
Impacts of Connected Automated Vehicles on Large Urban Road
Network
Qiong Lu
a
, Alessio Tesone
b
and Luigi Pariota
c
Department of Civil and Environmental Engineering, University of Naples Federico II, Naples, Italy
Keywords:
CAV, Large Urban Network, Maximum flow, Average Speed, Congestion Duration, Over-Saturation Degree.
Abstract:
As an essential component of the Cooperative Intelligent Transportation System (C-ITS), Connected Auto-
mated Vehicles (CAVs) are anticipated to play a significant role in the development of the future mobility
service. This paper investigates the impacts of different penetration of CAVs on the urban road network. The
investigation is carried out in a vast urban network with Simulation of Urban MObility (SUMO), a microscopic
traffic simulator. The estimated factors of the network are network maximum flow, critical density, average
speed, congestion duration, and roadway over-saturation degree. The Macroscopic Fundamental Diagram
(MFD) has been used to estimate the maximum flow and critical density. In a simulation way, it substantiated
that a road network could have less scattered MFDs, even if the traffic flow is distributed heterogeneously. The
congestion duration and over-saturation degree are used to check traffic congestion. The simulation results
show that applying 100% CAVs can contribute about a 13.55% increase in maximum flow. A similar trend
can be found in the critical density for different CAV penetration rates. In a similar congestion situation, the
network with 100% CAV driving in can carry more than 130% of the original travel demand. In terms of
congestion level, even a low CAV penetration rate may significantly improve the traffic condition.
1 INTRODUCTION
Nowadays, researchers support Connected Auto-
mated Vehicles (CAVs) improvements in traffic safety
and efficiency. However, quantifying the impacts of
CAVs is highly challenging. The challenge comes
from the uncertainty of how automated vehicles will
be introduced into our lives. For example, how will
the CAVs drive actually? Moreover, how will the
current traffic management methods change with the
CAVs, how will the road authorities minimize the
infrastructure required for the mixed traffic of man-
ual vehicles and automated vehicles, and the uncer-
tainty of CAV behaviors from different CAV com-
panies, etc.? Thus, the impacts of CAVs on traffic
should be first studied extensively. In the absence of
precise and massive amounts of data, a common way
to achieve this aim in current research is to perform
studies based on microscopic traffic simulation tools
(Raju and Farah, 2021).
CAV microscopic simulation studies were con-
ducted on many traffic topics, including ramp me-
a
https://orcid.org/0000-0002-0736-4320
b
https://orcid.org/0000-0002-8093-8175
c
https://orcid.org/0000-0001-9173-666X
tering(Liu et al., 2018; Xie et al., 2017), car fol-
lowing (Milan
´
es and Shladover, 2014; Wang et al.,
2015), traffic signals (Goodall et al., 2013), emissions
(Mersky and Samaras, 2016), road safety (Papadoulis
et al., 2019), and mixed traffic (Ye and Yamamoto,
2018). Most studies have differentiated CAVs and
human-driven vehicles (HDVs) by assuming that the
CAV driving behavior is less stochastic and consis-
tent. Simultaneously, CAVs have good lane disci-
pline.
Researchers used two main ways to model CAVs:
modifying the traditional car following and lane
changing models by adapting their parameters to the
supposed CAVs behavior (Lu et al., 2020), or by
defining some novel models directly to mimic CAVs
behavior (Treiber et al., 2000; Van Arem et al., 2006).
Some researchers modeled CAVs by changing the pa-
rameters of the inbuilt car-following models. How-
ever, the simulated CAVs were less realistic in com-
parison to the field behavior. The other researchers
applied numerous external algorithms to model the
CAVs. The main aim of the algorithms was to induce
communication among the vehicles. The CAVs were
governed by various models, including the Intelligent
Driver Model (IDM) (Treiber and Kesting, 2013),
378
Lu, Q., Tesone, A. and Pariota, L.
Impacts of Connected Automated Vehicles on Large Urban Road Network.
DOI: 10.5220/0011988000003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 378-385
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

the Optimum Velocity Model (OVM) (Maske et al.,
2019), Adaptive Cruise Control (ACC) (Van Arem
et al., 2006), Cooperative Adaptive Cruise Control
CACC.
Of course, the presence of CAVs, once seen ag-
gregately, alters the performance of supply elements,
such as link cost functions and network performances.
The impacts of CAVs have been investigated recently.
