
From Depth Sensing to Deep Depth Estimation for 3D Reconstruction:
Open Challenges
Charles Hamesse
1,2 a
, Hiep Luong
2 b
and Rob Haelterman
1 c
1
XR Lab, Department of Mathematics, Royal Military Academy, Belgium
2
imec - IPI - URC, Ghent University, Belgium
Keywords:
Depth Sensing, Depth Estimation, 3D Reconstruction.
Abstract:
For a few years, techniques based on deep learning for dense depth estimation from monocular RGB frames
have increasingly emerged as potential alternatives to 3D sensors such as depth cameras to perform 3D recon-
struction. Recent works mention more and more interesting capabilities: estimation of high resolution depth
maps, handling of occlusions, or fast execution on various hardware platforms, to name a few. However, it
remains unclear whether these methods could actually replace depth cameras, and if so, in which scenario it
is really beneficial to do so. In this paper, we show that the errors made by deep learning methods for dense
depth estimation have a specific nature, very different from that of depth maps acquired from depth cameras
(be it with stereo vision, time-of-flight or other technologies). We take a voluntarily high vantage point and
analyze the state-of-the-art dense depth estimation techniques and depth sensors in a hand-picked test scene,
in the aim of better understanding the current strengths and weaknesses of different methods and providing
guidelines for the design of robust systems which rely on dense depth perception for 3D reconstruction.
1 INTRODUCTION
In recent years, dense depth sensing and estimation
techniques have been the subject of significant re-
search efforts. In fact, depth perception is the corner
stone of portable 3D reconstruction systems, which
are necessary for numerous robotics applications such
as mapping, obstacle avoidance or autonomous navi-
gation. In many cases, being able to perform 3D re-
construction with sensors as small and light as possi-
ble is of great interest. To give an example, in various
emergency and military contexts, being able to per-
form 3D mapping to form a clear, up-to-date 3D rep-
resentation of a given environment is of critical im-
portance: improving the team’s situational awareness
will help to better execute operations and do better-
informed decisions. Also in these cases, it is likely
that 3D models will not be readily available, or sim-
ply outdated since the event creating the emergency
had a direct impact on the 3D environment. Using
the traditional rotating LiDAR devices for 3D recon-
struction is not be possible, as they are still heavy,
expensive and can be hard to navigate. Depth or
a
https://orcid.org/0000-0002-2321-0620
b
https://orcid.org/0000-0002-6246-5538
c
https://orcid.org/0000-0002-1610-2218
RGB-D cameras are cheaper and more easily moved
around, at the expense of a loss of sensing accuracy
and operational range. Technological developments
in depth sensing technologies bring depth perception
at a small form-factor and acquisition cost thanks to
the various technologies behind depth cameras: stereo
vision, structured light, time-of-flight or MEMS Li-
DAR
1
camera. With such cameras, 3D reconstruc-
tion is achieved with satisfying accuracy in a range
of scenarios, such as reconstructing a static object by
rotating smoothly around it, or mapping small scale
interior spaces (Zollh
¨
ofer et al., 2018). The 3D recon-
struction of dynamic large scale scenes, on the other
hand, remains the subject of much research (Wang
et al., 2021), (Yuan et al., 2022a). Going fur-
ther, using RGB cameras with a given deep learning
depth estimation method would be even more practi-
cal, as these cameras can be extremely small and con-
sume little power. The current deep learning literature
contains a wide range of algorithms to convert RGB
frames to depth maps. Learning-based algorithms
keep improving on the task of dense depth estimation
based on RGB frames (single-view depth estimation)
1
Microelectronechanical systems (MEMS) scanning
mirrors allow to build quasi-mechanical LiDAR devices
with low power and reduced size.
164
Hamesse, C., Luong, H. and Haelterman, R.
From Depth Sensing to Deep Depth Estimation for 3D Reconstruction: Open Challenges.
