξ
1r
ξ
2r
|:
this measure is maximized since the dire cti ons ξ
1r
and ξ
2r
indicates the directions where grey levels are
the most different from the considered pixel. For this reason the re s ponse obtained is less noisy that the
one obtained with the preceding measure.
Then f or characterizing the curvature at corner points, we have choosen to use the expression |I
ξ
1r
ξ
2r
| t hat
best characterizes the corners. The figure 9 presents the three asymetric curvature results obtained after 100
iterations. As explained precedently the |I
ξ
1
ξ
2
| (figure 9a)) gives 2 responses at each side of corners. This
measure is minimum at corner points, for this reason it will be complicated to use such measure to characterize
correctly corners. The |I
ξξ
| (figure 9b)) is similar to a Kitchen r os en fakd mesure, the response is averall noisy
and edges are also responding.
Finally the |I
ξ
1r
ξ
2r
| (figur e 9c)) measure gives the best information able to characterize reliably the corner
points.
16
a)
P
b)
P
c)
edge edge
edge
ξ
1
ξ
ξ
2
ξ
1r
ξ
2r
ξ
1
ξ
2
ξ
ξ
1r
ξ
2r
ξ
1
ξ
ξ
2
ξ
1r
ξ
2r
Figure 7: Causal orientations.
a) b) c) d)
Figure 8: Asymetric regularization. a) initial image, b) asymetric regularization 100 iterations, c) asymetric
regulariz a tio n 200 iterations, d) asymetric regularization 500 iterat ions .
3.1.3 Asymetric curvature
This scheme uses three curvatur e -li ke expressions to perform the diffusion :
• |I
ξ
1
ξ
2
|:
a corner point is first an edge point with a smallest value of |I
ξ
1
ξ
2
| u n de r a cer tain neighborh ood because
ξ
1
and ξ
2
are both directions of isophotes then, at the corner point location, the three grey levels involved
in |I
ξ
1
ξ
2
| are similar.
• |I
ξξ
|:
this measure is similar to th e Kitchen-Rosenfeld measure (direction ξ may be somewhat different because
filters involved are different) estimated locally in a 3×3 window. This measure is suitable but not optimal,
next measure will be prefered.
• |I
ξ
1r
ξ
2r
|:
this measure is maximized since the dire cti ons ξ
1r
and ξ
2r
indicates the directions where grey levels are
the most different from the considered pixel. For this reason the re s ponse obtained is less noisy that the
one obtained with the preceding measure.
Then f or characterizing the curvature at corner points, we have choosen to use the expression |I
ξ
1r
ξ
2r
| t hat
best characterizes the corners. The figure 9 presents the three asymetric curvature results obtained after 100
iterations. As explained precedently the |I
ξ
1
ξ
2
| (figure 9a)) gives 2 responses at each side of corners. This
measure is minimum at corner points, for this reason it will be complicated to use such measure to characterize
correctly corners. The |I
ξξ
| (figure 9b)) is similar to a Kitchen r os en fakd mesure, the response is averall noisy
and edges are also responding.
Finally the |I
ξ
1r
ξ
2r
| (figur e 9c)) measure gives the best information able to characterize reliably the corner
points.
16
a)
P
b)
P
c)
edge edge
edge
ξ
1
ξ
ξ
2
ξ
1r
ξ
2r
ξ
1
ξ
2
ξ
ξ
1r
ξ
2r
ξ
1
ξ
ξ
2
ξ
1r
ξ
2r
Figure 7: Causal orientations.
a) b) c) d)
Figure 8: Asymetric regularization. a) initial image, b) asymetric regularization 100 iterations, c) asymetric
regulariz a tio n 200 iterations, d) asymetric regularization 500 iterat ions .
3.1.3 Asymetric curvature
This scheme uses three curvatur e -li ke expressions to perform the diffusion :
• |I
ξ
1
ξ
2
|:
a corner point is first an edge point with a smallest value of |I
ξ
1
ξ
2
| u n de r a cer tain neighborh ood because
ξ
1
and ξ
2
are both directions of isophotes then, at the corner point location, the three grey levels involved
in |I
ξ
1
ξ
2
| are similar.
• |I
ξξ
|:
this measure is similar to th e Kitchen-Rosenfeld measure (direction ξ may be somewhat different because
filters involved are different) estimated locally in a 3×3 window. This measure is suitable but not optimal,
next measure will be prefered.
• |I
ξ
1r
ξ
2r
|:
this measure is maximized since the dire cti ons ξ
1r
and ξ
2r
indicates the directions where grey levels are
the most different from the considered pixel. For this reason the re s ponse obtained is less noisy that the
one obtained with the preceding measure.