For instance, several researchers have investigated the
CAV’s impacts on the freeway capacity (Ghiasi et al.,
2017; Chen et al., 2017). Shi and Li (2021) pro-
posed a method to construct a freeway Fundamen-
tal Diagram for traffic flow mixed with AVs. They
analyzed 3 data sets related to different time head-
way values for CAVs. They concluded that differ-
ent headway settings would mainly affect road ca-
pacity. Hu et al. (2021) analyzed the changes in the
Macroscopic Fundamental Diagram (MFD) of an ur-
ban corridor with the HDVs and CAVs mixed traffic
flow. The majority of the simulation results demon-
strate that the road capacity has been improved with
the growth of the CAVs penetration rate, the increase
of CAVs platoon intensity, and the reduction of head-
way time. However, the conclusions are also different
due to the different settings of the time headway for
CAVs. Lu et al. (2020) had investigated the impacts of
AVs on the MFDs of urban road networks. The paper
assumed that AVs have a shorter time headway and
concluded that AVs’ popularization would enlarge the
network capacity. Mavromatis et al. (2020) investi-
gated the impact of AVs and CAVs on five large urban
networks (about 3 km × 3 km). They found CAVs
can significantly enlarge the traffic flow, decrease the
average trip time and reduce congestion. However,
they have yet to investigate the change in travel de-
mand that the road network can afford with the ap-
plication of CAVs. Tympakianaki et al. (2022) pro-
posed a framework to estimate the impacts of CAVs
on urban network performance. They investigated the
effects of the different penetration rates of CAVs on
network capacities. They found positive effects on ca-
pacities with the deployment of CAVs. Nevertheless,
the demand durations of the research on the impacts
of CAVs on large urban networks were only 1 hour
(Mavromatis et al., 2020; Tympakianaki et al., 2022).
There is a lack of research on the effects of CAVs on
network MFD curve and congestion level with pro-
portional increasing whole day travel demands.
In this regard, this research seeks to close this gap
by providing a thorough performance analysis of dif-
ferent CAVs penetration in a vast urban network with
daily travel demand. This paper defines congestion
duration and over-saturation degree as the key per-
formance indicators (KPIs) to evaluate the congestion
level of daily traffics. In particular, this paper quan-
tifies the impacts in terms of MFD, congestion level,
and accommodated travel demand. Specifically, the
objectives are:
• doing sensitivity analysis on CAV’s penetration to
see the impacts of CAV on urban MFD and con-
gestion level;
• proportionally scaling the demand to investigate
the change of travel demand that the road network
can carry.
The remainder of this paper is organized as fol-
lows: Section 2 presents the simulation setup and as-
sumptions of HDVs and CAVs. Section 3 discusses
the KPIs used to evaluate the impacts of CAVs. Sec-
tion 4 describes the numerical analysis and simula-
tion results. Finally, the findings and discussion are
presented in section 5.
2 METHODOLOGY
This section describes the CAV modeling and simula-
tion network.
2.1 CAV Modeling
In this work, a fully connected automated vehicle is
modeled based on microscopic traffic modeling. The
movements of a car are the result of both longitu-
dinal and lateral motions. The car-following model
reproduces the vehicle’s longitudinal actions, while
the lane-changing model dominates the lateral move-
ments. The parameters of car-following and lane-
changing models allow for fine-tuning of vehicle be-
haviors. These models have been demonstrated to be
useful for simulating traffic behavior and flow insta-
bilities (Treiber and Kesting, 2013).
Table 1: Vehicle models.
Parameters HDV (car) HDV (HGV) CAV (car) CAV (HGV)
Car-following
model
Krauss IDM
Speed factor
normal
(1, 0.1)
normal
(1, 0.1)
normal
(1, 0.05)
normal
(1, 0.05)
Time headway (s) 1.2 1.5 0.6 0.6
Lane-changing
model
LC2013
Cooperation 0.5 0.5 1 1
Strategic 0.5 0.5 1 1
Adopting a specific model for each type of ve-
hicle is not universally agreed upon in the litera-
ture. Table 1 shows the modelings of HDVs and
CAVs in this work. The HDVs, including private
cars and Heavy Goods Vehicles (HGVs), are mod-
eled with Krauss car-following model and LC2013
Impacts of Connected Automated Vehicles on Large Urban Road Network
379

lane-changing model because most vehicle features of
HDVs rely on these models (Lopez et al., 2018). The
Intelligent Driver Model (IDM) car-following model
and LC2013 lane-changing model are used to mimic
the behaviors of CAVs. The choice of parameters is
influenced by recent relevant works. Time headway
values have been adjusted to meet the related works
(Mahmud et al., 2017; Xie et al., 2019; L
¨
ucken et al.,
2019; Gu
´
eriau and Dusparic, 2020). The speed factor
of HDVs is assumed to follow a normal distribution
with a mean of 1 and a deviation of 0.1. While CAVs
are supposed to obey a normal distribution with mi-
nor deviation. Lane-changing parameters also vary
for different types of vehicles. CAVs are assumed
to be connected with each other and the infrastruc-
tures with Vehicle to Vehicle (V2V) and Vehicle to
Infrastructure (V2I) communications. This enabled
CAVs to show more excellent anticipatory behavior
in their routing strategy, leading to earlier strategic
lane changes when joining or leaving main streets.
Therefore, CAVs have higher values in cooperation
and strategic parameters.
2.2 Simulated Urban Road Network
This work investigates a huge-scale urban network,
represented in Fig. 1.
