
Mobile Robot Navigation Strategies Through Behavioral Cloning and
Generative Adversarial Imitation Learning
Kevin Levrone Rodrigues Machado Silva and Rodrigo Calvo
Department of Computer Science, State University of Maringa,
5790 Colombo Avenue, 87020-900, Maringa-PR, Brazil
Keywords:
Autonomous Robots, Mobile Robots, Behavioral Cloning, Generative Adversarial Imitation Learning,
GAIL, Supervised Imitation Learning, Robot Navigation, Braitenberg Vehicles, Machine Learning, Inverse
Reinforcement Learning, Imitation Learning.
Abstract:
The conception of robots able to navigate autonomously through several environments remains one of the main
challenges to be overcome in the robotics research. The wide use of machine learning techniques as imitation
learning has obtained efficient performance in this research field. The autonomous navigation is essential to
carry out many kinds of task, which it can reduce the time and computational cust. One of the mechanisms
to a robot be autonomous is observe the behavior of the other. Therefore, it is proposed in this research
the development of a strategy of navigation based on Generative Adversarial Imitation Learning (GAIL) for
the learning of the navigational behaviors of distinct mobile robots with different locomotion strategies. The
CoppeliaSim simulator is used to build virtual scenarios and execute experiments to gather samples for the
strategy training. Another strategy will be developed based on the behavioral cloning, which will also be
trained in some environments with the same samples used in GAIL. Regression error metrics in addition with
the comparison of the paths generated by the strategies in each scenario will be considered as evaluation
methods. The obtained results are then discussed along with the potential future works.
1 INTRODUCTION
In a navigation system, the achievement of com-
plete autonomy by agents remains one of the main
challenges to be overcome in the study branches of
robotics and automobiles. In this context, machine
learning techniques have relevant role in the genera-
tion of autonomous agents. The most traditional tech-
niques are based on Reinforcement Learning (RL)
and Imitation Learning (IL) and found in the litera-
ture.
The GAIL was proposed in (Ho and Ermon, 2016)
as an approach that uses concepts from Generative
Adversarial Networks (GAN) coupled with the princi-
ples of Inverse Reinforcement Learning (IRL) to en-
able the extraction of an optimal policy through be-
havioral demonstrations that would come from an ex-
pert agent and then input to the training stage.
Although approaches using GAIL got successful
results to imitate behaviors of an expert, a wide re-
search regards that issue is recent in order to repro-
duce the navigational behavior of a mobile robot. Fol-
lowing this trend, the proposal of this project includes
the development of a GAIL-based navigation strategy
that could learn and reproduce the behaviors demon-
strated by two different models of land mobile robots,
where each of them will use a different navigation ap-
proach that will be applied in several environments.
Another strategy based on BC will be developed
to compare its performance and the GAIL-based strat-
egy performance. The BC–based strategy is also able
to learn the behaviors demonstrated by agents in the
same proposed environment. In addition, it is pre-
tended to evaluate the robustness of strategies when
distinct environments and robots are considered. Data
related to the current state of the robot in a environ-
ment and the adopted action for the next state will be
collected in order to use them as input data for GAIL
and BC training.
After training period, it is expected that both tech-
niques are able to provide actions that lead a robot to
reproduce the demonstrated behaviors previously by
an expert. The BC and GAIL implementations are
imported from Imitation (Wang et al., 2020), an API
that provides clean implementations of imitation and
reward learning algorithms. Therefore, there is the
Silva, K. and Calvo, R.
Mobile Robot Navigation Strategies Through Behavioral Cloning and Generative Adversarial Imitation Learning.
DOI: 10.5220/0011856700003467
In Proceedings of the 25th International Conference on Enterprise Information Systems (ICEIS 2023) - Volume 1, pages 517-524
ISBN: 978-989-758-648-4; ISSN: 2184-4992
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
517

possibility to ascertain the level of suitability of the
use of both implementations in custom environments
that are not present in Gym, the standard API for re-
inforcement learning that also has a collection of ref-
erence environments (Brockman et al., 2016).
The remaind of that text is organized as follow.
Works related to that current research are presented in
Section 2. In Section 3, information about the tools
used, the methodology and the development of the
strategies are addressed. The obtained results are ana-
lyzed and discussed in Section 4. Finally, the Section
5 presents the conclusion with a brief summary of the
research and the achieved results, as well as possible
future works.
2 RELATED WORK
This section presents some approaches that inspi-
rated and fundamented the current research. The ap-
proaches are reported by chronogical order.
In the 1980s, (Braitenberg, 1986) prepared a hy-
pothetical and pioneering study based on animals and
insects, whose instinctive behaviors in their natural
habitats influenced the author to describe these be-
haviors by means of psychological language in or-
der to assimilate them to the behaviors that would be
expected from a robot navigating an environment ac-
cording to the hypothetical model. This assimilation
resulted in the strategy known as the Braitenberg Al-
gorithm.
