
Digital Twins for Trust Building in Autonomous Drones Through
Dynamic Safety Evaluation
Danish Iqbal
1 a
, Barbora Buhnova
1 b
and Emilia Cioroaica
2 c
1
Masaryk University, Brno, Czech Republic
2
Fraunhofer IESE, Kaiserslautern, Germany
Keywords:
Trust, Digital Twins, Safety, Autonomous Drones, Run-Time Compliance Checking, Autonomous Ecosystem.
Abstract:
The adoption process of innovative software-intensive technologies leverages complex trust concerns in differ-
ent forms and shapes. Perceived safety plays a fundamental role in technology adoption, being especially cru-
cial in the case of those innovative software-driven technologies characterized by a high degree of dynamism
and unpredictability, like collaborating autonomous systems. These systems need to synchronize their maneu-
vers in order to collaboratively engage in reactions to unpredictable incoming hazardous situations. That is
however only possible in the presence of mutual trust. In this paper, we propose an approach for machine-
to-machine dynamic trust assessment for collaborating autonomous systems that supports trust-building based
on the concept of dynamic safety assurance within the collaborative process among the software-intensive
autonomous systems. In our approach, we leverage the concept of digital twins which are abstract models
fed with real-time data used in the run-time dynamic exchange of information. The information exchange is
performed through the execution of specialized models that embed the necessary safety properties. More par-
ticularly, we examine the possible role of the Digital Twins in machine-to-machine trust building and present
their design in supporting dynamic trust assessment of autonomous drones. Ultimately, we present a proof
of concept of direct and indirect trust assessment by employing the Digital Twin in a use case involving two
autonomous collaborating drones.
1 INTRODUCTION
The rapid adoption of new technological advance-
ments within the automotive sector is causing ma-
jor security concerns with direct safety implications.
Consequently, approaches for co-analysis of safety
and security concerns are emerging (Cioroaica et al.,
2022b, 2021) with a particular focus on assuring the
safety of autonomous systems subject to communi-
cation errors caused by malicious attackers. A sig-
nificant technological transition towards improved lo-
gistic behavior is the provision of autonomous drones
that have the potential to enhance efficiency and op-
timized performance in various industrial applica-
tions (Utne et al., 2020). Autonomous drones are
anticipated to advance conventional transportation
mechanisms by bringing significant cost reduction,
improved safety and positive environmental impact.
a
https://orcid.org/0000-0002-5070-5880
b
https://orcid.org/0000-0003-4205-101X
c
https://orcid.org/0000-0003-2776-4521
With the growing risk of malicious attacks, how-
ever, the safety of the operational environment and of
the systems needs to be ensured. In the specific con-
text of trust, safety is an essential property (Avi
ˇ
zienis
et al., 2004). In our scenario, the updates of drones
with complex software behavior and advanced sen-
sors, actuators and advanced capabilities to commu-
nicate with other agents within the ecosystem, the
complexity of the operational domain increases con-
siderably. This aspect is of extended concern in situ-
ations when the increased autonomy of collaborating
autonomous systems relies on a trustworthy software-
hardware interaction. The complexity that the dy-
namic runtime updates bring within a smart digital
ecosystem highlights new challenges within the safety
community.
In general, together with the deployment of in-
novative technology within autonomous ecosystems,
the quality of information exchange plays an essen-
tial role (Tao et al., 2018). Namely, information can
be exchanged between two collaborating systems to
support trust building between them (Iqbal and Buh-
Iqbal, D., Buhnova, B. and Cioroaica, E.
Digital Twins for Trust Building in Autonomous Drones Through Dynamic Safety Evaluation.
DOI: 10.5220/0011986900003464
In Proceedings of the 18th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2023), pages 629-639
ISBN: 978-989-758-647-7; ISSN: 2184-4895
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
629

nova, 2022), when one system can share its planned
behaviour with its collaborator in an attempt to dis-
close information about it and foster trust building.
Digital Twin (DT), which is a virtual model reflect-
ing physical objects within the digital world, can be-
come such information, used in the exchange to sup-
port the trust-building process. In our case, this in-
formation needs to include the safety-relevant prop-
erties that can be dynamically evaluated at runtime.
The idea of employing DT of an autonomous agent
in building trust with its collaborator is very promis-
ing. So far, it has only been explored in (Iqbal and
Buhnova, 2022), where it is however unclear what in-
formation shall be included in the actual Digital Twin,
and how different safety rules could be reflected in it.
Dynamic safety analysis of collaborating au-
tonomous systems or agents within the autonomous
ecosystems is a challenging task for both the indus-
try and academia (Asaadi et al., 2020). To avoid
runtime exploitation of vulnerabilities of critical sys-
tems, runtime dynamic mechanisms that can perform
a safety assessment for concrete technical situations is
needed (Leng et al., 2021). The dynamic open context
of operation for autonomous systems implies that it is
constantly evolving, making it hard to anticipate how
safe an autonomous system will be in that context.
For autonomous systems, in particular, it becomes
challenging to dynamically evaluate the predicted be-
havior of the autonomous agent, which is why the DT
provided by the collaborator (trustee) can be of enor-
mous help. The trustor can then employ the DT of the
trustee in runtime compliance checking of the actual
trustee behaviour with its declared behaviour (deliv-
ered via the DT) (Cioroaica et al., 2022a). This is a
concept we elaborate in this work, with a focus on the
incorporation of relevant safety rules in the DT spec-
ification.
Consequently, in this paper, we present a
method for trust evaluation between collaborating au-
tonomous agents, used in the context of autonomous
drones, which employs the concept of a Digital Twin
(DT) enriched with safety properties. The DT can
be exchanged between collaborating agents with the
aim of building trust at runtime. By applying the
STPA (Systems-Theoretic Process Analysis (Dghaym
et al., 2021)) rules, we present a concept for dy-
namic safety evaluation used for building trust be-
tween collaborating autonomous drones. Moreover,
our dynamic safety evaluation approach aims to im-
prove risk assessment accuracy by employing com-
pliance checking for safe-behavior assessment. For
this, runtime behavior intentions are turned into vir-
tual trajectory distributions and are virtually analyzed
using behaviour-specific framework for hazard anal-
ysis. Our proposed hazard analysis framework sup-
ports the addition of safety attributes to the DT spec-
ification. Finally, we present a proof of concept to
illustrate the method on an example of collaborating
autonomous drones.
