
Agent Based In-Situ Visualization by Guide Field
Yan Wang
a
and Akira Kageyama
b
Graduate School of System Informatics, Kobe University, Kobe 657-8501, Japan
Keywords:
High Performance Computing, In Situ Visualization, Agent Based Modeling.
Abstract:
In situ visualization has become an important research method today in high performance computing. In our
previous study, we proposed 4D Street View (4DSV), in which multiple visualization cameras are scattered
in the simulation region for interactive analysis of visualization video files after the simulation. A challenge
in the 4DSV approach is to increase the camera density around a local area of the simulation box for detailed
visualizations. To make the cameras automatically identify such a local region or Volume of Interest (VOI), we
propose introducing the concept of a swarm of visualization cameras, which is an application of agent-based
modeling to in-situ visualization. The camera agents in the camera swarm are autonomous entities. They find
VOIs by themselves and communicate with each other through a virtual medium called a visualization guide
field that is distributed in the simulation space.
1 INTRODUCTION
The post hoc visualization is the standard way for
scientific visualization today, especially in high-
performance computing (HPC). A drawback of the
post hoc visualization method is that it inevitably ac-
companies massive numerical data that is to be stored
and transferred. On the other hand, the in-situ visu-
alization (Childs et al., 2020) enables directly retriev-
ing visualization images without going through mas-
sive numerical data (Bennett et al., 2018; Tikhonova
et al., 2010a; Tikhonova et al., 2010b; Ye et al., 2013;
Kawamura et al., 2016; Childs et al., 2022; Demarle
and Bauer, 2021).
A challenge in in-situ visualization is compensat-
ing for its lack of interactivity. Here, interactivity
means real-time control of visualization settings such
as viewpoint position, viewing direction, and other
parameters in terms of adopted visualization algo-
rithms, e.g., the level of the isosurface. The visualiza-
tion setting should be prescribed before a simulation
starts in the in-situ visualization.
We proposed an in-situ visualization approach that
enables interactive analysis, rather than interactive
control, of the in-situ visualization setting though vi-
sualized video files (Kageyama and Yamada, 2014).
The key idea is to apply multiple in-situ visualiza-
tions from many different viewpoints at once, then to
a
https://orcid.org/0000-0001-7700-0998
b
https://orcid.org/0000-0003-0433-668X
apply the interactive exploration of the video dataset
produced by the in-situ visualization. A similar
image-based approach to in-situ visualization is Cin-
ema (Ahrens et al., 2014; O’Leary et al., 2016). By
generalizing our video-based method, we proposed
“4D Street View (4DSV)” (Kageyama and Sakamoto,
2020; Kageyama et al., 2020), where we place thou-
sands omnidirectional cameras having a full (=4π
steradians) field of view. The viewpoint and view-
ing direction can then be changed interactively, like
Google Street View (Anguelov et al., 2010), through
a PC application called 4D Street Viewer.
In computer simulations, visualization is com-
monly applied intensively to only a tiny portion of the
entire simulation space. We refer such a localized re-
gion as Volume of Interest (VOI) in this paper.
If the location and size of a VOI is known before
the simulation starts, we can place the visualization
viewpoints, or cameras, intensively around there. The
phenomena occurring in the VOI can be analyzed in-
teractively by the 4D Street Viewer. However, there
are possible cases where the location and motion of a
VOI is unpredictable.
A straightforward resolution for those cases is
to increase the total number of visualization cam-
eras, decreasing the distances between the cameras.
We can perform 4DSV with O(10
3
) omnidirectional
cameras with no problem (Kageyama and Sakamoto,
2020; Kageyama et al., 2020), but it is practically dif-
ficult to increase the camera number to O(10
4
), or
332
Wang, Y. and Kageyama, A.
Agent Based In-Situ Visualization by Guide Field.
DOI: 10.5220/0012092800003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 332-339
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

more, because of computational costs.
This paper aims to propose a new method that al-
lows 4DSV with high spatial camera density with rel-
atively small number of visualization cameras, even
for unpredictable VOI behaviors.
