
Exploiting Relations, Sojourn-Times, and Joint Conditional Probabilities
for Automated Commit Classification
Sebastian H
¨
onel
a
Department of Computer Science and Media Technology, Linnaeus University, V
¨
axj
¨
o, Sweden
Keywords:
Software Maintenance, Repository Mining, Maintenance Activities.
Abstract:
The automatic classification of commits can be exploited for numerous applications, such as fault prediction,
or determining maintenance activities. Additional properties, such as parent-child relations or sojourn-times
between commits, were not previously considered for this task. However, such data cannot be leveraged well
using traditional machine learning models, such as Random forests. Suitable models are, e.g., Conditional
Random Fields or recurrent neural networks. We reason about the Markovian nature of the problem and
propose models to address it. The first model is a generalized dependent mixture model, facilitating the
Forward algorithm for 1st- and 2nd-order processes, using maximum likelihood estimation. We then propose
a second, non-parametric model, that uses Bayesian segmentation and kernel density estimation, which can
be effortlessly adapted to work with nth-order processes. Using an existing dataset with labeled commits as
ground truth, we extend this dataset with relations between and sojourn-times of commits, by re-engineering
the labeling rules first and meeting a high agreement between labelers. We show the strengths and weaknesses
of either kind of model and demonstrate their ability to outperform the state-of-the-art in automated commit
classification.
1 INTRODUCTION
The automated classification of changes, as occurring
during software evolution, is the subject of numer-
ous studies, e.g., (Purushothaman and Perry, 2005;
Fluri et al., 2007). Change is an omnipresent con-
cept in the lifespan of almost any software. Further-
more, software must change, otherwise, it will lose
its value over time, it rots or decays (Eick et al.,
2001). If technical debt is only accumulated but
not paid back, the decay will eventually result in
obsolescence. Lehman’s first law of software evo-
lution — Continuing Change — is thus essential for
proper software maintenance.
Changes provide valuable insight into, e.g., the
development process itself (Hindle et al., 2009).
Others exploit it for, e.g., fault localization or
-prediction (Purushothaman and Perry, 2005; Bell
et al., 2011; Shivaji et al., 2013). Change is rarely
documented well, if at all. The rationale for and the
reason behind changes, if not accessible, is hardly
comprehensible. Change may be obtained from a
number of sources, such as issue trackers, techni-
cal documentation, or source code versioning sys-
a
https://orcid.org/0000-0001-7937-1645
tems. We attempt the automatic classification of com-
mits added to software repositories, by using com-
mit metadata and features mined from the underlying
source code. Others have attempted to detect change
by, e.g., inspecting the commit message (Fu et al.,
2015; Levin and Yehudai, 2016). These features, as
well as other developer-level information, are often
unreliable or subjective. Therefore, we rely on objec-
tive (i.e., not subject to human error) features only.
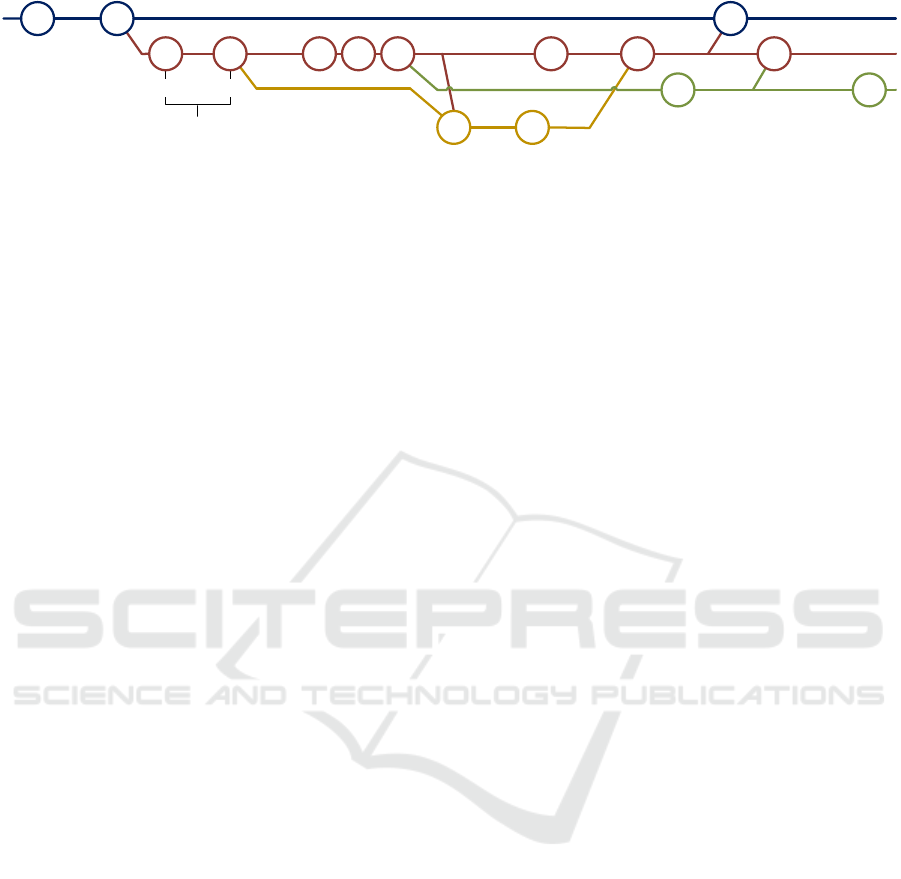
We take the size of the underlying source code, the
time between consecutive commits with direct parent-
child relations (sojourn-time, cf. Fig. 1), and some
mostly Boolean features describing further relations
(e.g., whether a commit was the first or last on its
branch), into account.