The paper is structured as follows. After the intro-
duction in Section 1, Section 2 describes the state of
the art, Section 3 illustrates our trust-building method
with safety assurance rules, Section 4 describes the
evaluation and Section 5 concludes the paper.
2 STATE OF THE ART
Safety is a highly desirable property that requires
assurance during the construction of systems that
operate within safety-critical autonomous ecosys-
tems (Widen and Koopman, 2022). The typical ap-
proach employed in the process of safety analysis
of autonomous safety-critical systems relies on the
identification of the causes of the system’s poten-
tial risks and uncertainties (Tauber and Schmittner,
2018). Then, based on the analysis of these risks
and uncertainties, measures to minimize the critical
system’s failure chances are implemented (Koopman
et al., 2021). In this context, this section discusses
the role of Digital Twins (DT) in connection to the
process of assuring safety and building trust in au-
tonomous safety-critical systems.
2.1 Trust Building via Employing
Digital Twins
The increasing uptake of autonomous drones, robots,
and similar AI-enhanced autonomous systems within
human societies requires an increased evaluation of
runtime trustworthiness of safe operation (Hancock
et al., 2011; Wagner, 2009). The significance of trust
has been highlighted in the human-robots interac-
tion (Kuipers, 2018), and has been widely researched
in psychology, management, economics and philos-
ophy (Lahijanian and Kwiatkowska, 2016; Huang
et al., 2019). An important aspect in the process of
building trust in autonomous systems needs to ac-
count for the dynamic safety evaluation of predicted
behavior. This can be done with the support of
run-time verification mechanisms (Vierhauser et al.,
2019), possibly with the help of Digital Twins (DTs)
used as a means of information exchange. In this pa-
per, we propose the employment of DT to integrate
the safety rules and mechanism to provide needed
safety information to a collaborator in order to sup-
port trust building among autonomous agents, follow-
ing the concept outlined in our previous work (Iqbal
ENASE 2023 - 18th International Conference on Evaluation of Novel Approaches to Software Engineering
630

and Buhnova, 2022).
Within various industries, IoT (Internet Of
Things) technologies are developed to meet the needs
of diverse systems such as robots, and intelligent de-
vices (Kochovski and Stankovski, 2018). In order to
keep up with the runtime needs of a system opera-
tion, the National Aeronautics and Space Administra-
tion (NASA) and the United States Air Force (USAF)
were the first to adopt the concept of DT used to pre-
dict the life span and maintenance of a spacecraft (Ne-
gri et al., 2017). The application of a DT then became
a popular approach used for synchronizing the phys-
ical world with the digital world (Liu et al., 2020; Qi
et al., 2021). Moreover, the interaction between the
physical world and the virtual digital world enables
systems in various industries to achieve high levels of
automation and intelligence (Boje et al., 2020). Many
studies and researchers employ the DT in various in-
dustrial sectors, such as Industry 4.0 and production
with the emergent potential of DT runtime execution
for building trust (Cioroaica et al., 2019).
2.2 Safety Analysis
Traditionally Leveson’s Systems-Theoretic Acci-
dent Model and Processes (STAMP) (Leveson and
Thomas, 2018) has been used as an accident model
based on system theory, improving reliability and
supporting conventional analytical reduction of risks.
The model primarily starts from the premise that ac-
cidents occur as a consequence of complex, dynamic
inter-related processes rather than as a result of a se-
ries of component failures.
Then, the systems-theoretic process analysis
(STPA) (Dghaym et al., 2021) is a hazard analysis
method that incorporates the fundamental concepts
of the STAMP accident causality models. STPA
is a top-down system engineering approach to as-
suring system’s safety that can be employed in the
early phases of system development with the scope
of creating high-level safety requirements and con-
straints (Plioutsias et al., 2018). However, the ap-
proach has limitations on supporting the generation
of a probability value associated to a hazard. This
happens because the strategy to compute an accident
probability requires the exclusion of critical causal
factors that are not stochastic or do not have prob-
abilistic data. Therefore, STPA aims to investigate
unsafe control actions by identifying the path to acci-
dents or risk scenarios (Ozerov et al., 2021). Then,
it incorporates causal factors that traditional analy-
sis techniques do not fully consider, such as: un-
controlled component interactions, incorrect require-
ments, insufficient coordination between multiple
controllers, and poor decision management (Pliout-
sias et al., 2018). As a result, unsafe behavior is
treated as a dynamic control problem rather than a
component’s reliability problem.
3 SAFETY-BASED
TRUST-BUILDING METHOD
By elevating from the traditional safety assurance pro-
cesses, in this paper, we propose the concept of dy-
namic safety assurance used for building trust be-
tween two autonomous agents based on run-time
compliance checking of trustee actual behaviour
against it declared behaviour provided in form of its
Digital Twin. To achieve this goal, we propose a
safety assurance process embedded within the Dig-
ital Twin by incorporating system’s properties that
emerge from applying the STPA process directed
towards dynamic safety evaluation. The proposed
safety method includes five steps, which are explained
in detail below.
The notion of trust relies on how effectively two
agents collaborate within an ecosystem. The collabo-
ration among autonomous agents can be divided into
two categories as direct and indirect trust (Buhnova,
2023; Byabazaire et al., 2020). The combination of
these trust-building elements can be explained further
with the help of Figure 1, which exemplifies how di-
rect and indirect trust contribute to the trust decision
of a trustor in relation to a trustee. Direct trust can be
built through the direct experience of the trustor with
the trustee and results from multiple interactions. In
our approach, the experience is gained via the com-
pliance checking of the trustee behaviour with its de-
clared behaviour incorporated within the DT that it
shares with the trustor. This is done to reflect two
major social metrics relevant to trust building, which
are: 1) honesty (consistency between the declared
and actual behaviour) and 2) openness (transparency
about the intended behaviour). On the other hand,
the indirect trust manifests the opinions of the neigh-
bors (peer network) and the gathered reputation of
the trustee from previous entities that have engaged
in collaborations with the trustee. We further detail
the role of the direct and indirect trust below.