The concept of Agent Based Visualization (ABV)
was proposed in 2017 (Grignard and Drogoul, 2017),
which combines Agent Based Model (ABM) with
information visualization in general. We proposed
an applicaiton of ABV to in-situ visualization for
HPC (Wang et al., 2022; Wang et al., 2023). In our
agent-based in situ visualization method, the agents
are visualization cameras that autonomously identify
and track VOIs by following prescribed simple rules
and applying in situ visualization.
Only the case of a single autonomous camera
tracking the motion of an unpredictable VOI was
shown in the previous work. As a natural extension,
we propose a method where multiple camera agents
follow multiple VOIs, in this paper. The challenges
here are the followings: (i) An agent should pick out
the closest VOI among multiple VOIs and get closer
to the VOI; (ii) the agent should track the VOI motion
with keeping an appropriate distance for visualiza-
tion; and (iii) agents that track the same VOI should
maintain an appropriate mutual distance each other so
as not to apply visualization of the same VOI from al-
most the same viewpoint.
In short our approach incorporates the intelligence
of a swarm into camera agents for in-situ visualiza-
tion. According to our process, camera agents can
autonomously communicate with each other and the
environment and other camera agents to determine the
location of VOI and acquire VOI-related images, al-
lowing a limited number of camera agents to acquire
more critical information about the simulated envi-
ronment.
In Section 2, we introduce the idea of agent-based
modeling (ABM) and the technical details of this
method. In Section 3, we perform test calculations
to verify the feasibility of the method proposed in this
paper. And Section 4 concludes this paper.
2 METHOD
2.1 Agent Motion
Generally, ABM consists of two parts; environment
and agents (Wilensky and Rand, 2015). According to
prescribed rules, each agent interacts with the envi-
ronment and other agents.
Our proposed method considers multiple visu-
alization viewpoints as a swarm of agents (Beni
and Wang, 1993). Rules for the camera agents
are designed to track multiple VOIs efficiently as a
group (Dorigo and Blum, 2005).
The environment for the camera agents is a vec-
tor field called Visualization Guide Field (VGF) that
corresponds to the pheromones used in ABM for ant
colony (Dorigo and Blum, 2005; Deneubourg et al.,
1990; Tisue and Wilensky, 2004). Each agent moves
toward the VGF vector at its position; the VGF medi-
ates all interactions between VOI and agents as well
as among the agents.
We solve Newton’s equation of motion for each
agent, assuming that agents have unit mass. The force
acting on the agents is a function of position deter-
mined by the VGF. Additional drag force proportional
to the agent velocity is also introduced to damp high-
frequency oscillations.
Agents should have two essential traits. First,
they should move toward a nearby VOI. Second, they
should keep an appropriate distance from each other.
To achieve the dual goals, we exploit the analogy
of the electrostatic field: The VOI has a positive elec-
tric charge +Q > 0, and the agents have a negative
charge −q < 0, where Q > q.
A negatively charged camera agent is attracted to
the positively charged VOI, and the camera agent vi-
sualizes the VOI in detail from close up. The neg-
atively charged camera agents are repelled by each
other, so they avoid the waste of being located in the
same place to visualize the same position.
The interaction between the VOI and the camera
agent is unilateral. The agent changes its position
due to the electric field caused by the VOI’s posi-
tive charge, but the VOI is not affected by agents
even if it is closely located. In other words, the “real
space” in which the simulation is going on and the
“virtual space” in which the agents reside share the
space-time, but the interaction is one-way from the
real space to the virtual space.
We can regard the electric potential of the VGF’s
electric field corresponds to the pheromone used
ABMs (Deneubourg et al., 1990) in general.
The location of VOIs is specified in the simulation
program in this work. The main purpose of VGF is to
attract camera agents to the specified location of VOI.
Negatively charged camera agents are automatically
attracted to the positive VOI. When there are two or
more VOIs, the VGF is given by the superposition of
fields generated by each VOI. Since VGF decays as a
function of radius in the inverse square law, an agent
is attracted naturally toward the nearest VOI.