DOI: 10.5220/0011972900003497
In Proceedings of the 3rd International Conference on Image Processing and Vision Engineering (IMPROVE 2023), pages 164-171
ISBN: 978-989-758-642-2; ISSN: 2795-4943
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
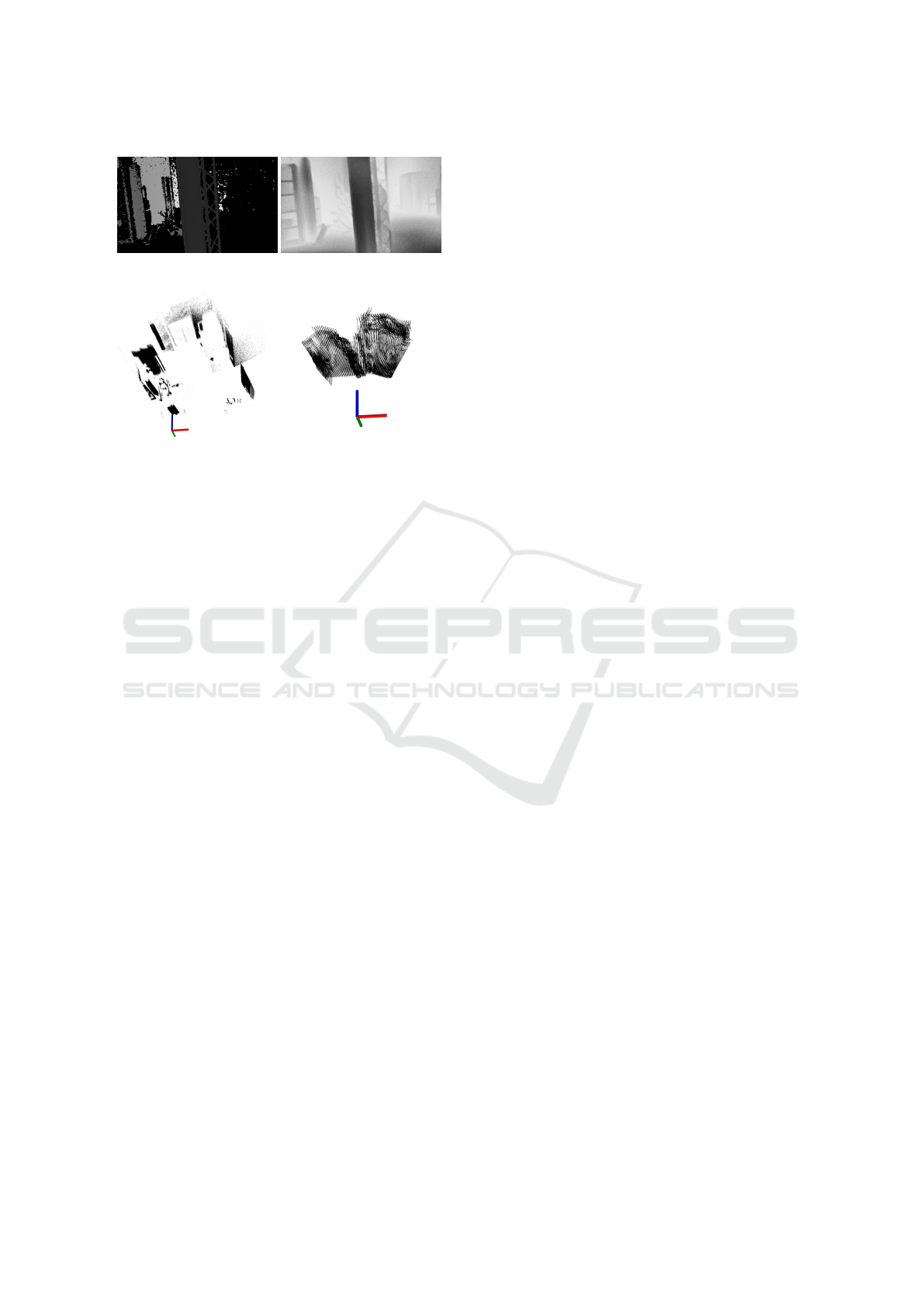
(a) Depth from L515 (b) Depth from SC-Depth
(c) Point cloud from L515
depth maps
(d) Point cloud from depth
maps estimated with SC-
Depth
Figure 1: Testing VoxelMap with 10 frames of a sequence
in a lab room featuring several closets, various equipment
and a central pillar. On the left, we use the depth maps from
the Intel Realsense L515. On the right, we use the depth
maps estimated with SC-Depth based on the RGB images
of the L515.
or sequences (multi-view depth estimation). Yet, we
fail to see these algorithms deployed in real-life oper-
ational scenarios. To illustrate our point, we show an
example execution of the probabilistic mapping sys-
tem proposed in (Yuan et al., 2022a) running on 10
depth maps acquired with an Intel Realsense L515
RGB-D camera, and 10 depth maps estimated with
the state-of-the-art SC-Depth algorithm (Sun et al.,
2022) on the RGB frames of that same camera in Fig-
ure 1. Clearly, the results are extremely different: the
L515 point cloud is relatively sparse but still geomet-
rically correct, but in the case of the deep depth maps,
registration simply fails. In fact, the errors present
in both of these depth maps are extremely different.
Therefore, instead of performing a quantitative anal-
ysis of a given technique or sensor as is commonly
done in the field, we propose a high-level, qualitative
analysis of i) the current state-of-the-art off-the-shelf
depth sensing cameras and ii) the latest methods for
depth estimation based on images taken with RGB
cameras. Our goal is not to compare depth sensors be-
tween themselves (see (Zhang et al., 2021), (Zollh
¨
ofer
et al., 2018) or (Tychola et al., 2022) for comparisons
of depth sensors) or depth estimation algorithms (see
(Ming et al., 2021), (Dong et al., 2021)), but rather
to compare the outputs of both categories in a more
practical manner.
