
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems
David Halasz
a
and Barbora Buhnova
b
Faculty of Informatics, Masaryk University, Brno, Czech Republic
Keywords:
Autonomous Collaborative Ecosystems, Adaptive Safety, Software Architecture, Trust, Security, Autonomous
Vehicles, Smart Agents, Digital Twins.
Abstract:
The dynamic collaboration among hyper-connected Autonomous Systems promotes their evolution towards
Autonomous Ecosystems. In order to maintain the safety of such structures, it is essential to ensure that there
is a certain level of understanding of the present and future behavior of individual systems in these ecosystems.
Adaptive Safety is a promising direction to control access to features between cooperating systems. However,
it requires information about its collaborators within the environment. Digital Twins could be used to predict
possible future behavior of a system. This paper introduces a conceptual framework for Adaptive Safety that
is being triggered based on the trust score computed from the predictive simulation of Digital Twins, which we
suggest to use in Autonomous Ecosystems to load and safely execute third-party Smart Agents. By quantifying
trust towards the agent and combining it with a decision tree, we leverage this as a deciding factor to conceal
or expose certain features among collaborating systems.
1 INTRODUCTION
Traditionally Autonomous Cyber-Physical Systems
leverage computer networking to share information
among each other. This communication is in-
evitably forming a dynamic Autonomous Ecosystem
of heterogeneous member systems (Cioroaica et al.,
2019a). As the complexity of these Systems of Sys-
tems is growing, more sophisticated ways of infor-
mation sharing are required for coordination, to the
degree where an execution of a Smart Agent received
from the central authority or other collaborators might
be needed for effective synchronization and collab-
oration (Capilla et al., 2021). However, executing
third-party software in any environment raises safety
concerns.
Although there are technologies that allow iso-
lated execution of untrusted software (Sahoo et al.,
2010; Greamo and Ghosh, 2011), a full isolation
would render the benefits of these Smart Agent in-
significant over other technologies. Already existing
pass-through solutions often rely on human interven-
tion and static configuration, which is not applicable
in a constantly changing autonomous environment.
To overcome this issue, a more sophisticated archi-
tecture is necessary that is capable of an adaptive per-
a
https://orcid.org/0000-0002-0393-7857
b
https://orcid.org/0000-0003-4205-101X
mission handling of pass-through configurations. In
other words, the access of a third-party Smart Agent
to the various platform services provided by an Au-
tonomous System should be dynamically changing
based on the actual context.
1.1 Motivating Scenarios
In any city around the world, local authorities might
state rules and regulations for vehicles. These local
rules and regulations are usually displayed in horizon-
tal or vertical road signs and it is up to the drivers
to respect them. Although there are solutions for
Autonomous Vehicles to recognize and respect these
signs, there might be more sophisticated solutions for
enforcement. Using a medium intended for humans
(road signs) to communicate with machines might be
an unnecessary extra step. Furthermore, there might
be more complicated dynamic rules that are specific
to Autonomous Vehicles that can be only represented
in executable machine code. To support this, the pos-
sibility to safely load and execute third-party Smart
Agent into an existing Autonomous System would be
necessary.
Autonomous Driving in a Smart City. Consider
a scenario of an Autonomous Vehicle entering the
premises of a city where speed limits are dynamically
Halasz, D. and Buhnova, B.
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems.
DOI: 10.5220/0012086600003538
In Proceedings of the 18th International Conference on Software Technologies (ICSOFT 2023), pages 393-403
ISBN: 978-989-758-665-1; ISSN: 2184-2833
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
393

enforced based on the location, time of the day and
current density of traffic. In order to reduce the traffic
on certain spots, there are also zones with the mini-
mum speed that are intended to empty critical inter-
sections faster. Let’s imagine that the city requires all
Autonomous Vehicles joining its ecosystem to load
and execute a Smart Agent implementing these dy-
namic rules of traffic. Even though the Smart Agent
has been certified by regulatory organizations, exe-
cuting it in a privileged mode where it has unlimited
access to all the features of the vehicle carries some
risks. A simple binary decision about providing ac-
cess is not sufficient to ensure that both the vehicle
and the ecosystem maintain their safety requirements.
Vehicle Platooning. A different scenario might
happen on a highway, where vehicles can move in pla-
toons(Axelsson, 2016). These ad-hoc groups of vehi-
cles moving closely together with a matching speed
allow them to utilize aerodynamic properties to re-
duce their energy consumption. In a centralized sce-
nario, the Smart Agent may be created in advance by
the highway authorities and distributed using Road
Side Units. However, a more dynamic and decentral-
ized approach is also possible when a vehicle already
contains an agent for platooning and shares it with its
neighbors. The advantage of this scenario is a lower
reliance on a Road Side Unit and the fact that the life
cycle of the Smart Agent in the ecosystem can be con-
trolled by the actual platoon. On the other hand, a
vehicle with malicious intent could easily disrupt the
whole ecosystem and cause damage to other mem-
bers.
1.2 Contribution of the Paper
In this paper, we envision a conceptual framework for
trust-based adaptive safety assurance in autonomous
ecosystems, which is tailored (though not limited)
to the motivating context of Autonomous Vehicles.
The proposed framework is based on the vision that
the potentially untrusted Smart Agents (discussed in
the scenarios) should be executed in an environment
where safety is ensured based on trust. By quantifying
the trust towards an agent, the framework suggests to
adjust the agent’s reach to various features of the Au-
tonomous System (e.g., vehicle).
As the trust score may vary over time, the frame-
work supports continuous real-time reevaluation of
the trust quantification and adaptation to it. The key
component of the proposed framework is thus the
trust quantification process, which is fed from two
sources: (1) reputation engine and (2) predictive sim-
ulation of the Smart Agent conducted on a ”virtual
copy” of the agent, i.e. a Digital Twin (Rosen et al.,
2015), intended for describing the behavior of the
agent in a simulated environment. The framework can
then use the Digital Twin to simulate possible future
scenarios happening to the autonomous vehicle, and
to perform runtime compliance checking (Iqbal and
Buhnova, 2022) of the Digital Twin with the actual
real-world behaviour of the Smart Agent, to assess the
accuracy of the Digital Twin as well as the trustwor-
thiness of the Smart Agent.