The simulated network is the Dublin city center,
covering 5 km × 3.5 km area, consisting of 483.4 km
of road with a typical daily demand. The daily traf-
fic demand pattern and volumes are generated from
real data. Several months of traffic data, excluding
holidays and weekends, are averaged to get a typical
workday traffic demand with 417997 trips (Gu
´
eriau
and Dusparic, 2020). A typical traffic demand should
consist of different traffic conditions, from free-flow
traffic via saturated traffic to congested traffic. The
free flow traffic demand is from 00:00 to 07:00. From
8:00 to 10:00, the simulation performs the morning
rush hours. From 17:00 to 19:00, the afternoon rush
hours occur. As the results show that the high CAV
penetration improves the network capacity. In or-
der to investigate the over-congested situation for the
higher level of CAV penetration scenarios, the origi-
nal demands are scaled up to guarantee enough con-
gestion in the simulation, since a high CAVs penetra-
tion rate could improve the network capacity.
2.3 Performed Scenarios
As shown in Table 2, six different deployments of
CAVs have been simulated to reveal the impacts of
different percentages of CAVs on the urban road net-
work. The first scenario A was run without CAV in-
Figure 1: Dublin city center network.
side the simulated network. The scenario A had been
used as a baseline for the comparison. Other scenar-
ios had a 20% increasing percentage of CAVs deploy-
ments from 20% to 100%.
Table 2: Simulated scenarios with different CAV penetra-
tion rates.
Scenarios HDV CAV
A 100% 0%
B 80% 20%
C 60% 40%
D 40% 60%
E 20% 80%
F 0% 100%
One wants to remark that all scenarios were sim-
ulated with a set of varying traffic demands to obtain
a congested traffic situation in each scenario in order
to explore a complete empirical network MFD. The
traffic demand had been increased to the final value
of 130%, with a 10% constant increment applied to
the original one.
3 NETWORK PERFORMANCE
METRICS
Many indicators can indicate the level of congestion
on the roadway. Some indicators are based on road-
way performance, such as average speed, flow, den-
sity, duration, etc. Others focus on a quantification of
the measurements into values that can then be used
to inform policy through cost-benefit analysis. In this
paper, maximum flow, critical density, average speed,
simulation statistics values, congested duration, and
roadway over-saturation degree have been used to re-
flect the traffic condition in the road network.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
380
3.1 Macroscopic Fundamental Diagram
(MFD)
MFD reveals the relationship between space-mean
flow, vehicle density, and average speed of a road
network. The concept of an MFD with an optimal
accumulated vehicle number was first proposed by
Godfrey (1969). Similar approaches were introduced
later by Herman and Prigogine (1979), and Daganzo
(2007). Geroliminis and Daganzo (2008) firstly veri-
fied its existence with the field experiment data col-
lected in downtown Yokohama. They proved that
MFDs could exist in urban neighborhoods, revealing
the relationship between space-mean flow and vehicle
accumulation in the network. They also stated that
there is a linear relationship between the network’s
average flow and its total outflow. They also found
that the MFD’s properties are related to the network
infrastructure and its control strategy, but not to the
traffic demand.
While, Geroliminis and Sun (2011) relaxed the
conditions for the existence of less scattered MFDs
for urban networks. They found that a strict homo-
geneous traffic is unnecessary to obtain well-defined
MFDs for a metropolitan area. However, the net-
work’s spatial distribution of car density is one of the
crucial factors affecting an MFD’s scatter and shape.
The MFD relates vehicle density in an urban net-
work to travel production (traffic flow). Denoted by
i are road edge segments between intersections. l
i
,
q
i
, and k
i
represent, respectively, the length, flow, and
density of the segment i. Then, one can calculate the
weighted average flow (q) and the weighted average
density (k) as
q =
Σ
i
q
i
l
i
Σ
i
l
i
; (1)
k =
Σ
i
k
i
l
i
Σ
i
l
i
. (2)
The maximum of the production (q
c
) represents the
overall urban network capacity at the critical vehicle
density (k
c
). Consequently, (k
c
, q
c
) is the critical point
on the urban MFD (Geroliminis and Daganzo, 2008;
Loder et al., 2019).
Therefore, the weighted average speed is v =
q
k
. It
is the average space mean speed within the reported
interval.