Then f or characterizing the curvature at corner points, we have choosen to use the expression |I
ξ
1r
ξ
2r
| t hat
best characterizes the corners. The figure 9 presents the three asymetric curvature results obtained after 100
iterations. As explained precedently the |I
ξ
1
ξ
2
| (figure 9a)) gives 2 responses at each side of corners. This
measure is minimum at corner points, for this reason it will be complicated to use such measure to characterize
correctly corners. The |I
ξξ
| (figure 9b)) is similar to a Kitchen r os en fakd mesure, the response is averall noisy
and edges are also responding.
Finally the |I
ξ
1r
ξ
2r
| (figur e 9c)) measure gives the best information able to characterize reliably the corner
points.
16
(a) Pixel located on an edge (b) Pixel located outside edge (c) Pixel located inside edge
Figure 2: Causal Orientation. a) The pixel is located on an edge, the diffusion may be either along ξ
1
and ξ
2
, b) Pixel is
outside edge and the diffusion is applied in the direction ξ
1r
and ξ
2r
, preserving the edges, c) Pixel is inside edge and the
diffusion is applied in the direction ξ
1r
and ξ
2r
, preserving the edges.
(a) Initial image (b) Regularization 100 iterations (c) Regularization 200 iterations (d) Regularization 500 iterations
Figure 3: Asymmetric regularization. a) initial image, b) asymmetric regularization 100 iterations, c) asymmetric regulariza-
tion 200 iterations, d) asymmetric regularization 500 iterations.
(a) |I
ξ
1
ξ
2
| (b) |I
ξξ
| (c) |I
ξ
1r
ξ
2r
|
(d) Original image (e) |I
ξ
1
ξ
2
| measures (f) |I
ξξ
| measures (g) |I
ξ
1r
ξ
2r
| measures
Figure 4: Anisotropic curvature measures obtained after 100 iterations. a) | I
ξ
1
ξ
2
|, b) | I
ξξ
|, c) | I
ξ
1r
ξ
2r
|. d), e), f), g) Details in
the upper left corner (d) original image) e, f, g) respectively |I
ξ
1
ξ
2
|, |I
ξξ
|, and |I
ξ
1r
ξ
2r
| measures.
An Anisotropic and Asymmetric Causal Filtering Based Corner Detection Method
95
(a) Original image (b) |I
ξ
1r
ξ
2r
| at 100 iterations (c) |I
ξ
1r
ξ
2r
| at 200 iterations (d) |I
ξ
1r
ξ
2r
| at 500 iterations
Figure 5: Asymmetric curvature | I
ξ
1r
ξ
2r
| on image ”rectangle”. a) original image, b) |I
ξ
1r
ξ
2r
| at 100 iterations, c) |I
ξ
1r
ξ
2r
| at
200 iterations, d) |I
ξ
1r
ξ
2r
| at 500 iterations.
(a) Original image (b) Kitchen-Rosenfeld (σ = 1) (c)Kitchen-Rosenfeld (σ = 3)
Figure 6: Kitchen-Rosenfeld operator on image ”rectangle”. a) original image, b) Kitchen-Rosenfeld (σ = 1) regularization is
not enough to obtain reliable curvature, c) Kitchen-Rosenfeld (σ = 3) curvature appears, but noise is still present and strong.
4 RESULT
The Fig.5 presents the | I
ξ
1r
ξ
2r
| operator results ob-
tained on the “rectangle” image at simple pixel pre-
cision, after varying number of iterations (100, 200,
500). As iterations go on, the noise is filtered.
For comparison, the Fig. 6 presents the Kitchen-
Rosenfeld operator results obtained with a Gaussian
standard-deviation σ = 1 and σ = 3. The Kitchen-
Rosenfeld operator gives noisy results. When com-
puted with a Gaussian filter having a parameter σ
equal to 1 the results obtained are generally too noisy
to obtain interesting results (Fig. 6b)). If the parame-
ter σ increases, it is possible to obtain a more reliable
information, but local maxima are moving (Fig. 6c)).
Finally, the Fig. 7 present results obtained by local
maxima extraction for all operators : Harris (σ = 1),
Kitchen-Rosenfeld (σ = 3) and |I
ξ
1r
ξ
2r
| with 100, 200
and 500 iterations. As discussed beforehand, Harris
and Kitchen-Rosenfeld give noisy results. Moreover,
for Kitchen-Rosenfeld, corners are often detected at
a distance greater than 2 pixels from the true loca-
tion. Increasing the Gaussian parameter σ improves
the curvature SNR (signal-to-noise ratio), but preci-
sion of corner localization decreases. Concerning the
|I
ξ
1r
ξ
2r
| operator, the response is less noisy, and the
precision seems better than Harris (around 1 pixel
from the true corner locations).