1.3 Paper Structure
The structure of the paper is as follows. After the dis-
cussion of the background in terms of trust manage-
ment and safety assurance in Section 2, we discuss
the related work in Section 3, highlighting the con-
cepts of safety assurance in autonomous systems and
trust management in software systems in general. The
envisioned conceptual framework is presented in Sec-
tion 4 and later evaluated on a demonstration scenario
in Section 5. The paper concludes with discussion in
Section 6 and conclusion in Section 7.
2 BACKGROUND
To lay down the foundations for trust-based adaptive
safety in autonomous ecosystems, we first explain the
essentials of autonomous ecosystems and define the
key concepts in trust management, which are mainly
the representation of trust and trust-formation com-
ponents. Then, we look into the basics of safety as-
surance and its understanding in the context of au-
tonomous ecosystems.
2.1 Autonomous Ecosystems
With the expanding scope of today’s system, charac-
terized by hyper-connectivity and dynamic runtime
reconfiguration, adapting system behaviour to effec-
tively collaborate with its surroundings, we are wit-
nessing the transitioning from standalone systems
and systems-of-systems to dynamic software ecosys-
tems (Capilla et al., 2021). Within dynamic software
ecosystems, the individual systems and other enti-
ties (including the Smart Agents inside these systems)
are engaged in mutual interactions, which might be
driven by collaborative, competitive or even mali-
cious goals (Cioroaica et al., 2021). This stimulates
the need of the individual collaborators to be able to
distinguish among the entities they can and cannot
trust, forming social relationships to support their in-
terests and needs (Sagar et al., 2022).
ICSOFT 2023 - 18th International Conference on Software Technologies
394

Figure 1: Trust Management Components (Buhnova, 2023).
2.2 Trust Management
Every branch of science has its own definition of
trust (Cho et al., 2015). The most applicable ones that
match our understanding are coming from human-
related branches (Rotter, 1980; Lahno, 2001; Mayer
et al., 1995) that can be projected to the context of
autonomous systems via understanding trust as ”the
attitude or belief of an agent (trustor) to achieve
a specific goal in interaction with another agent
(trustee) under uncertainty and vulnerability” (Buh-
nova, 2023).
2.3 Representation of Trust
Finding the right representation for the depth of trust
might be contextual, with each domain having its own
preference. The majority of the research focuses on a
binary understanding (Cho et al., 2015), i.e. to trust
or not to trust. However, the large distance between
these two extremes renders this approach risky in case
of misclassification. As we argued in our previous
work (Halasz, 2022; Halasz and Buhnova, 2022), by
interpreting trust as a quantifiable value, e.g. a per-
centage, we can smoothen out the extremes by statis-
tically reducing the distance between a wrongly as-
sessed and the actual trust. Without specifying its ac-
tual representation in detail, we refer to this represen-
tation as the Trust Score.
2.4 Trust Formation Components
The processes of trust formation by a trustor towards
a trustee are typically fed from two main sources
(see Figure 1), the direct and indirect trust (Buhnova,
2023). Direct Trust represents an individual judg-
ment by the trustor based on its direct interaction
with the trustee. In this sense, it is based on local
and context-specific experience and direct observa-
tion by the trustor. Indirect Trust is, on the other hand,
learned from the environment, in terms of the repu-
tation of the trustee. Specifically, it can come from
an authority managing the reputation of the trustee
within the ecosystem, or be formed by propagated
opinions and recommendations of trusted peers of the
trustor.
2.5 Safety in Autonomous Ecosystems
Similarly to trust, safety can be understood in a vari-
ety of ways depending on its context. According to
our analysis, the following definitions are the most
appropriate for our context: ”the ability of a dis-
tributed application and its parts to continue oper-
ating in a safe manner during and after a transfor-
mation” (McKinley et al., 2004) and the ”avoidance
of hazards to the physical environment” (Banerjee
et al., 2012). Safety in the domain of Autonomous
Ecosystems is significantly broader than safety in Au-
tonomous Systems (Ramos et al., 2019). The dy-
namic collaboration of member systems creates a
larger collaborative entity that has a different inter-
pretation of safety that might even violate safety re-
quirements for some of its members in the interest of
the ecosystem as a whole.
2.6 Safety Assurance
Ensuring safety in reasonably complex systems can
be mainly covered during design-time considerations
with a thorough testing, compliance checking and cer-
tification process before it is ready for the end-users.
Even though these systems contain run-time dynamic
solutions for safety assurance, their flexibility is lim-
ited and can not always adapt to uncertain situations.
Therefore, when working with more complex systems
of ecosystems, a different approach is necessary. In-
stead of a static design-time certification, a dynamic
run-time certification is necessary to ensure that a sys-
tem behaves safely even in previously not covered sit-
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems
395

uations (Kusnirakova and Buhnova, 2023; Bakirtzis
et al., 2022).
3 RELATED WORK
While research work on safety in the wide context of
autonomous ecosystems is still in its inception (see
Section 3.1), substantial attention is being targeted
towards the safety of autonomous vehicles (see Sec-
tion 3.2). Besides, related work can also be identi-
fied in the direction of isolated execution of untrusted
software, used to ensure safety (see Section 3.3), and
coordination of agents in autonomous ecosystems for
safe collaboration (see Section 3.4).
3.1 Safety in Autonomous Ecosystems
There has been interesting relevant research done to
ensure safety and security in the particular areas of
autonomous systems. The biggest two gaps identified
in this body of work are uncertainties in modeling and
accomplishing higher goals through cooperation and
collaboration (Jahan et al., 2019). The concept of self-
adaptation offers a solution of dealing with scenarios
that are uncertain and not known during design time.
Technologies like MAPE-K (Arcaini et al., 2015) or
aCLFs (Taylor and Ames, 2020) can be utilized to
achieve security and safety via self-adaptation. Un-
fortunately, these methods do not always scale well
as solutions to the magnitude of Autonomus Ecosys-
tems, e.g. there is no straightforward solution to dis-
tribute a MAPE-K feedback loop among members of
an ecosystem.