For the definition of safe behavior, we have fol-
lowed the STPA process for deriving the unsafe action
control and identifying the causal factors, which are
categorized further in the safety assurance process.
Below we are detailing the steps in creating DTs that
can be used for the dynamic safety evaluation with the
Systems-Theoretic Accident Model, Processes Model
and Systems-Theoretic Process Analysis Technique.
Digital Twins for Trust Building in Autonomous Drones Through Dynamic Safety Evaluation
631
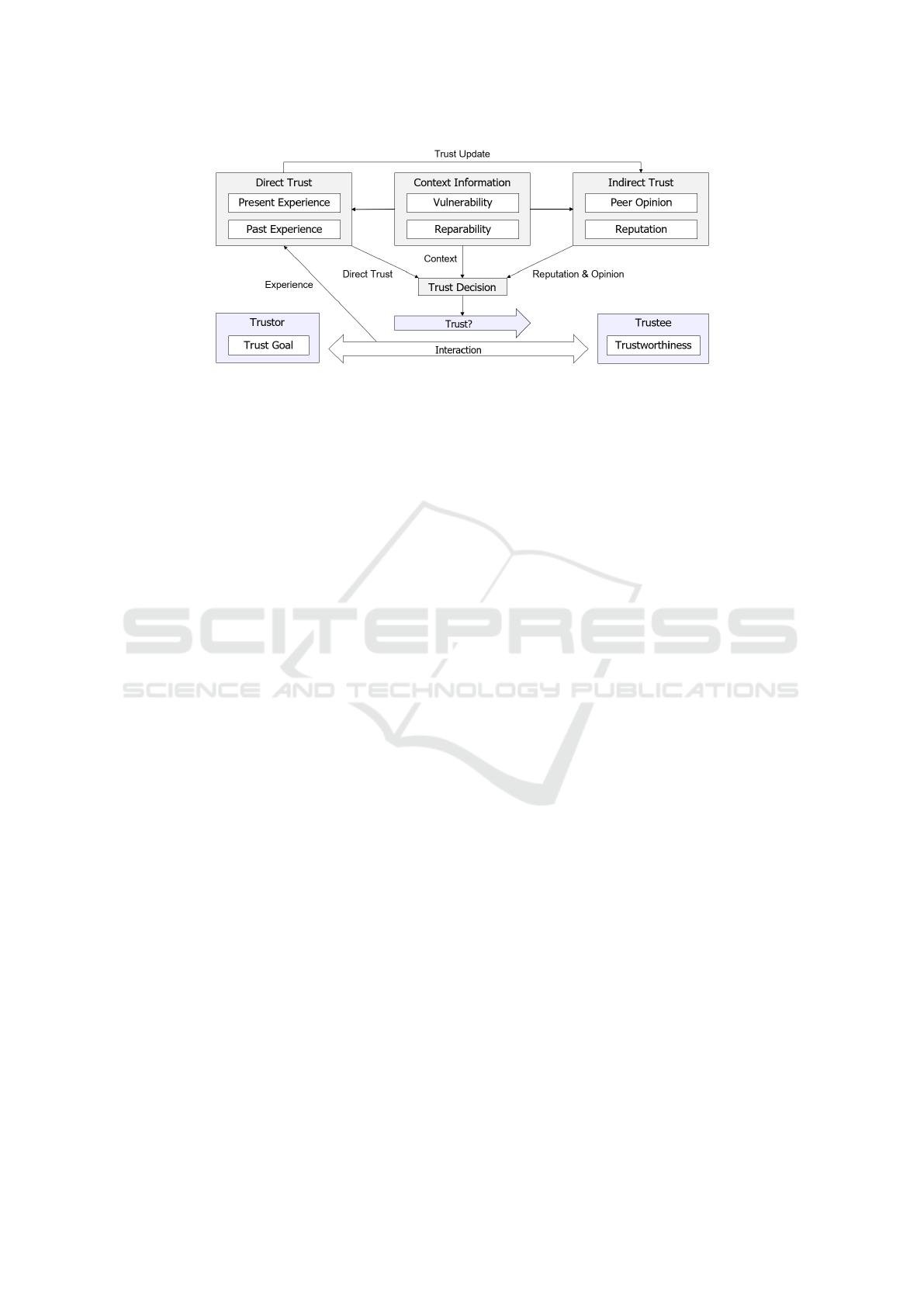
Figure 1: Direct and Indirect Trust (Buhnova, 2023).
3.1 Direct Trust via Run-Time
Compliance Checking
To assess the direct trust in agent-to-agent interaction,
we suggest to employ run-time compliance checking
among the collaborating agents with the help of the
Digital Twins, representing the declared behaviour
disclosed in the first phases of the trust building pro-
cess. The direct trust shows the direct experience of
the trustor with the targeted autonomous agent. More-
over, the direct trust of trustor agent in the trustee
agent is built through direct collaboration and run-
time compliance testing using the DT of the trustee
to check the consistency in their declared and actual
behaviour. If the trustee’s actual behavior matches the
declared behavior shared in the form of the DT while
taking the safety requirements into consideration, the
trust experience of the trustor reflects it into an in-
creased willingness to trust the trustee.
3.2 Derivation of Safety Rules via the
STPA Method
To assess the hazards and the associated factors in the
operation of a drone system, this section discussed
how to determine individual safety requirements. The
individual steps of the STPA process are discussed be-
low as a mechanism to specify the system under study
and the safety method scope.
STPA (Leveson and Thomas, 2018; Dghaym
et al., 2021) is a method for hazard detection that
uses control structures to represent the system behav-
ior. The hazardous conditions are identified through
the unwanted presence (commission), absence (omis-
sion), or improper timing (delay/wrong value) of con-
trol actions. Then the causal factors for unsafe control
actions are identified. by inter-playing formal speci-
fications in the verification process, the systems’ reli-
ability can be assured. Approaches that integrate for-
mal method with analysis techniques such as STPA
offer greater support for trust building in the system
based on safe and correct behavior that results in a
reliable runtime execution. Such a process can be di-
vided into three phases described below.