The aim of this paper is not to provide a quanti-
tative benchmark or an exhaustive survey, but rather
to draw the main characteristics of both categories of
methods and their results. Doing so, we hope to give
the community useful insight on how to port exist-
ing 3D reconstruction systems from RGB-D sensors
to RGB cameras with deep depth estimation setups.
Our contributions are the following:
1. We propose an overview of the recent portable
dense depth sensors;
2. We propose an overview of the recent deep
learning-based methods for dense depth estima-
tion;
3. We execute a qualitative evaluation, analyze the
common failure cases of the methods in both cat-
egories, and discuss potential research directions
and implementation designs to alleviate these is-
sues.
2 RELATED WORK
We start with an overview of available depth cameras,
then proceed to review recent algorithms for depth es-
timation based on RGB frames or sequences.
2.1 Depth Sensing
Depth sensing technologies can be categorized in two
main groups: active and passive. Active depth sensing
methods include structured light, direct and indirect
time-of-flight (ToF). Passive methods include multi-
view such as stereo vision, depth from motion, depth
from defocus, etc. Recent depth cameras mainly use
active and passive stereo as well as time-of-flight, as
shown on our list of state-of-the-art sensors in Table
2. Their functioning can be summarized as follows:
• Passive stereo: using two forward-facing cameras,
the concept is similar to human binocular vision.
Corresponding feature points are found in the im-
age pairs, then the depth of these points can be
computed using the known baseline (distance be-
tween both cameras) and the coordinate displace-
ment these feature points in both frames. The Zed
Mini camera uses this technology (ZED, 2017).
• Active stereo: in addition to passive stereo, a
structured light pattern is projected on the scene
to help finding corresponding feature points. For
example, the Intel Realsense D455 can work with
passive or active stereo (Intel, 2020a).
• Indirect time-of-flight: an infrared wave is di-
rected to the target object, and the sensor array de-
tects the reflected infrared component. The depth
From Depth Sensing to Deep Depth Estimation for 3D Reconstruction: Open Challenges
165

Product Technology Range [m] Size [mm] Weight [g] Power [W]
Intel Realsense D455 Active stereo .6 - 6 124 x 26 x 36 390 3.5
Intel Realsense L515 MEMS LiDAR .25 - 9 61 () x 26 100 3.5
Microsoft Azure Kinect DK Time-of-Flight .25 - 3 103 x 39 x 126 440 5.9
Zed Mini Passive stereo .15 - 24 124 x 30 x 26 63 1.9
Figure 2: Main specifications of commonly used depth cameras. All the cameras listed in this table are tested in this work.
Range indicates the operational range given by the manufacturer.
of each pixel is computed using the phase dif-
ference between the radiated and reflected wave.
One such camera is the Microsoft Azure Kinect
V2 (Microsoft, 2020).
• Direct time-of-flight: a light emitter is directed to-
wards each point in the field of view of the sen-
sor to emit a pulse, then the depth is computed
using time taken for the pulse to come back to
the sensor. If using a laser, then these methods
are referred to as LiDAR. Directing the emitter to
scan the whole field of view of the device can be
done in different ways, e.g. with a mechanical ro-
tating device (traditional scanning LiDAR), solid-
state or MEMS. The recent Intel Realsense L515
implements the MEMS LiDAR technology (Intel,
2020b).
While all cameras have a similar power consumption,
we see clear discrepancies in size and weight, with the
Intel Realsense L515 and the ZED Mini being by far
lighter than the others. In this work, we will evaluate
all of the cameras referenced above.
2.2 Depth Estimation
Recent techniques to estimate dense depth maps from
RGB images rely on deep learning methods, and more
specifically, convolutional layers and Transformer ar-
chitectures (Vaswani et al., 2017). As always in
deep learning research, methods are trained and eval-
uated on certain datasets. The training dataset may
differ from the evaluation dataset. Naturally, the
performance of these methods in real-life scenarios
will be extremely dependent on the training dataset.
Therefore, we start with a brief review of the com-
mon datasets for depth estimation, then review the
state-of-the-art methods in different depth estimation
paradigms.
2.2.1 Datasets
The most commonly used datasets for depth estima-
tion are KITTI (Geiger et al., 2012), featuring road
scenes, and NYUDepth (Nathan Silberman and Fer-
gus, 2012), featuring indoor scenes similar to those in
which we are interested. The NYU dataset records
464 video sequences with an RGB-D camera (Mi-
crosoft Kinect). These video sequences cover a vari-
ety of indoor scenes, including living rooms, kitchen,
bathrooms. Other important datasets include SUN-
RGBD (Song et al., 2015), which aggregates RGB-D
images from several other depth datasets (NYU depth
v2, Berkeley B3DO (Janoch, 2012), and SUN3D
(Xiao et al., 2013)), captured with various depth cam-
eras. In total, SUN-RGBD contains 10 335 images.