3.2 Autonomous Vehicles Safety
Unquestionably, the domain of Autonomous Vehicles
has been the focus of study in the field of Autonomous
Systems in recent years. Research in the field of
safety in this area is largely concerned with commu-
nication security, emergency response plans in case
of failure or attack (Cui et al., 2019; Bouchelaghem
et al., 2020), dynamic construction of vehicle con-
voys, i.e. platooning (Axelsson, 2016), and collision
avoidance techniques (Li et al., 2021). Although all
these research topics are in the domain of safety, they
mainly focus on individual vehicles and only very few
of them have a broader focus that can be scaled up to
our vision of ecosystems. Both individual and group
coordination by simple information sharing has its
limits and heavily relies on keeping all the software
in every actor of an ecosystem up to date to maintain
compatibility.
3.3 Isolated Execution of Untrusted
Software
Technologies like virtualization (Sahoo et al., 2010)
and sandboxing (Greamo and Ghosh, 2011) are the
industry-standard, among others, for isolating un-
trusted code from the rest of a system. These solu-
tions usually implement pass-through (Waldspurger
and Rosenblum, 2012; Yang et al., 2014) mechanisms
to allow the isolated software to access certain ser-
vices. Mobile application platforms (Laverty et al.,
2011) heavily build on such technologies to provide a
pass-through mechanism with user-configurable per-
mission control (Felt et al., 2011). Ensuring safety
in Cyber-Physical Systems was also inspired by these
technologies, Bak et al. proposed an idea (Bak et al.,
2011) of combining a sandbox with the Simplex Ar-
chitecture (Seto et al., 1998; Sha, 2001) to switch
between the execution of an unverified and verified
component. The main issue with these solutions is
that they only provide a binary solution to safety, i.e.
a complete switch to a safety mode, disallowing ac-
cess to the questionable agent. In complex ecosys-
tems, such solutions might be insufficient, given the
expected granularity of certainty about the component
trustworthiness (Halasz, 2022; Halasz and Buhnova,
2022).
3.4 Smart Agents in Autonomous
Ecosystems
Executing Smart Agents to coordinate members of an
ecosystem of Autonomous Vehicles is already a part
of the AUTOSAR standard (F
¨
urst et al., 2009). How-
ever, ensuring that a malicious agent can not do harm
in the ecosystem by leveraging trust as a decision fac-
tor is a relatively new idea (Cioroaica et al., 2019b).
Assessing the trustworthiness could be possible by
using predictive simulation on a Digital Twin of the
Smart Agent (see Figure 2) (Cioroaica et al., 2020a).
This approach already has some promising early re-
sults, and has certain aspects (namely the aspects of
Figure 2: Predictive simulation using a Digital Twin
(Cioroaica et al., 2019b).
ICSOFT 2023 - 18th International Conference on Software Technologies
396

trust goals) covered by a preliminary reference archi-
tecture (Cioroaica et al., 2020b). Unfortunately, the
research is still in its initial phases and there is no de-
tailed information about how it would ensure safety,
leaving it as a suggestion for future work.
4 CONCEPTUAL FRAMEWORK
In this paper, we envision a conceptual framework
for adaptive safety in Autonomous Ecosystems un-
der the execution of possibly untrustworthy Smart
Agents. The framework is inspired by the mecha-
nisms used in mobile application platforms, like An-
droid, which create an abstraction over a device and
use a permission-based access control around their
services (Laverty et al., 2011; Neuner et al., 2014;
Felt et al., 2011). However, instead of a binary
and user-controlled permission scheme, we propose
an adaptive non-binary solution (Halasz, 2022; Ha-
lasz and Buhnova, 2022) that can adjust the permis-
sions in real time, based on a continuously calcu-
lated trust score (Cioroaica et al., 2020a; Cioroaica
et al., 2019b). Our goal with this framework is to pro-
vide a sandbox for safe execution of third-party Smart
Agents in Cyber-Physical Systems (Cioroaica et al.,
2020b; Pivoto et al., 2021). The architectural view of
this framework is in Figure 3, combining the mecha-
nisms of both direct and indirect trust, as discussed in
Section 2.
4.1 Agent Execution Environment
The core of the sandbox depicted in Figure 3 is an
Agent Execution Environment that loads and runs
third-party Smart Agents. As stated before, this is in-
spired by mobile application platforms (Laverty et al.,
2011). Any loaded agent should be in a predefined
executable format that the environment understands
and supports. An Autonomous Vehicle should pro-
vide a platform with which the framework can inter-
face. Even though standardization efforts for such
platforms exist, in the context of safety, we can not
simply rely on the existence of a universal platform
that works consistently across vendors. In order to
overcome vendor-specific differences, a Virtual Vehi-
cle Interface is necessary. This interface would pro-
vide an abstraction using drivers to any standardized
vehicle platform, which shall allow the framework to
support any Autonomous Vehicle in the future.
4.2 Gatekeeper
The entry point into this framework is a Gatekeeper
responsible for receiving a bundle of a Smart Agent
with its Digital Twin. Having a single point of entry
for any incoming data reduces the possible attack sur-
face of the overall ecosystem. Its first task is to verify
the digital signature of the bundle and make sure that
both the Smart Agent and its Digital Twin are in the
right format. Additionally, some malicious instruc-
tions can be detected by heuristic scanning (Bazraf-
shan et al., 2013) and other static analysis (Gosain
and Sharma, 2015) techniques. A separate part of the
Gatekeeper is a Reputation Engine capable of send-
ing and receiving information about the reputation of
a Smart Agent, feeding the indirect-trust information
into the framework. This reputation information is
being consumed inside the framework by multiple in-
ternal components.