In the 2010s, Generative Adversarial Networks
(GAN) was presented as a technique in which a neural
network becomes capable of generating samples from
various types of data distribution, such as images, mu-
sic, speech, and prose (Goodfellow et al., 2014). Sub-
sequently, GAIL was developed in (Ho and Ermon,
2016), described by the authors as a general frame-
work used to extract a policy directly from various
data.
In the year 2015, the Trust Region Policy Opti-
mization (TRPO) was conceived in (Schulman et al.,
2015), an approach considered as an improvement of
the baseline policy gradient. Already in 2017, (Schul-
man et al., 2017) proposed the Proximal Policy Op-
timization (PPO) as a policy gradient technique with
superior performance to TRPO by having lower com-
putational cost and a simpler implementation. After
its inception in 2016, applications of GAIL in solving
different problems and variations of the original algo-
rithm have been proposed in the literature. In (Kue-
fler et al., 2017), the authors designed an extension
of a GAIL for training recurrent policies in order to
predict and simulate the behavior of human drivers
accurately and which, in the end, showed robustness
when dealing with perturbations in trajectories.
In 2019, (Zolna et al., 2019) presented TRAIL
as a variation of GAIL to improve the poor perfor-
mances obtained using the traditional algorithm in sit-
uations where the discriminating network occasion-
ally focuses on irrelevant features. Another varia-
tion of GAIL was proposed to generate modeling of
Car-Following behaviors and driving styles capable
of simulating such behaviors accurately with respect
to human drivers (Zhou et al., 2020). Next year, a
method was created for learning human navigational
behavior by inserting sample human trajectories into
crowded public spaces in GAIL (Fahad et al., 2020),
in which such trajectories were recreated by the au-
thors in a 3D simulator. In (Zuo et al., 2020), a deter-
ministic version of GAIL was designed to complete
the motion planning task of a robot with higher speed
and stability during learning compared to stochastic
GAIL.
In (Couto and Antonelo, 2021), two variations of
GAIL were generated to provide autonomous naviga-
tion for a vehicle located in a virtual urban environ-
ment of the CARLA simulator. Both versions suc-
ceeded in imitating the expert agent demonstration,
but the one that used BC to increase the loss func-
tion showed superior training stability and time con-
vergence. Another adaptation of GAIL was made to
generate robustness improvement of the original tech-
nique (Pham et al., 2021). The original algorithm has
also been adapted to generate locomotive autonomy
to RAMIS systems, and has obtained promising re-
sults with tests in virtual simulations and on a real
RAMIS platform (Pore et al., 2021).
In turn, the development of Co-GAIL emerged in
(Wang et al., 2022) to enable the learning and extrac-
tion of a human-robot collaboration policy through
behavioral samples of human-human collaborations.
For the validation of Co-GAIL, scenarios such as a 2D
strategy game and a delivery task between a human
and a robot were simulated, and in addition, it was
also tested on a task with an active human operator. A
multi-agent GAIL was devised to solve the problems
of sparse reward and local convergence when using a
model trained by a reinforcement learning algorithm
as the controller of an AUV (Mao et al., 2022). In
the same year, a secondary study was elaborated with
emphasis on the use of machine learning in path plan-
ning and control of autonomous mobile robots (Xiao
et al., 2022).
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
518

3 NAVIGATION STRATEGIES
As mentioned in the Section 1, this research aims
to develop two strategies for mobile robot naviga-
tion that are based on BC and GAIL. The idea is to
use each strategy to a learning robot perform actions
similar to those of the expert robot, and consequently
travel the defined paths in a similar manner to the ex-
pert robot.
The performance of each strategy is evaluated and
compared with each other in order to define which
one has the behavioral policies closest to the expert’s
policy and to observe the level of success that the
model of each strategy would have in leading the
learning agent through the paths defined in the dif-
ferent proposed scenarios. To ascertain the adaptabil-
ity of each strategy, simulations are also realized with
four kinds of agent-environment interactions. As pre-
viously mentioned, it is also desired to verify the fea-
sibility of integrating the Imitation algorithms in cus-
tomized environments external to the Gym toolkit.
3.0.1 Behavioral Cloning
Behavioral Cloning (or Supervised Imitation Learn-
ing) is one of the most popular IL approaches. The
task to be solved is treated as a supervised learning
problem in which behavioral samples coming from
the expert are grouped for training a model that, ac-
cording to (Sheh et al., 2011), generalizes the exam-
ples of actions received as input. At runtime, the
agent’s controller uses it to evaluate new situations
during its journey in the environment with the inten-
tion of performing the same types of actions that the
expert would perform in that context.
The main objective during the training phase in a
BC task is to minimize the loss function L(a
∗
, π
θ
(s)),
where a
∗
represents an action of the expert and
π
θ
(s) symbolizes an action coming from the learner
(model). The value returned by the loss function is
inversely proportional to the correctness of the ac-
tion generated by the learner. According to (Antonelo
and Schrauwen, 2010), the accumulation of cascad-
ing errors and the need for a high amount of data to
avoid the composition error caused by the co-variable
change are the main negative factors in applying this
approach.
