
Duck Box: Sensor-Based Material Flow Optimization for
Economically and Energy-Efficient Intralogistics
Christoph Ecker
1
, Martin Riester
1
and Sebastian Schlund
2a
1
Fraunhofer Austria Research GmbH, Theresianumgasse 7, Vienna, Austria
2
Institute of Management Science, TU Wien, Theresianumgasse 27, Vienna, Austria
Keywords: Intralogistics, Material Flow Optimization, Forklift, LoRaWAN, IPS, Energy Efficiency.
Abstract: Small batch sizes, increasing variant diversity and short delivery times raise the complexity of intralogistics
in manufacturing companies. As a result, these challenges lead to economically- and energy-inefficient
material flows. To address this issue, companies conduct material flow optimization. The decisive factor is
that the planning often cannot be data driven. This is because there is no or insufficient data on internal
material flows and optimization potentials cannot be fully exploited. The aim of this paper is to create
economically- and energy-efficient material flows in manufacturing companies. The focus is on the
development of a sensor prototype for the localization and utilization measurement of forklifts to close the
current data gaps. Based on the current state of the art, the sensor prototype Duck Box is developed. This
Indoor Positioning System (IPS) uses LoRa to determine the position of forklifts and an ultrasonic sensor to
identify the utilization. The recorded and in real time analysed data is transmitted to a database via Long
Range Wide Area Network (LoRaWAN). Finally, the developed prototype is applied and evaluated in a case
study. The results of this sensor-based approach show the significant added value for the economically- and
energy-efficient optimization of material flows.
1 INTRODUCTION
Manufacturing companies are continuously faced
with new challenges. These include small batch sizes,
increasing diversity of variants and short delivery
times. To meet these, companies in most cases react
by building up additional transport and personnel
capacities. Since most internal transports are carried
out manually, this increases internal logistics costs
and reduces the company's success (ten Hompel and
Kerner, 2015; Zajac and Rozic, 2022).
In recent years, manufacturing companies have
therefore invested heavily in optimizing the internal
material flow by eliminating weaknesses such as long
transport distances, high shares of empty runs and low
utilization of forklifts (Martin, 2016).
To address these issues, data is obtained and
analysed, weaknesses are identified and optimization
potentials are developed in the course of material
flow planning (VDI 2498, 2011). This approach is
shown in the following references.
a
https://orcid.org/0000-0002-8142-0255
Radhwan et al. (2019) conduct systematic, graph-
based layout planning to increase material flow
efficiency by up to 20 percent. A method for
optimizing material provision is presented in Herbert
et al. (2021). Krajcovic et al. (2019) develop a genetic
algorithm to optimize material flows through layout
planning. Belic et al. (2018) reduce internal material
flow costs by optimizing layout, lead times and
employee utilization. Chayaphum et al. (2019)
determine the optimal number of forklifts in
warehouse processes by using a simulation model.
In addition to the efficiency improvements
required, the importance of sustainability goals as
well as energy efficiency is rising (Ene et al., 2016,
Zajac and Rozic, 2022). Intralogistics accounts with
about 11 percent for a significant share of the logistics
industry's greenhouse gas emissions, which in turn
accounts for about 13 percent of total global
greenhouse gas emissions. Since the forklift is an
essential element of intralogistics, the scientific
community has increasingly focused on the topic of
Ecker, C., Riester, M. and Schlund, S.
Duck Box: Sensor-Based Material Flow Optimization for Economically and Energy-Efficient Intralogistics.
DOI: 10.5220/0011968100003491
In Proceedings of the 12th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2023), pages 113-120
ISBN: 978-989-758-651-4; ISSN: 2184-4968
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
113

sustainable and energy-efficient use of forklifts
(Khoei et al., 2022).
Zajac and Rozic (2022) find that transport
parameters such as transport speed or curve radius are
directly related to forklift energy consumption and
derives a calculation method for quantification.
Pashkevich et al. (2019) and Ziólkowski et at. (2022)
show that the utilization rate and transport distances
significantly affect energy-efficient forklift use.
According to the analyses of Fuc et al. (2016), for
electric-powered forklifts, empty trips cause only up
to 5 percent less energy consumption compared to
trips loaded with one ton; diesel- and gas-powered
forklifts show larger deviations. Ene et al. (2016) and
Burinskiene et al. (2018) show that route optimization
algorithms can reduce energy demand in warehouses
and increase value creation.