Phase 1: Hazard Identification and Analysis
In this phase, system-level hazardous events and ma-
jor risks of accidents are analyzed and identified. The
system-level safety limits are defined at the inter-
face of interaction with other components outside the
scope of the system. For our use case, we define how
unsafe control actions (UCA) and scenarios in which
the UCA may occur may violate system-level safety
restrictions and cause a transition into unsafe state
that can cause hazardous situations. The final step is
to identify the triggers of these hazardous situations
with greater chance of occurrence. These situations
act as preconditions, facilitators, or enablers. Figure 2
depicts the essential phases of identification of haz-
ardous situations and unsafe control action, which are
listed below.
• Step H1: Describe the system as an independent
control system by giving it a definition, including
its components and boundaries. For example, ac-
cording to hazards and accidents, the major com-
ponents of an autonomous drone system are the
physical drone, software controller and navigation
system. The larger context of use within dynamic
autonomous ecosystems account for the existence
of additional entities such as an ecosystem orches-
trator, collaborating drones and ecosystem actors
(businesses, field workers, etc.).
• Step H2: Define system-level hazardous events
and safety constraints. This is refined into the
identification of the controller responsibilities and
process variables.
• Step H3: Elaborate the unsafe control actions
(UCA) that violate the safety requirements and la-
ENASE 2023 - 18th International Conference on Evaluation of Novel Approaches to Software Engineering
632

Figure 2: Framework for Identification of Hazard, Unsafe Control Action and Casual Factors.
bel them according to the STPA process.
• Step H4: Define the procedure for feedback when
a hazard or accident occurs.
Phase 2: Identification of Unsafe Control Actions
The unsafe control action in Phase 2 is described as
follows:
• Step U1: The system-level problem is defined.
An accident example it is the crash of the physi-
cal drone system. How the overall system (physi-
cal drone, software controller, and navigation sys-
tem) or ecosystems (formed by the orchestrator
who implements the logistic algorithm together
with the communicating drones) responds to un-
safe control actions and accidents?
• Step U2: Hazard is defined in the unsafe con-
trol action as the Drone under evaluation is vio-
lating the minimum separation distance to another
drone, and what are the external control possibili-
ties, when the system fails to adhere to a safe be-
havior? In case of internal self-adaptation mech-
anisms, how does the system respond and recon-
figure itself in case of an hazardous situation?
• Step U3: When the hazard or accident is not
linked to a cause, then an external controlling en-
tity (that can be an ecosystem orchestrator that
implements intelligent logistic algorithms for re-
covery) needs to create a plan of action that in-
volves cooperation of the remaining drones and
actors within the ecosystem (such actors can be
businesses, but also engineers, and field workers,
etc.). In case of autonomous drone behavior, the
system needs to reconfigure and self-adapt itself
internally.
• Step U4: During an hazardous situation that man-
ifests in an accident, an important aspect of a re-
covery procedure is the time management that re-
flects by the capacity of the ecosystem, or of the
system itself to tackle the problem within a speci-
fied time frame.
• Step U5: As a general rule, the monitoring of the
failed system shall not stop too early during the
violation of the rules or during the unsafe control
action. Sometimes the system can come to track
in the ending phase.
Phase 3: Identification of Causal Factors
This phase is concerned with the identification of
causal factors, and is explained as follows:
• Step F1: Definition of the causes of hazards that
can lead to accidents, such as connection prob-
lems, environment negative influence, or trigger-
ing of internal faults that manifest into system
failure. Under these situations, the system action
need to be defined.
• Step F2: Definition of factors and risks to be an-
alyzed by the external controller (ecosystem or-
chestrator) or internal controller (in case of au-
tonomous behavior) and definition of a plan of
action to be communicated within the ecosystem.
This plan of action needs to be shared with other
ecosystem components (such as drones, ecosys-
tem actors that can intervene in case of an acci-
dent).
• Step F3: Develop a recovery path for the ecosys-
tem according to the different hazardous situa-
tions.
• Step F4: Develop a feedback mechanism that
accounts for the risk factors and correlated haz-
ardous situations. Such a feedback mechanism
supports the improvement of the recovery strat-
egy.
Digital Twins for Trust Building in Autonomous Drones Through Dynamic Safety Evaluation
633

3.3 Derivation of Safety Properties for
Dynamic Run-Time Evaluation
We start from the definition of the Digital Twins to
be abstract models fed with real-time data (Cioroaica
et al., 2022a). For the creation of digital twins used
for the dynamic evaluation of a system’s safety, the
safety properties need to be selected from the overall
behavior specification. This is performed following
a standardized safety procedures, such as the STPA /
Standard Safety procedure for Functional Safety.
The expected autonomous drone behavior relies
on the drone’s capabilities to execute core functions
(nominal and operational fail-over behavior) to per-
form its flying safely and efficiently. Figure 3 de-
picts the various functions of the system, which are
described as follows.
Flight Management System: The Drone is con-
trolled during flight using an intelligent mission
airspace management system. This system shifts the
human role of drone control through a specialized au-
tonomous controller. In order to ensure a safe be-
havior, and achieve a high-level safety goal, it im-
plements an internal dynamic risk management and
emergency control loop. To accomplish such goals,
the drone’s managing control system uses monitoring
of the controller specialized in autonomous flying (the
one that replaces human control) and feedback mech-
anisms to regulate communication between the sen-
sors, actuators and the drone’s other subsystems that
can be triggered in case of detected deviations.
Flight Navigation and Position System: A number
of functions is needed to perform way-point naviga-
tion and position of the Drone from the source to the
destination. First, flight planning and environment
monitoring are important components of a flight nav-
igation system. Then, a component for obstacle de-
tection is a key element on which the safe behavior
within the navigation phase relies. A fast detection
of obstacles can minimize the risk of hazardous situ-
ation. Third, the system’s reaction plan and its capa-
bility internally adapt to unforeseen events needs to
be considered.