3.0.2 Generative Adversarial Imitation
Learning
GAIL was conceived in (Ho and Ermon, 2016) as a
new learning technique based on the IRL and GAN
approaches, in which the occupancy measure (distri-
bution of pairs of states and actions performed by an
agent while exploring its environment via a policy π)
of an expert agent ρ
π
ε
represent the true dataset, while
the measure of a learning agent ρ
π
θ
is equivalent to all
the data created by a generative neural network.
A discriminating net receives the pairs of states
and actions (pairs (s,a)) from ρ
π
ε
and ρ
π
θ
to deter-
mine which of them are false or true (i.e., whether
they belong to ρ
π
θ
or ρ
π
ε
, respectively). In each iter-
ation of training, the discriminator sends feedback to
the generative net based on the determinations made
for each pair obtained. The generative tends to im-
prove as it receives feedback, in order to create pairs
that are increasingly difficult for the discriminator to
distinguish.
The goal of GAIL is to promote constant compe-
tition between these two nets, so that ρ
π
θ
is similar to
ρ
π
ε
when the stopping criteria for training is reached.
In this way, the generating net is able to provide pairs
(s,a) very close to those that belong to the original
dataset. In the literature it is common to use the policy
gradient methods TRPO and PPO for training a gen-
erative network, while an MLP can be used as the dis-
criminating network. More information about GAIL
can be found at (Ho and Ermon, 2016).
3.1 Strategies Development
The CoppeliaSim simulator (Rohmer et al., 2013) was
used for the construction of the simulation scenarios
and execution of the experiments in its 4.3 release
using dynamic engine Bullet 2.83 and balanced dy-
namic setting. To assist in the construction of the
strategies, the BC and GAIL implementations con-
tained in the 0.2 release of the Imitation API (Wang
et al., 2020) were used for training and the consequent
extraction of the policies. The development flow for
each strategy is shown in Figure 5.
In each proposed scenario, a simulation is per-
formed in which the expert robot records its pairs (s,a)
in a log file while performing actions to travel along a
given trajectory. The pairs are used as input for train-
ing each strategy. If the agent is a Braitenberg vehicle,
a filter must be applied to its log file to remove identi-
cal pair (s,a) that would cause redundancy, noise and
increase training time.
In the next step, the expert file is used as the train-
ing dataset for the model referring to the desired nav-
igation strategy. Several experiments containing dif-
ferent parameters and hyper-parameters for the algo-
rithms are carried out continously for the two strate-
gies in each of the scenarios until the best results is
achieved for each model, considering the available re-
sources of the Imitation API. Upon finding such re-
sults, a simulation is realized with the model itself as
Mobile Robot Navigation Strategies Through Behavioral Cloning and Generative Adversarial Imitation Learning
519
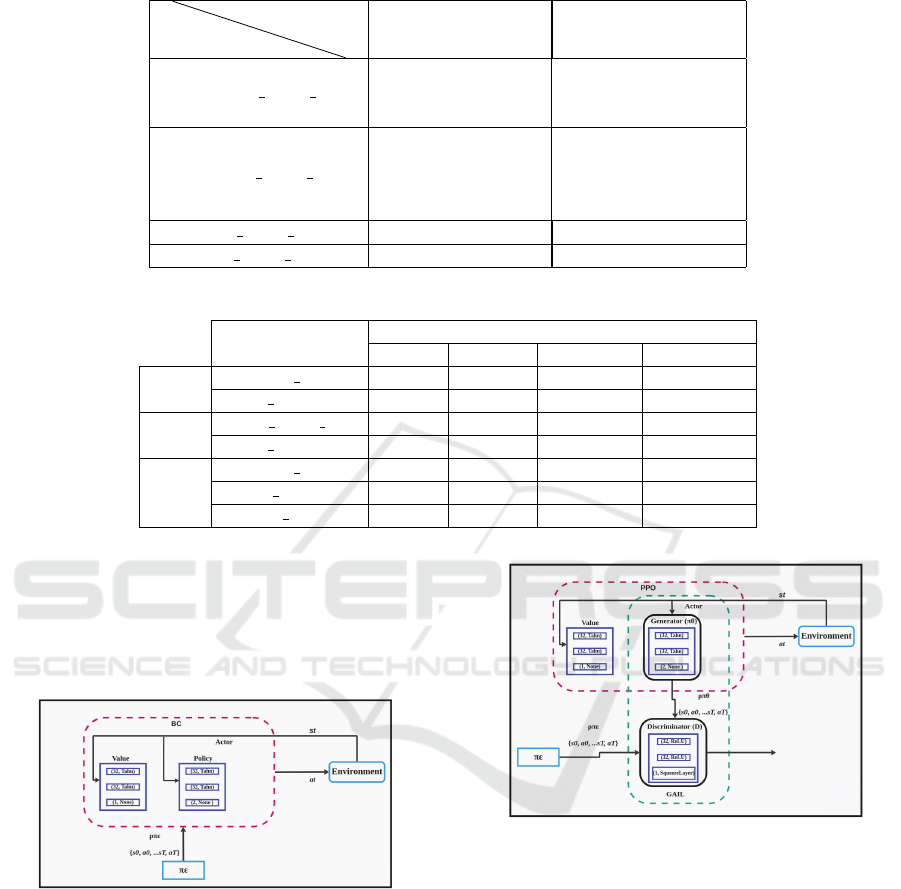
Table 1: Minimum and maximum values for the state space and action space of each scenario.