One of the biggest challenges in material flow
optimization is that planning often cannot be data-
driven. This is because no or only insufficient data
regarding the current material flows are available
(Martin, 2016; VDI 2689, 2019). This inadequate
data basis can significantly limit the level of detail,
validity and objectivity of the methods presented and
their results (Schwab et al., 2016). Efficient collection
of actual, real-world data regarding utilization and
transport distances travelled is an additional
challenge (Li et al., 2021). Approaches to create the
required data basis are offered by sensor solutions
(Pashkevich et al., 2019) and Indoor Positioning
Systems (Pascher et al., 2019).
The aim of this paper is to create energy- and
economically-efficient material flows in
manufacturing companies. The focus is on the
development of a sensor prototype for the localization
and utilization measurement of forklifts to close the
current data gaps in the planning of internal material
flows.
To achieve this objective, the following structure
is chosen for this paper. Section 2 explains the state
of the art of indoor positioning systems in
intralogistics. Based on this, LPWAN and
specifically LoRaWAN will be presented as an
Internet of Things (IoT) technology suitable for
logistics applications. These fundamentals serve as
the basis for the development of the sensor prototype
in section 3. The concept and its components are
described in detail. In section 4, the resulting
prototype is applied and evaluated in a case study in
the building materials industry. Finally, the results are
summarised in the conclusion and an outlook on
further research is given.
2 RELATED WORKS
2.1 Indoor Positioning Systems (IPS)
IPS are defined as a wireless network of
intercommunicating systems that are used to
determine the position of objects or people in indoor
areas. These systems consist of three main
components: the location technology, the location
method, and algorithms for data evaluation (Pascacio
et al., 2019; Kaluža et al., 2017).
Compared to outdoor applications, indoor
applications show high complexity. This is because
the industrial environment has a significant influence
on the reliability and robustness of measurement
results. Furthermore, accuracy and range
requirements differ significantly depending on the
use case. For each specific use case, a suitable
location technology (infrastructure-less or
infrastructure-based), an appropriate location method
(e. g. Time of Arrival - ToA, Received Signal
Strength Indicator - RSSI) and target-oriented
evaluation algorithms (e. g. triangulation) must be
selected based on the prevailing requirements and
restrictions (Pascher et al., 2019; Pascacio et al.,
2021, Zheng et al., 2010). Therefore, many different
indoor positioning systems in intralogistics appear in
literature (Kaluža et al., 2017).
Chai et al. (2017) and Wang et al. (2014) use
active radio-frequency identification (RFID) with
reference tags to locate vehicles in warehouses.
Motroni et al. (2021) developed a stationary RFID
gate solution to identify forklifts and their direction
of travel.
Burinskiene (2015) implements a combination of
active RFID to locate forklifts and passive RFID to
identify the material on the fork. Mel et al. (2016) and
Müller et al. (2018) focus exclusively on tracking
materials using passive RFID.
Barral et al. (2019), Halawa et al. (2020), Pilati et
al. (2021), Frankó et al. (2020) and Gladysz et al.
(2017), on the other hand, use Ultra-Wide Band
(UWB) to collect intralogistic key figures from
transport systems. Zhao et al. (2020) link UWB
technology for locating forklifts with passive RFID
for identifying materials and loading conditions.
Jung (2018) and Borstell (2016) are developing
camera-based tracking systems for forklifts using
reference markers. Li et al. (2021) use machine vision
to measure utilization rates of forklifts. Kanakaraja et
al. (2021) and Bencak et al. (2022) use Bluetooth Low
Energy (BLE) to locate intralogistics objects.
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
114

The essential characteristics of all these
applications are that, in addition to meet the intended
use to 100 per cent, they should be realised cost-
effectively and with little implementation effort. The
ongoing technological progress of digitalisation
strengthens the trend of IPS deployment in
intralogistics (Pascher et al., 2019; Zheng et al, 2010;
Ficco et al., 2013).
2.2 LPWAN and LoRaWAN
A radio-based technology that has rarely been used
for localization in intralogistics is the Low Power
Wide Area Network (LPWAN). This IoT technology
is particularly suitable for sensors and applications
with low data volumes and low transmission
frequencies. Furthermore, LPWAN is characterized
by the ability to be used in different environmental
conditions as well as for data transfer over long
distances with low energy consumption (LoRa
Alliance, 2015; Pieper et al., 2019).