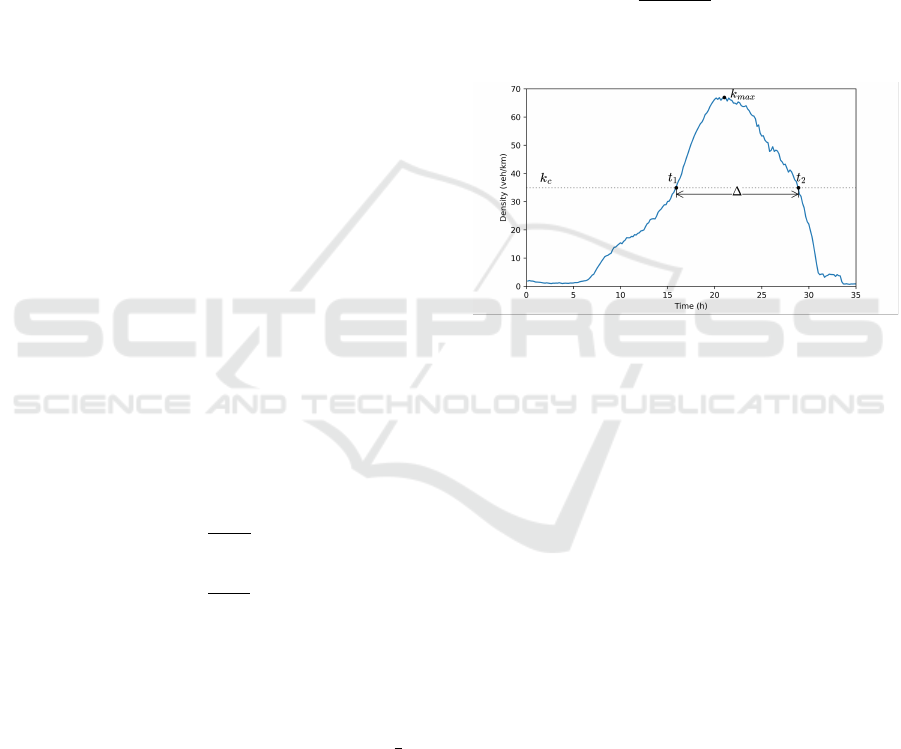
3.2 Congestion Duration and Roadway
Over-Saturation Degree
Congestion duration (in minutes) estimates how long
the congested traffic condition exists. We call it ∆ in
this paper, which can be evaluated with the following
equation (3):
∆ =
|
t
1
−t
2
|
, (3)
where t
1
and t
2
are the moments when the density be-
gins and ends with exceeding the critical density, re-
spectively.
Roadway over-saturation degree (S%) is the ratio
of observed maximum density to the critical density
of the roadway. It can be calculated with the equation
(4).
S% =
k
max
− k
c
k
c
× 100%, (4)
where k
max
is the maximum vehicle density during the
simulation.
Figure 2: Congestion duration and over-saturation degree.
All the parameters mentioned above are illustrated
in Fig. 2.
4 RESULTS
In this section, the simulation results have been pre-
sented and discussed in different scenarios.
4.1 Maximum Flow
As shown in Fig. 3, the scatter points are the data
collected from the simulation of different scenarios.
The MFD in this paper only considers the points
when the congestion forms, the dissipation of con-
gestion is not considered. This work aims to investi-
gate the maximum flow for different scenarios. The
legend of Fig. 3 shows the color and shape of dif-
ferent scenarios points. The demands of 80% and
100% CAVs scenario are 130% of the original de-
mand to get over congested traffic. Other scenarios
get over congested only with a demand of 120% of
the original demand. From Fig. 3, one can conclude
that the achieved maximum flow increases with the
increase in CAVs penetration rate. As the proportion
Impacts of Connected Automated Vehicles on Large Urban Road Network
381
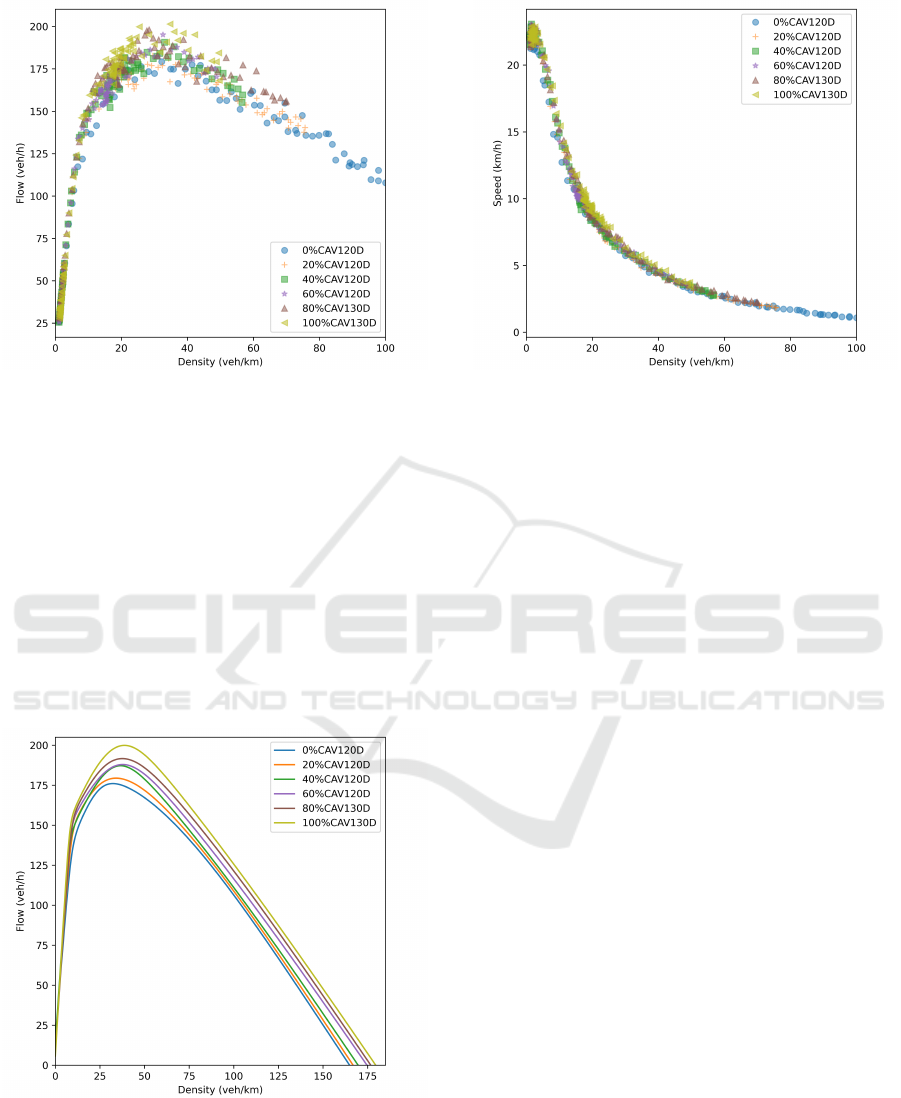
Figure 3: Flow density relationship.