When developing depth estimation algorithms, re-
searchers use the depth sensed from the depth camera
as ground truth.
2.2.2 Algorithms
We distinguish pure single-view depth estimation al-
gorithms from algorithms making use of multi-view
constraints.
Single-View Depth Estimation. State-of-the-art
methods in this category include DepthFormer
(Guizilini et al., 2022), which builds upon the
Transformer (Vaswani et al., 2017) to model the
global context with an effective attention mecha-
nism. BinsFormer (Li et al., 2022) also uses a
Transformer architecture but formulates depth pre-
diction as classification-regression problem (first pre-
dicting probabilistic representations of discrete bins
then computing continuous predictions via a linear
combination with bins centers). Another state-of-the-
art method is NeW-CRF (Yuan et al., 2022b), which
leverages Conditional Random Fields (CRFs) in a
custom windowed fully-connected manner to speed
up computation. All of these methods are trained and
evaluated on the NYUv2 and KITTI datasets. In our
experiment, we use DepthFormer and BinsFormer.
Multi-View Depth Estimation. A major issue with
single-view depth estimation is scale ambiguity.
Given a 2D RGB image, there is no way the neu-
ral network can compute the precise absolute depth.
Recent works attempt to correct the scale by using
multi-view depth consistency constraints during train-
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
166
ing. Current state-of-the-art multi-view depth estima-
tion methods typically require the computation of a
multi-view cost-volume, which offers good accuracy
but can lead to an important memory consumption
and a slow inference. MaGNet (Bae et al., 2022),
evaluated on 7-Scenes and ScanNet, aims to reduce
the computational cost by predicting a single-view
depth probability depth distribution, sampling this
distribution then weighting the samples using a multi-
view depth consistency constraint. TCMonoDepth
(Li et al., 2021), evaluated on NYUv2, enforces multi-
view depth alignment constraint during training, but
keeps the inference on a single frame. ViDAR (vir-
tual LiDAR) (Guizilini et al., 2022), proposes a new
cost volume generation method based on a specific
depth-discretized epipolar sampling method. Finally,
SC-Depth (Sun et al., 2022) uses image pairs as input
and synthesizes the depth for the second view using
the predicted depth in the first view and a rigid trans-
formation. In our experiment, we use TCMonoDepth
and SC-Depth.
Multi-View Depth Estimation with Camera Poses.
Learning-based methods that extend multi-view in-
formation with relative camera pose information pro-
vided by another system such as a SLAM algorithm
or another sensor have been proposed. Since external
information is needed to execute these methods, they
fall out of the scope of this paper.
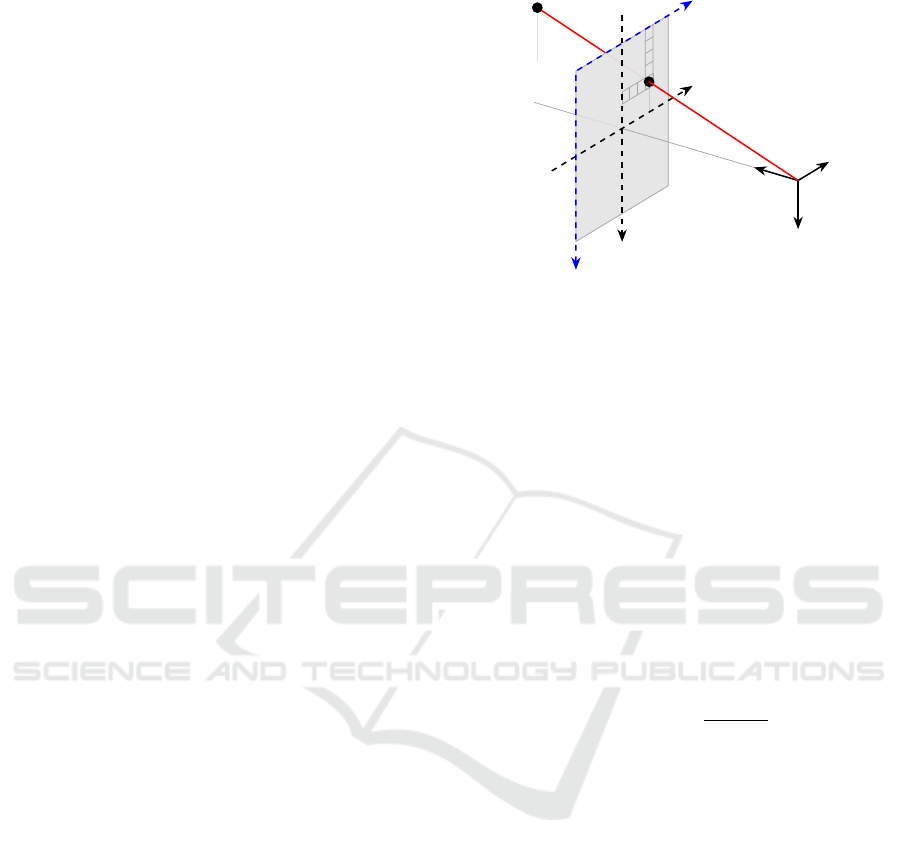
3 IMAGE FORMATION AND
DEPTH MAPS
Camera images are formed by projecting 3D world
points to the 2D image plane, then transforming them
to the 2D pixel space. The most commonly used cam-
era projection model in computer vision literature is
the pinhole model illustrated in Figure 3.