As Herion et al. (2020) state, LoRaWAN, a standard
of LPWAN, shows itself to be a particularly suitable
technology for the use in intralogistic warehouse
processes due to these characteristics. First
LoRaWAN demonstrators and pilot applications in
the logistics context have been developed, as
Kanakaraja et al. (2021), Pieper et al. (2019) and
Fottner et al. (2021) have shown.
LoRaWAN serves as a communication protocol
and system architecture. This standard uses LoRa as
a wireless modulation that enables long-range
communication links in the free regional ISM or SRD
frequency bands (e. g. in Europe at 867-869 MHz).
As shown in Figure 1, LoRaWAN networks are
star shaped (LoRa Alliance, 2015). They consist of
the following components:
End Nodes are bidirectional, asynchronous IoT
devices that send data when it is available.
Gateways receive the end node data and
forward it to the network server via 3G, WiFi
or Ethernet interface.
The network server contains the data
aggregation and processing.
Application servers are defined as the end
applications such as databases or web
applications (Herion et al., 2020).
A special feature of this technology is that the end
nodes are not assigned to a single gateway. Therefore,
transmitted data is usually forwarded several times to
the cloud-based network server, which then analyses
and filters it. The advantage is that mobile end-
devices do not have to be registered with new
gateways and are therefore network-independent. A
disadvantage of LoRaWAN is the low available data
rate, which in turn has the advantage of low energy
consumption (Herion et al, 2020; Pieper et al, 2019;
LoRa Alliance, 2015).
Figure 1: Design of LoRaWAN networks based on LoRa
Alliance (2015).
3 SENSOR-BASED MATERIAL
FLOW OPTIMIZATION
In the continuation of this paper, the described
theoretical fundamentals are used to develop a
LoRaWAN-based sensor prototype, called Duck
Box, for the localization of internal transport systems,
in this case forklifts. The aim is to develop a
temporary real-time IPS that creates a location-based
database that allows holistic material flow
optimization. For this purpose, the concrete
requirements are defined by the project team as well
as by means of expert interviews, which are used for
the design of the prototype:
The IPS should be able to locate the transport
flows of forklifts between sources and sinks.
In addition, it should be possible to
differentiate between empty and loaded runs to
be able to calculate utilization levels.
Furthermore, process and handling times
during material pick-up and drop-off are to be
identified.
The sensor has to be flexibly usable on a wide
range of forklift types and models.
The components of the IPS should have an
independent energy supply and be able to be
used for at least 3 weeks without charging
batteries.
The system should be able to be set up and
removed in a short time and no intervention in
the IT infrastructure of the companies should
be necessary.
Duck Box: Sensor-Based Material Flow Optimization for Economically and Energy-Efficient Intralogistics
115

Furthermore, the implementation of the system
should not cause any restrictions in the ongoing
production and logistics processes.
The generated data should be evaluated locally
and in real time by the sensor and then
transferred to an SQL database.
3.1 Tracking System
Based on the defined requirements, the conception of
the IPS is started. Due to its optimal characteristics
for mobile logistics applications, the LoRaWAN
standard with its LoRa communication technology is
selected as the location technology. Since LoRaWAN
also transmits the Received Signal Strength
Indicators, the RSSI method is defined as the location
method. The algorithms for data evaluation are
calculated locally by the microprocessor of the
sensor, as defined in the requirements.
Based on these definitions, an IPS is developed
that consists of three components:
The repeater is used to define the sources and
sinks of the material flows. For this purpose, it
is mounted at the transfer points by means of
cable ties or magnets. This component
transmits a unique ID via LoRa, which is
subsequently used for localization.
The Duck Box is the mobile component of the
tracking system. It is mounted on the front of
the forklift using industrial magnets. The
information sent by the repeater is received and
evaluated by the Duck Box. By developing
various algorithms, the material flow relation
between the source and the sink of the transport
as well as the dwell time at the source are
calculated. Furthermore, based on these
algorithms, it is possible to distinguish whether
material handling is carried out at the source or
whether the forklift has only passed the source.
After calculating these key figures, the data is
transmitted to the gateway via LoRaWAN
standard.
The gateway receives the data from the Duck
Box and forwards it via 3G to the network
server. A workflow is set up on this server,
which saves the generated data in a SQL
database.
Figure 2 shows the cooperation of the individual
components in the LoRaWAN network. The grey
arrows show the data transfer between repeater, Duck
Box and gateway. It is important to add that both the
reception ranges of the Duck Box and the
transmission strength of the repeater can be
individually adjusted according to requirements. This
is shown in Figure 2 by means of the blue ellipses.