Software maintenance was suggested to be cate-
gorized into adaptive, corrective, and perfective ac-
tivities (Swanson, 1976). Adaptive changes comprise
the addition of new features. Corrective changes are
necessary to fix faults, correct behavior, or remediate
vulnerabilities. The most frequent occurring change,
however, is of perfective nature. Such changes are
made to, e.g., optimize the software, or to prepare
for the accommodation of future features. Beyond
these three categories, other subdivisions and exten-
HÃ˝unel, S.
Exploiting Relations, Sojourn-Times, and Joint Conditional Probabilities for Automated Commit Classification.
DOI: 10.5220/0012077300003538
In Proceedings of the 18th International Conference on Software Technologies (ICSOFT 2023), pages 323-331
ISBN: 978-989-758-665-1; ISSN: 2184-2833
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
323
C A
A C
A
C A
P
A
A P P P
C
A
Sojourn-time = t
2
- t
1
t
1
t
2
Figure 1: Exemplary Git branching, involving various purpose-bound branches. Sojourn-times are computed between con-
secutive commits on a branch. Merge commits are ignored in our study.
sions have been proposed (Lin and Gustafson, 1988).
However, most of the other literature seems to adapt
these three principal categories (Mockus and Votta,
2000; Levin and Yehudai, 2017b).
Furthermore, the focus of this paper is the efficient
exploitation of effortlessly accessible and objective
features, using models able to facilitate the relation-
ships of commits and sojourn-times between those,
for the purpose of commit classification into the three
principal maintenance activities. We reason about and
introduce various models that can be fitted to this kind
of problem. We show their theoretical and practical
limitations, their advantages and disadvantages, and
provide an overview of suitable models. Finally, we
demonstrate a solution to exploit relational datasets
using traditional, stateless classifiers, such as Random
forest (Breiman, 2001).
Notions
Before proceeding, we lay out the notions that we will
use from here on and after. Some sections use addi-
tional notions, and those are given there.
Symbols: We use a number of symbols, and these are:
a (scalar value), a (vector), A (two-dimensional ma-
trix), A (three- or higher-dimensional Tensor), f
j
i
or f
j
i
(j-th order (vector of) estimator(s) fixed on/segmented
over state i).
Order: Refers to the depth of the relations in a model
or dataset. A first-order model is one that computes a
probability of some observation O at time t using the
preceding observation t −1, e.g., P(O
t
|O
t−1
).
2 PROBLEM STATEMENT
Commits are sets of changes that are added as patches
to a software repository. These sets can comprise
any number of changes, such as added, modified, or
deleted lines or files. These differences can be quan-
tified, and models using such features represent the
current state of the art (H
¨
onel et al., 2020). Since two
consecutive commits C
t
,C
t+1
represent the software
repository at the two states t,t +1, we have measured
the difference in size between these two states, i.e.,
how many lines or files were affected, and by how
much. A commit’s maintenance activity is its associ-
ated state, that is, a commit labeled adaptive is said
to be in the state with the same name. The class of
a new commit (the state it transitioned into) is latent.
However, we can observe its features, as well as the
features and classes (states) of its preceding commits.
The main underlying conjecture for this paper is,
that taking into account relations, sojourn-times be-
tween commits, as well as mostly size-based features
significantly affect posterior distributions for some or
all of a commit’s features. The goal is to classify a
commit C at time t, that is, to assign it to one of the
three possible discrete states S
i
∈ S ={a,c, p} (adap-
tive, corrective, perfective). We hypothesize that de-
veloper behavior is not purely random, that is, it is
more likely to observe certain successions of activi-
ties than others. For example, a relatively small com-
mit that quickly follows a large adaptive commit is
more likely to be of corrective or perfective nature.
Mathematically, we reason that the conditional pos-
terior probability for a chain of k preceding commits
(Eq. 1) is significantly different from P(C
t
= S
i
).
θ ... feature vector of a commit,
P(C
t
= S
i
|θ
t
, ..., θ
t−k
∧C
t−1
= S
j
, .. ., C
t−k
= S
n
).
(1)
In other words, we hypothesize that commit clas-
sification models can benefit from additionally ex-
ploiting preceding commits’ features θ
t
, .. ., θ
t−k
, as
well as their known classes C
t−1
= S
j
, .. ., C
t−k
= S
n
.
Given the stateful nature of this problem, we argue
that models that capture transitions and (conditional)
transition probabilities are suitable for this task.
2.1 Scope
Developers tend to bulk-commit unrelated changes,
resulting in tangled commits (Kirinuki et al., 2014).
However, our own labeling has shown that most of
the commits are still assignable to a single princi-
pal maintenance activity. The existence of tangled
commits is further somewhat exacerbated by merge
ICSOFT 2023 - 18th International Conference on Software Technologies
324

commits, which were expressly avoided in our study.
Therefore, we only consider single-parent commits
and assign each commit purely to one of the three dis-
crete maintenance activities.