The spherically symmetric VGF generated by a
positively charged VOI is useful when the VOI should
be visualized from a point near the VOI from any an-
Agent Based In-Situ Visualization by Guide Field
333

gle. But there are cases when some VOI should be vi-
sualized from a certain angle and the angle is known
in the simulation. For example, in a fluid simulation
in which vortex-rings are spontaneously formed. The
VOI in this case can be specified in the simulation
program as the local region where the enstrophy is
spatially localized. The ring formation is detected by
the distribution of the enstrophy density in the simula-
tion. In those cases, camera agents should be attracted
to the VOI, along the axis of the ring in order to get a
better visualization of the ring formation process.
In order to guide the camera agents along a pre-
scribed direction, we introduce a dipole-type field
as a VGF. The spherically symmetric VGF is called
monopole-type VGF.
In short, there are two types of VOI; monopole
VOI and dipole VOI. A monopole VOI is a spherically
distributed electric charge density with a net positive
charge whose origin is the center of the VOI. A dipole
VOI is a dipolar distribution of electric charge den-
sity whose moment vector is in the direction parallel
to the appropriate view-direction for the in-situ visu-
alization.
2.2 Visualization Guide Field
2.2.1 Spherical Double Layer: General Case
The dipole electric field by a point charge has a sin-
gular behaviour near r = 0. It has infinitely strong
electric field near the point. In addition, we want the
camera agents to keep a proper distance from the VOI
center at r = 0. Because of these reasons, we realize
the monopole electric field outside a specific radius
by assuming an inner structure of charge density dis-
tribution in the sphere.
Suppose the center of VOI, x, is at the origin, i.e.,
x = 0, and the radius of the VOI is b. We assume
a doubly layered spherical shell with the radii r = a
and r = b. We set a uniform negative charge density
−ρ
0
in a sphere of radius a, i.e., for radius r with 0 ≤
r ≤ a, and we set a uniform positive charge density
+ρ
0
in the spherical shell a < r ≤ b. We assume the
permeability ε
0
in the SI unit system is 1.
Applying the Gauss’ divergence theorem to the re-
lationship between the electric field E and the charge
density ρ, i.e., ∇ ·E = ρ,
Z
S
E ·r dS =
Z
ρdV. (1)
Due to the spherical symmetry of the system, the
electric field E caused by the spherically distributed
charge density has only the radial component E
r
, i.e.,
E = E
r
(r)
ˆ
r, where
ˆ
r is the radial unit vector.
The radial component is given as
E
r
(r) =
−
Q
a
4πa
3
r (0 < r ≤ a)
Q
a
4πa
3
r −
2a
3
r
2
(a < r ≤ b)
Q
a
4πa
3
b
3
−2a
3
r
2
(b ≤ r).
(2)
Here
Q
a
=
4πa
3
3
ρ
0
(3)
is the total amount of charge in the sphere of r ≤ a if
constant positive charge +ρ
0
is uniformly distributed.
In fact, since −ρ
0
is distributed, the total amount of
charge in the sphere of r ≤a is −Q
a
. The ratio of the
two radii r = a and r = b determines the total charge in
the sphere r ≤ b and therefore the sign of the electric
field E
r
(r) outside the sphere r > b. If b > b
0
, then
E
r
(r) > 0 for r ≥ b, where
b
0
=
3
√
2a ∼ 1.260 a (4)
Integrating eqs. (2), we get the potential φ of this
electric field as
φ(r) =
ρ
0
6
r
2
−ρ
0
a
2
+
ρ
0
2
b
2
+ c
0
(0 ≤ a)
−
ρ
0
3
r
2
2
+
2a
3
r
+
ρ
0
2
b
2
+ c
0
(a ≤ r < b)
ρ
0
3
b
3
−2a
3
r
+ c
0
(b ≤ r)
(5)
where c
0
is the integration constant.
2.2.2 Electric Field of Monopole VOI
Because there is no particular rule to determine the
value of b, we set b = b
1
for the monopole VOI with
b
1
=
√
2a ∼ 1.414 a (6)
The potential at the origin φ(0) = 0 with this b,
see eq. (2). The charge density distribution for the
monopole VOI is schematically shown in Fig. 1.