Flight Safety Supervisor: A flight safety supervi-
sor is required in order to execute the flying mis-
sion safely and make decisions at the right time. The
ecosystem’s airspace safety restriction can protect the
drones from collisions. In context of multiple drones
that operate in an open environment together with
other systems, avoiding signal interference and phys-
ical safety violation distances are important for a safe
synchronized flight.
Environmental and Risk Monitoring: The Environ-
ment and risk monitoring component is essential to
execute the mission safely and avoid drone accident.
The timely reaction of the system relies on the proper
functionality of this component. Other role, this com-
ponent has is in minimizing the risk it imposes to the
environment, under special operating conditions such
as weather change. Moreover, the management of an
internal risk model and action plan according to traffic
conditions, unsafe control actions and obstacle signal-
ing needs to be implemented in order to ensure a safe
flight missions.
3.4 Derivation of Internal Behavioral
Transitions
Building trust in the autonomous drones over time is
facilitated by modeling physical information in the
form of a DT based on real-world system behavior.
With the help of run-time compliance checking, the
Digital Twins simulate the physical state of its cor-
responding autonomous drone. Recently, we have
in (Iqbal and Buhnova, 2022) shown that modeling
the interaction behaviour in form of a Digital Twin
can be a very promising way to establish trust be-
tween collaborating drones. In this paper, we propose
to build the DT on the basis of safety rules and con-
siderations discussed above, and present an example
of such DT model in the next section. During the cre-
ation of the DT, which can have e.g. form of a Finite-
State Machine (FSM), we consider the safety proper-
ties of an autonomous Drone as the major aspects to
be included. The safety properties are included ac-
cording to the STPA safety rules for the unsafe ac-
tion control. Finally, the design of the DT along with
the safety properties is explained in an example below
(and depicted in form of an FSM in Figure 4).
3.5 Indirect Trust via Reputation-Based
Derivation of Expected Cooperation
Safe collaboration between two drones can be re-
ported to contribute to the reputation-building of
the drones, and creation of direct and indirect trust.
The indirect trust can reflect the past experience of
the trusted neighbors and other nearby autonomous
drones that engaged in previous collaborations with
the target autonomous drone (the trustee). Some re-
searchers have previously associated experience and
reputation to explain indirect observation from a rep-
utable authority. As discussed above, in case an
ecosystem has an orchestrator, the orchestrator can
become the central authority that provides the evi-
dence and claim of trust for the trustee. on the other
side, the direct trust is navigated through a direct link
between the trustor and the trustee relying on the
ENASE 2023 - 18th International Conference on Evaluation of Novel Approaches to Software Engineering
634

Figure 3: Drone System Function.
trustor confidence that the trustee will carry out the
expected task. In this case, reputation aggregates all
the prior experiences with the trustee.
4 EVALUATION
This section presents a case study of developing
trust based on dynamic safety evaluation among au-
tonomous drones employed in the logistic domain. To
this end, we extract the case study components, walk
through the process over the use case, and present the
properties of the autonomous drone based on safety
regulation within the specific scenario. Then, we il-
lustrate the representation of these properties in the
form of an FSM used in the construction of the Digi-
tal Twin (DT) of an autonomous drone. Finally, based
on the DT and run-time compliance checking with the
actual drone behavior, we evaluate the behavior of the
drone, advising whether or not it can be trusted.
4.1 Use Case
Hussein et al. (2021) introduced a case study within
the logistics domain directed towards performing a si-
multaneous delivery to multiple locations at a feasible
price and in a timely manner. The use case addresses
the challenges of the access in remote areas that do
not have transportation infrastructure. The use case
generates two demonstrations to showcase the capa-
bilities of autonomous drones.
The first demonstrator objective is to deliver geo-
physical sensors by using a fleet of autonomous
drones, as an autonomous Drone can reach hard-to-
access locations. The Drone builds an innovative 3D
high-density geophysics solution that improves the
caliber of subsurface images and reduces costs and
environmental imprint.
The second demonstrator goal is to deliver a pack-
age in a hospital using a droid (to carry it inside a
building) and a drone (to carry it between buildings)
to accomplish fast delivery. The demonstration is ac-
complished in two stages. In stage one, which is the
longer one, the design of the droid and the Drone is
done in an industrial site to demonstrate the capabil-
ity of their coupling to transport light parts. The sec-
ond stage intends to replicate the industrial site ex-
periment in hospitals for transporting medicine or test
samples.
4.2 Properties Extraction
Iteration of the process over the use case is directed
towards providing evidence of validity via the steps
presented above. In the first step, we present the sce-
nario and the use case. In the second step, we ex-
tract the properties of the Drone use case by the safety
rules defined in Section 3 of the method. Then, fol-
lowing the safety process, we extract and incorporate
the safety rules within drones’ explicit behavior. The
third step involves modeling these attributes and inte-
grating the information that is presented in the form
of an FSM model representing the Digital Twin. In
the end, we explain the scenario within an example
that supports the trust decision.
4.3 Autonomous Drone Safety
Requirements
In this section, the properties of an autonomous drone
are extracted from the use case, following the safety
process in the method in Section 3. These properties
are based on the work of Plioutsias et al. (2018), fol-
lowing the drones safety analysis process.
Design-time Safety Requirements: The safety re-
quirements for an autonomous Drone in our approach
Digital Twins for Trust Building in Autonomous Drones Through Dynamic Safety Evaluation
635

consist of the following:
• The Drone system complies with civil aviation
norms, meaning that only drones that weigh less
than 20 kg are taken into consideration. This as-
pect is decided in the early phases of drone design.
A property of ”weight” can be explicitly commu-
nicated at runtime to a collaborator.
• The physical drone interaction with other compo-
nents such as sensor and flight controller were an-
alyzed with respect to items mentioned above.
• The civil aviation authority’s airspace safety reg-
ulations are taken into consideration.
• The civil aviation authority’s license requirements
and airworthiness standards are taken into consid-
eration.
Flight Management System: The safety properties
of the flight management and control system for au-
tonomous Drone are described below.
• The response to critical situations of the emer-
gency control system is considered in terms of
time property (too late, too early, non existent).
• Connectivity to the network with the control tower
is considered with respect to status (on/off) and
up/down time.
• Operation regulations for small drones are taken
into the consideration with respect to speed prop-
erties.