2.2 Formulation and Transposition
Given a labeled dataset of commits, e.g., (Levin and
Yehudai, 2017a; H
¨
onel, 2019), we gather observa-
tions of measurements for any of the three main-
tenance activities. This kind of dataset is applica-
ble to stateless classification problems, as we neither
have information about the transitions between states,
nor how long these took. Previously, it was demon-
strated that utilizing observations about the source
code changes can be leveraged for automatic com-
mit classification (Levin and Yehudai, 2017b) and that
adding additional attributes about the size of a commit
and the size of preceding commits can be integrated
into such models (H
¨
onel et al., 2020) to achieve state-
of-the-art classification rates, both cross-project and
for individual projects.
Traditionally, capturing transitions between states,
given continuous or discrete state spaces, requires
models that exhibit temporal dynamic behavior.
Some non-exhaustive examples of these kinds of
models are, e.g., Hidden (semi-) Markov Models
(HsMM) (Ramage, 2007; Helske and Helske, 2019),
Maximum Entropy Markov Models (MEMM) (Mc-
Callum et al., 2000), Conditional Random Fields
(CRF) (Sutton and McCallum, 2012), recurrent neu-
ral networks (RNN), or Long short-term models
(LSTM). HsMMs, MEMMs, and CRFs can be gen-
eralized into dependent mixture models. Such mod-
els also allow fitting transition models with covari-
ates, meaning that some posterior distribution may
depend on the current or previous state, or any other
desired property (Visser and Speekenbrink, 2010).
Some Bayesian models and HsMMs with finite and
discrete state spaces are quite similar in the sense that
both use segmented data to build a posterior distribu-
tion of some random variable. We discuss applicable
models later, Bayesian and Markovian in Section 3.2,
and Dependent Mixture Models in Section 3.3.
The data we gathered is likely too scarce to be fed
into LSTM models. And while a few implementations
exist for the other models, those are often limited in
some way; e.g., some only support 1st-order transi-
tions (often), so that we can only capture the immedi-
ate child of a commit, but not its grandchild. Another
frequent occurring limitation is the restriction to uni-
variate models, or, in case there is support for multi-
variate models, these cannot be of mixed type or are
restricted to a few specific probability distributions.
In other words, to capture the problem as we have de-
fined it, one would need a general-, multiple observa-
tion sequence-, nth-order multivariate (semi) depen-
dent mixture model. A semi-model allows for arbi-
trary sojourn-time distributions in each state, instead
of just fixed discrete-time transitions (O’Connell and
Højsgaard, 2011).
We propose transposing the problem by lever-
aging existing parent-child relations. Each instance
is horizontally concatenated with its predecessor (or
successor). This has several advantages. First, we
can generate plain datasets of arbitrary order. In each
order, we have the same kind of features available.
Second, we may fix the state of any instance at some
t ∈ T, and examine the distributions of the random
variables of any of its related instances in any arbi-
trary order. Third, this segmentation can be exploited
to assess the variable importance of some order. We
make use of this in our empirical evaluations. Last,
transposing the problem in this way makes it com-
patible with stateless and stateful classification mod-
els alike. This is especially useful for another class
of models, that are based on joint conditional proba-
bility distributions. With the suggested transposition,
the problem is now eligible for segmentation, and we
may estimate joint conditional probabilities over any
set of random variables, from any order, effectively
allowing us to encapsulate transitions between states
by capturing the posterior probability distributions of
some of the random variables. Using kernel density
estimation, we can estimate individual densities, i.e.,
it is not required to estimate one multidimensional
density. We introduce a number of these models more
formally in Section 3.4, as we achieve a new state of
the art with them.
2.3 Research Questions
With the problem transposed as in Section 2.2, we are
now capable of attempting to fit stateful and stateless
models similarly. Our research questions are, there-
fore, driven by the striving for answering the ques-
tion, of whether either type of model is suitable for
the problem.
RQ1: Using common state-of-the-art stateless mod-
els, such as Random forest or Gradient Boosting Ma-
chines, what is the best achievable classification rate?
Answering this question will not only set a base-
line for achievable classification rates but also allow
us to compare the effects, especially of joint density
models, where some densities are estimated over ear-
lier orders.
RQ2: We have plenty of features available, are uni-
variate HMMs with discrete state-space apt for clas-
Exploiting Relations, Sojourn-Times, and Joint Conditional Probabilities for Automated Commit Classification
325

sification?
We conjecture that no univariate HMM can ade-
quately represent a commit’s state. This question is
therefore mostly approached for the sake of justifica-
tion of more sophisticated Markov models.
RQ3: Do 1st- and 2nd-order dependent mixture mod-
els for multiple observation sequences perform better
than stateless classifiers?
We have implemented a classical 1st-order model,
that would likely be the most recommended for the
problem at hand. Since no 2nd-order implementation
was available, we provide our own and compare with
a focus on the different orders.
RQ4: Do 1st-, 2nd-, or 3rd-order joint conditional
density models perform better than stateless classi-
fiers, given that these models do not require ordered
sequences for inferencing?
Since any marginal density that is part of the joint
density can be estimated over the variables of any
available arbitrary order, it allows some degrees of
freedom with regard to which dimensions we segment
over a specific state.
3 BACKGROUND
In this section, we introduce Bayesian and Markovian
models (Section 3.2), before we show and general-
ize dependent mixture models in Section 3.3. Models
based on joint conditional densities are introduced in
Section 3.4.