of CAVs increases from 0% to 100%, the maximum
traffic flow of the Dublin road network increases by
approximately 13.6%, from around 176 vehicles/h to
200 vehicles/h. The critical density varies between
30 to 40 vehicles/km, as similarly happens in Tym-
pakianaki et al. (2022). This work estimated the crit-
ical densities for different scenarios to calculate the
congestion duration (∆) and over-saturation degree
(S%). With the available data, MFD curves are fit-
ted for each scenario to find the exact critical density
and maximum flow. As shown in Fig. 4, the curves
are plotted with an upper bound MFD (uMFD) intro-
duced by Amb
¨
uhl et al. (2020).
Figure 4: Fitted flow density relationship.
4.2 Speed
In Fig. 5, the empirical MFD relationships between
network average speed and density have been pre-
Figure 5: Speed density relationship.
sented for each performed scenario. The scenarios in
Fig. 5 are the same as those in Fig. 3. For the same
vehicle density, scenarios with higher CAVs penetra-
tion have relatively higher average speeds. This is in
line with the simulation results of Barcelona’s central
business district in Tympakianaki et al. (2022).
4.3 Simulation State
SUMO provides a statistical output that reveals over-
all information about the simulation. Table 3 shows
a part of the statistic results, the critical density, and
the maximum flow of different scenarios. As shown
in Table 3, the variable Vehicles means how many ve-
hicles are loaded and finished their trips. The speed
(in kilometers per hour) is the average trip speed. Du-
ration (in second) is the average trip duration. Wait-
ing time (in seconds) is the average time each vehicle
spends standing because of congestion or red traffic
light. Time loss (in seconds), including waiting time,
is the average time lost due to driving slower than the
desired speed. Route length (in meters) is the average
route length. Critical density and maximum flow were
obtained from the fitted MFD curves. Comparing the
average speed of different scenarios with the same
travel demand, we can find that the average speed in-
crease with a higher percentage of CAVs. From the
time loss and waiting time, one can conclude that it
is the waiting time that contributes much more to the
delay than the slower velocity. The maximum flow is
increasing with a higher CAV penetration rate. The
maximum flow of the network increased by 13.55%
with a 100% of CAV penetration rate. The improve-
ments in critical density and the maximum flow have
a similar trend.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
382
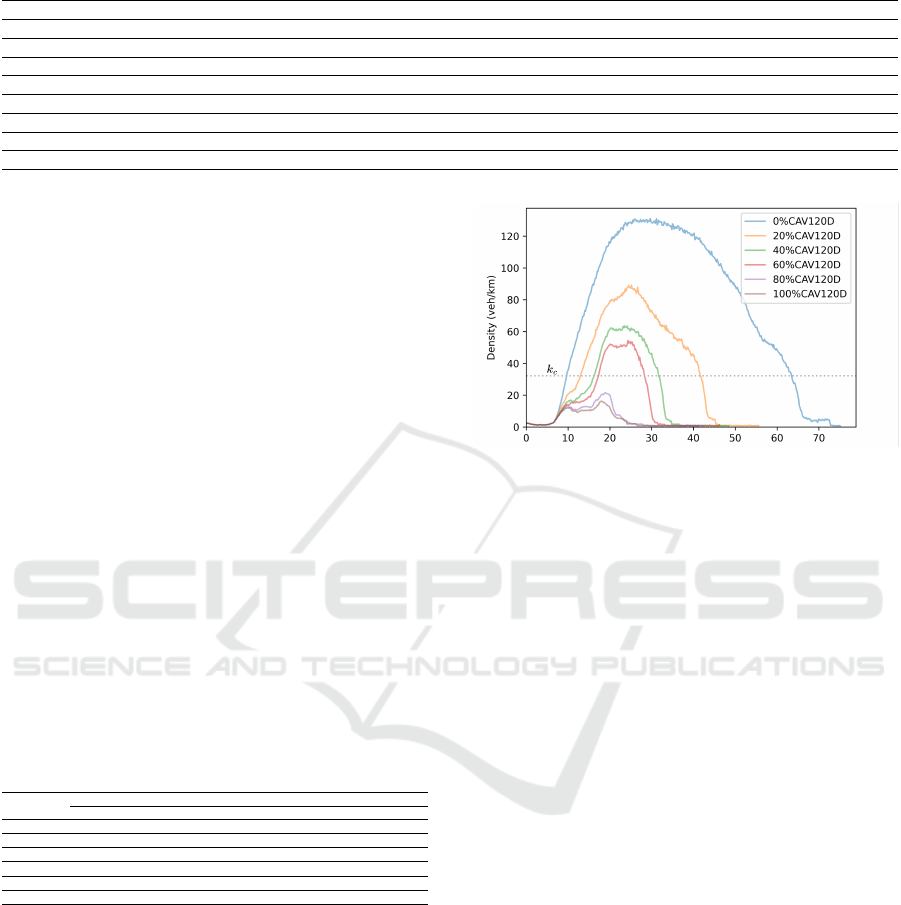
Table 3: Simulation state.