This prevents several receiving areas from
overlapping.
3.2 Loading Status and Degree of
Utilization
For identifying the loading status of the forklift, the
ultrasonic technology is used. Ultrasonic sensors emit
ultrasonic signals at regular intervals, which in turn
are reflected by objects on the fork of the truck. The
reflected ultrasonic signals are received by the sensor.
Based on the time difference between sending and
receiving the ultrasonic signal and multiplying it by
the speed of sound, it is possible to determine the
distance between the object and the ultrasonic sensor.
If this distance is greater than the length of the fork,
the forklift is travelling empty, otherwise it is
travelling under load. Based on the identification of
the empty and loaded runs and in combination with
the location concept, this enables analyses of the
utilization levels per transport relation. The source,
the sink, the dwell time at the source, the transport
route incl. intermediate stops and the loading status of
the transport relation thus form the data set.
The effect of the direct assignment of the loading
status to the transport relation is also used to minimize
the data volume to be transmitted and to comply with
the restrictions of the LoRaWAN standard.
Therefore, the change of the loading state at a repeater
serves as event, which triggers the data transmission
via LoRaWAN. This functional principle can be seen
in Figure 2. The forklift equipped with a Duck Box
(D) starts its unloaded transport at source R1.
Arriving at the reception area of the sink R2, the
forklift picks up material. The loading status changes
to loaded. This event then triggers the data
transmission to the gateway (G).
Figure 2: Tracking system Duck Box.
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
116

3.3 The Developed Prototype: Duck
Box
For the implementation of the concepts, suitable
hardware modules were selected, programmed,
designed and developed:
An Arduino-based microcontroller is used to
locally evaluate the measured data of the
positioning and the loading by means of the
developed algorithms.
A Murata LoRa chip, which operates at a
frequency of 868 MHz, is directly connected to
the microcontroller, and is used for the
positioning system as well as for real-time data
transmission. This component is supplemented
by a dipole antenna to achieve greater ranges.
In addition, the commercially available
ultrasonic sensor US100 is connected to the
microcontroller to measure the utilization of
the forklift.
Since these modules require a nominal voltage
of 3.3 volts, suitable protected Li-Ion batteries
were selected for this purpose. With a capacity
of 13,800 mAh, the required runtime of about
three weeks can be guaranteed.
To protect the sensor modules and the power
supply from the harsh operating conditions in
industrial environments, a robust housing
consisting of two halves was designed and
produced by means of additive manufacturing.
A CAD model of the developed solution is
shown in Figure 3.
Industrial magnets are screwed into the housing
for easy mounting on the forklift. For this
purpose, hexagon nuts are inserted into the
housing. This screw connection also serves to
close the two halves of the housing.
The repeater consists of the same modules as the
Duck Box except the ultrasonic sensor. In addition to
the existing freely available gateways, a RaspberryPi-
based device equipped with a 3G SIM card is
temporarily placed in the area of operation.
The data from the gateway is transmitted to the
open-source network server The Things Network. To
be able to store the generated data, an interface to a
cloud-based SQL database was created by means of a
webhook integration and an automated online
workflow. The database contains the source-sink
relationships, the dwell times and the loading states
of the transport relations. This data is accessed using
a Tableau dashboard to visualise the collected data
appropriately. As part of the following case study, the
individual functions of the dashboard will be shown.
Figure 3: CAD model of the Duck Box.
4 CASE STUDY
4.1 Execution of the Case Study
The developed IPS was applied and evaluated during
a case study at a company in the building materials
industry. At the company's Austrian location, various
building materials such as mortar, adhesives and
sealants are produced, temporarily stored and loaded
into trucks. Due to the growth in production and the
associated growth in structures, transparency in
intralogistics was increasingly lost.
Since there were no applicable postings in
logistics, it was not possible to optimize the
company's material flows to increase the efficiency
and to achieve the sustainability goals in intralogistics
such as socially evenly distributed personnel
deployment or reduced energy demand.
For this reason, the developed prototype Duck
Box was used over a period of three weeks to create
the missing data basis. All five forklifts of the
finished goods storage were equipped with a Duck
Box. Fifteen material handling positions (sources and
sinks) were equipped with repeaters. The gateway
was used for data transmission.