• Incident and accident report is considered for
specified period of up time (time of flying).
• Rules for external communication are followed
according to the safety regulation and quantified
as a ration: number of established communica-
tion/number of meetings.
Flight Navigation and Position (Collision Avoid-
ance): The following is a description of the safety
requirements and emergent safety properties for col-
lision avoidance to aid in the development of trust
among autonomous drones.
• The eventuality of collision with other flying
drones has been computed by involving the risk
management scheme and has been quantified.
• The Drone keeps updating the neighboring
Drones about the information of turning right or
left and increasing or decreasing the speed.
• The Drone establishes a minimum separation of
40 meters from other drones.
• The Drone implements check run-time signal in-
terference.
Environmental and Risk Modeling: The following
is a description of the environmental and risk model-
ing to execute mission safely flight and analyze the
environmental risk.
• The Drone implements the unsafe action control
to avoid external disturbance caused by weather
change.
• In bad weather conditions, the Drone increases
distance in order to maintain visibility and avoid
hazardous situations.
• The Drone continuously establishes connectivity
with the central ecosystem orchestrator in order
to receive help on avoid hazardous situations.
4.4 FSM Model of Drone Digital Twin
By integrating the engineering knowledge of the sys-
tem’s architecture and safety knowledge of nominal
and failure behavior in the early stages of system de-
velopment, state machines can be defined to support
the DT. After modeling the behaviour, safety infor-
mation can be reflected in the FSM in the form of
various states. Later on, as the specification of each
system component advances, the high-level models
are replaced with detailed sates of the FSM. The
safety knowledge can be integrated using a machine-
readable representation of system nominal and failure
behavior.
A simple example of FSM for a possible Digi-
tal Twin of an autonomous Drone is in Figure 4, to-
gether with the transitions between states that enable
the expression of the behavioral properties and inher-
ent safety properties. The contingency and collision
avoidance actions included in the FSM are based on
the work of (Hejase et al., 2018).
After defining the state machine for a system, en-
gineers identify the safety status of the system for
each state. The safety status is related to the initial
derivation of safety goals. Then, based on the state-
machine definition, actions for every state are defined
Figure 4: Digital Twin of an Autonomous Drone via FSM.
ENASE 2023 - 18th International Conference on Evaluation of Novel Approaches to Software Engineering
636
Table 1: FSM States and Description.
State Name Description
S1 Accelerate to Start S1 is the start state of the Drone, which is considered as off at the time. When the Drone is turned on, its state changes from S1
to S2.
S2 Air Trajectory Planner
Updates
The S2 state deals with updates to the air trajectory planner, which tracks adjustments to the autonomous Drone’s air trajectory.
If Drone is moving forward, it will transit from S2 to S3.
S3 Flight Navigation Up-
dates
The S3 state deals with flight navigation, and if an object is found, a transition to S5 is triggered; otherwise, the transition is
triggered to S8 (Drone signal interface).
S4 Decelerate to Stop S4 is the stop state of the Drone. As soon as the transition is complete, it goes to the end state. Whenever an unexpected event
occurs or an obstacle is detected, the Drone enters a stop state for a short time until the clear transition to S1 is completed.
S5 Object Detection The S5 state deals with object detection. A transition to the S4 (stop state) is initiated if an object is detected and takes a long
time to clear or if the Drone completes their transition. Unless the object is still detected, however, the transition is triggered to
the S6 state (contingency plan) to avoid the obstacle. If an object is still present, the transition to S7 (lane changing) state takes
place.
S6 Contingency Plan The S6 describes a contingency plan to prevent internal or external failure. If the action in the contingency plan is followed as
expected, the Drone starts moving forward and enters the S3 state.
S7 Lane Changing A lane changing is captured by S7. When a traffic obstruction is encountered, the Drone switches lanes; after changing lanes,
when normal flow resumes, start moving forward, which triggers the transition to S3.
S8 Drone Signal Inter-
face
The S8 state describes the drone signal interface. The signal interface state has three options for deciding the Drone next
transition. It is related to speed; therefore, the transition is triggered, resulting in the S9 state. If a lane change is required, the
transition is initiated, resulting in the S10 state, or the Drone needs to stop so the transition is triggered, leading to the S11 state.
When the Drone needs data for other flights, the transition is triggered to S3 (flight navigation updates).
S9 Speed Information The S9 state deals with speed information, and based on the situation, a transition to the states S20 (maintain distance), S21
(speed keeping), S22 (accelerate speed), S22 occurs (decelerate the speed), or the Drone returns to S8 (Drone signal interface).
S10 Lane Keeping Infor-
mation
The Drone expresses motion action that keeps the lane or changes to S12 (right turn), S13 (left turn), or S14 (level changing), or
the Drone returns to S8 (Drone signal interface).
S11 Stop Information The S11 state represents the situation when the Drone is advised to stop (S16) without details of the reasons, and if the issue is
analyzed as related to the environment, the transition is triggered to S15 (environmental issue) S15, or the Drone returns to S8
(Drone signal interface).
S12 Right Turn The S12 state represents the right turn. When the Drone makes a right turn in response to air traffic signal updates, follows the
path, and then needs to make a turn again owing to traffic problems, the transition to the S10 state is triggered.
S13 Left Turn The S13 state presents the left turn. The Drone changes the left turn according to the air traffic signal updates and follows the
path, and then needs to make a turn again owing to traffic problems, the transition to the S10 state is triggered.
S14 Level Changing The S14 state deals with the level changing. Depending on the path and other circumstances like the weather, the Drone adjusts
its level. When the Drone needs to change the direction so the transition is triggered to the S10 state.
S15 Environmental Issue The S15 state deals with environmental issues. The decision to discontinue was made because of environmental concerns. If the
environmental problem is severe, the transition to S11 state (stop information) is triggered in accordance with the circumstances.
S16 Brake The S16 describes the brake state. Breaking is needed, a decision about whether transition is triggered to S17(light brake) or S18
(strong break) or S19 (emergency brake) would happen according to the situation. Otherwise, the transition is triggered, to S11
(stop state).