4.3 Digital Twin Verifier
Before allowing the Smart Agent or its Digital Twin to
be executed, the Digital Twin Verifier runs a set of se-
lected simulations on the Digital Twin (Boschert and
Rosen, 2016). The initial reputation received by the
Reputation Engine can affect the selection process. A
bundle with a high reputation that has already been
functioning in other Autonomous Vehicles can be ver-
ified faster by skipping some steps of the verification
process. On the other hand, a bundle with no history
and hence no/low reputation needs to go through a set
of more thorough checks. At the end of the verifica-
tion process, the Digital Twin is either passed further
to the Digital Twin Simulator or the framework rejects
the whole bundle. Regardless of this decision, the ver-
ification results are passed to the Trust Aggregator for
further processing.
4.4 Digital Twin Simulator
Within the framework, a successfully verified Dig-
ital Twin gets loaded into a predictive simula-
tion (Cioroaica et al., 2019b; Cioroaica et al., 2020a)
environment inside the Digital Twin Simulator. The
difference between the Verifier and the simulator is
that the latter works with a context received via a read-
only clone of the Virtual Vehicle Interface. This en-
sures that the Digital Twin has no way to alter the be-
havior of the vehicle under any circumstances, which
is crucial for safety control. While the simulation re-
lies on real-world data, it is ahead of the real world
by a short time difference to predict the behavior of
a Smart Agent. Similarly to the Verifier, any irregu-
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems
397

Figure 3: Architectural View of the Conceptual Framework.
Figure 4: Lifespan of the Digital Twin.
larities during the simulation are passed further to the
Trust Aggregator.
4.5 Comparator
Between the Digital Twin Verifier and the Agent Ex-
ecution Environment, a Comparator balances out the
time difference by acting as a buffer. Its main task is
to compare the results between these two components
and also to act as a continuous compliance checker. It
can detect any deviation between the behavior of the
Agent and the Digital Twin, which it can then report
to the Trust Aggregator.
4.6 Trust Aggregator
Any behavioral information about external reputation,
Digital Twin verification, simulation, and compliance
checking gets collected by the Trust Aggregator. As
its name suggests, this component continuously ag-
gregates all this information into a Trust Score. This is
a quantified subjective representation of the trustwor-
thiness of the Smart Agent. The actual representation
of the Trust Score depends on the chosen aggregation
method (Cho et al., 2015), e.g. a percentage or even
a vector of multiple percentages that represent vari-
ous aspects of the Autonomous Vehicle. If there is a
significant change in the Trust Score, the aggregator
can decide to trigger the Trust Propagator to pass the
Trust Score to the Reputation Engine and the outside
world (Govindan and Mohapatra, 2011).
4.7 Trust Gate
The final and most crucial component of the frame-
work is the Trust Gate between the Virtual Vehi-
cle Interface and the Vehicle Platform. Based on a
predefined Decision Tree (Halasz, 2022; Halasz and
Buhnova, 2022) and the continuously changing Trust
ICSOFT 2023 - 18th International Conference on Software Technologies
398
Score, it dynamically controls the access to features
provided by the Vehicle Platform. This tree is heav-
ily specific to the given Autonomous Vehicle and as-
signs the exposure or concealment of vehicle features
to Trust Scores.
The life cycle of the Digital Twin in terms of its
handling by the framework is illustrated in form of a
decision tree in Figure 4.
5 VALIDATION ON SELECTED
SCENARIOS
In this section, to better illustrate the proposed con-
cept, we demonstrate the envisioned framework on a
two scenarios. One in a Smart City with Intelligent
Transportation and another ono on a highway with ad-
hoc Vehicle Platooning.
5.1 Smart City
Consider a Smart City using a Smart Agent bundled
with its Digital Twin to enforce traffic rules. This bun-
dle is digitally signed by the local department of trans-
portation and it contains instructions for speed limits
and minimum speed requirements in certain areas of
the city. In order to enforce these rules, it requires ac-
cess to the following platform services: location and
positioning, speed limiter, emergency braking, cruise
control and lane switching control. Propagation is
solved by wireless networks created by roadside units
on the edges of the city premises.
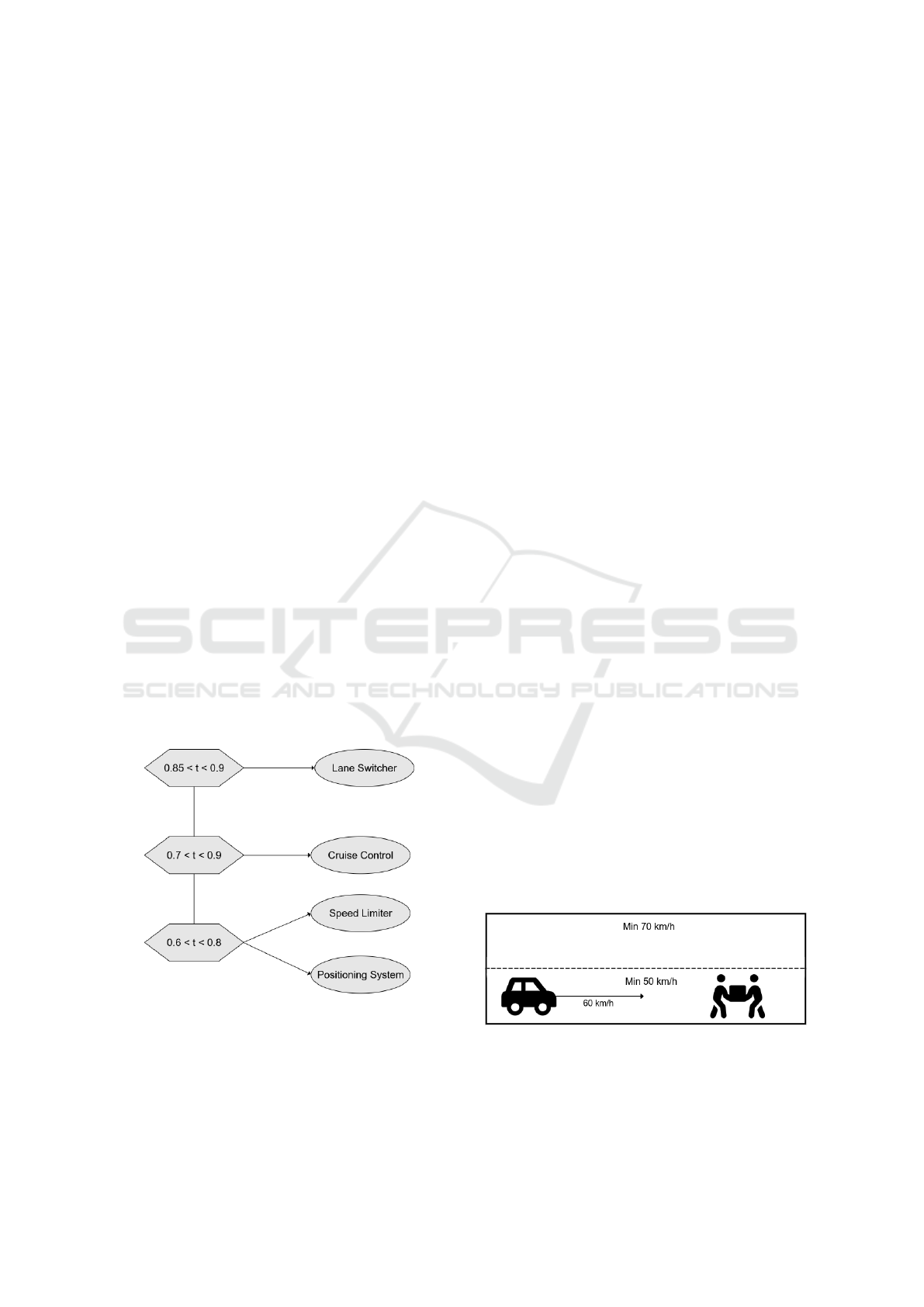
Figure 5: Simplified Decision Tree for Demonstration.