Parameter
Scenario
S1 e S2 S3 e S4
observation space lows [-7.11, -4.72, -3.14]
[0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 0.0, 0.0,
0.0, 0.0]
observation space highs [7.11, 4.72, 3.14]
[0.1, 0.1, 0.1, 0.05,
0.05, 0.05, 0.05,
0.05, 0.05, 0.05,
0.05]
action space lows [0.0, 0.0] [0.0, 0.0]
action space highs [2.0, 2.0] [4.5, 4.5]
Table 2: Algorithms parameters in each scenario.
Parameters
Scenarios
S1 S2 S3 S4
BC
batch size 6 12 219 556
total timesteps 20.000 60.000 40.000 500.000
GAIL
demo batch size 6 12 219 556
total timesteps 80.500 500.000 2.500.000 10.000.000
PPO
batch size 64 56 219 278
n steps 64 112 438 556
ent coef 0.0 0.001 0.001 0.001
the driver for the learning robot’s actions. During the
driving, the pairs (s,a) provided by the model are also
registered in a file so that its actions are compared
with the expert’s actions by means of the proposed
evaluation methods.
Figure 1: Imitation’s BC network architecture and its inter-
action with the environment.
Next, the simulation scenarios proposed for this
work are described. Each of them has a continuous
action space and state space. The ideal policy to be
extracted and the environment for each scenario are
deterministic. The learning of the agents is always
model-free. As the robot is always a suspension state
when it reaches its final state, the tasks are exclusively
episodic and with a finite horizon for each scenario.
The BC and GAIL implementations are config-
ured according to the architectures present in Figures
1 and 2. Aiming to find an equilibrium for all pro-
Figure 2: Imitation’s GAIL network architecture and its in-
teraction with the environment. The PPO is used as the gen-
erative network.
posed scenarios and thus avoid possible overfitting
or underfitting after training, all experiments in this
work use two hidden layer MLPs with 32 units each
for both BC and GAIL. The activation functions used,
the outputs generated by each MLP, and the interac-
tion of each approach with the environment are rep-
resented in Figures 1 and 2. For all MLPs, the policy
and value neworks are shared.
3.1.1 Scenarios 1 and 2
For scenarios S1 and S2, a 750 m² rectangular 3D en-
vironment was built with walls around it to prevent
the robot from falling off the scenario floor. The vir-
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
520
tual version of Pioneer-P3DX that is included in Cop-
peliaSim is used as the deterministic agent for both
scenarios, which moves through them via commands
sent from the API to the simulator. A Pioneer state s is
represented by a vector of real numbers [x, y, R
z
(γ)]
that represents the coordinates and orientation angle
in radians of the agent. An action a is composed by
joining the velocities of the robot’s two wheels into
a vector [v1, v2]. Table 1 presents the minimum and
maximum values considered for the space and action
states. From the expert, 6 and 12 pairs (s,a) were re-
spectively recorded in log files for S1 and S2, where
each pair was considered essential for a effiicency per-
formance of each model after training. The paths de-
fined for the expert to follow can be visualized in Fig-
ures 7 and 8.