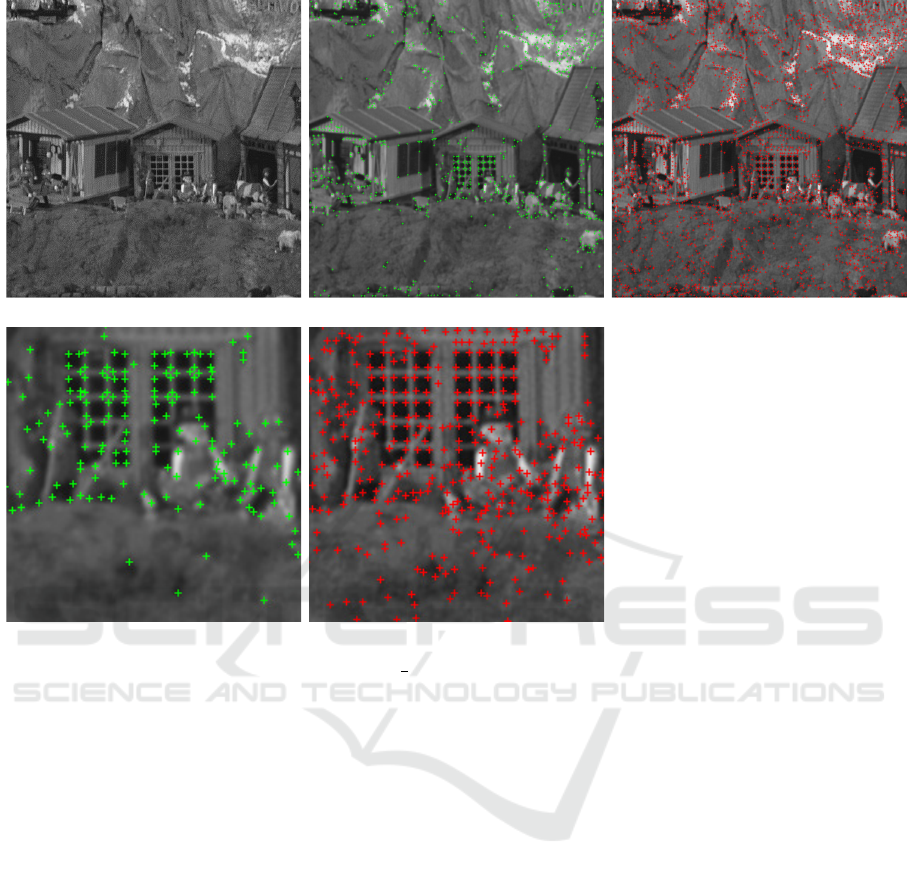
The Fig. 8 compares the Harris operator and the
anisotropic curvature operator on the ”inria” image :
a) shows the initial image, b) presents regularization
results (100 iterations) and c) presents the |I
ξ
1r
ξ
2r
|
operator result. The Fig. 8 b) and c) show respec-
tively the results of the Harris corner detector and the
|I
ξ
1r
ξ
2r
| corner detection. Then the Fig. 8 d) present
4 manually corner selection and the results obtained
with both operators are going to be detailed in Fig. 8
e). For the Fig. 8 e), for those corner angle which is
less or equal to 90
◦
, the new operator performs bet-
ter than Harris, and for those corner angle which is
108
◦
(angle is wider) the results are similar. But if
angle value increases Harris completely lost the cor-
ner point, The new operator still performs correctly
(see the wide angles of the black carpet corners on
the floor).
4.1 Sub-pixel Precision
The Fig. 9 compares Harris corner detector (thresh-
old=0.001) and | I
ξ
1r
ξ
2r
| corner detection (thresh-
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
96

(a) Original image (b) Harris (c) Kitchen-Rosenfeld
(d) Anisotropic (100 iteration) (e) Anisotropic (200 iteration) (f) Anisotropic (500 iteration)
Figure 7: Corner detection. a) Harris corner detector (threshold = 0.1), b) Kitchen-Rosenfeld corner detector (σ = 3, thresh-
old=0.3), c) Anisotropic corner detector (100 iterations, threshold = 0.3), d) Anisotropic corner detector (200 iterations,
threshold = 0.3), e) Anisotropic corner detector (500 iterations, threshold = 0.3.
old=0.05) at pixel precision. We are interested here
on the results obtained on the small windows of the
central house (windows size is around 5 × 5 pixels).
Harris operator (Fig. 9 b)) gives many responses on
the windows, but the points detected are often on the
windows frame rather than the corner. For the |I
ξ
1r
ξ
2r
|
(Fig. 9 c)) corner detection, the detected point is more
often at the corner. On the large, dark windows of the
left house, Harris performs better.