For later convenience, we explicitly write the ra-
dial electric field of the monopole-type VOI as E
m
with b = b
1
in eqs. (2):
E
m
r
(r) =
−
Q
a
4πa
3
r (0 < r ≤ a)
Q
a
4πa
3
r −
2a
3
r
2
(a < r ≤ b
1
)
Q
a
4π
α
r
2
(b
1
≤ r)
(7)
where
α = 2
3
2
−2 ∼0.828 (8)
The function E
m
r
(r) is monotonically decreasing
for 0 < r ≤ a, monotonically increasing for a <
r ≤ b
1
, and monotonically decreasing for b
1
< r.
E
m
r
(b
0
) = 0.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
334

Figure 1: Schematic figure for the charge density distribu-
tion of monopole-type VOI. The white dot is in the center
of the VOI, located at the origin of the two circles. The dark
blue circle with radius a has a uniform distribution of neg-
ative charges; the light blue circle between radius a and ra-
dius b
1
has a uniform distribution of positive charges, which
attracts the camera agent with a negative charge.
2.2.3 Electric Field of Dipole-Type VOI
The monopole VOI attracts camera agents, which are
negatively charged, and make them apply in-situ visu-
alization from all directions around the VOI’s center.
There are cases when visualizations should be ap-
plied from a specific direction and the direction is
known from the simulation program. To lead the cam-
era agents toward the desired position near the VOI’s
center to apply the in-situ visualization from the de-
sired direction, we introduce a dipole-type VOI. The
key idea is to make an electrical dipole field outside
a sphere r = b
1
. The field-lines of the dipole field
guide the negatively charged camera agents along the
curved lines. The camera agents are naturally lead to
the positive pole of the VOI’s dipole.
As in the case of the monopole VOI, the pure
dipole causes numerical trouble due to the singular
behavior with rapidly increasing values near the ori-
gin r = 0. To avoid the problem, we introduce inner
structure inside the sphere of r = b
1
.
The potential of the dipole field with dipole mo-
ment p is (under the assumption of ε
0
= 1),
1
4π
p ·r
r
3
(9)
which decays as a function of distance r as r
−3
for
b
1
≤ r. This is different from the r
−2
dependence of
the radial electric field of monopole type VOI. The
difference causes an undesired behavious of a camera
agent; it can be more strongly attracted by a monopole
VOI than by a dipole VOI even the latter is closer to
the former. In order to release the difference of the r-
dependency, we use the following “quasi-dipole” po-
tential,
˜
φ(r) =
1
4π
p ·r
r
2
(10)
We adopt the quasi-dipole electric field E = −∇
˜
φ in
r < b
1
.
Figure 2: The electric field distribution around the dipole
VOI.
˜
E(r) = −
1
4πr
2
p −
2(p ·r)
r
2
r
(11)
for b
1
≤ r which decays as r
−2
.
As for the electric field inside the sphere of r = b
1
,
we smoothly connect the dipole field outside r ≥ b
1
and a monopole-type electric field inside r ≤ b
0
.
To put more precisely, we assume the radial elec-
tric field by a spherical double layer of eq. (2) with
b = b
0
.
E
d
r
(r) =
−
Q
a
4πa
3
r (0 < r ≤ a)
Q
a
4πa
3
r −
2a
3
r
2
(a < r ≤ b
0
)
(12)
Note that E
r
(r) = 0 for r > b
0
in this case of b = b
0
=
3
√
2.
In the intermediate layer of b
0
< r ≤ b
1
, we as-
sume the dipole field of eq. (11) with an attenuation
factor
H(r) =
r −b
0
c −b
0
(13)
as
E(r) = H(r)
˜
E(r) (14)
in order to smoothly decay the dipole field toward
zero at r = b
0
.
In summary, the electric field of a (quasi-)dipole-
type VOI with pseudo-dipole moment p placed at the
origin is given by
E
d
(r) =
−
Q
a
4πa
3
r (0 < r ≤ a)
+
Q
a
4πa
3
r −
2a
3
r
3
r
(a < r ≤ b
0
)
−H(r)
1
4πr
2
p −
2(p·r)
r
2
r
(b
0
< r ≤ b
1
)
−
1
4πr
2
p −
2(p·r)
r
2
r
(b
1
≤ r)
(15)
The electric field distribution around the dipole
VOI is shown in Fig. 2, each arrow denotes the di-
rection of the electric field.