Scenario Vehicles Speed Duration Waiting time Time loss Route length Critical density Maximum Flow
0%CAV120D 501597 10.48 15986.35 13834.23 15331.16 5782.56 32.25 176.01
20%CAV120D 501597 14.04 5515.88 4401.23 5070.34 4478.76 34.02 (+5.49%) 179.39 (+1.92%)
40%CAV120D 501597 16.34 2718.95 2054.61 2397.55 3317.37 36.58 (+13.43%) 187.15 (+6.33%)
60%CAV120D 501597 17.50 1901.73 1382.55 1621.13 2927.44 37.75 (+17.05%) 187.90 (+6.76%)
80%CAV120D 501597 20.81 599.33 306.51 397.68 2138.77 - -
100%CAV120D 501597 21.85 482.1 224.89 293.78 2015.42 - -
80%CAV130D 543396 15.37 4108.37 3326.23 3707.46 4086.4 37.56 (+16.47%) 191.62 (+8.87%)
100%CAV130D 543396 16.92 2141.14 1630.65 1838.31 3153.62 38.74 (+20.12%) 199..86 (+13.55%)
4.4 Congestion Duration and Roadway
Over-Saturation Degree
From Table 4, one can evaluate that in the case of
100% or even 110% of the original demand, all HDVs
scenarios have already had considerable congestion.
However, congestion does not occur yet in other sim-
ulated scenarios. This shows that the introduction of
CAVs alleviates traffic congestion. When one looks
at the 120% of the original demand, the higher the
CAV penetration rate, the smaller the congestion du-
ration and over-saturated degree. Moreover, when
the CAV penetration rate is higher than 80%, one
will not observe over-congestion. The demand is in-
creased proportionally to observe the congestion in
80% and 100% CAV scenarios. When the demand
is increased to 130% of the original demand, conges-
tion appears in these two scenarios. When the de-
mand is increased to 130%, the 80% CAV penetra-
tion scenario have slightly heavier congestion than all
HDV scenario with the original demand. Moreover,
the full CAV scenario has lighter congestion than all
HDV with the original demand scenario.
Table 4: ∆ and S% for different scenarios.
Scenario 100% Demand 110% Demand 120% Demand 130% Demand
s% ∆ s% ∆ s% ∆ s% ∆
0%CAV 128.67 940 269 2290 306.32 3220 - -
20%CAV -63.22 0 -9.6 0 162.05 1700 - -
40%CAV -71.67 0 -52.72 0 73.92 880 - -
60%CAV -73.13 0 -63.69 0 44.21 600 - -
80%CAV -74.66 0 -66.39 0 -42.52 0 118.24 1300
100%CAV -78.43 0 -71.13 0 -58.03 0 52.67 680
When comparing the increase in maximum flows
and demands, one may see that even if the maximum
flow is increased only by 13.55%, the proportionally
increased demand that the road network can carry can
increase by more than 30%. This is because that trip
demand varies during the simulation.
Through Fig. 6, one can intuitively observe traf-
fic improvement with different CAV penetration rates.
Fig. 6 shows the accumulated vehicle density changes
during each simulation. The critical density shown
in the figure is the critical density of the full HDV
scenario. The demand of the illustrated scenarios is
120% of the original demand. The simulation without
Figure 6: Vehicle density changes during the simulation.
CAVs lasts more than 70 hours to finish. The running
time of other scenarios is obviously shorter. There-
fore, a low CAVs penetration rate, such as 20%, may
contribute much to reducing simulation time.
5 CONCLUSIONS
This paper investigated the impacts of different CAV
penetration rates on the urban road network. The
CAVs have been assumed to have shorter time head-
way, less speed deviation, and better lane-changing
cooperation. Dublin city center was selected as the ur-
ban network for this research. The MFDs were used
to illustrate the impacts on the road network’s max-
imum flow and average speed with different CAVs
penetration. This work verified that a road network
could have less scattered MFDs, even if the traf-
fic flow is distributed heterogeneously in a simula-
tion way. Congestion duration and roadway over-
saturation degree were introduced to show the ability
of different CAVs penetration to deal with the over-
congested situation. As detailed in section 4, 20 sim-
ulations with different CAV penetration rates and de-
mands had been run.