S17 Light Brake The S17 state represents the Drone’s light braking owing to traffic or other Drones coming in the route. In case of an obstacle, a
transition is triggered to S16 (brake state).
S18 Strong Brake The S18 state represents the strong brake. Once the Drone reaches the stop position, and needs to change the state, a transition is
triggered to S16 state.
S19 Emergency Brake The S19 represents emergency brake, when unanticipated events happen that force the Drone to abruptly brake. The S19 state
(key to emergency braking) triggers a transition to S16 according to the situation.
S20 Maintain the Dis-
tance
The S20 state deals with distance maintenance. The S20 state is responsible for preventing Drone collisions and ensuring safety
by keeping an appropriate distance between the two Drones. After maintaining the distance, a transition is triggered to S9 state.
S21 Speed Keeping The S21 defines the speed keeping of the Drone. Until there is no conflict and the route is safe, the Drone maintains its current
speed, otherwise the state changes to S9.
S22 Accelerate the Speed The motion is expressed by the S22 state. When there is no conflict and the route is safe and clear, the Drone accelerates,
otherwise state changes to S9.
S23 Decelerate the Speed The S23 expresses the control action. The Drone decelerates the speed based on the recognized situations such as traffic, hazards,
objects, environments and states change information. Otherwise, a hazard is not present, the transition to S9 state is triggered
and the forward motion is resumed.
Digital Twins for Trust Building in Autonomous Drones Through Dynamic Safety Evaluation
637

in order to assure the safety of the overall system op-
eration. Consequently, every state then depicts a dis-
tinct operational context of the system by incorporat-
ing actions to reduce or eliminate unacceptable op-
eration risks within the context for which the safety
goals have been defined. The processing of the steps
depends on the specifics of an application scenario.
In a self-adaptive system, the actions become input
events to other automated controls.
4.5 Direct Trust via Run-Time
Compliance Checking
Based on the relevant hazard, emergency and back-
ground knowledge all the states and their transitions
are added to the autonomous Drone Digital Twin
through an FSM (see Figure 4). The aforementioned
DT properties are verified against the actual Drone be-
haviour via run-time compliance checking, where the
actual compliance serves as an evidence to increase
trust in the Drone. On the other hand, when the actual
behaviour deviates from the DT behaviour, indicat-
ing a violation of the declared contract and breaking
the trust, the Drone launches appropriate safety mea-
sures, e.g. avoiding the Drone, minimizing the speed
or stopping.
In our case, a collision risk between two au-
tonomous drones can be reduced by maintaining the
minimum distance and then maintaining the distance
as realized in S20 in Figure 4 in order to estimate the
future locations of an autonomous drone given its cur-
rent location, the way-points it is traveling to (the re-
maining mission), and the current speed and accelera-
tion. As the Drone periodically compares the received
locations with its own anticipated locations, Digital
Twin broadcasts its future locations.
4.6 Indirect Trust via Reputation-Based
Derivation of Expected Cooperation
Indirect trust is built over time based on third-party in-
teractions with the trustee drone. The established rep-
utation is a propagating property of trust. This form
of trust is important as it informs the other drones
about the past behaviour of the Drone in question.
Moreover, reputation is also based on the quality of
data assessment from the previous different compo-
nents, such as sensors or other nodes. In the proposed
scenario, the data is collected from different sources
and intelligent data monitoring saves the data that the
drones shared with each other in the from of DT. Later
on, these data can be used as a third-party source with
other agents, feeding the indirect trust.
5 CONCLUSION
This section discusses the key findings of the research
to better comprehend the trust building in ecosystems
using DT via dynamic safety evaluation.
First, we studied how the concept of dynamic
safety evaluation can support the building of trust
in the dynamic ecosystems. With the integration of
safety mechanism and run-time compliance checking,
we evaluated the trust in the proposed scenario. We
used the concept of a Digital Twin to capture the in-
formation from the physical objects. In the method,
we discussed both direct and indirect trust. The direct
trust can be obtained via run-time compliance check-
ing of the declared (DT) and actual behaviour of the
autonomous Drone, with the help of safety rules. The
indirect trust can be obtained through the reputation,
built form the data propagated from the third-party
past interactions and feedback.
Second, we evaluated the proposed method by
presenting a use case from the logistics domain where
two drones interact with each other following the
safety rules and using the DT for run-time compliance
checking to build the trust in one another. We also
discussed the direct and indirect trust on the practical
use case, with the direct trust based on the proposed
properties of the autonomous Drone and considering
the safety rules to design the DT of the autonomous
Drone in the form of an FSM. Finally, we presented
the trust/not trust example for collision avoidance.
In the future, we plan to improve the current de-
sign of the Digital Twin by including more detailed
behavior, presenting an enhanced model, and evalu-
ating the results via run-time compliance checking.
Finally, we plan to employ the trust assessment to val-
idate the model with more attributes and scenarios.
ACKNOWLEDGEMENTS
The work was supported by ERDF ”CyberSecurity, Cyber-
Crime and Critical Information Infrastructures Center of
Excellence” (No. CZ.02.1.01/0.0/0.0/16 019/0000822) and
”Internal Grant Agency of Masaryk University” (Reg No.
CZ.02.2.69/0.0/0.0/19 073/0016943), registration number
1254/2021.
REFERENCES
Asaadi, E., Denney, E., Menzies, J., Pai, G. J., and Petroff,
D. (2020). Dynamic assurance cases: a pathway to
trusted autonomy. Computer, 53(12):35–46.
ENASE 2023 - 18th International Conference on Evaluation of Novel Approaches to Software Engineering
638

Avi
ˇ
zienis, A., Laprie, J.-C., and Randell, B. (2004). De-
pendability and its threats: a taxonomy. In Building
the Information Society, pages 91–120. Springer.
Boje, C., Guerriero, A., Kubicki, S., and Rezgui, Y. (2020).
Towards a semantic construction digital twin: Direc-
tions for future research. Automation in Construction,
114:103179.
Buhnova, B. (2023). Trust management in the In-
ternet of Everything. In Proceedings of the
16th European Conference on Software Architecture-
Companion Volume, pages 1–13. Springer. Preprint at
http://arxiv.org/abs/2212.14688.