Agent Based In-Situ Visualization by Guide Field
335
2.2.4 Multiple VOIs
In simulation in general, multiple VOIs could ap-
pear for in-situ visualizations. Suppose we place
n
m
monopole VOIs and n
d
dipole VOIs. We denote
VOI radius a
i
and the center position x
i
for i-th VOI
(i = 1, 2, . . . , n
m
). and the same for the dipole VOIs.
The relative position vector from the VOI center
to a point in the space is given by
r
i
= x −x
i
, (16)
with the distance
r
i
= |r
i
|, (17)
and unit vector
ˆ
r
i
=
r
i
r
i
. (18)
As in the case of the real electric field, we assume
the linearity, or superposition principle, of the electric
fields generated by multiple VOIs.
The electric field for a camera agent at the posi-
tion x is given by the supoerposition of the monopole
fields and dipole fields as,
E(x) =
n
m
∑
i=1
E
m
r
(r
i
)
ˆ
r
i
+
n
d
∑
i=1
E
d
r
(r
i
)
ˆ
r
i
(19)
The computational cost of this VGF field is negligibly
small.
3 TEST
We have performed test calculations to validate the
visualization guide field (VGF) method described
above. The purpose of these tests are to confirm
the agents motion. Visualization by these camera
agents are not considered here. Another note on
these tests are on the dimension of the computation.
In the derivations of the VGF, we assumed the 3-
dimensional space. We validate this field on a plane
in the 3D space on which the center of VOI is located.
Assuming that all agents are on the same plane in the
initial condition, we solve the motion of the agents
only in this 2D plane.
The following test simulations are performed by
PC and the simulation programs are written in Pro-
cessing language.
3.1 Monopole VOI
Fig. 3 shows a sequence of snapshots of time devel-
opment of camera agents when we place a monopole
VOI at a fixed position. Multiple agents that are
randomly distributed in the plane starts sensing the
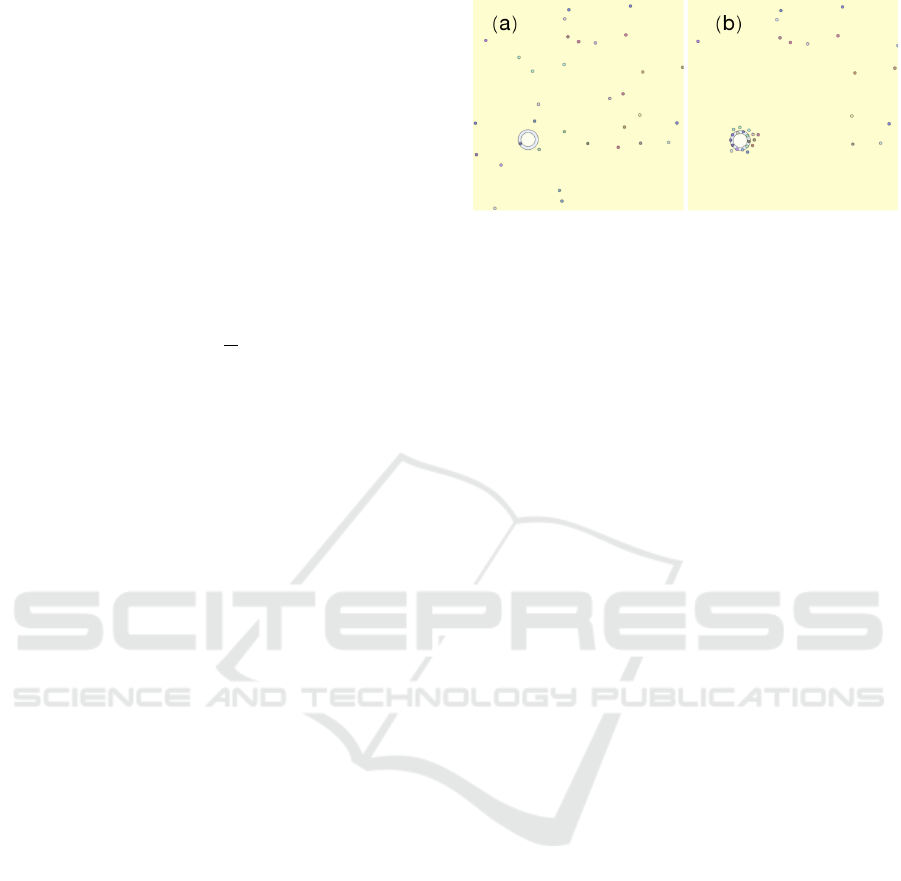
Figure 3: The motion of camera agents when a monopole
VOI (large double circles with white and gray color) is
fixed. (a) The original distribution of the camera agents.(b)
The agents are uniformly located near the monopole VOI.