A depth map D ∈ R
H×W
, where H and W are the
height and width of the image in pixels, contains the
depth information of each pixel, i.e. the position of
the corresponding 3D point on the forward axis z
c
,
starting from the optical center. For a 3D point q =
[q
x
,q
y
,q
z
]
T
∈ R
3
and pixel coordinates p
x
∈ [0,W −
1], p
y
∈ [0, H − 1], we have:
D
p
x
,p
y
= q
z
for q s.t. p = π
K
(q)
(1)
where π
K
(·) is the camera projection operator asso-
ciated with the intrinsic matrix K. This operator and
its inverse π
−1
K
allow to convert depth maps to point
clouds and vice versa. For more information on cam-
era models and projections, we refer the reader to
(Hartley and Zisserman, 2003).
z = f
c
z
c
y
c
x
c
y
i
x
i
v
u
p
q
Figure 3: Camera projection model. (x
c
,y
c
,z
c
) is the cam-
era coordinate system centered around the optical center c,
(x
i
,y
i
) is the image plane coordinate system, and (u, v) is
the pixel coordinate system. The image plane is at a focal
length distance f of the optical center c and orthogonal to
the optical axis z
c
.
4 QUALITATIVE EVALUATION
We first define the principal criteria to which we will
pay attention during our evaluation:
• Point density, which must be high enough for a
satisfactory dense 3D reconstruction (this may de-
pend on the target application). It will depend on
the sensor resolution, field of view, and depth map
density (DMD). We can express the latter as:
DMD =
# points
H × W
(2)
• Bias and variance, which describe the errors in the
depth maps in terms of spread and distance from
the correct values;
• Connectivity and presence of ghost structures,
which relates how connected surfaces appear con-
nected in the depth maps (and associated point
clouds) and the opposite, whether wrong con-
nections between objects or wrong structures are
found.
To perform our test, we manually pick an indoor
scene, with the only constraints that it should be di-
verse (with various geometric shapes and textures)
and not degenerate (e.g. a flat white wall). We
show the scene chosen for our experiment in Figure
5. Since the goal is to complement the typical quan-
titative evaluations carried out in all research or spec-
ifications papers, our evaluation consists in a quali-
tative, visual inspection of the point cloud resulting
from the depth maps. Comparing the point clouds
from the same scene, resulting from different sensors
From Depth Sensing to Deep Depth Estimation for 3D Reconstruction: Open Challenges
167

(a) Zed Mini (Passive stereo) (b) Realsense D455 - Laser off (Passive
stereo)
(c) Realsense D455 - Laser on (Active
stereo)
(d) Azure Kinect DK (Indirect ToF) (e) Realsense L515 (Direct ToF) (f) Livox Avia (Solid-state LiDAR)
Figure 4: Point clouds obtained with various depth cameras and with the Livox Avia solid-state LiDAR for reference.
or techniques will allow us to draw high-level insights
on where these methods still fail to produce accurate
results. We also capture a reference point cloud of the
scene with a Livox Avia solid-state LiDAR (Livox,
2021).
We start with the evaluation of depth cameras on
our sample scene. All depth cameras are used with
default settings, except the Intel Realsense D455 with
which we capture the scene with the laser off (pas-
sive stereo) and on (active stereo). The resulting point
clouds are shown in Figure 4. On that figure, we also
put the point cloud acquired with a Livox Avia solid-
Figure 5: Our test scene. It features cluttered areas, pla-
nar surfaces, various materials and various reflections, parts
with external lighting (through a window), and parts with
poor lighting.
state LiDAR for reference. Note that different sensors
have different fields of view (FoV), which also affects
the general outlook of the point cloud.
• The Zed Mini (passive stereo) shows a very dense
but distorted point cloud, with an abnormal struc-
ture appearing far away above the lab door. The
distortion is expected, since the stereo matching
cannot be reliable in several areas of an indoor
setting with flat or texture-less surfaces. Then,
the structure above the lab door can be explained
since a stereo vision-only sensor cannot find fea-
tures to match and triangulate in a glass window
with the sky behind.
• The Realsense D455, in passive stereo mode,
shows much higher variance, and wave-like ghost
structures appear in the whole depth map.