Byabazaire, J., O’Hare, G., and Delaney, D. (2020). Data
quality and trust: review of challenges and opportuni-
ties for data sharing in iot. Electronics, 9(12):2083.
Cioroaica, E., Buhnova, B., and Tomur, E. (2022a). A
paradigm for safe adaptation of collaborating robots.
In Proceedings of the 17th Symposium on Software
Engineering for Adaptive and Self-Managing Systems,
pages 113–119.
Cioroaica, E., Kar, S. R., and Sorokos, I. (2022b). Compari-
son of safety and security analysis techniques. In 14th
International Conference on Computational Intelli-
gence in Security for Information Systems and 12th
International Conference on European Transnational
Educational (CISIS 2021 and ICEUTE 2021), pages
234–242, Cham. Springer International Publishing.
Cioroaica, E., Kuhn, T., and Buhnova, B. (2019). (Do not)
trust in ecosystems. In 2019 IEEE/ACM 41st Inter-
national Conference on Software Engineering: New
Ideas and Emerging Results (ICSE-NIER), pages 9–
12. IEEE.
Cioroaica, E., Purohit, A., Buhnova, B., and Schneider,
D. (2021). Goals within trust-based digital ecosys-
tems. In 2021 IEEE/ACM Joint 9th International
Workshop on Software Engineering for Systems-of-
Systems and 15th Workshop on Distributed Software
Development, Software Ecosystems and Systems-of-
Systems (SESoS/WDES), pages 1–7.
Dghaym, D., Hoang, T. S., Turnock, S. R., Butler, M.,
Downes, J., and Pritchard, B. (2021). An stpa-
based formal composition framework for trustwor-
thy autonomous maritime systems. Safety science,
136:105139.
Hancock, P. A., Billings, D. R., and Schaefer, K. E. (2011).
Can you trust your robot? Ergonomics in Design,
19(3):24–29.
Hejase, M., Kurt, A., Aldemir, T., and Ozguner, U.
(2018). Identification of risk significant automotive
scenarios under hardware failures. arXiv preprint
arXiv:1804.04348.
Huang, X., Kwiatkowska, M., and Olejnik, M. (2019). Rea-
soning about cognitive trust in stochastic multiagent
systems. ACM Transactions on Computational Logic
(TOCL), 20(4):1–64.
Hussein, M., Nouacer, R., Corradi, F., Ouhammou, Y., Vil-
lar, E., Tieri, C., and Casti
˜
neira, R. (2021). Key tech-
nologies for safe and autonomous drones. Micropro-
cessors and Microsystems, 87:104348.
Iqbal, D. and Buhnova, B. (2022). Model-based approach
for building trust in autonomous drones through digi-
tal twins. In 2022 IEEE International Conference on
Systems, Man, and Cybernetics (SMC), pages 656–
662. IEEE.
Kochovski, P. and Stankovski, V. (2018). Supporting smart
construction with dependable edge computing infras-
tructures and applications. Automation in Construc-
tion, 85:182–192.
Koopman, P., Kuipers, B., Widen, W. H., and Wolf, M.
(2021). Ethics, safety, and autonomous vehicles.
Computer, 54(12):28–37.
Kuipers, B. (2018). How can we trust a robot? Communi-
cations of the ACM, 61(3):86–95.
Lahijanian, M. and Kwiatkowska, M. (2016). Social trust: a
major challenge for the future of autonomous systems.
In 2016 AAAI Fall Symposium Series.
Leng, J., Wang, D., Shen, W., Li, X., Liu, Q., and Chen,
X. (2021). Digital twins-based smart manufacturing
system design in industry 4.0: A review. Journal of
manufacturing systems, 60:119–137.
Leveson, N. G. and Thomas, J. P. (2018). Stpa handbook.
Cambridge, MA, USA.
Liu, Z., Zhang, A., and Wang, W. (2020). A framework for
an indoor safety management system based on digital
twin. Sensors, 20(20):5771.
Negri, E., Fumagalli, L., and Macchi, M. (2017). A re-
view of the roles of digital twin in cps-based produc-
tion systems. Procedia manufacturing, 11:939–948.
Ozerov, A. V., Olshansky, A. M., et al. (2021). Safety model
construction for a complex automatic transportation
system. Dependability, 21(2):31–37.
Plioutsias, A., Karanikas, N., and Chatzimihailidou, M. M.
(2018). Hazard analysis and safety requirements for
small drone operations: to what extent do popular
drones embed safety? Risk Analysis, 38(3):562–584.
Qi, Q., Tao, F., Hu, T., Anwer, N., Liu, A., Wei, Y., Wang,
L., and Nee, A. (2021). Enabling technologies and
tools for digital twin. Journal of Manufacturing Sys-
tems, 58:3–21.
Tao, F., Liu, W., Liu, J., Liu, X., Liu, Q., Qu, T., Hu, T.,
Zhang, Z., Xiang, F., Xu, W., et al. (2018). Digital
twin and its potential application exploration. Com-
puter Integrated Manufacturing Systems, 24(1):1–18.
Tauber, M. and Schmittner, C. (2018). Enabling security
and safety evaluation in industry 4.0 use cases with
digital twins. ERCIM News.
Utne, I. B., Rokseth, B., Sørensen, A. J., and Vinnem,
J. E. (2020). Towards supervisory risk control of au-
tonomous ships. Reliability Engineering & System
Safety, 196:106757.
Vierhauser, M., Bayley, S., Wyngaard, J., Xiong, W.,
Cheng, J., Huseman, J., Lutz, R., and Cleland-Huang,
J. (2019). Interlocking safety cases for unmanned au-
tonomous systems in shared airspaces. IEEE Transac-
tions on Software Engineering, 47(5):899–918.
Wagner, A. R. (2009). The role of trust and relationships in
human-robot social interaction. Georgia Institute of
Technology.
Widen, W. H. and Koopman, P. (2022). Autonomous ve-
hicle regulation and trust. University of Miami Legal
Studies Research Paper, Forthcoming, UCLA Journal
of Law and Technology.
Digital Twins for Trust Building in Autonomous Drones Through Dynamic Safety Evaluation
639