3.1 Data Used
We have enriched a dataset (H
¨
onel, 2019) by first
adding parent-child relations and then by manu-
ally labeling series of consecutive (non-merge) com-
mits. Thirdly, we gathered additional attributes
about the relation and the sojourn-time for each
commit. The resulting dataset (H
¨
onel, 2023) con-
tains more than 50 independent variable-length se-
quences of consecutive commits and almost 300 com-
mits in total. Commits were taken from the four
Java applications elasticsearch, OrientDB, RxJava,
and Spring-FW. Sojourn-times appear to resemble a
log-normal distribution. The average sojourn time is
≈ 26.2 hours. The 10/25/50/75/95th percentiles are
≈ 0.7, 9, 34, 453, 5810 minutes.
3.2 Bayesian and Markovian Models
Bayesian networks and Markovian models share
some similarities, as both are directed acyclic graphs,
that compute the probability or likelihood of some
variable given some conditional probability, which is
usually estimated over a posterior probability distri-
bution. In Bayesian networks, these conditions are
usually derived from some probability tables, so that
the distribution of some variable depends on another
variable assuming a specific value. Given the classi-
cal Rain – Grass wet – Sprinkler example, the proba-
bility of the grass being wet is conditional on whether
it rained, the sprinkler ran, or both. The process of
imposing these conditions, in order to derive a condi-
tional probability density or mass, is called segment-
ing. Furthermore, we facilitate this mechanic to seg-
ment one or more variables at the same time. This is
used when segmenting over more than one order in
the dataset of the transposed problem.
Markov models that make some observations at
any discrete point in time, without being able to ob-
serve the actual state, are called latent or hidden. Sim-
ilar to Bayesian networks, however, we can exploit
this in 1st-order HMMs by building densities that are
conditional on the current transition, i.e., conditional
of having come from state t − 1, and now being in
state t. This concept can be extended to any arbi-
trary order. Building and exploiting conditional den-
sities this way, however, is more common in depen-
dent mixture models. In this paper, classical 1st-order
HMMs were only used to address RQ1.
3.3 Dependent Mixture Models
Dependent mixture models are by themselves a gen-
eralization of standard Markov models, latent/hidden
Markov models, and latent class and finite mixture
distribution models. Like traditional HMMs, depen-
dent mixture models make use of a discrete and finite
state space, initial probabilities for all these states,
transition probabilities between them, and emission
probabilities. The latter, however, are generalized and
represented as a vector of density functions for each
feature, thus effectively making these models multi-
variate. In our implementation, we estimate the em-
pirical probability mass for discrete features, and the
empirical probability density or cumulative probabil-
ity, alternatively, for continuous features.
We use the notions and definitions of (Visser and
Speekenbrink, 2010) to define and implement 1st- and
2nd-order models. However, we waive using addi-
tional symbols for segmenting random variables using
some covariates. The data is considered to have the
form O
1:T
= (O
1
1
, .. . ,O
m
1
, . . . ,O
1
T
, .. . ,O
m
T
), for an
ordered sequence of m-variate observations. We usu-
ally do not denote m to indicate each random variable
and instead just use O
t
or O
t
as a shorthand notation.
1. S
t
is an element of S = {1, . .. ,n}, the discrete
ICSOFT 2023 - 18th International Conference on Software Technologies
326

and finite state space,
2. π
i
= P(S
1
= i), a vector of initial state probabili-
ties, giving the probability for starting in state i,
3. A
ij
= P(S
t+1
= j| S
t
= i), a two-dimensional
matrix providing transition probabilities for going
from S
t
= i to S
t+1
= j,
4. b
S
t
, a vector of conditional density functions for
state S
t
, one for each random variable; b
j
(m) =
P(O
m
t
|S
t
= j).
The first-order dependent mixture model, which
assigns a likelihood of being in state j for observation
O
t
, is defined in (2). This is a recursive definition and
constitutes the Forward algorithm, that requires the
likelihood of the preceding state. The initial observa-
tion is estimated using (3).
φ
1
t
( j) =
N
∑
i=1
φ
1
t−1
(i)A
i j
b
j
(O
t
)
×
N
∑
i=1
φ
1
t−1
(i)
!
−1
,
(2)
φ
1
1
( j) = π
j
b
j
(O
1
). (3)
Equivalently, we define the 2nd-order dependent
mixture model as (4) with an estimator for the second
observation, that is the same as the generic estimator
for 1st-order models, i.e., (5) is equal to (2). Beyond
that, the 2nd-order model uses the same φ
1
1
( j) for es-
timating the likelihood of the first observation. This
is true for any n-th order dependent mixture model.
Generally, any n-th order model uses the estimator
φ
t−1
t
for observation O
t−1
, ∀t < min(n, T − 1).
φ
2
t
( j) =
∑
N
h=1
∑
N
i=1
φ
2
t−2
(h)φ
2
t−1
(i)A
hi j
b
j
(O
t
)
∑
N
h=1
∑
N
i=1
φ
2
t−2
φ
2
t−1
(i)
,
(4)
φ
2
2
( j) = φ
1
t
( j). (5)
We have implemented and evaluated 1st- and 2nd-
order dependent mixture models. Additionally, we
add the following generalization for arbitrary-order
dependent mixture models (6). This model general-
izes by having a vector of previous states, i, and the
tensor A
i, j
, that has the dimensions card(i)+ 1. That
tensor can be thought of as folding n = card(i) ten-
sors, each of which sums to 1. The initial n-th order
model, for t > 1, is chosen by φ
n
t
= Θ
t,n
(7).
φ
n
t
( j) =
∑
N
i∈i
[θ
n
(i)A
i, j
b
j
(O
t
)]
∑
N
i∈i
[θ
n
(i)]
,∀t > 1, (6)
Θ
t,n
( j) =
(
φ
1
1
( j), ∀t < 0,
φ
min(t−1,n)
t
( j), otherwise.