monopole-type VGF and moving toward the center
of the monopole. The agents that were close to the
monopole VOI evenly distribute it at the most suit-
able distance from the monopole VOI, i.e., around the
circumference of radius b
0
.
In order to check the track-ability of agents for
moving monopole VOI, we place a moving VOI of
the monopole type. The motion of the VOI is pre-
scribed by combinations of sinusoidal functions of
time in these tests.
Fig. 4 shows a time sequence from a period, the
monopole VOI oscillates horizontally in this case.
The camera agents that were initially distributed
about the whole plane are attracted to the VOI and
they follow a little behind the VOI as a group.
We have also performed tests in two dimensional
monopole VOI motion, confirming that the agents can
track the VOI motion as long as the VOI speed is not
too high.
We also performed tests when the monopole VOI
makes random movements. the camera agents can
successfully find and track the monopole VOI as
shown in Fig. 5.
3.2 Dipole VOI
Fig. 6 shows a snapshot when a dipole-type VOI is
placed on the plane. The dipole moment is indi-
cated by arrow in the VOI circle. The camera agents
that were randomly distributed in the initial condition
senses the dipole field and move along the field-line.
They eventually accumulate around the “pole” of the
dipole. This is the desired behaviour of the agents
to realize the in-situ visualization of the VOI from a
specific angle.
As shown in Fig. 7, when the dipole VOI does
random motion, the camera agent can still detect and
track the dipole VOI in time and can maintain a spe-
cific view of the dipole VOI.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
336

Figure 4: Camera agents when a monopole VOI is making a
one-dimensional harmonic oscillation. (a) The original dis-
tribution of the monopole VOI and camera agents; (b) to (h)
The camera agents gradually converging to the monopole
VOI and following a little behind it as a group. (i) and (j)
The camera agents successfully track the orbit of the VOI,
but the lag becomes larger for a faster-moving VOI.
3.3 Multiple VOIs
The next experiment is to take into account how the
camera agent will move when multiple monopole
VOIs are present at the same time. As shown in Fig. 8,
when three monopole VOIs appear at the same time,
the camera agent will autonomously find the closest
monopole VOI to it and follow it. As in the case of
the single VOI case, the camera agents can follow the
multiple VOIs even if they are moving. And, as the
Figure 5: Camera agent when a monopole VOI makes ran-
dom motion. (a) The original distributions; (b) Gradual ag-
gregation of the camera agents toward the monopole VOI;
(c) A part of the camera agents successfully follow the
monopole VOI.
Figure 6: Camera agent when a dipole VOI is fixed. (a)
The original distributions. (b) The agents are attracted to
the dipole VOI from a specific direction.
position of the monopole VOI changes, the camera
agent can always choose to change the target to fol-
low, tracking a closer VOI.
The final test shown is Fig. 9 in which a monopole
VOI and a dipole VOI are present at the same time,
the camera agents still find the closest VOI and tracks
them autonomously.
Agent Based In-Situ Visualization by Guide Field
337

Figure 7: The camera agent when a dipole VOI does ran-
dom motion. (a) The original distributions. (b) The camera
agents converge near the dipole VOI from a specified di-
rection. (c) The camera agents are aggregated in a suitable
position, or the “pole”, to observe the VOI from a proper
viewing direction. (d) The agents continue to follow the
VOI in motion.
