
A Concept for Optimizing Motor Control Parameters Using Bayesian
Optimization
Henning Cui
1 a
, Markus G
¨
orlich-Bucher
1 b
, Lukas Rosenbauer
2
, J
¨
org H
¨
ahner
1 c
and Daniel Gerber
2
1
Organic Computing Group, University of Augsburg, Am Technologiezentrum 8, 86159 Augsburg, Germany
2
BSH Hausger
¨
ate GmbH, Im Gewerbepark B35, 93059 Regensburg, Germany
Keywords:
Bayesian Optimization, DC-Motor, Motor Control, Multiple-Objective, NSGA-II.
Abstract:
Electrical motors need specific parametrizations to run in highly specialized use cases. However, finding such
parametrizations may need a lot of time and expert knowledge. Furthermore, the task gets more complex as
multiple optimization goals interplay. Thus, we propose a novel approach using Bayesian Optimization to find
optimal configuration parameters for an electric motor. In addition, a multi-objective problem is present as two
different and competing objectives must be optimized. At first, the motor must reach a desired revolution per
minute as fast as possible. Afterwards, it must be able to continue running without fluctuating currents. For
this task, we utilize Bayesian Optimization to optimize parameters. In addition, the evolutionary algorithm
NSGA-II is used for the multi-objective setting, as NSGA-II is able to find an optimal pareto front. Our
approach is evaluated using three different motors mounted to a test bench. Depending on the motor, we are
able to find good parameters in about 60-100%.
1 INTRODUCTION
Many new trends, such as e-mobility, highly rely on
advanced electrical machines. This is also the case for
many everyday devices such as washing machines.
These modern electrical machines rely on com-
plex motor control algorithms and software. Further-
more, motors are usually fine-tuned by an electrical
engineer with years of experience in motor develop-
ment. Such optimization can be important, as choos-
ing wrong parameters may lead to time loss, a failure
to run the motor correctly, or even damage it. This,
however, is a complex task as many different param-
eters interplay in a wide range. In addition, finding
good parameters require highly specific expert knowl-
edge, which can be very expensive. Furthermore,
such expert knowledge might not even be available
considering older machines. It is also possible that
such expert knowledge does not lead to the best per-
formances. Due to different influences like the en-
vironment, load or wear, an optimal configuration of
a system might change or must even be reconfigured
a
https://orcid.org/0000-0001-5483-5079
b
https://orcid.org/0000-0002-2036-0308
c
https://orcid.org/0000-0003-0107-264X
during runtime.
For that reason, we present a novel approach for
optimizing the parametrization of different electrical
motors given two competing goals. The first goal is
for the motor to achieve a predefined revolutions per
minute (RPM) as fast as possible. Afterwards, the
second objective is for the motor to maintain the RPM
with as little fluctuation in its current ripple as possi-
ble. A very fast start may lead to a motor running
unstable after reaching its RPM, as its parametriza-
tion is only optimized for a fast startup. Hence, the
parametrization for maintaining the RPM may not be
optimal which could lead to a higher energy consump-
tion.
For our methodology, we utilize Bayesian Opti-
mization (Mockus, 2012) to optimize the parametriza-
tion. As for multiple, competing objectives, the evolu-
tionary algorithm NSGA-II (Deb et al., 2002) is used.
Following, in Section 2, we give a brief overview
of existing related work. We explain our used mo-
tor test bed in Section 3 before outlining the overall
problem in Section 4. Afterwards, we provide a brief
introduction to Bayesian Optimization in Section 5.
Finally, we evaluate our approach in Section 6 before
concluding with an outlook on possible future work
in Section 7.
Cui, H., Görlich-Bucher, M., Rosenbauer, L., Hähner, J. and Gerber, D.
A Concept for Optimizing Motor Control Parameters Using Bayesian Optimization.
DOI: 10.5220/0012093700003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 107-114
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
107
2 RELATED WORK
Various relevant previous work on using Bayesian
Optimization for different kinds of machinery ex-
ists. Notable examples focus on optimizing the be-
haviour of robots, e.g. (Akrour et al., 2017). These
approaches, however, vary from our concept such that
we focus solely on configuring and optimizing param-
eters that need to be set in order to able to use the mo-
tor, instead of optimizing the behaviour of a complex
machinery as whole.
The authors of (Khosravi et al., 2021) tune a motor
with the Bayesian optimizer as well. However, they
focus on optimizing industrialized brushless motors.
We on the other hand utilize DC-motors, a completely
different kinds of motor, and consider the whole con-
trol scheme as a black box which they do not.
Another work from Neumann-Brosig et
al. (Neumann-Brosig et al., 2020) uses Bayesian
Optimization in an industrial setting. They optimize
parameters for a throttle valve control. While the
throttle valve control contains a DC motor, they do
not directly optimize motor parameters. Instead,
their motor is only indirectly influenced by their
parametrization by factors like the voltage input.