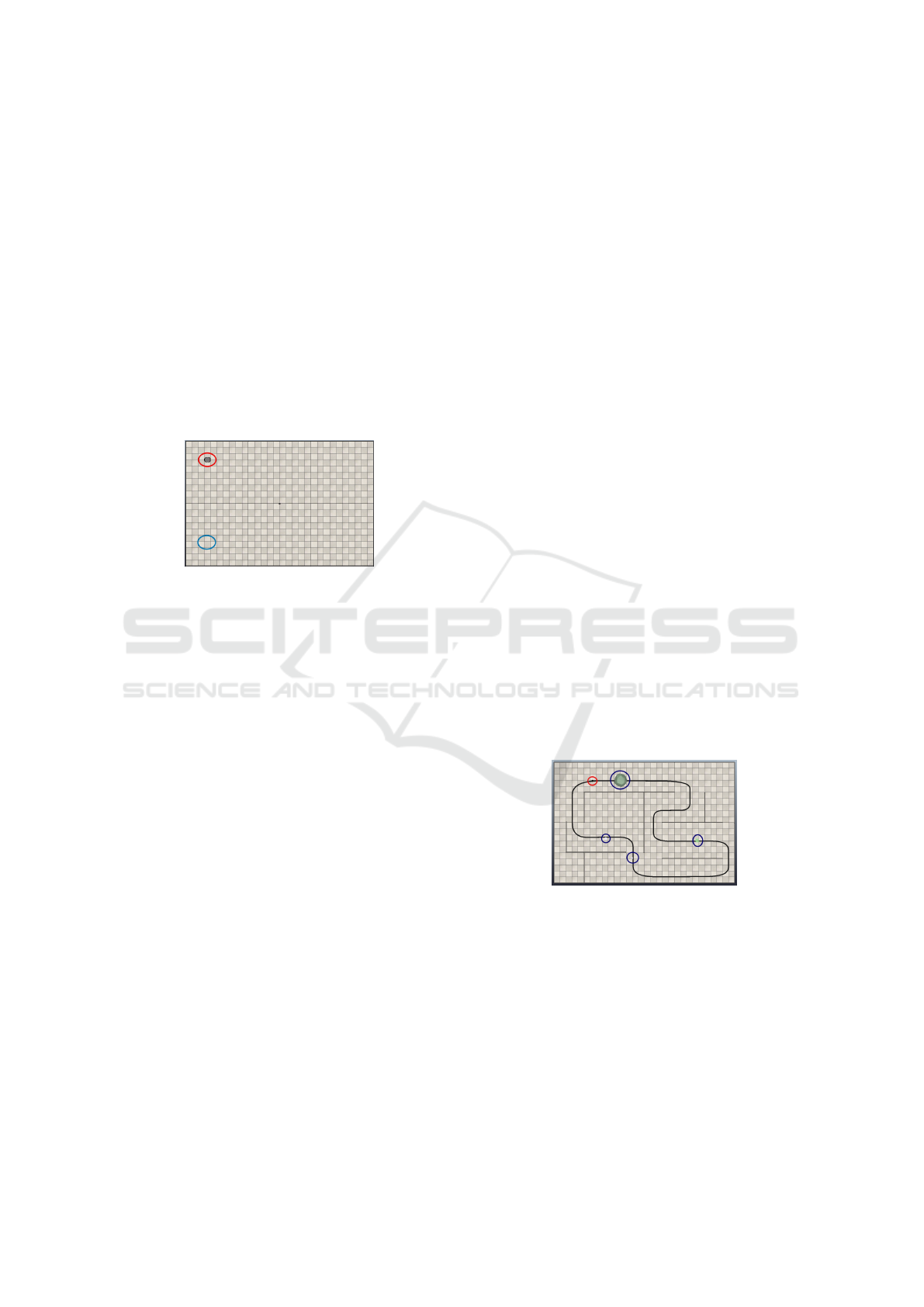
Figure 3: Environment of Scenario 1 with Pioneer-P3DX
in its starting position delimited by the red dot and with
orientation to the right side. Scenario 2 is nearly identical
to the first one, but the robot’s starting position is located
inside the blue dot with the orientation turned upside.
3.1.2 Scenarios 3 and 4
For scenarios S3 and S4, a rectangular environment
similar to the predecessor scenarios was built, but
with a size of 375 m², walls positioned on all four
sides and other parts of the environment. The robot
used for these scenarios is the ePuck. CoppeliaSim’s
version of ePuck has a light sensor, a distance sen-
sor, and a native implementation of a Braitenberg al-
gorithm, which together cause the robot to move in-
dependently along a given path while identifying and
avoiding possible obstacles.
The light sensor assists in planning a path by
constantly checking how close the ePuck is to a
light source, simulating the fear instinct (Braitenberg,
1986). If the ground traversed by the agent is dark
(i.e. partial or total absence of light), the stimulus re-
ceived is insufficient and no changes is set in wheel
speed. However, the light coming from the ambient
floor stimulates the sensor whenever the robot tries to
go out of the path, resulting in a change in the speed
of the wheels to make it follow the path orientation
again.
If the distance sensor identifies possible obstacles
in the vicinity of the agent, signals are sent to change
the speed of the wheels in order to perform the ap-
propriate evasive maneuvers. A black path was built
to be traveled by the ePuck until it almost reaches a
complete turn through it, representing the S3. The
reason for the chosen color is for the functioning of
the light sensor stimulus and, consequently, the fear
instinct that is an essential part of the algorithm. S4 is
similar to S3, but four obstacles were added (Figure
4) to check not only the movement inside the path, but
also the ability of the strategies to identify them and
lead the agent to realize necessary detours in a similar
way to the expert robot.
For a Braitenberg vehicle, a state s of the ePuck is
represented by a vector of 11 floating-points and 32-
bit , in which the first 3 represent the data received
by the light sensor and the remaining ones depict the
value of each of the 8 beams of the distance sensor.
Again, an action a is composed of a vector contain-
ing two numeric values referring to the speeds of each
wheel of the agent.