• The Realsense D455, in active stereo mode,
shows increased accuracy in nearby structures (ta-
ble and chairs), but the wave-like structures re-
main present in the structures a few meters away
(closet, wall and door).
• The Azure Kinect DK, with its ToF sensor, has a
much wider field of view, an interesting property
for 3D reconstruction. It outputs slightly fewer
points, but exhibits low bias and variance: flat
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
168
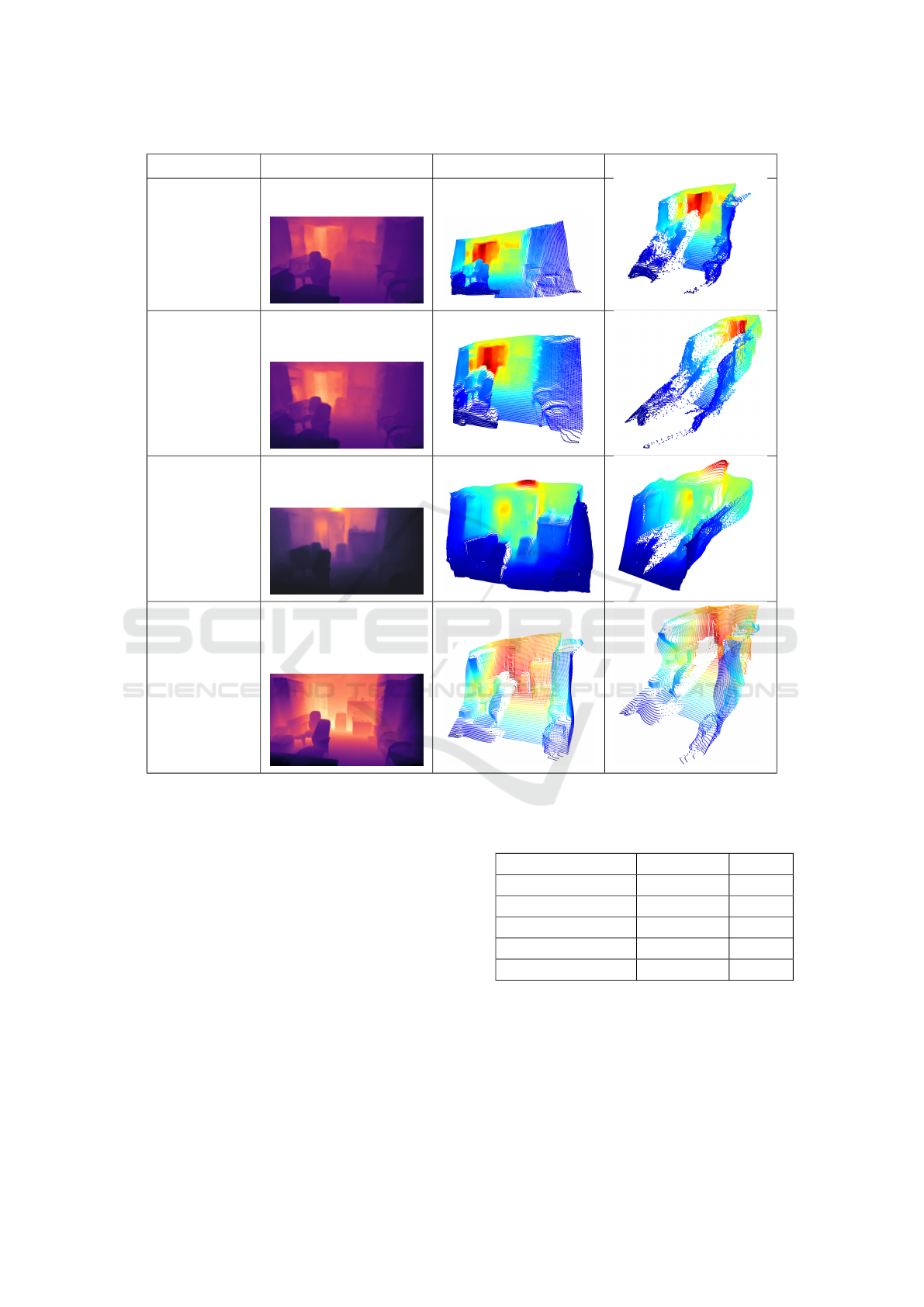
Algorithm Depth map Close point of view Distant point of view
DepthFormer
BinsFormer
TCMonoDepth
SC-Depth
Figure 6: Depth maps returned from the depth estimation algorithms, and reconstructed point clouds seen from two different
points of view. The coloring is relative to the position of the point on the forward axis.
structures are flat, with relatively small noise.
• The Realsense L515, using MEMS LiDAR,
shows good accuracy on nearby structures (table
and chairs), but this degrades with more distant
ones (wall, ground). However, the noise remains
lower than with stereo-vision sensors.