4 CONCLUSIONS
We propose an agent based visualization approach
to in-situ visualization for computer simulations. In
this method, camera agents in a “camera swarm”
communicate with each other and with the environ-
ment through a vector field, Visualization Guide Field
(VGF).
The volume of interest (VOI) that should be ap-
plied intensive visualization is a source of VGF in our
method. Inspired by the static electric field, a VOI
that should be a focus of intensive visualization is a
positively changed object and a visualization camera
is a negatively charged object. The camera is a mov-
able entity and called camera agent.
VOI can be either monopole-type or dipole-type.
The monopole-type VOI corresponds to a local region
where in-situ visualization should be applied in close-
up, but from any direciton. The dipole-type VOI cor-
responds to a local region that should be visualized
from a specific angle.
According to the repulsive force between agents,
they can keep a proper distance even if they are at-
tracted to the same VOI.
Our approach will improve the visualization effi-
ciency by allowing camera agents to autonomously
find and track VOI, reducing the number of cameras
Figure 8: Motion of the camera agent when the monopole
VOIs do random motion. (a) shows the original distribu-
tion of monopole VOI and camera agents; (b) shows that
camera agents gradually converge to the nearest monopole
VOI; (c) shows that camera agents will follow the monopole
VOI motion after converging near their respective near-
est monopole VOI. The colors of the camera agents are
set randomly to facilitate observation, and different cam-
era agents will select the closer monopole VOI for observa-
tion. (d),(e) show that the camera agents may also reselect
the monopole VOI to be observed based on the distance af-
ter the monopole VOI motion produces an intersection. (f)
shows that the camera agents will continue to steadily fol-
low the selected monopole VOI after reselection.
Figure 9: Motion of the camera agent when a monopole
VOI and a dipole VOI are present at the same time. (a)
shows the original distribution of VOIs and camera agents;
(b) shows when camera agents are distributed around each
VOI according to the demand of different VOIs.
set up in the simulated environment and allowing us
to obtain data focused on the region of interest rather
than the background region.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
338

ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI (Grant
Numbers 22H03603, 22K18703).
REFERENCES
Ahrens, J., Jourdain, S., O’Leary, P., Patchett, J., Rogers,
D. H., and Petersen, M. (2014). An Image-Based ap-
proach to extreme scale in situ visualization and anal-
ysis.
Anguelov, D., Dulong, C., Filip, D., Frueh, C., Lafon,
S., Lyon, R., Ogale, A., Vincent, L., and Weaver, J.
(2010). Google street view: Capturing the world at
street level. Computer, 43(6):32–38.
Beni, G. and Wang, J. (1993). Swarm intelligence in cel-
lular robotic systems. In Dario, P. and others, editors,
Robots and Biological Systems: Towards a New Bion-
ics?, pages 703–712. Springer-Verlag Berlin Heidel-
berg.
Bennett, J. C., Childs, H., Garth, C., and Hentschel, B.
(2018). In Situ Visualization for Computational Sci-
ence. In Situ Vis. Comput. Sci. Dagstuhl Semin. 18271,
volume 8, pages 1–43.
Childs, H., Ahern, S. D., Ahrens, J., Bauer, A. C., Bennett,
J., Bethel, E. W., Bremer, P.-T., Brugger, E., Cottam,
J., Dorier, M., Dutta, S., Favre, J. M., Fogal, T., Frey,
S., Garth, C., Geveci, B., Godoy, W. F., Hansen, C. D.,
Harrison, C., Hentschel, B., Insley, J., Johnson, C. R.,
Klasky, S., Knoll, A., Kress, J., Larsen, M., Lofstead,
J., Ma, K.-L., Malakar, P., Meredith, J., Moreland, K.,
Navr
´
atil, P., O’Leary, P., Parashar, M., Pascucci, V.,
Patchett, J., Peterka, T., Petruzza, S., Podhorszki, N.,
Pugmire, D., Rasquin, M., Rizzi, S., Rogers, D. H.,
Sane, S., Sauer, F., Sisneros, R., Shen, H.-W., Usher,
W., Vickery, R., Vishwanath, V., Wald, I., Wang, R.,
Weber, G. H., Whitlock, B., Wolf, M., Yu, H., and
Ziegeler, S. B. (2020). A terminology for in situ visu-
alization and analysis systems. Int. J. High Perform.