The Fig. 10 present results obtained at preci-
sion=2 (
1
2
pixel). In 10 a) are presented the sub-pixel
(
1
2
pixel) Harris corner detector, and in 10 b) are pre-
sented the sub-pixel (
1
2
pixel) |I
ξ
1r
ξ
2r
| corner detector.
The Fig. 10 c) and d) present the details only a region
of interest 200 × 200 on the windows of the central
house (c) Harris, d) |I
ξ
1r
ξ
2r
|.
5 CONCLUSIONS
This paper presents an asymmetric diffusion-based
anisotropic causal corner operator. The proposed
approach presented higher precision and accuracy
than the compared well-known corner detectors, such
as Kitchen Rosenfeld and Harris and Stephen tech-
niques, which are known as a reference benchmarks.
Meanwhile, to better regularize the image and im-
prove the robustness against noises, an asymmetric
diffusion scheme is used. The experimental results
on synthetic images and real images, both on pixel
and subpixel precision, validate visually the perfor-
mance of our method. This work can particularly
contribute to applications that require keypoint detec-
tion with higher precision, such as 3D reconstruction
(Peng et al., 2009), object detection, etc. Correspond-
ingly, as the outlook of this work will be to examine
this technique for the 3D reconstruction and then pur-
sue an objective evaluation (Shokouh et al., 2023).
REFERENCES
Franke, T., Neumann, H., and Seydel, R. (1996).
Anisotropic diffusion based on mean curvature mo-
tion: A computational study. In J
¨
ahne, B., Geißler, P.,
Haußecker, H., and Hering, F., editors, Mustererken-
nung 1996, pages 47–54, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Harris, C. G. and Stephens, M. J. (1988). A combined cor-
ner and edge detector. In Alvey Vision Conference,
pages 147–151.
Junfeng, J., Shenjuan, L., Gang, W., Weichuan, Z., and
Changming, S. (2022). Recent advances on image
edge detection: A comprehensive review. Neurocom-
puting.
An Anisotropic and Asymmetric Causal Filtering Based Corner Detection Method
97

(a) Original image (b) Harris (c) Proposed anisotropic
(d) Corner locations highlighted (e) Corner (424, 390),(209, 112), (140, 355) of d
Figure 8: Corner detection on the image ”inria”. a) Original image, b) Harris corner detection operator (threshold = 0.001)
, c) Anisotropic corner detection operator (threshold = 0.1). d) Few detected corner highlighted. e) Comparative corner
precision at location(424, 390),(209, 112), (140, 355) highlighted in d).
(a) Initial image (b) Harris (c) Proposed anisotropic
Figure 9: Corner detection image ”toys”, pixel precision. a) initial image. b) Harris corner detector (threshold = 0.001), c)
Anisotropic corner detector (threshold = 0.05).
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
98
(a) Original image (b) Harris (c) Proposed anisotropic
(d) Harris (window details) (e) Proposed (window details)
Figure 10: Corner detection image ”toys”, precision =
1
2
pixel. a) Harris corner detector (threshold = 0.001), b) Anisotropic
corner detector (threshold = 0.05), c) Harris corner detector (window details), d) Anisotropic corner detector (window details).
Kitchen, L. and Rosenfeld, A. (1982). Gray-level corner
detection. Pattern Recognit. Letters, 1:95–102.
Montesinos, P. and Datteny, S. (1997). Sub-pixel accuracy
using recursive filtering. In Scandinavian Conference
on Image Analysis.
Montesinos, P. and Magnier, B. (2017). Des filtres
anisotropes causaux pour une diffusion non con-
trolled. In GRETSI.
Osher, S. and Rudin, L. (1990). Feature-oriented image en-
hancement using shock filter. In SIAM Journal of Nu-
merical Analysis.
Peng, K., Chen, X., Zhou, D., and Liu, Y. (2009). 3d re-
construction based on sift and harris feature points. In
2009 IEEE International Conference on Robotics and
Biomimetics (ROBIO), pages 960–964.
Schmid, C., Mohr, R., and Bauckhage, C. (2010). Evalua-
tion of interest point detectors. IJCV, 37:151–172.
Shokouh, G.-S., Montesinos, P., and Magnier, B. (2023).
Repeatability evaluation of keypoint detection tech-
niques in tracking underwater video frames. In
CVAUI, to appear. Springer Berlin Heidelberg.
Wang, L., Han, K., and Sun, H. (2019). An adap-
tive corner detection method based on deep learning.
In 2019 Chinese Control Conference (CCC), pages
8478–8482.
An Anisotropic and Asymmetric Causal Filtering Based Corner Detection Method
99