Simulation results show that the application of
CAVs benefits the maximum achieved flow of the ur-
ban road network. This conclusion is consistent with
previous researches that had demonstrated the ben-
efits of CAVs on urban traffic (Tympakianaki et al.,
2022; Mavromatis et al., 2020). As shown in the re-
Impacts of Connected Automated Vehicles on Large Urban Road Network
383

sults section, the maximum flow of 100% CAVs pene-
tration rate increased by approximately 13.55% com-
pared with the all HDVs scenario. Moreover, the im-
provements in critical density for different scenarios
have a similar trend with the maximum flow improve-
ments. In terms of congestion level, even a low CAV
penetration rate may greatly improve the traffic con-
dition. Table 4 shows that 20% of CAVs penetration
rate eliminates the congestion in the original demand
and 110% demand scenarios. In the 120% demand
scenario, 20% CAVs greatly reduce traffic conges-
tion level. Last but not least, when the CAV pene-
tration rate rises from 0% to 100%, the increase in
the proportional demand the network can carry under
the same congestion degree is much more significant
than the increase in the maximum flow. In this work,
the increase in the proportional demand is more than
two times the increase in maximum flow. This is due
to the introduction of CAVs reducing the congestion
level and making the congestion dissipate faster. At
the same time, a daily demand rather than a constant
demand enlarges the advantage.
However, there is a limitation in this study. The
traffic flow is heterogeneously distributed, which
means the transportation system still has untapped po-
tential. The capacity of the traffic system will be more
fully utilized if a control algorithm is used to control
the distribution of traffic as homogeneously as possi-
ble, which we leave as future work.
ACKNOWLEDGEMENTS
The research reported in this paper is part of the
project Prin 2020 DigiT-CCAM-Digital Twins per
la Mobilit
`
a Cooperativa, Connessa e Automatizzata
(project no. 2020Z9HEMJ) funded by the Italian
Ministry of the University and the Research.
REFERENCES
Amb
¨
uhl, L., Loder, A., Bliemer, M. C., Menendez, M., and
Axhausen, K. W. (2020). A functional form with a
physical meaning for the macroscopic fundamental di-
agram. Transportation Research Part B: Methodolog-
ical, 137:119–132.
Chen, D., Ahn, S., Chitturi, M., and Noyce, D. A. (2017).
Towards vehicle automation: Roadway capacity for-
mulation for traffic mixed with regular and automated
vehicles. Transportation research part B: method-
ological, 100:196–221.
Daganzo, C. F. (2007). Urban gridlock: Macroscopic mod-
eling and mitigation approaches. Transportation Re-
search Part B: Methodological, 41(1):49–62.
Geroliminis, N. and Daganzo, C. F. (2008). Existence
of urban-scale macroscopic fundamental diagrams:
Some experimental findings. Transportation Research
Part B: Methodological, 42(9):759–770.
Geroliminis, N. and Sun, J. (2011). Properties of a well-
defined macroscopic fundamental diagram for urban
traffic. Transportation Research Part B: Methodolog-
ical, 45(3):605–617.
Ghiasi, A., Hussain, O., Qian, Z. S., and Li, X. (2017).
A mixed traffic capacity analysis and lane manage-
ment model for connected automated vehicles: A
markov chain method. Transportation Research Part
B: Methodological, 106:266–292.
Godfrey, J. (1969). The mechanism of a road network. Traf-
fic Engineering & Control, 8(8).
Goodall, N. J., Smith, B. L., and Park, B. (2013). Traffic
signal control with connected vehicles. Transporta-
tion Research Record, 2381(1):65–72.
Gu
´
eriau, M. and Dusparic, I. (2020). Quantifying the im-
pact of connected and autonomous vehicles on traffic
efficiency and safety in mixed traffic. In 2020 IEEE
23rd International Conference on Intelligent Trans-
portation Systems (ITSC), pages 1–8. IEEE.
Herman, R. and Prigogine, I. (1979). A two-fluid approach
to town traffic. Science, 204(4389):148–151.
Hu, G., Lu, W., Whalin, R. W., Wang, F., and Kwembe,
T. A. (2021). Analytical approximation for macro-
scopic fundamental diagram of urban corridor with
mixed human and connected and autonomous traffic.
IET Intelligent Transport Systems, 15(2):261–272.
Liu, H., Kan, X., Shladover, S. E., Lu, X.-Y., and Ferlis,
R. E. (2018). Impact of cooperative adaptive cruise
control on multilane freeway merge capacity. Journal
of Intelligent Transportation Systems, 22(3):263–275.
Loder, A., Amb
¨
uhl, L., Menendez, M., and Axhausen,
K. W. (2019). Understanding traffic capacity of urban
networks. Scientific reports, 9(1):1–10.