(7)
Table 1: Comparison of conditional density functions b
j
,
c
j
, d
j
, e
i j
, and e
hi j
.
Function Order S
t
S
t−1
S
t−2
X
t
X
t−1
X
t−2
b
j
(O
t
) - ✓ - - ✓ - -
c
1
j
(O
t
) 1 - ✓ - ✓ - -
c
2
j
(O
t
) 2 - - ✓ ✓ - -
d
1
j
(O
t−1
) 1 ✓ - - - ✓ -
d
2
j
(O
t−2
) 2 ✓ - - - - ✓
e
1
i j
(O
t
) 1 ✓ ✓ - ✓ - -
e
2
hi j
(O
t
) 2 ✓ ✓ ✓ ✓ - -
3.4 Joint Conditional Probability
Models
In this section, we introduce models based on joint
conditional densities. We distinguish two sub-types
of models, (i) models that require input from parent
observations, and (ii) those that do not. None of these
models requires transition probabilities, as those are
encapsulated by the joint densities. Models of the first
sub-type are therefore stateful, and models of the sec-
ond sub-type are not, and hence only require the cur-
rent observation as input. We implement and evaluate
one model of the first sub-type, and suggest another
one. For the second sub-type, we suggest, implement,
and evaluate two models.
An overview of the conditional density functions
is found in Table 1. In this table, X is the set of all
random variables X associated with each observation.
X
t
refers to the set of random variables belonging to
the t-th predecessor of O
t
. Hence, any S
t
designates
which instances were selected before densities were
estimated. As an example, the function e
1
i j
(O
t
) se-
lects those instances, that were of type j (S
t
= j) and
had a parent of type i (S
t−1
= i). It then estimates
densities over X
t
, which is the set of random variables
associated with O
t
.
We suggest four models A through D, and pro-
vide implementations for the first three models. All
of the models use b
j
(O
t
), as it expresses a likelihood
for O
t
= j (is O
t
a “ j”?).
Model A uses d
n
j
(O
t−n
) as estimator. Addition-
ally, to inquiring about a likelihood for the current
observation, models using d
n
j
test for the likelihood
of the entire transition, as they estimate densities
over the predecessors while having had previously
segmented over a specific j. Informally speaking,
these models ask for whether the parent O
t−1
as
given is one that usually precedes the kind j currently
presumed to be O
t
. Model A in 1st- and 2nd-order is
given by Equations (8) and (9), respectively.
Exploiting Relations, Sojourn-Times, and Joint Conditional Probabilities for Automated Commit Classification
327

φ
1
t
( j) = d
1
j
(O
t−1
) b
j
(O
t
), (8)
φ
2
t
( j) = d
2
j
(O
t−2
) d
1
j
(O
t−1
) b
j
(O
t
). (9)
Model B uses c
n
j
(O
t
). This model is peculiar as it
neither requires to use an extra estimator for the first
states nor does it require previous observations for in-
ferencing. Models using c
n
j
had previously segmented
on some predecessor of j, while estimating densities
over the observations at point S
t
= j. The transition
test in these functions can more informally be under-
stood as asking, how likely O
t
is, having come from
some j. The underlying conjecture is that variables
are differently distributed if they had a specific parent
and that densities over these distributions will yield
a somewhat different likelihood if this O
t
is a typical
successor to the current j in question. In other words,
is it plausible that this O
t
usually follows a j? The
1st- and 2nd-order models for B are given by Equa-
tions (10) and (11), respectively.
φ
1
t
( j) =
N
∑
i=1
c
1
i
(O
t
) b
j
(O
t
)
× (N × b
j
(O
t
))
−1
,
(10)
φ
2
t
( j) =
N
∑
i=1
h
c
2
i
(O
t
) c
1
i
(O
t
) b
j
(O
t
)
i
×
N × b
j
(O
t
)
−1
.
(11)
Model C uses e
1
i
(O
t
) (where i is a vector of pre-
vious states). Similar to model B, this model does not
require extra estimators for the first states, and it infer-
ences using only the current observation. It is some-
what similar to B, but we are asking about O
t
= j,
given a specific set of parents i. This is the transition
test for this model. Again, the underlying conjecture
is that O
t
= j is more likely if we have segmented over
predecessors that usually precede that j. The model
in 1st- and 2nd-order is specified in (12) and (13).
φ
1
t
( j) =
N
∑
i=1
[e
i j
(O
t
)], (12)
φ
2
t
( j) =
N
∑
h=1
N
∑
i=1
e
hi j
(O
t
)
. (13)
As can be seen in Table 1, we can almost arbi-
trarily define joint conditional density functions that
estimate the likelihood of the current or previous ob-
servations, while encapsulating all transition proba-
bilities, thus lifting the need for transition tensors en-
tirely. Additionally, some models do not require ini-
tial state probabilities either and become effectively
stateless.
Model D is only formally defined but was not
evaluated in any way. It is a hybrid of a dependent
mixture- and a joint conditional density model. It is
similar to model B, but we are factoring in the likeli-
hood of any potential parent state. Since this is max-
imized, it may affect the prediction. The 1st order of
that model is shown in (14).