The data evaluation was done using the developed
Tableau dashboard, which is shown in figure 4. This
dashboard consists of a layout in which the sources
and sinks are drawn by means of circles. The larger
the diameter of the circle, the longer the dwell time at
this position during material handling. In addition,
this figure is supplemented with a distance intensity
diagram. The further the distances and the more
frequently this transport relation is travelled, the more
critical this transport relation is. The most frequent
transport relations are displayed at the bottom of
figure 4. The light blue bars represent the empty runs,
the dark blue ones the loaded runs.
Duck Box: Sensor-Based Material Flow Optimization for Economically and Energy-Efficient Intralogistics
117
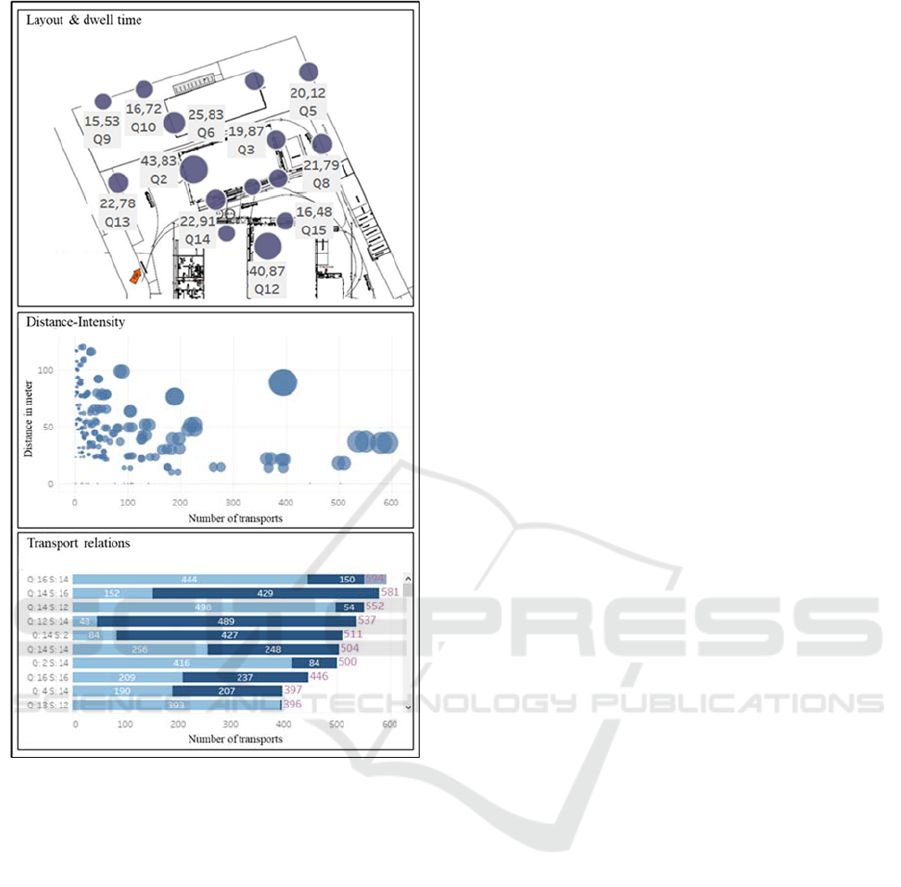
Figure 4: Visualization of the results.
Based on these results, the following optimization
potentials were identified:
The greatest transport intensity is caused by the
storage of finished goods in storage area Q13.
Due to the frequency of this transport in
combination with the long transport distance, a
concept was developed to minimize these
efforts by reorganizing the finished goods
storage areas. As a result, the entire warehouse
layout at the site was revised. Q13 was placed
closer to production to be able to reduce
transport intensities. Sinks that were only used
very rarely were placed at a greater distance
from production.
Furthermore, the utilization of all forklifts
showed that very often paired transports occur,
loaded in one direction and unloaded in the
other. As solution, it is planned to increase the
loading factor. Therefore, a forklift that
performs storage operations should be
equipped with long forks to be able to transport
two pallets per transport.
All forklifts are assigned to defined tasks. By
comparing them, it was found that the transport
tasks were very unevenly distributed due to this
fixed assignment. This resulted in high
workloads for some forklift drivers. A concept
has been developed for more even workloads
for forklift drivers, for example by no longer
loading trucks and swap bodies separately.
Finally, it was found that at source Q12, the
pick-up of finished goods, the dwell times were
twice as high compared to the other material
handling positions. By rearranging and
adapting the racks used there, handling
activities could be significantly reduced. In
particular, the short forward and reverse setting
of the forklifts was improved. This has made a
key contribution to increasing energy
efficiency in this area.