Comput. Appl., 34(6):676–691.
Childs, H., Bennett, J. C., and Garth, C., editors (2022).
In Situ Visualization for Computational Science.
Springer International Publishing.
Demarle, D. E. and Bauer, A. (2021). In Situ Visualization
with Temporal Caching. Comput. Sci. Eng., 23:25–33.
Deneubourg, J.-L., Aron, S., Goss, S., and Pasteels, J. M.
(1990). The self-organizing exploratory pattern of the
argentine ant. J. Insect Behav., 3(2):159–168.
Dorigo, M. and Blum, C. (2005). Ant colony optimization
theory: A survey. Theor. Comput. Sci., 344(2-3):243–
278.
Grignard, A. and Drogoul, A. (2017). Agent-Based vi-
sualization: A Real-Time visualization tool applied
both to data and simulation outputs. In The AAAI-17
Workshop on Human-Machine Collaborative Learn-
ing, pages 670–675.
Kageyama, A. and Sakamoto, N. (2020). 4D street view: a
video-based visualization method. PeerJ Comput Sci,
6:e305.
Kageyama, A., Sakamoto, N., Miura, H., and Ohno, N.
(2020). Interactive exploration of the In-Situ vi-
sualization of a magnetohydrodynamic simulation.
Plasma and Fusion Research, 15:1401065–1401065.
Kageyama, A. and Yamada, T. (2014). An approach to ex-
ascale visualization: Interactive viewing of in-situ vi-
sualization. Comput. Phys. Commun., 185(1):79–85.
Kawamura, T., Noda, T., and Idomura, Y. (2016). In-situ
visual exploration of multivariate volume data based
on particle based volume rendering. In 2nd Work. Situ
Infrastructures Enabling Extrem. Anal. Vis., pages 18–
22.
O’Leary, P., Ahrens, J., Jourdain, S., Wittenburg, S.,
Rogers, D. H., and Petersen, M. (2016). Cin-
ema image-based in situ analysis and visualization of
MPAS-ocean simulations. Parallel Comput., 55:43–
48.
Tikhonova, A., Correa, C. D., and Kwan-Liu, M. (2010a).
Explorable images for visualizing volume data. Proc.
IEEE Pacific Vis. Symp. 2010, PacificVis 2010, pages
177–184.
Tikhonova, A., Correa, C. D., and Ma, K. L. (2010b). Vi-
sualization by proxy: A novel framework for deferred
interaction with volume data. IEEE Trans. Vis. Com-
put. Graph., 16(6):1551–1559.
Tisue, S. and Wilensky, U. (2004). NetLogo: Design
and implementation of a multi-agent modeling envi-
ronment. In Proceedings of the Agent 2004 Confer-
ence on Social Dynamics: Interaction, Reflexivity and
Emergence.
Wang, Y., Ohno, N., and Kageyama, A. (2023). In situ vi-
sualization inspired by ant colony formation. Plasma
and Fusion Research, 18:2401045.
Wang, Y., Sakai, R., and Kageyama, A. (2022). Toward
agent-based in situ visualization. In By, C. and Choi,
C., editors, Methods and Applications for Modeling
and Simulation of Complex Systems. CCIS, 1636.
Wilensky, U. and Rand, W. (2015). An Introduction to
Agent-Based Modeling: Modeling Natural, Social,
and Engineered Complex Systems with NetLogo. MIT
Press.
Ye, Y., Miller, R., and Ma, K.-L. (2013). In situ pathtube
visualization with explorable images. In 13th Euro-
graphics Symp. Parallel Graph. Vis., pages 9–16. Eu-
rographics Association.
Agent Based In-Situ Visualization by Guide Field
339