Lopez, P. A., Behrisch, M., Bieker-Walz, L., Erdmann, J.,
Fl
¨
otter
¨
od, Y.-P., Hilbrich, R., L
¨
ucken, L., Rummel,
J., Wagner, P., and Wießner, E. (2018). Microscopic
traffic simulation using SUMO. In 2018 21st inter-
national conference on intelligent transportation sys-
tems (ITSC), pages 2575–2582. IEEE.
Lu, Q., Tettamanti, T., H
¨
orcher, D., and Varga, I. (2020).
The impact of autonomous vehicles on urban traffic
network capacity: an experimental analysis by mi-
croscopic traffic simulation. Transportation Letters,
12(8):540–549.
L
¨
ucken, L., Mintsis, E., Kallirroi, N. P., Alms, R., Fl
¨
otter
¨
od,
Y.-P., and Koutras, D. (2019). From automated to
manual - modeling control transitions with SUMO.
In Weber, M., Bieker-Walz, L., Hilbrich, R., and
Behrisch, M., editors, SUMO User Conference 2019,
volume 62 of EPiC Series in Computing, pages 124–
144. EasyChair.
Mahmud, S. S., Ferreira, L., Hoque, M. S., and Tavassoli,
A. (2017). Application of proximal surrogate indica-
tors for safety evaluation: A review of recent develop-
ments and research needs. IATSS research, 41(4):153–
163.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
384

Maske, H., Chu, T., and Kalabi
´
c, U. (2019). Large-
scale traffic control using autonomous vehicles and
decentralized deep reinforcement learning. In 2019
IEEE Intelligent Transportation Systems Conference
(ITSC), pages 3816–3821. IEEE.
Mavromatis, I., Tassi, A., Piechocki, R. J., and Sooriyaban-
dara, M. (2020). On urban traffic flow benefits of con-
nected and automated vehicles. In 2020 IEEE 91st
Vehicular Technology Conference (VTC2020-Spring),
pages 1–7. IEEE.
Mersky, A. C. and Samaras, C. (2016). Fuel economy test-
ing of autonomous vehicles. Transportation Research
Part C: Emerging Technologies, 65:31–48.
Milan
´
es, V. and Shladover, S. E. (2014). Modeling coopera-
tive and autonomous adaptive cruise control dynamic
responses using experimental data. Transportation
Research Part C: Emerging Technologies, 48:285–
300.
Papadoulis, A., Quddus, M., and Imprialou, M. (2019).
Evaluating the safety impact of connected and au-
tonomous vehicles on motorways. Accident Analysis
& Prevention, 124:12–22.
Raju, N. and Farah, H. (2021). Evolution of traffic mi-
crosimulation and its use for modeling connected and
automated vehicles. Journal of Advanced Transporta-
tion, 2021:1–29.
Shi, X. and Li, X. (2021). Constructing a fundamen-
tal diagram for traffic flow with automated vehicles:
Methodology and demonstration. Transportation Re-
search Part B: Methodological, 150:279–292.
Treiber, M., Hennecke, A., and Helbing, D. (2000). Con-
gested traffic states in empirical observations and mi-
croscopic simulations. Physical review E, 62(2):1805.
Treiber, M. and Kesting, A. (2013). Traffic flow dynamics.
Traffic Flow Dynamics: Data, Models and Simulation,
Springer-Verlag Berlin Heidelberg, pages 983–1000.
Tympakianaki, A., Nogues, L., Casas, J., Brackstone, M.,
Oikonomou, M. G., Vlahogianni, E. I., Djukic, T., and
Yannis, G. (2022). Autonomous vehicles in urban net-
works: A simulation-based assessment. Transporta-
tion Research Record, 2676(10):540–552.
Van Arem, B., Van Driel, C. J., and Visser, R. (2006).
The impact of cooperative adaptive cruise control on
traffic-flow characteristics. IEEE Transactions on in-
telligent transportation systems, 7(4):429–436.
Wang, M., Daamen, W., Hoogendoorn, S. P., and van Arem,
B. (2015). Cooperative car-following control: Dis-
tributed algorithm and impact on moving jam features.
IEEE Transactions on Intelligent Transportation Sys-
tems, 17(5):1459–1471.
Xie, H., Tanin, E., Karunasekera, S., Qi, J., Zhang, R.,
Kulik, L., and Ramamohanarao, K. (2019). Quan-
tifying the impact of autonomous vehicles using mi-
croscopic simulations. In Proceedings of the 12th
ACM SIGSPATIAL International Workshop on Com-
putational Transportation Science, pages 1–10.
Xie, Y., Zhang, H., Gartner, N. H., and Arsava, T. (2017).
Collaborative merging strategy for freeway ramp op-
erations in a connected and autonomous vehicles en-
vironment. Journal of Intelligent Transportation Sys-
tems, 21(2):136–147.
Ye, L. and Yamamoto, T. (2018). Modeling connected and
autonomous vehicles in heterogeneous traffic flow.
Physica A: Statistical Mechanics and its Applications,
490:269–277.
Impacts of Connected Automated Vehicles on Large Urban Road Network
385