By implementing the specified measures, the
following optimizations could be calculated for this
specific case study:
Transport intensities could be reduced by up to
25 percent.
The utilization rates of the forklifts were
improved by at least 18 percent.
The energy efficiency of material transport in
the finished goods area was improved by up to
20 percent.
4.2 Validation of the Prototype
Regarding the Duck Box IPS, it can be concluded that
during the case study all components of the tracking
system operated stably and without interruption over
a period of three weeks. The data transmission via
LoRaWAN also worked without any problems. No
intervention in the company IT network was
necessary. The implementation effort was limited to
about one day. Although the Duck Box was mounted
on different forklift models, there was no impact on
the company's operational processes. The evaluation
within the case study shows that all defined
requirements are fulfilled by the Duck Box.
Compared to state-of-the-art IPS, the setup within
a day and without interfering the operations in
warehouse has shown to have significant potential.
For example, the use of the ultrasonic sensor made it
possible to collect utilization rates without applying
information carriers such as RFID tags to products.
The use of LoRaWAN for positioning and data
transmission significantly reduced the complexity of
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
118

the IPS. In addition, the implementation of a separate
IT network without interfering with the company's
infrastructure was beneficial. These measures
increase the usability of the IPS.
Since the developed IPS is designed for temporary
analyses of up to three weeks, the Duck Box IPS
shows disadvantages for permanent applications
compared to state-of-the-art solutions, e. g. due to the
need for regular battery charging. In future case
studies the scalability of the developed system with
increasing number of material handling positions and
forklifts must be evaluated.
The state-of-the-art in conventional material flow
planning shows different approaches to optimize
material flows. These methods usually assume an
optimal data basis. As Schwab et al. (2016) show, the
lack of available data limits the results of these
methods. The developed IPS demonstrates a sensor-
based approach that achieves novel, data-driven
results despite this lack of data, as shown in the course
of the case study. Recorded, actual transports,
utilization rates and dwell times have been used as the
data basis, which are partly difficult to determine with
conventional methods. In summary, the use of sensors
shows a significant added value for the creation of
holistic, valid and efficient material flow planning.
5 CONCLUSIONS
In this paper, a novel sensor prototype called Duck
Box is developed. This LoRaWAN and ultrasonic-
based IPS enables the implementation of sensor-
based material flow optimization. The data generated
in the process creates transparency in the
intralogistics of manufacturing companies by
recording the actual utilization, transport intensities
and material flows as well as dwell times of forklifts
without the need for posting data.
The evaluation of the prototype in a case study in
the building materials industry has shown that the
generated sensor data creates novel and holistic
material flow optimizations. In particular, the actual
utilization rates and determined transport intensities
show a clear added value in planning and have led to
optimization potentials of up to 25 percent in the
specific case study. In conclusion, the sensor used and
the data generated lead to the creation of more
economical and energy-efficient material flows.
The next step is to develop a dynamic
optimization algorithm based on the sensor data. This
algorithm will calculate recommendations regarding
the optimal utilization of forklifts, the ideal
distribution of tasks and the most effective
arrangement of sources and sinks in the layout. The
evaluation of the results is to be standardized
regarding economic and sustainability criteria.
REFERENCES
Barral, V., Suarez-Casal, P., Escudero, C.J., Garcia-Naya,
J.A. (2019). Electronics 2019, 8, 1152. p. 1-23.
Belić, D., Kunica, Z., Opetuk, T., Dukic, G. (2018).
Optimization of the plant layout in the production of the
special transformers: Case study in: FME Transaction,
46, 3, p. 285–290.
Bencak, P., Hercog, D., Lerher, T. (2022). Indoor
Positioning System Based on Bluetooth Low Energy
Technology and a Nature-Inspired Optimization
Algorithm. Electronics 2022, 11, 308. p. 1-27.
Borstell, H. (2016). Bildbasierte Ortung von Gabelstaplern
für sichere manuelle Transport-Prozesse im Umschlag-
Lager. in: Schenk M, editor. Ressourceneffiziente
Produktion und Logistik. Magdeburg: 18.
Forschungskolloquium am Fraunhofer IFF. p. 39-46.
Burinskiene, A (2015). Optimising Forklift Activities in
Wide-Aisle Reference Warehouse. Int. j. simul. model
14. p. 621-632.