The parameters and hyperparameters that returned
the best performances in each scenario are shown in
Table 2. Only the parameters and hyper-parameters
that were changed are mentioned in the table, while
the others used implicitly in the algorithm were ig-
nored because they kept their default values defined
by Imitation (Wang et al., 2020). The allowed numer-
ical range for the states and actions of S3 and S4 are
also in Table 1. A total of 219 and 556 pairs (s,a) of
the expert were recorded for S3 and S4, respectively.
Looking at the relationship between the total number
of pairs and the number of features, it can be con-
cluded that all the scenarios proposed in this work are
low-dimensional.
Figure 4: Environment of Scenario 4 with ePuck in its start-
ing position. The red circle shows the initial position of the
agent while the blue ones mark the location of each obstacle
inserted. Scenario 3 is nearly identical to S4 but it has no
obstacles.
3.2 Evaluation Methods
The Mean Squared Error (MSE) and Mean Abso-
lute Error (MAE), two traditional error metrics of re-
gression type machine learning problems, are used to
make an accurate evaluation of which strategy is able
to generate actions closer to the ones executed by the
Mobile Robot Navigation Strategies Through Behavioral Cloning and Generative Adversarial Imitation Learning
521

Figure 5: The development flowchart.
expert. The calculations performed in MSE and MAE
are represented, respectively, in the equations 1 and 2.
In both, N symbolizes the total of pairs (s,a) of a sce-
nario, y
i
is the optimal action coming from the expert
and ˆy
i
represents the action predicted by the trained
model of the strategy.
1
N
N
∑
i=1
(y
i
− ˆy
i
)
2
(1)
1
N
N
∑
i=1
|y
i
− ˆy
i
| (2)
Considering the characteristics of the proposed
strategies, it is possible to state that a comparison be-
tween the paths executed by the learner and the expert
is as important as measuring the error between the ac-
tions recorded by both. The metrics are able to inform
which of the strategies have the lowest error rate, but
they can not accurately determine whether a model
that provides outputs considered poor or average can
still make the learning robot follow the trajectory de-
termined by the expert in a similar manner.
It is only by comparing the pairs (s,a) of the expert
with those of the learner that it will be possible to an-
alyze whether the path taken by the latter agrees with
that of the former, regardless of how close the outputs
generated by the learner’s model are. Next, the pairs
of the expert and the models are displayed in graphs
generated in order to perform the comparison.
4 RESULTS
The construction of the proposed scenarios was fea-
sible due to the resources available in CoppeliaSim
(Figures 3 and 4). The BC and GAIL algorithms from
the Imitation API were successfully integrated into
each scenario. It can be stated that the adaptability
of the API in environments external to Gym was suf-
ficient, so the entire development flow presented in
Figure 5 could be performed in each scenario.
Figure 6: Comparison of MSE and MAE for BC and GAIL
strategies in each scenario.
4.1 Error Metrics
In general, both strategies generated similar ac-
tions to those that were generated by the expert, as
can be observed in Figure 6. Although GAIL pre-
sented a considerably low MSE and MAE for all sce-
narios, BC managed to obtain even lower values and,
consequently, more similar actions to those that were
produced by the expert in each of them. Note that,
with the exception of S4, GAIL’s MSE was closer to
that of the BC while the MAE distance between the
two was greater.
4.2 Path Comparisons
Observing Figure 7, it is possible to affirm that GAIL
obtained a satisfactory learning in S1 by driving the
robot along the same path defined by the expert even if
in the final state change, it directed the agent to a state
a little higher than the ideal one. The BC was able to
learn the locomotive behavior. Moreover, the strategy
steered the robot to a higher state, but closer to the
original one when it is compared to the one GAIL had
done.
Figure 7: Path of Scenario 1 executed by the expert and the
trained BC and GAIL models.