Imagine an Autonomous Vehicle implementing
our framework that is moving towards this city. Its
simplified Decision Tree is displayed in Figure 5, the
Trust Score is represented with a number from the in-
terval < 0, 1 > and the chosen aggregation method is
just an arithmetic average of all inputs. The vehicle
enters the premises of the city and automatically re-
ceives the bundle from the nearest wireless network.
The static analysis scanners in the Gatekeeper com-
ponent find everything correct, meanwhile the Trust
Aggregator receives a score of, let’s say, 0.4 from the
Reputation Engine which means that other vehicles
had poor past experience with this bundle. Based on
this low score, the Digital Twin Verifier runs all the
predefined simulation scenarios and verifies that all of
them pass. Therefore, the Trust Aggregator receives a
score of 1.0, calculates an initial Trust Score of, say,
0.7 and passes it further to the Trust Gate. According
to the vehicle-specific Decision Tree, the Trust Gate
allows initial access to the positioning system and the
speed limiter features.
At this point the Digital Twin Simulator starts test-
ing possible future scenarios using the real-world con-
text coming from the Read-only Virtual Vehicle Inter-
face. Meanwhile, the Smart Agent is loaded into the
sandbox and starts interfacing with the initially per-
mitted two platform services. As the vehicle moves
through a zone with limited speed, the Comparator
verifies that the Digital Twin is compliant with the ac-
tual behavior of the Smart Agent as both behave the
same way in case of a speed limit. This causes a grad-
ual increase in the Trust Score to, say, 0.8 and further
to 0.85 over time. This higher score triggers the Trust
Gate to expose the cruise control service to the sand-
box, which can be used to set a minimum speed for
the vehicle.
When the vehicle enters a two-lane road where
both lanes have a minimum speed requirement as vi-
sualized in Figure 6, the predictive simulation already
verified that the exposure of the cruise control service
did not cause any irregularities in the behavior of the
Digital Twin. In the meantime, the Smart Agent initi-
ates the cruise control to match the minimum speed of
the current lane where the vehicle is present. Due to
the fact that there is no deviation detected by the Com-
parator, the Trust Score is increased to 0.9, exposing
the lane-switching feature to the sandbox.
Figure 6: Two-lane road with minimum speeds and an ob-
stacle.
As the vehicle moves further on the road, its sen-
sors detect that there is an obstacle further in front
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems
399

of it. The Digital Twin Simulator runs a predictive
check of what would happen if the vehicle switches
lanes. Unfortunately, there would be a mismatch be-
tween the embedded collision avoidance system and
the Smart Agent as the latter would want to keep the
vehicle in the lane to match the speed, but that would
cause the vehicle to risk collision with the obstacle.
This unexpected result causes the Trust Aggregator to
reduce the Trust Score to 0.8, which disables the ac-
cess of the sandbox to lane switching. As the agent
can no longer interfere with the embedded collision
avoidance system, the vehicle changes lanes for the
time being to pass the obstacle.
It is possible, that the Smart Agent provided by
the city is outdated and did not get proper integra-
tion testing with modern collision avoidance systems.
This could explain the poor experience of other cars
that resulted in a 0.4 reputation score. On the other
hand, the speed-limiting feature works safely and the
adaptive mechanism in the framework did not limit its
reach.
5.2 Vehicle Platooning
Consider a single autonomous vehicle A on a three-
lane highway that is capable of running Smart Agents.
It has no software support for vehicle platooning, but
it is equipped with our framework. Gradually, vehi-
cles B, C and D implementing the same framework
(see Figure 7) join the highway, from which only ve-
hicle C contains a Smart Agent supporting Vehicle
Platooning.
Figure 7: Three-lane highway with four autonomous vehi-
cles not cooperating.
After some time passes to collect enough data
from its surroundings, vehicle C evaluates that if all
the vehicles join into a single lane and match their
speed and distance, they can improve their joint aero-
dynamic resistance and reduce overall fuel consump-
tion. The vehicle uses an ad-hoc wireless network to
propagate its bundle containing the Smart Agent and
its Digital Twin responsible for vehicle platooning to
all three neighboring vehicles. As the distance and
the network quality between these vehicles is differ-
ent, furthermore, they are manufactured by different
vendors, the time between propagation and adoption
of this bundle might differ for each vehicle. The first
to receive the bundle is vehicle A as it is the closest
to vehicle C. There might be reputation information
propagated alongside with the bundle, however, as it
is coming from the issuer of the Smart Agent, the Dig-
ital Twin Verifier is instructed to run all the tests on
the Digital Twin before allowing it to enter the Dig-
ital Twin Simulator. Similarly to the previous exam-
ple, upon successful verification, the Smart Agent and
the Digital Twin are loaded into their intended en-
vironment and the Trust Aggregator initially assigns
them a Trust Score of 0.75. This allows the Smart
Agent to access the cruise control feature of the Vehi-
cle Platform via the Trust Gate and results in vehicle
A maintaining the optimal distance for platooning and
matching the speed of vehicle C, while still staying in
different lanes.