φ
1
t
( j) =
∑
N
i=1
φ
t−1
(i) c
1
i
(O
t
) b
j
(O
t
)
∑
N
i=1
φ
t−1
(i) c
1
i
(O
t
)
. (14)
3.5 Other Models
Other models that are at least partially suitable to the
described problem exist. However, none of these was
fulfilling all the criteria or there was simply no imple-
mentation available that could be used off the shelf,
and an own implementation was not considered fea-
sible. The models we have described until now are
all implemented for the R statistical software (R Core
Team, 2019) and were made freely available. They
are compatible with generic data that fits the same
problem as we have tried to solve here so that we
are certain that other researchers and practitioners can
reuse them.
During early exploration, we examined Condi-
tional random fields (Sutton and McCallum, 2012)
closer, as they seemed to be the closest candidate.
However, those models are undirected and effectively
not using the transition properties that we especially
obtained.
4 METHOD
In the previous section, we outlined a number of con-
crete models suitable to the transposed problem as
formulated earlier. Identifying appropriate models
was an initial step in approaching this study. Models
based on joint conditional density were selected and
assembled only after carefully evaluating their theo-
retical capabilities to encompass the problem.
Another issue was obtaining a suitable dataset,
that has a sufficient amount of instances and reli-
able attributes, and also comes with relational prop-
erties. There was no such dataset for commits. We
previously released a tool to analyze Git reposito-
ries, which we extended to also extract additional re-
lational properties (H
¨
onel, 2022). We then used an
existing commit dataset (Levin and Yehudai, 2017a;
H
¨
onel, 2019) that had labels across more than 1,150
commits, which were unfortunately not labeled con-
secutively. It was necessary to reverse-engineer an
extensive ruleset for how to label commits. When
we were done with the rules, we used them to label
a few hundred of the other, already labeled commits.
ICSOFT 2023 - 18th International Conference on Software Technologies
328

We achieved an almost perfect agreement. Only after
that, we labeled additional adjacent commits. The ex-
tended ruleset, dataset, and all software and tools are
published (H
¨
onel, 2023). The final dataset has about
50 features per observation, and we use about half of
them during our empirical evaluation.
When concatenating datasets horizontally, based
on the parent-child relationships in the data (cf. 1), the
width and amount of features increase quickly. While
for some models this is not problematic, it is for oth-
ers. We, therefore, apply a Recursive Feature Elim-
ination (RFE) (Guyon et al., 2002) before we train
some of the models. As an outer resampling method,
at least three times repeated five- or ten-fold cross-
validation is used, with a constant holdout of 20%
across all tests. Cross-validation behaves as a regular-
izer when fitting models, and is an effective tool for
preventing the over-fitting of models. Over-fitting is
probably the largest threat to validity for some mod-
els.
5 EMPIRICAL EVALUATION
In this section, we present some results of the eval-
uation of the dependent mixture- and joint condi-
tional density models. We are checking classifica-
tion accuracy and Cohen’s Kappa (Cohen, 1960, cf.
Eq. 15). Accuracy and Kappa are the two metrics
found in most of the related work, and they make for
a great team since neither metric has enough explana-
tory power on its own. If both metrics are reported
at the same time, they can mitigate shortcomings of
other metrics, such as the F1-score.
Kappa =
Accuracy
total
− Accuracy
random
1 − Accuracy
random
(15)
As stated in Section 3.4, all of our models are divided
into two sub-types, (i) models that require parent ob-
servations as input, and those that do not (ii). For an
overview, we list models of either sub-type:
(i) Dependent Mixture models, Joint conditional
density model A,
(ii) Joint conditional density models B,C; 3rd-party
models (the models used are: Random for-
est (Liaw and Wiener, 2002; Wright and Ziegler,
2017; Breiman, 2001), Gradient Boosting Ma-
chines (Greenwell et al., 2019), Na
¨
ıve Bayes (Ma-
jka, 2019), and C5.0 (Kuhn and Quinlan, 2020)).
It is worth noting that all training and inferencing
were done cross-project, as the data we have spans
four Java projects. We have previously shown that
fitting a model to an individual project can result in
Table 2: Results of evaluating the stateful models.
Model Order Top Acc. Top Kappa ∅ Acc. ∅ Kappa
DepMix 1 0.75 0.00 0.44 −0.02
DepMix 2 0.66 0.00 0.53 −0.01
JCD: A 1 0.35 −0.01 0.23 −0.05
JCD: A 2 0.40 0.06 0.27 −0.04
higher accuracy, but here, it would result in the data
becoming too scarce. For stateless models, we will
do a classic cross-validation. For stateful models we
require one or more lists of consecutive observations,
i.e., we cannot just randomly sample some fraction
from the data and then inference. Training on the
other hand does not require sequences, as data is se-
lected by segmentation. To alleviate this problem, we
do the following:
1. Deterministically shuffle the available sequences
of observations in each resample.
2. Take sequences of commits out of the available
data until the ratio between commits left in the
data and commits present on any chain is 0.8 or
less.
3. Each sequence is then predicted separately, and
all predictions and ground truth are concatenated.
Then, a confusion matrix is created, yielding the
metrics’ accuracy and Kappa.
4. Repeat at least 15 times and shuffle the list of
available sequences in every pass. Finally, aver-
age the results.
5.1 Stateful Models
Almost always is the achieved Kappa for these mod-
els zero, or even negative, which means the agreement
is worse than it would be by chance. By inspecting
some of the results it becomes clear, that these mod-
els often predict long sequences without alternating
between states much or at all. That explains also the
high accuracy. Given that most of the commits are
of perfective nature, just predicting that type without
changing to another type will deliver exactly the re-
sults as we have gotten them. It seems as if the de-
pendent mixture models get stuck in absorbing states
as the univariate HMMs did. The results are to be
found in Table 2.