In S2, GAIL performed similarly to the expert for
most of the trajectories. The differences in the actions
returned by the model in some of the states resulted
in slight deviations in orientation along the path, but
they did not prevent the agent from reaching its des-
tination. In turn, the BC model reproduced the loco-
motion along the trajectory in an identical manner to
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
522
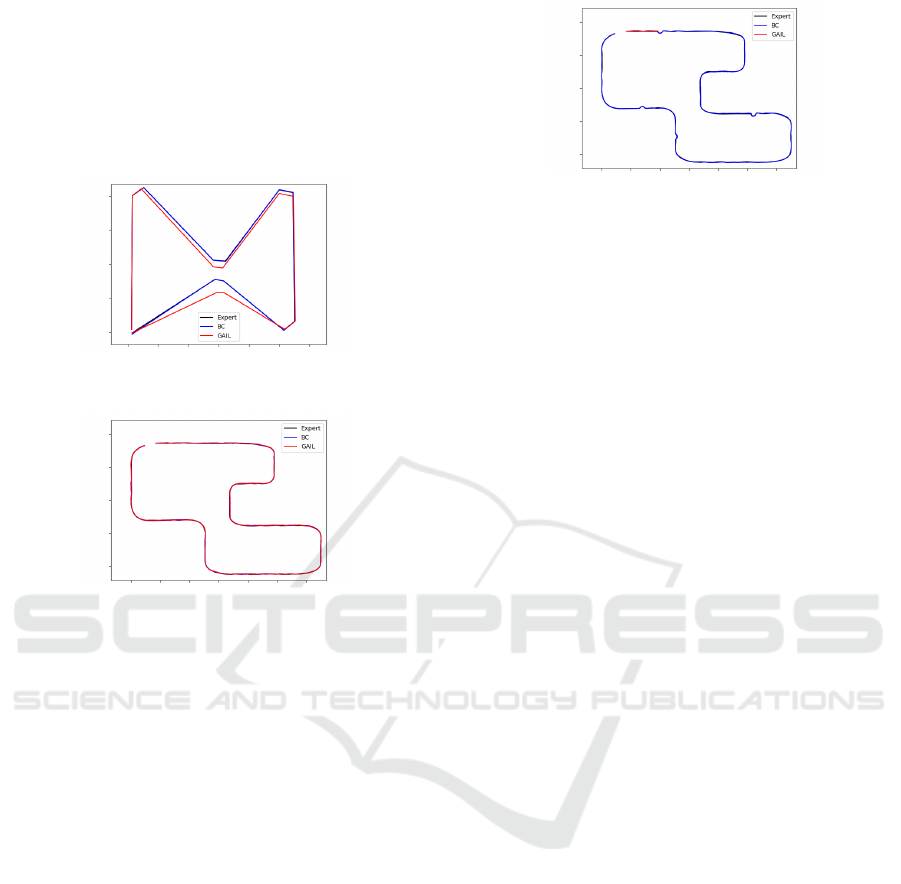
that of the expert, as can be seen in Figure 8. In S3
(Figure 9), both BC and GAIL performed satisfacto-
rily and were able to reproduce the path taken by the
ePuck guided by a Braitenberg algorithm. Note that
the higher amount of MSE and MAE obtained for the
GAIL strategy (Figure 6) did not prevent it from suc-
cessfully leading the agent along the defined path.
Figure 8: Path of Scenario 2 executed by the expert and the
trained BC and GAIL models.
Figure 9: Path of Scenario 3 executed by the expert and the
trained BC and GAIL models.
From the results of the fourth scenario in Figure
10, it can be seen that the BC was able to travel the
defined path and perform the same evasive maneuvers
as the expert when it approaches the obstacles. How-
ever, GAIL was not able to make ePuck perform the
evasive maneuver as soon as it made contact with the
first object in the scenario. The model was able to
move the agent along the trajectory at the beginning,
but even with considerably low MSE and MAE val-
ues, the actions it sent to the robot’s wheels did not
make it perform an evasive maneuver when the sen-
sors identified a nearby obstacle. Instead, the actions
returned by GAIL led the robot to maintain forward
motion until it came into friction with the first obsta-
cle and remained stagnant as a consequence.
5 CONCLUSIONS
The navigational autonomy of a mobile robot in-
serted in a given environment remains one of the main
research trends in robotics and automotive studies.
Thus, this project proposes two navigation strategies
for land mobile robots, inspired by Imitation Learning
techniques. One of them is based on BC and the other
on GAIL, the goal of building such strategies involves
Figure 10: Path of Scenario 4 executed by the expert and
the trained BC and GAIL models. The four curves present
on the path represent the direction the agent took to avoid
each obstacle.
not only learning locomotive behaviors specific to a
mobile agent, but also analyzing and comparing the
performance between them when driving this agent
through different environments. Furthermore, it is de-
sired to know the level of robustness in learning each
strategy when different agents and navigation meth-
ods are used.
BC and GAIL implementations were imported
from the Imitation API to aid in the development of
this work, and the CoppeliaSim simulator was used to
build four different virtual environments. Pioneer was
defined as the agent for the first two scenarios that is
guided through the paths by means of commands sent
to the simulator. ePuck was chosen as the agent for
the remaining scenarios that moves along the paths
according to a Braitenberg algorithm.
Error metrics and the comparison of paths traveled
between the expert agent and the learner agent were
applied as methods for evaluating the results obtained
in each strategy. The analysis of the achieved results
made it possible to state that BC obtained lower MSE
and MAE and a higher accuracy to drive the robot in
all scenarios compared to GAIL. However, the use of
the GAIL-based strategy with the parameters defined
in Table 2 proved fully feasible for the first three sce-
narios. Considering all the obtained results, it can be
stated that the BC and GAIL implementations com-
ing from Imitation are adaptable for use in environ-
ments, agents and navigation forms external to the
Gym toolkit.