Vehicles B and D are also going through the same
process, however, they can additionally consume the
Trust Score calculated by vehicle A and take it into
account when calculating their own Trust Score. This
results in a faster verification process as certain steps
already done by vehicle A can be omitted and a
slightly higher score of 0.8 which allows these two
vehicles to match their speed and distance required
for the platoon. As the Smart Agent in all three new
adopters has been proven as safe, the Trust Score in
all of them can gradually increase above the threshold
of 0.85, which enables the agent to access the lane
switcher feature. By exposing this feature, the Smart
Agent in each vehicle can instruct them to move to the
first lane and form the desired platoon (see Figure 8).
As all vehicles have a good experience with the
platooning agent, its Trust Score in each vehicle can
grow further to 0.90. This triggers the Trust Gate
of each vehicle to allow higher speeds via the Vehi-
cle Platform. If the predictive simulation in vehicle
D would detect behavior that is different from what
happens in reality, the Trust Score is lowered back to
0.85. This score automatically revokes the access of
the Smart Agent to higher speeds, and the vehicle can
Figure 8: Three-lane highway with four autonomous vehi-
cles forming a single platoon.
ICSOFT 2023 - 18th International Conference on Software Technologies
400

either leave the platoon by switching lanes or (if they
support adaptive cruise control) instruct the other cars
that it will gradually decrease its speed. Meanwhile,
the newly calculated score is propagated to the other
vehicles that can adjust their Trust Gate accordingly.
As long as the Trust Score towards the platooning
Smart Agent stays high in each vehicle, the platoon
will continue to operate, even if the initiator vehicle
C leaves the highway. It is even possible that the pla-
toon itself can outlive all its original members.
6 DISCUSSION
The proposed conceptual framework is still an ini-
tial step in our vision towards a solution for ensur-
ing safety in Autonomous Ecosystems by leveraging
trust. Some key components of the framework are not
fully specified yet or have been largely simplified in
order to facilitate the demonstration. Furthermore, it
is still not clear if it is feasible to use a single univer-
sal trust aggregation method and what should be the
actual representation of the Trust Score. Our plan for
the future is to find an answer to these questions and
give a more detailed description of the framework that
could be mapped to real-world scenarios.
6.1 Generalizability of the Concept
Although the framework has been designed to exe-
cute third-party Smart Agents, we see potential to uti-
lize the concept in different contexts of Autonomous
Cyber-Physical Systems. Both outside the vehicular
ecosystems and outside the execution of malicious
software. For instance, a sensor attached to a sys-
tem (e.g., Autonomous Vehicle) might produce in-
valid measurements and damage either the system it-
self or its surroundings. We believe that a similar
framework could overcome such problems by quanti-
fying to which degree the system can trust its individ-
ual sensors. Based on the Trust Score, the measured
values can be either ignored or adjusted. This solution
could bring a certain level of fault tolerance into the
system that was not available before.
6.2 Proof-of-Concept Implementation
This architecture could be implemented for dis-
tributed and collaborative software systems in Cloud
or Edge Computing environments. Container or-
chestration platforms such as Kubernetes already im-
plement a Role-based Access Control (RBAC) ser-
vice that governs the access for consumers of ser-
vice accounts to certain resources(Binnie and Mc-
Cune, 2021). By implementing a similar framework
on top of the Kubernetes platform, it would be possi-
ble to provide an analogous Trust-based access con-
trol (TBAC) service that would govern resource ac-
cess based on the trust between these consumers of
service accounts. Individual pods could also tap into
this service and leverage its features to restrict or grant
access to other pods interacting with it.
Research around the use of edge computing in
the supporting architecture for autonomous vehi-
cles (Tang et al., 2021; Sandu and Susnea, 2021; Tian
et al., 2022) already leverages Kubernetes and simi-
lar platforms. There is already an approach to turn
parked Autonomous Vehicles currently not in use to
edge devices (Nguyen et al., 2022). This suggests
a possible future where Autonomous Vehicles would
use Kubernetes as the base of their software stack.
This would open the possibility of a reference imple-
mentation of our framework purely using Kubernetes
resources. In this case it would have a minimal differ-
ence from the previously described TBAC service.
6.3 Flipping the Concept
The solution proposed in this paper supports the
increase of safety in an overall collaborative Au-
tonomous Ecosystem via the support for the safe ex-
ecution of a Smart Agent by a system acting as a
host for the agent. Another interesting opportunity
for safety assurance of a collaborative ecosystem that
supports the execution of a Smart Agent in an individ-
ual ecosystem member is to use the Smart Agents to
control the safe behaviour of the host system to pre-
vent it from engaging in harmful actions towards its
collaborators (e.g., a vehicle hitting a break when in
the middle of a platoon). This essentially means flip-
ping the idea. Besides looking at a potentially untrust-
worthy Smart Agent executing in a trustworthy host
system, we would like to investigate the support for
a trustworthy Smart Agent executing in a potentially
untrustworthy host system (and controlling it towards
its safer behaviour). In our future work, we would like
to elaborate on this idea further.
7 CONCLUSION
The unstoppable evolution of Autonomous Ecosys-
tems requires a new approach to ensure the safe op-
eration of both the individual member systems and
the ecosystem as a whole. Coordinating a set of het-
erogeneous Autonomous Systems (e.g., vehicles) by
simple information sharing is not sufficient to han-
dle dynamic context changes and uncertain situations.