K
¨
onig et al. (K
¨
onig et al., 2021) utilizes Bayesian
Optimization to find optimal motor parameters, too.
However, we differ from their work as they based
their work on an AC motor while we utilize a DC mo-
tor. Furthermore, they do not aim to optimize speed
and voltage fluctuation but to maximize tracking ac-
curacy.
Other noteworthy works focus on automatically
improving motors with various other methods. Na-
ture inspired swarm algorithms like the artificial bee
colony algorithm or the flower pollination algorithm
can be used to tune parameters, as was done in (Tar-
czewski and Grzesiak, 2018). Alternatively, the par-
ticle swarm optimization algorithm can be used, too,
as was done by (Sharma et al., 2022) or (Naidu Kom-
mula and Reddy Kota, 2022). Other metaheuristics
can be used too, like the grey wolf optimizer (Kamin-
ski, 2020). It is also possible to use specialized opti-
mization algorithms, like an adaptive safe experimen-
tation dynamics method (Ghazali et al., 2022).
3 TEST BED
In the following, we introduce our test environment
now to better understand the optimization problems
we are going to introduce in the next Section 4. Our
test bed contains different hardware objects, each per-
forming one or multiple functionalities. An abstracted
PC (1)
Dynamometer \
Controller (3)
Inverter \
Motor Control (4)
Oscilloscope (2) Power Supply (5)
DC-Motor (6)
Figure 1: An abstracted overview of the test bed.
view of our setup can be seen in Figure 1. The com-
puter is a standard desktop PC on which our software
and optimizer runs. It is connected to an oscilloscope,
an inverter, a power supply for the inverter and motor
as well as a dynamometer and its controller.
The oscilloscope measures the current ripple for a
sampling rate f
s
. This is important as we need this
information for the second objective defined in Sec-
tion 4.
The inverter is build with a motor control unit and
controls the DC-motor driven by the direct current
(DC) as well as the power supplied to it. Thus, the
inverter handles the angular acceleration as well. It
receives a set of parameters from the PC to indirectly
control the speed up of the motor by changing the fre-
quency of power supplied. Another utility is setting
the desired RPM as well as starting and stopping the
motor.
The motor control tool is powered by the power
supply.
Another hardware object is the dynamome-
ter (Magtrol Inc., 2022b) and its controller (Magtrol
Inc., 2022a). They are used to accurately read out the
RPM.
At last, we tested our setup on three different mo-
tors. We use electric motors which are driven by an
direct current build for household appliances. Mo-
tor 2 and 3 have a smaller or larger axial impeller to
simulate a load. Thereby we have a more realistic,
real world motor setting. The first motor on the other
hand does not utilize an axial impeller. The motors
itself are connected to the oscilloscope, inverter and
dynanometer to read out useful information for the
optimization process.
4 PROBLEM DESCRIPTION
In our work, we consider two different problem
descriptions. Both problems have in common that we
want to optimize 11 parameters in a specific interval.
They control the behaviour of motors such as the
angular acceleration which defines how fast the motor
speeds up, its current ripple, etc.. As we assume no
further expert knowledge about these parameters—
with the system as a whole being seen as a black-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
108

box—we do not discuss the parameters in more
detail.
4.0.1 Optimization Problem 1
Our first optimization problem is single objective
where we only consider the angular acceleration of
the motor. The goal is to reach a fixed rounds
per minute (RPM) as fast as possible. Let p =
{
p
1
, . . . , p
11
}
and t
τ
(p) be the time it takes for the
motor to reach the desired RPM given a set of param-
eters with p ∈ X and X ⊂ R
n
. Then our fitness value
f
1
is the defined time:
f
1
(p) = t
τ
(p) (1)
This leads us to the following optimization problem:
min
p∈X
f
1
(p) (2)
4.0.2 Optimization Problem 2
The next use case we consider is a biobjective opti-
mization problem. At first, the motor should acceler-
ate as fast as possible. Furthermore, after it reaches its
desired angular speed, the current ripple (CR) should
be as consistent as possible. As the motor runs, it re-
quires continuous power due to frictions, resistances,
loads, etc. to keep its RPM. With an inconsistent CR,
multiple problems might occur such as the motor fail-
ing to keep spinning or a decrease of efficiency due to
the excessive energy being dissipated in the form of
heat. Thus, the lifespan of a motor is shortened, too
Thus, we extend our fitness function from Equa-
tion 1. Let I
t
(p) be the current ripple of timestep t
given parameters p and I =
{
I
1
, . . . , I
t
}
. Furthermore,
Var(X) is the variance of a random variable X. Then,
our second fitness function f
2
is defined as follows:
f
2
(p) = Var (I (p)) (3)
Thus, we extend our optimization problem from
Equation 2:
min
p∈X
( f
1
(p), f
2
(p)) (4)
5 BAYESIAN OPTIMIZATION
Bayesian Optimization (BO) is a global optimization
method (Mockus, 2012). As is seen in Section 3, we
have a hardware in the loop system consisting of a
motor, its controlling mechanism and a RPM mea-
surement system. Furthermore, the system is seen
as a black-box. BO is a good choice for our setting,
as Jones et al. (Jones et al., 1998) describes BO as a
good black-box optimizer, as no prior insight about
the fitness landscape is needed. Additionally, BO is
even able to find a global optimum in the presence of
stochastic noise (Mockus, 2012)—which occurs with
our use case. At last, there is still the issue that one
evaluation could take several minutes. While BO is
not able to fix this problem, the optimization algo-
rithm is able to handle the limitation of a costly eval-
uation function well (Brochu et al., 2009).