In order to improve the achieved results, one fu-
ture work aims to consider different amounts of hid-
den layers and neurons for the BC and GAIL archi-
tectures. Ascertaining the level of impact on perfor-
mance when using other activation functions in the
BC and GAIL MLPs is also an interesting topic for
the future. To further evaluate the robustness of both
strategies, it pretend to adapt and run the training
of both strategies on learning other robot navigation
techniques, such as SLAM or A Star. Scenarios that
utilize a UAV agent in airspace environments or UUV
in aquatic locations would also be considerable ad-
Mobile Robot Navigation Strategies Through Behavioral Cloning and Generative Adversarial Imitation Learning
523

ditions. Developing all of these additional ideas re-
quires time and effort, but the results obtained could
unravel the reason for GAIL’s failure to learn obsta-
cle avoidance in scenarios as S4, as well as enrich the
knowledge of each strategy’s capabilities and applica-
bility.
ACKNOWLEDGEMENTS
The authors would like to thank the National Coun-
cil for Scientific and Technological Development
(CNPq) (421548/2022-3 and 88881.753469/2022-01)
and Araucaria Foundation (17.633.124-0) for their fi-
nancial support on this work. We would also like to
thank the Manna Team for support, learning and col-
laboration of its members.
REFERENCES
Antonelo, E. A. and Schrauwen, B. (2010). Supervised
learning of internal models for autonomous goal-
oriented robot navigation using reservoir computing.
In 2010 IEEE International Conference on Robotics
and Automation, pages 2959–2964. IEEE.
Braitenberg, V. (1986). Vehicles: Experiments in synthetic
psychology. MIT press.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym.
Couto, G. C. K. and Antonelo, E. A. (2021). Genera-
tive adversarial imitation learning for end-to-end au-
tonomous driving on urban environments. In 2021
IEEE Symposium Series on Computational Intelli-
gence (SSCI), pages 1–7. IEEE.
Fahad, M., Yang, G., and Guo, Y. (2020). Learning human
navigation behavior using measured human trajecto-
ries in crowded spaces. In 2020 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 11154–11160. IEEE.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In
Advances in neural information processing systems,
pages 2672–2680.
Ho, J. and Ermon, S. (2016). Generative adversarial im-
itation learning. In Advances in neural information
processing systems, pages 4565–4573.
Kuefler, A., Morton, J., Wheeler, T., and Kochenderfer, M.
(2017). Imitating driver behavior with generative ad-
versarial networks. In 2017 IEEE Intelligent Vehicles
Symposium (IV), pages 204–211. IEEE.
Mao, Y., Gao, F., Zhang, Q., and Yang, Z. (2022). An auv
target-tracking method combining imitation learning
and deep reinforcement learning. Journal of Marine
Science and Engineering, 10(3):383.
Pham, D.-T., Tran, T.-N., Alam, S., and Duong, V. N.
(2021). A generative adversarial imitation learning ap-
proach for realistic aircraft taxi-speed modeling. IEEE
Transactions on Intelligent Transportation Systems,
23(3):2509–2522.
Pore, A., Tagliabue, E., Piccinelli, M., Dall’Alba, D.,
Casals, A., and Fiorini, P. (2021). Learning from
demonstrations for autonomous soft-tissue retrac-
tion. In 2021 International Symposium on Medical
Robotics (ISMR), pages 1–7. IEEE.
Rohmer, E., Singh, S. P. N., and Freese, M. (2013). Cop-
peliasim (formerly v-rep): a versatile and scalable
robot simulation framework. In Proc. of The Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Schulman, J., Levine, S., Abbeel, P., Jordan, M., and
Moritz, P. (2015). Trust region policy optimization. In
International conference on machine learning, pages
1889–1897. PMLR.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Sheh, R., Hengst, B., and Sammut, C. (2011). Behavioural
cloning for driving robots over rough terrain. In
2011 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 732–737. IEEE.
Wang, C., P
´
erez-D’Arpino, C., Xu, D., Fei-Fei, L., Liu, K.,
and Savarese, S. (2022). Co-gail: Learning diverse
strategies for human-robot collaboration. In Confer-
ence on Robot Learning, pages 1279–1290. PMLR.
Wang, S., Toyer, S., Gleave, A., and Emmons, S. (2020).
The imitation library for imitation learning and
inverse reinforcement learning. https://github.com/
HumanCompatibleAI/imitation.
Xiao, X., Liu, B., Warnell, G., and Stone, P. (2022). Motion
planning and control for mobile robot navigation us-
ing machine learning: a survey. Autonomous Robots,
pages 1–29.
Zhou, Y., Fu, R., Wang, C., and Zhang, R. (2020). Mod-
eling car-following behaviors and driving styles with
generative adversarial imitation learning. Sensors,
20(18):5034.
Zolna, K., Reed, S., Novikov, A., Colmenarejo, S. G., Bud-
den, D., Cabi, S., Denil, M., de Freitas, N., and Wang,
Z. (2019). Task-relevant adversarial imitation learn-
ing. arXiv preprint arXiv:1910.01077.
Zuo, G., Chen, K., Lu, J., and Huang, X. (2020). Determin-
istic generative adversarial imitation learning. Neuro-
computing, 388:60–69.
ICEIS 2023 - 25th International Conference on Enterprise Information Systems
524