5.2 Stateless Models
All 3rd-party stateless models were given data that
was previously reduced by RFE to the most signifi-
cant predictors. The stateless joint conditional density
models, however, were evaluated once for all features,
and once over the reduced set. Recall the definition
Exploiting Relations, Sojourn-Times, and Joint Conditional Probabilities for Automated Commit Classification
329

Table 3: Results of evaluating the stateless models.
Model Order Top Acc. Top Kappa ∅ Acc. ∅ Kappa
ZeroR
n
/
a
0.547 0.000 0.515 0.000
C5.0 0.596 0.341 0.592 0.309
GBM 0.619 0.369 0.599 0.321
Naive B. 0.384 0.171 0.358 0.144
Ranger 0.650 0.421 0.622 0.341
Random F. 0.641 0.409 0.618 0.330
JCD: B 1 0.423 0.199 0.255 0.010
JCD: B 2 0.461 0.266 0.251 0.000
JCD: B 3 0.432 0.237 0.248 0.000
JCD: C 1 0.757 0.612 0.467 0.182
JCD: C 2 0.717 0.519 0.450 0.122
of these models from Section 3.4. It becomes appar-
ent, that the functions build sums and not products.
If it were a product, we should have probably intro-
duced Laplacian/Lidstone smoothing (Manning et al.,
2008), to avoid zero- or near-zero factors. However,
since sums are built, additional features, even if they
result in such low likelihoods, do not spoil the result.
Indeed, the joint conditional density models using all
available variables can outperform the best 3rd-party
classifier (Ranger) by double digits, with a boost of
10.7% in accuracy and an improvement of 0.19 for
Kappa, which improves it from moderate to substan-
tial (Landis and Koch, 1977). These models thereby
also outperform the state-of-the-art models that use
the same feature sets. All results are to be found in
Table 3.
6 SUMMARY AND
CONCLUSIONS
In this paper, we have presented the problem of com-
mit classification, using relational properties. These
were not considered previously. Classical attempts
that come to mind for solving the presented problem
proved not to be of value so appropriate models were
suggested.
Our answer to RQ1 is, that current models, such
as Random forest or Gradient Boosting Machines, de-
liver a similar performance on our data. No model can
seem to surpass a certain threshold. All of the 3rd-
party models are about 5–10% better than the baseline
(ZeroR).
While not evaluated in detail here, the answer to
RQ2 is, that not only can univariate HMMs not be
used for automatic classification of changes, but those
kinds of models are also prone to absorbing states.
If the data is skewed, resulting in some states occur-
ring more frequently than others, then this will af-
fect the initial state probabilities, the transition prob-
abilities, and the emission probabilities in a way that
these models cannot effectively leave the state they
are stuck in anymore for the predictive scenarios we
described here.
RQ3 can only be answered negatively. It seems
that dependent mixture models, regardless of their or-
der, are also subject to absorbing states. Since we get
consistently almost zero for the Kappa, the accuracy
reported by these models is worthless.
However, for RQ4, we can report that some of our
joint conditional density models can outperform the
best 3rd-party models by double digits. We can see
an improvement in Kappa by almost an entire class.
It appears that the joint conditional density models
capture developer behavior well. Our intuition behind
these models was that maintenance activities in typi-
cal software projects are not carried out at random but
rather follow a logical sequence. Considering a single
direct preceding commit, i.e., its features and associ-
ated maintenance activity, can be exploited for esti-
mating precise conditional densities. To some degree,
this confirms that developer behavior is deterministic.
6.1 Limitations
While we found sufficient corroboration to confirm
our hypothesis, the external validity of the trained
models cannot be guaranteed. While we used to three
times repeated five- or ten-fold cross-validation in or-
der to obtain the results, their robustness is limited.
7 REPRODUCIBILITY
All of our work was done with reproducibility in
mind. All tools, data, experiments, implemented
methods and reverse-engineered classification rules
can be obtained from (H
¨
onel, 2023).
ACKNOWLEDGMENTS
We would like to thank the anonymous reviewers for
their valuable feedback that helped us to improve our
work.
REFERENCES
Bell, R. M., Ostrand, T. J., and Weyuker, E. J. (2011). Does
measuring code change improve fault prediction? In
Proceedings of the 7th International Conference on
Predictive Models in Software Engineering. ACM.
Breiman, L. (2001). Random forests. Machine Learning,
45(1):5–32.
ICSOFT 2023 - 18th International Conference on Software Technologies
330

Cohen, J. (1960). A coefficient of agreement for nominal
scales. Educational and Psychological Measurement,
20(1):37–46.
Eick, S. G., Graves, T. L., Karr, A. F., Marron, J. S., and
Mockus, A. (2001). Does code decay? assessing the
evidence from change management data. IEEE Trans-
actions on Software Engineering, 27(1):1–12.
Fluri, B., W
¨
ursch, M., Pinzger, M., and Gall, H. C. (2007).
Change distilling: Tree differencing for fine-grained
source code change extraction. IEEE Transactions
Software Engineering, 33(11):725–743.
Fu, Y., Yan, M., Zhang, X., Xu, L., Yang, D., and Kymer,
J. D. (2015). Automated classification of software
change messages by semi-supervised latent dirich-
let allocation. Information and Software Technology,
57:369–377.