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems
401

A more effective solution could be to employ Smart
Agents distributed and deployed at the collaborating
systems to facilitate their coordination. However, this
inherently carries new types of threats to safety that
need to be addressed. Our approach builds on as-
sessing the trustworthiness of these Smart Agents by
using predictive simulation and leverages the result-
ing Trust Score as a decision factor in what system
services should be exposed to them. In this paper,
we present a conceptual framework implementing this
idea, tailored to the context of Autonomous Vehicles,
and demonstrate it on a simple scenario. The next
steps in our research are to create a reference imple-
mentation of the proposed framework and validate it
with the help of our industrial partners.
ACKNOWLEDGEMENTS
This research was supported by ERDF ”Cy-
berSecurity, CyberCrime and Critical Informa-
tion Infrastructures Center of Excellence” (No.
CZ.02.1.01/0.0/0.0/16 019/0000822).
REFERENCES
Arcaini, P., Riccobene, E., and Scandurra, P. (2015). Mod-
eling and analyzing mape-k feedback loops for self-
adaptation. In 2015 IEEE/ACM 10th International
Symposium on Software Engineering for Adaptive and
Self-Managing Systems, pages 13–23.
Axelsson, J. (2016). Safety in vehicle platooning: A sys-
tematic literature review. IEEE Transactions on Intel-
ligent Transportation Systems, 18:1–13.
Bak, S., Manamcheri, K., Mitra, S., and Caccamo, M.
(2011). Sandboxing controllers for cyber-physical
systems. In 2011 IEEE/ACM Second International
Conference on Cyber-Physical Systems, pages 3–12.
Bakirtzis, G., Carr, S., Danks, D., and Topcu, U. (2022).
Dynamic certification for autonomous systems.
Banerjee, A., Venkatasubramanian, K. K., Mukherjee, T.,
and Gupta, S. K. S. (2012). Ensuring safety, security,
and sustainability of mission-critical cyber–physical
systems. Proceedings of the IEEE, 100(1):283–299.
Bazrafshan, Z., Hashemi, H., Fard, S. M. H., and Hamzeh,
A. (2013). A survey on heuristic malware detection
techniques. In The 5th Conference on Information and
Knowledge Technology, pages 113–120. IEEE.
Binnie, C. and McCune, R. (2021). Kubernetes authoriza-
tionwith rbac.
Boschert, S. and Rosen, R. (2016). Digital twin—the sim-
ulation aspect. Mechatronic futures: Challenges and
solutions for mechatronic systems and their designers,
pages 59–74.
Bouchelaghem, S., Bouabdallah, A., and Omar, M. (2020).
Autonomous Vehicle Security: Literature Review of
Real Attack Experiments. In The 15th International
Conference on Risks and Security of Internet and Sys-
tems, Paris, France.
Buhnova, B. (2023). Trust management in the Internet
of Everything. In Proceedings of the 16th European
Conference on Software Architecture-Companion Vol-
ume, pages 1–13. To appear in Springer. Preprint at
http://arxiv.org/abs/2212.14688.
Capilla, R., Cioroaica, E., Buhnova, B., and Bosch, J.
(2021). On autonomous dynamic software ecosys-
tems. IEEE Transactions on Engineering Manage-
ment, pages 1–15.
Cho, J.-H., Chan, K., and Adali, S. (2015). A survey on
trust modeling. ACM Comput. Surv., 48(2).
Cioroaica, E., Buhnova, B., Kuhn, T., and Schneider, D.
(2020a). Building trust in the untrustable. In 2020
IEEE/ACM 42nd International Conference on Soft-
ware Engineering: Software Engineering in Society
(ICSE-SEIS), pages 21–24. IEEE.
Cioroaica, E., Chren, S., Buhnova, B., Kuhn, T., and Dim-
itrov, D. (2019a). Towards creation of a reference ar-
chitecture for trust-based digital ecosystems. In Pro-
ceedings of the 13th European Conference on Soft-
ware Architecture-Volume 2, pages 273–276.
Cioroaica, E., Chren, S., Buhnova, B., Kuhn, T., and Dim-
itrov, D. (2020b). Reference architecture for trust-
based digital ecosystems. In 2020 IEEE Interna-
tional Conference on Software Architecture Compan-
ion (ICSA-C), pages 266–273. IEEE.
Cioroaica, E., Kuhn, T., and Buhnova, B. (2019b). (do not)
trust in ecosystems. In 2019 IEEE/ACM 41st Inter-
national Conference on Software Engineering: New
Ideas and Emerging Results (ICSE-NIER), pages 9–
12. IEEE.
Cioroaica, E., Purohit, A., Buhnova, B., and Schneider,
D. (2021). Goals within trust-based digital ecosys-
tems. In 2021 IEEE/ACM Joint 9th International
Workshop on Software Engineering for Systems-of-
Systems and 15th Workshop on Distributed Software
Development, Software Ecosystems and Systems-of-
Systems (SESoS/WDES), pages 1–7. IEEE.
Cui, J., Liew, L. S., Sabaliauskaite, G., and Zhou, F. (2019).
A review on safety failures, security attacks, and avail-
able countermeasures for autonomous vehicles. Ad
Hoc Networks, 90:101823. Recent advances on secu-
rity and privacy in Intelligent Transportation Systems.
Felt, A. P., Chin, E., Hanna, S., Song, D., and Wagner, D.
(2011). Android permissions demystified. In Proceed-
ings of the 18th ACM conference on Computer and
communications security, pages 627–638.
F
¨
urst, S., M
¨
ossinger, J., Bunzel, S., Weber, T., Kirschke-
Biller, F., Heitk
¨
amper, P., Kinkelin, G., Nishikawa, K.,
and Lange, K. (2009). Autosar–a worldwide standard
is on the road. In 14th International VDI Congress
Electronic Systems for Vehicles, Baden-Baden, vol-
ume 62, page 5. Citeseer.
Gosain, A. and Sharma, G. (2015). Static analysis: A survey
of techniques and tools. In Intelligent Computing and
Applications: Proceedings of the International Con-
ference on ICA, 22-24 December 2014, pages 581–
591. Springer.
ICSOFT 2023 - 18th International Conference on Software Technologies
402

Govindan, K. and Mohapatra, P. (2011). Trust computa-
tions and trust dynamics in mobile adhoc networks: A
survey. IEEE Communications Surveys & Tutorials,
14(2):279–298.