Burinskiene, A., Lorenc, A., Lerher, T. (2018). A
Simulation Study for the Sustainability and Reduction
of Waste in Warehouse Logistics. Int. Journal of
Simulation Models 17. p. 485-497.
Chai, J., Wu, C., Zhao, C., Chi, H.L., Wang, X., Ling, B.,
Teo, K. (2017). Reference tag supported RFID tracking
using robust support vector regression and Kalman
filter. Advanced Engineering Informatics 32. p. 1-10.
Chayaphum, A., Supsomboon, S., Butrat, A. (2019). The
Optimal Number of Reach Trucks and Order Picker
Trucks in Warehouse Determining Using Simulation.
2019 Research, Invention, and Innovation Congress
RI²C. p. 1-5.
Ene, S., Küçükoglu, I., Aksoy, A., Öztürk, N. (2016). A
genetic algorithm for minimizing energy consumption
in warehouses. Energy 114. p. 973-980.
Ficco, M., Esposito, C., Napolitano, A. (2013). Calibrating
Indoor Positioning Systems With Low Effort. IEEE
Transactions on Mobile Computing 99. p. 1-14.
Fottner, J., Clauer, D., Hormes, F., Freitag, M., Beinke, T.,
Overmeyer, L., Gottwald, S.N., Elbert, R., Sarnow, T.,
Schmidt, T., Reith, K.B., Zadek, H., Thomas, F. (2021).
Autonomous Systems in Intralogistics – State of the Art
and Future Research Challenges. Journal Logistics
Research BVL 14. p. 1-41.
Frankó, A., Vida, G., Varga, P. (2020). Reliable
Identification Schemes for Asset and Production
Tracking in Industry 4.0. Sensors 20. p. 3709.
Fuc, P., Kurczewski, P., Lewandowska, A., Nowak, E.,
Selech, J., Ziolkowski, A. (2016). An environmental
life cycle assessment of forklift operation: a well-to-
wheel analysis. Int. Journal of Life Cycle Assessment
for Machines 21. p. 1438-1451.
Duck Box: Sensor-Based Material Flow Optimization for Economically and Energy-Efficient Intralogistics
119

Gladysz, B., Santarek, K., Lysiak, C. (2017). Dynamic
Spaghetti Diagrams. A Case Study of Pilot RTLS
Implementation. Intelligent Systems in Production
Engineering and Maintenance – ISPEM 2017. Springer
International Publishing. p. 238-248
Halawa, F., Dauod, H., Lee, I.G., Li, Y., Yoon, S.W.,
Chung, S.H. (2020). Introduction of a real time location
system to enhance the warehouse safety and operational
efficiency. International Journal of Production
Economics 224, 107541. p. 1-21.
Herbert, M., Heinlein, P., Fürst, J., Franke, J. (2021). A
systematic approach for planning, analyzing and
evaluating internal material provision. 30
th
International Conference on Flexible Automation and
Intelligent Manufacturing (FAIM 2021). Procedia
Manufacturing 55. p. 447-454.
Herion, L., Hunecke, C., Uckelmann, D. (2020). LoRa-
Technologie in der Logistik. Fabriksoftware 25. p. 41-
44.
Jung, M. (2018). Entwicklung und Evaluierung einer
kamerabasierten Lokalisierungsmethode für
Flurförderzeuge. Technische Universität München.
Kaluža, M., Beg, K., Vukelić, B. (2017). Analysis of an
indoor positioning systems. Zbornik Veleučilišta u
Rijeci 5. p. 13-32.
Kanakaraja, P., Kotamraju, S.K., Nadipalli, L., Kumer, A
(2021). IoT Enabled BLE and LoRa based Indoor
Localization without GPS. Turkish Journal of
Computer a. Mathematics Education 12. p. 1637-1651
Khoei, A.A., Süral, H., Tural, M.K. (2022). Energy
minimizing order picker forklift routing problem.
European Journal of Operational Research. p. 1-23
Krajcovic, M., Hancinsky, V., Dulina, L., Grznar, P., Gaso,
M., Vaculik, J. (2019). Parameter Setting for a Genetic
Algorithm Layout Planner as a Toll of Sustainable
Manufacturing. Sustainability 2019. 11. 2083. p. 1-26.
Li, Z., Lu, K., Zhang, Y., Li, Z., Liu, J.B. (2021). Research
in Energy Efficient Management of Forklift Based on
Improved YOLOv5 Algorithm. Journal of Mathematics
Volume 2021. p. 1-9.