All of these results are very different. Now, it is
expected that stereo vision does not perform too well
in indoor settings, due to the lack of texture, relative
to outdoor environments. The depth cameras using
other modalities output better results on our test sce-
nario. Then, the ToF camera (Azure Kinect) shows
more reliable points. However, in this test, these two
systems also suffer from a decreased depth map den-
sity compared to the others, as shown in the following
table:
Table 1.
Depth camera Resolution Density
Zed Mini 1920 × 1080 96%
RS D455 - laser off 848 × 480 74%
RS D455 - laser on 848 × 480 90%
MS Azure Kinect DK 1024 × 1024 47%
RS L515 640 × 480 48%
We now move on to the deep learning-based dense
depth estimation algorithms. Since we are using an
indoor image for our tests, we use weights resulting
from training on the NYU Depth dataset. We feed the
same RGB image to DepthFormer, BinsFormer, TC-
MonoDepth and SC-Depth. The results are shown in
Figure 6, where we display the depth maps and the
From Depth Sensing to Deep Depth Estimation for 3D Reconstruction: Open Challenges
169

point clouds computed using the de-projection opera-
tor π
−1
K
. We use the intrinsic matrix K associated to
the camera with which the RGB image was taken. All
depth maps use the same “magma” color mapping,
although the absolute scale is estimated by each algo-
rithm. We display the point clouds from two points
of view, one close to the initial location of the cam-
era and one from a distant point of view. We do this
because, since the algorithms return fully dense depth
maps, it is hard to visualize the geometry of the point
cloud from the initial point of view. Again, point
clouds may appear to have different scales depending
on the depth map resolution and the estimated scale.
Additionally, we color the point clouds with a color
map relative to the position of the points on the for-
ward axis to better distinguish the different objects.
• The depth map from DepthFormer shows a slight
lack of detail in some structures, leading to ghost
connections (e.g. between the arms of the chairs).
Looking at the point cloud from a close point of
view does not reveal many errors besides an ex-
aggerated depth map smoothness (making uncon-
nected objects appear connected) and slight dis-
tortions. On the other hand, the distant point of
view highlights the heavy distortions in the geom-
etry of the wall and the closet.
• BinsFormer has a performance close to Depth-
Former, if we look at the depth map. The thin
structures appear slightly more detailed. How-
ever, we see with the distant viewpoint that the
scale is more wrong.
• TCMonoDepth has fewer details and the same er-
ror with the window above the lab door; it is esti-
mated to be far away. Another important error of
this model is also linked to exaggerated smooth-
ness: looking at the distant point of view, the walls
and closets appear very rounded.
• SC-Depth shows a great level of detail in the depth
map with very few wrong connections or ghost
structures. Albeit better than the previous models,
the walls and closets still look somewhat rounded
and distorted.
All of these methods produce relatively high resolu-
tion depth maps and contrarily to the depth cameras,
depth estimation neural networks output depth maps
without any hole. The scene can be recognized in
all depth maps, but not with the same level of de-
tail. Arguably the most important issue is the exag-
gerated smoothness: the whole point cloud appears
as a connected surface, lacking details (e.g., the void
between the chair arms is filled in three out of four
point clouds). Angles and surfaces are also severely
altered with all deep models. Finally, examining the
point clouds as seen from a more distant point of view,
we notice that the scale of these depth maps can be
wrong. But, to be fair, this is expected, as there is no
way an algorithm using only monocular images could
compute the absolute scale. Although not an error
of the algorithm, but rather a fundamental limitation,
this adds to the list of challenges to solve before using
these depth maps in real applications.
5 CONCLUSION
Let us start with the remark that both categories of
methods have clear strengths and shortcomings. None
of the propositions is really a definite go-to, one-size-
fits-all method. Although our evaluation only con-
siders a single image, fundamental characteristics ap-
pear to be common for all depth cameras or depth
estimation algorithms: depth cameras with ToF and
MEMS LiDAR technology provide accurate geome-
try, but have relatively fewer points. Depth estima-
tion algorithms rather suffer from geometry issues
such as exaggerated smoothness and distorted struc-
tures, but output fully dense depth maps. In the con-
text of 3D reconstruction with portable systems, depth
cameras with ToF or MEMS LiDAR are, for now,
more adequate: despite the lower number of points,
point cloud registration can still be achieved as the er-
rors in depth sensing remain mostly centered around
zero. Hence the abundant literature on 3D reconstruc-
tion with such sensors. Point cloud registration with
the geometrically-inaccurate clouds from deep depth
maps, on the other hand, is extremely challenging:
all points are very well grouped (low variance), but
not necessarily in the right place (high bias), which
makes the registration and fusion extremely difficult.
Considering the above observations, an interesting re-
search direction would be to fuse depth maps from
depth sensors with deep learning depth estimation
methods, i.e. performing depth densification.