Greamo, C. and Ghosh, A. (2011). Sandboxing and virtual-
ization: Modern tools for combating malware. IEEE
Security Privacy, 9(2):79–82.
Halasz, D. (2022). From systems to ecosystems: Rethink-
ing adaptive safety. In 17th International Sympo-
sium on Software Engineering for Adaptive and Self-
Managing Systems (SEAMS ’22). IEEE.
Halasz, D. and Buhnova, B. (2022). Rethinking safety
in autonomous ecosystems. In The 17th Conference
on Computer Science and Intelligence Systems, pages
81–87. IEEE.
Iqbal, D. and Buhnova, B. (2022). Model-based approach
for building trust in autonomous drones through digi-
tal twins. In 2022 IEEE International Conference on
Systems, Man, and Cybernetics (SMC). IEEE.
Jahan, F., Sun, W., Niyaz, Q., and Alam, M. (2019). Secu-
rity modeling of autonomous systems: A survey. ACM
Comput. Surv., 52(5).
Kusnirakova, D. and Buhnova, B. (2023). Rethinking
certification for higher trust and ethical safeguard-
ing of autonomous systems. In Proceedings of
the 18th International Conference on Evaluation of
Novel Approaches to Software Engineering (ENASE).
Scitepress.
Lahno, B. (2001). On the emotional character of trust. Eth-
ical theory and moral practice, 4(2):171–189.
Laverty, J. P., Wood, D. F., Kohun, F. G., and Turchek, J.
(2011). Comparative analysis of mobile application
development and security models. Issues in Informa-
tion Systems, 12(1):301–312.
Li, G., Yang, Y., Zhang, T., Qu, X., Cao, D., Cheng, B.,
and Li, K. (2021). Risk assessment based collision
avoidance decision-making for autonomous vehicles
in multi-scenarios. Transportation Research Part C:
Emerging Technologies, 122:102820.
Mayer, R. C., Davis, J. H., and Schoorman, F. D. (1995).
An integrative model of organizational trust. The
Academy of Management Review, 20(3):709–734.
McKinley, P., Sadjadi, S., Kasten, E., and Cheng, B. (2004).
Composing adaptive software. Computer, 37(7):56–
64.
Neuner, S., van der Veen, V., Lindorfer, M., Huber, M.,
Merzdovnik, G., Mulazzani, M., and Weippl, E. R.
(2014). Enter sandbox: Android sandbox comparison.
CoRR, abs/1410.7749.
Nguyen, K., Drew, S., Huang, C., and Zhou, J. (2022).
Parked vehicles task offloading in edge computing.
IEEE Access, 10:41592–41606.
Pivoto, D. G., de Almeida, L. F., da Rosa Righi, R., Ro-
drigues, J. J., Lugli, A. B., and Alberti, A. M. (2021).
Cyber-physical systems architectures for industrial in-
ternet of things applications in industry 4.0: A lit-
erature review. Journal of manufacturing systems,
58:176–192.
Ramos, M. A., Thieme, C. A., Utne, I. B., and Mosleh,
A. (2019). Autonomous systems safety–state of the
art and challenges. In Proceedings of the First In-
ternational Workshop on Autonomous Systems Safety.
NTNU.
Rosen, R., Von Wichert, G., Lo, G., and Bettenhausen,
K. D. (2015). About the importance of autonomy and
digital twins for the future of manufacturing. Ifac-
papersonline, 48(3):567–572.
Rotter, J. B. (1980). Interpersonal trust, trustworthiness, and
gullibility. American psychologist, 35(1):1.
Sagar, S., Mahmood, A., Sheng, Q. Z., Pabani, J. K., and
Zhang, W. E. (2022). Understanding the trustworthi-
ness management in the social internet of things: A
survey. arXiv preprint arXiv:2202.03624.
Sahoo, J., Mohapatra, S., and Lath, R. (2010). Virtualiza-
tion: A survey on concepts, taxonomy and associated
security issues. In 2010 Second International Con-
ference on Computer and Network Technology, pages
222–226.
Sandu, C. and Susnea, I. (2021). Edge computing for au-
tonomous vehicles-a scoping review. In 2021 20th
RoEduNet Conference: Networking in Education and
Research (RoEduNet), pages 1–5. IEEE.
Seto, D., Krogh, B., Sha, L., and Chutinan, A. (1998). The
simplex architecture for safe online control system up-
grades. In Proceedings of the 1998 American Control
Conference. ACC (IEEE Cat. No.98CH36207), vol-
ume 6, pages 3504–3508 vol.6.
Sha, L. (2001). Using simplicity to control complexity.
IEEE Software, 18(4):20–28.
Tang, S., Chen, B., Iwen, H., Hirsch, J., Fu, S., Yang,
Q., Palacharla, P., Wang, N., Wang, X., and Shi,
W. (2021). Vecframe: A vehicular edge computing
framework for connected autonomous vehicles. In
2021 IEEE International Conference on Edge Com-
puting (EDGE), pages 68–77. IEEE.
Taylor, A. J. and Ames, A. D. (2020). Adaptive safety with
control barrier functions. In 2020 American Control
Conference (ACC), pages 1399–1405.
Tian, J.-S., Huang, S.-C., Yang, S.-R., and Lin, P. (2022).
Kubernetes edge-powered vision-based navigation as-
sistance system for robotic vehicles. In 2022 Interna-
tional Wireless Communications and Mobile Comput-
ing (IWCMC), pages 457–462. IEEE.
Waldspurger, C. and Rosenblum, M. (2012). I/o virtualiza-
tion. Communications of the ACM, 55(1):66–73.
Yang, C.-T., Liu, J.-C., Wang, H.-Y., and Hsu, C.-H. (2014).
Implementation of gpu virtualization using pci pass-
through mechanism. The Journal of Supercomputing,
68:183–213.
Conceptual Framework for Adaptive Safety in Autonomous Ecosystems
403