LoRa Alliance (2015). LoRaWAN – What is it? A technical
overview of LoRa and LoRaWAN.
Martin, H. (2016). Transport- und Lagerlogistik.
Systematik, Planung, Einsatz und Wirtschaftlichkeit,
Springer Vieweg. Wiesbaden, 10th edition.
Mel, S., Herath, D., McKenzie, D., Pathak, Y. (2016).
Radio frequency (un)identification, Results from a
proof-of-concept trial of the use of RFID technology to
measure microenterprise turnover in Sri Lanka.
Development Engineering 1. p. 4-11.
Motroni, A., Buffi, A., Nepa, P., Pesi, M., Congi, A. (2021).
An Action Classification Method for Forklift
Monitoring in Industry 4.0 Scenarios. Sensors 2021. 21.
5183. p. 1-20
Müller, R., Vette-Steinkamp, M., Hörauf, L., Speicher, C.,
Burkhard, D. (2018). Development of an Intelligent
Material Shuttle to Digitize and Connect Production
Areas with the Production Process Planning
Department. Procedia CIRP 72. p. 967-972.
Pascacio, P., Casteleyn, S., Torres-Sospedra, J., Lohan,
E.S., Nurmi, J. (2021). Collaborative Indoor
Positioning Systems: A Systematic Review. Sensors
21. 1002. p. 1-39.
Pascher, R., Ecker, C., Sihn, W. (2019). Conceptual Design
of a modular, hybrid Sensor System (Duck Box) for the
Implementation of location-based Material Flow
Analysis. Proceedings of XXIII International
Conference MHCL 2019. p. 263-266.
Pashkevich, N., Haftor, D., Karlsson, M., Chowdhury, S.
(2019). Sustainability through Digitalization of
Industrial Machines: Complementary Factors of Fuel
Consumption and Productivity for Forklifts with
Sensors. Sustainability 2019, 11. p. 1-21.
Pieper, C., Lücke, B., Schuba, K., Schriegel, S., Jasperneite,
J. (2019). LoRaWAN-basiertes Intralogistikassistenz-
system. 10. Jahreskolloquium KommA –
Kommunikation in der Automation. Magdeburg. p. 1-12.
Pilati, F., Sbaragli, A., Regattieri, A., Cohen, Y. (2021).
Real time locating system for a learning cross-docking
warehouse. 11
th
Conference on Learning Factories,
CLF2021. p. 1-6.
Radhwan, H., Shayfull, Z., Farzizuan, M.R., Effendi, M.S.
M., Irfan, A.R., (2019). Redesign of bahulu production
layout to improve the efficiency of process flow. In:
APCOM 2019. Strbske Pleso, Slovak Republic. AIP
Conference Proceedings. 20153. p. 1-7.
Schwab, O., Zoboli, O., Rechberger, H. (2016). A Data
Characterization Framework for Material Flow
Anaysis. Journal of Industrial Ecology. 21. 1. p. 16-25.
ten Hompel, M., Kerner, S. (2015). Logistik 4.0. In
Informatik Spektrum 38. p. 176-182.
VDI 2498 (2011). Part 1: Procedure in material flow
planning. Fundamentals. p. 1-15.
VDI 2689 (2019). Manual of material flow investigations.
p. 1-40.
Wang, H., Cheng, T., Wu, Z.A. (2014). Research on
Positioning Algorithm of Forklift-mounted RFID
Reader. Sensors & Transducers, Vol. 174, Issue 7. p.
164-168.
Zajac, P., Rozic, T. (2022). Energy consumption of forklift
versus standards, effects of their use and expectations.
Energy 239. p. 1-16.
Zhao, K., Zhu, M., Xiao, B., Yang, X., Gong, C., Wu, J.
(2020). Joint RFID and UWB Technologies in
Intelligent Warehouse Management System. IEEE
Internet of Things Journal 7, 12. p. 11640-11655.
Zheng, Y., Baala, O., Caminada, A. (2010). Efficient design
of indoor positioning systems based on optimization
model. Wireless Days (WD) IFIP. p. 1-5.
Ziólkowski, A., Fuc, P., Jagielski, A., Bednarek, M. (2022).
Analysis of emissions and fuel consumption from
forklift by location of operation. Combustion Engines
2022, 189. p. 30-35.
SMARTGREENS 2023 - 12th International Conference on Smart Cities and Green ICT Systems
120