ACKNOWLEDGMENTS
This work is part of the Scientific and Technological
Research of Defence Program of Belgium, and re-
ceived financial support by the Royal Higher Institute
for Defence under project name DAP18/04.
REFERENCES
Bae, G., Budvytis, I., and Cipolla, R. (2022). Multi-view
depth estimation by fusing single-view depth proba-
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
170

bility with multi-view geometry. In Proc. IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Dong, X., Garratt, M. A., Anavatti, S. G., and Abbass, H. A.
(2021). Towards real-time monocular depth estima-
tion for robotics: A survey. IEEE Transactions on
Intelligent Transportation Systems, 23:16940–16961.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In Conference on Computer Vision and Pattern
Recognition (CVPR).
Guizilini, V., Ambrus, R., Chen, D., Zakharov, S., and
Gaidon, A. (2022). Multi-frame self-supervised depth
with transformers. In Proceedings of the International
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Hartley, R. and Zisserman, A. (2003). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
New York, NY, USA, 2 edition.
Intel (2020a). Intel Realsense D455. https://www.
intelrealsense.com/depth-camera-d455/. [Online; ac-
cessed 20-November-2022].
Intel (2020b). Intel Realsense L515. https://www.
intelrealsense.com/lidar-camera-l515/. [Online; ac-
cessed 20-November-2022].
Janoch, A. (2012). The berkeley 3d object dataset. Mas-
ter’s thesis, EECS Department, University of Califor-
nia, Berkeley.
Li, S., Luo, Y., Zhu, Y., Zhao, X., Li, Y., and Shan,
Y. (2021). Enforcing temporal consistency in video
depth estimation. In Proceedings of the IEEE/CVF
International Conference on Computer Vision Work-
shops.
Li, Z., Wang, X., Liu, X., and Jiang, J. (2022). Binsformer:
Revisiting adaptive bins for monocular depth estima-
tion. arXiv preprint arXiv:2204.00987.
Livox (2021). Livox Avia. https://www.livoxtech.com/avia.
[Online; accessed 20-November-2022].
Microsoft (2020). Microsoft Azure Kinect DK. https://
azure.microsoft.com/en-us/products/kinect-dk/. [On-
line; accessed 20-November-2022].
Ming, Y., Meng, X., Fan, C., and Yu, H. (2021). Deep
learning for monocular depth estimation: A review.
Neurocomputing, 438:14–33.
Nathan Silberman, Derek Hoiem, P. K. and Fergus, R.
(2012). Indoor segmentation and support inference
from rgbd images. In ECCV.
Song, S., Lichtenberg, S. P., and Xiao, J. (2015). Sun
rgb-d: A rgb-d scene understanding benchmark suite.
2015 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 567–576.
Sun, L., Bian, J.-W., Zhan, H., Yin, W., Reid, I.,
and Shen, C. (2022). Sc-depthv3: Robust self-
supervised monocular depth estimation for dynamic
scenes. arXiv:2211.03660.
Tychola, K., Tsimperidis, I., and Papakostas, G. (2022).
On 3d reconstruction using rgb-d cameras. Digital,
2:401–423.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L. u., and Polosukhin,
I. (2017). Attention is all you need. In Guyon,
I., Luxburg, U. V., Bengio, S., Wallach, H., Fer-
gus, R., Vishwanathan, S., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 30. Curran Associates, Inc.
Wang, H., Wang, C., and Xie, L. (2021). Lightweight 3-d
localization and mapping for solid-state lidar. IEEE
Robotics and Automation Letters, 6(2):1801–1807.
Xiao, J., Owens, A., and Torralba, A. (2013). Sun3d: A
database of big spaces reconstructed using sfm and
object labels. 2013 IEEE International Conference on
Computer Vision, pages 1625–1632.
Yuan, C., Xu, W., Liu, X., Hong, X., and Zhang, F. (2022a).
Efficient and probabilistic adaptive voxel mapping for
accurate online lidar odometry. IEEE Robotics and
Automation Letters, 7:8518–8525.
Yuan, W., Gu, X., Dai, Z., Zhu, S., and Tan, P. (2022b).
Newcrfs: Neural window fully-connected crfs for
monocular depth estimation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition.
ZED (2017). ZED Mini . https://www.stereolabs.com/
zed-mini/. [Online; accessed 20-November-2022].
Zhang, S., Zheng, L., and Tao, W. (2021). Survey and eval-
uation of rgb-d slam. IEEE Access, 9:21367–21387.
Zollh
¨
ofer, M., Stotko, P., G
¨
orlitz, A., Theobalt, C., Nießner,
M., Klein, R., and Kolb, A. (2018). State of the art
on 3d reconstruction with rgb-d cameras. Computer
Graphics Forum, 37.
From Depth Sensing to Deep Depth Estimation for 3D Reconstruction: Open Challenges
171