Greenwell, B., Boehmke, B., Cunningham, J., and Develop-
ers, G. (2019). gbm: Generalized Boosted Regression
Models. R package version 2.1.5.
Guyon, I., Weston, J., Barnhill, S., and Vapnik, V.
(2002). Gene Selection for Cancer Classification us-
ing Support Vector Machines. Machine Learning,
46(1/3):389–422.
Helske, S. and Helske, J. (2019). Mixture hidden markov
models for sequence data: The seqHMM package in
R. Journal of Statistical Software, 88(3):1–32.
Hindle, A., Germ
´
an, D. M., Godfrey, M. W., and Holt, R. C.
(2009). Automatic classication of large changes into
maintenance categories. In The 17th IEEE Interna-
tional Conference on Program Comprehension, pages
30–39. IEEE Computer Society.
H
¨
onel, S., Ericsson, M., L
¨
owe, W., and Wingkvist, A.
(2020). Using source code density to improve the ac-
curacy of automatic commit classification into main-
tenance activities. Journal of Systems and Software,
168:110673.
H
¨
onel, S. (2019). 359,569 commits with source code den-
sity; 1,149 commits of which have software mainte-
nance activity labels (adaptive, corrective, perfective).
H
¨
onel, S. (2019–2022). Git Density 2022.10: Analyze git
repositories to extract the Source Code Density and
other Commit Properties.
H
¨
onel, S. (2023). GitHub Repository: Datasets, Experi-
mental Setups, and Code for Exploiting Relations Be-
tween Commits. DOI: 10.5281/zenodo.7715007.
Kirinuki, H., Higo, Y., Hotta, K., and Kusumoto, S. (2014).
Hey! are you committing tangled changes? In
22nd International Conference on Program Compre-
hension, pages 262–265. ACM.
Kuhn, M. and Quinlan, R. (2020). C50: C5.0 Decision
Trees and Rule-Based Models. R package version
0.1.3.
Landis, J. R. and Koch, G. G. (1977). An application of
hierarchical kappa-type statistics in the assessment of
majority agreement among multiple observers. Bio-
metrics, 33(2):363–374. PMID:884196.
Levin, S. and Yehudai, A. (2016). Using temporal and se-
mantic developer-level information to predict mainte-
nance activity profiles. In 2016 IEEE International
Conference on Software Maintenance and Evolution.
Levin, S. and Yehudai, A. (2017a). 1151 commits with soft-
ware maintenance activity labels (corrective, perfec-
tive, adaptive).
Levin, S. and Yehudai, A. (2017b). Boosting automatic
commit classification into maintenance activities by
utilizing source code changes. In Turhan, B., Bowes,
D., and Shihab, E., editors, Proceedings of the 13th
International Conference on Predictive Models and
Data Analytics in Software Engineering.
Liaw, A. and Wiener, M. (2002). Classification and regres-
sion by randomforest. R News, 2(3):18–22.
Lin, I. and Gustafson, D. A. (1988). Classifying software
maintenance. In Proceedings of the Conference on
Software Maintenance, pages 241–247. IEEE.
Majka, M. (2019). naivebayes: High Performance Imple-
mentation of the Naive Bayes Algorithm in R. R pack-
age version 0.9.7.
Manning, C. D., Raghavan, P., and Sch
¨
utze, H. (2008). In-
troduction to information retrieval. Cambridge Uni-
versity Press.
McCallum, A., Freitag, D., and Pereira, F. C. N. (2000).
Maximum entropy markov models for information ex-
traction and segmentation. In Langley, P., editor, Pro-
ceedings of the Seventeenth International Conference
on Machine Learning, pages 591–598.
Mockus, A. and Votta, L. G. (2000). Identifying reasons for
software changes using historic databases. In 2000
International Conference on Software Maintenance,
pages 120–130. IEEE Computer Society.
O’Connell, J. and Højsgaard, S. (2011). Hidden Semi
Markov Models for Multiple Observation Sequences:
The mhsmm Package for R. Journal of Statistical
Software, 39(4):1–22.
Purushothaman, R. and Perry, D. E. (2005). Toward
understanding the rhetoric of small source code
changes. IEEE Transactions on Software Engineer-
ing, 31(6):511–526.
R Core Team (2019). R: A Language and Environment for
Statistical Computing. R Foundation for Statistical
Computing, Vienna, Austria.
Ramage, D. (2007). Hidden markov models fundamentals.
CS229 Section Notes.
Shivaji, S., Jr., E. J. W., Akella, R., and Kim, S. (2013).
Reducing features to improve code change-based bug
prediction. IEEE Transactions on Software Engineer-
ing, 39(4):552–569.
Sutton, C. and McCallum, A. (2012). An introduction to
conditional random fields. Foundations and Trends in
Machine Learning, 4(4):267–373.
Swanson, E. B. (1976). The dimensions of maintenance. In
Yeh, R. T. and Ramamoorthy, C. V., editors, Proceed-
ings of the 2nd International Conference on Software
Engineering, pages 492–497.
Visser, I. and Speekenbrink, M. (2010). depmixs4: an r
package for hidden markov models. Journal of Statis-
tical Software, 36(7):1–21.
Wright, M. N. and Ziegler, A. (2017). ranger: A fast im-
plementation of random forests for high dimensional
data in C++ and R. Journal of Statistical Software,
77(1):1–17.
Exploiting Relations, Sojourn-Times, and Joint Conditional Probabilities for Automated Commit Classification
331