5.1 Introduction to Bayesian
Optimization
In Bayesian Optimization, we try find a global max-
imizer (or minimizer) of an unknown objective func-
tion f . This optimum is found by utilizing every value
of previous evaluation points. For this task, BO needs
a prior which describes the objective function f for
now. In this context of BO, the prior is a function
which describes the beliefs about the behaviour of
the unknown function. Furthermore, an acquisition
function is needed which decides the next sampling
point (Jones, 2001; Snoek et al., 2012).
5.1.1 Gaussian Process Prior
To describe our searched-for function f , BO creates a
Gaussian process (GP) from which a distribution over
functions is derived. Such a distribution over func-
tions means that we do not calculate a single scalar
output for a given input. Instead, we get the mean and
variance of a normal distribution describing possible
values for a given input (Frazier, 2018). By utilizing
a distribution of functions, GP is able to express un-
certainties. As a result of this trade off, BO is able
to optimize the objective function with fewer evalua-
tions needed (Shahriari et al., 2016).
To utilize a GP, a kernel function is needed as
well. The kernel describes the correlation between
two points in the input space. In our implementation,
we utilize the Mat
´
ern covariance function k
M
(Ras-
mussen, 2003) as a kernel function as it shows prefer-
able properties, like being able to model physical pro-
cesses well (Rasmussen, 2003; Shahriari et al., 2016).
5.1.2 Acquisition Function
The acquisition function α (·) is another important
part of BO as it determines which data point to ob-
serve next. The main idea is to choose a point based
on a high uncertainty of the GP function or where the
objective function has a potentially high value.
However, choosing the right acquisition function
is no trivial task and requires a lot of evaluation.
Thus, we adopt scikit-learns (Buitinck et al., 2013)
A Concept for Optimizing Motor Control Parameters Using Bayesian Optimization
109

strategy of utilizing three different acquisition func-
tions: Probability of Improvement (Kushner, 1964),
Expected Improvement (Mockus, 1975) and Upper
Confidence Bound (Cox and John, 1992). They op-
timise each acquisition function independently and
at each step all three functions propose an candidate
point. The next observation point is then chosen prob-
abilistically by choosing the point with the highest
gain.
To better visualize the concept of BO, we exem-
plified this concept in Figure 2. It shows an example
of BO on an 1D objective function, calculated over
4 iterations. Each sub-figure is partitioned into two.
The top image shows the true objective function f
(red line), the Gaussian process model (green area)
and its estimation of f (green dashed line). Further-
more, it shows new (magenta points) and old obser-
vation points (dark green) if existing. The bottom fig-
ure shows the correlating acquisition function f
a
(blue
line) and the next point to sample (blue ’x’). Figure 2a
shows step 0 after its initialization. We sampled 5 ran-
dom points to create our GP as well as α (·). Now, we
choose our next sampling point. The next Figure 2b
shows the observed sampling point as well as an up-
dated GP model and acquisition function. We then
repeat these steps multiple times to find the global op-
timum.
For a more indepth view of BO, we refer to the
works of Brochu et al. (Brochu et al., 2009), Shahriari
et al. (Shahriari et al., 2016) and Mockus (Mockus,
2012).
5.2 Multi-Objective Bayesian
Optimization
As is described in section 3, another goal is to opti-
mize multiple objectives. New challenges arise with
a multi-objective as we have to find the Pareto Set
which is a set of solutions where all objectives are
optimized as effectively as possible. That means that,
for each solution, each objective cannot be improved
without worsening another objective (Ngatchou et al.,
2005). These goals may be conflicting though which
means that both objectives may not be optimal simul-
taneously given one parameter set (Ehrgott, 2005). In
our context, it is possible to have a very fast startup
time which, however, leads to an unstable motor. The
current may be fluctuating highly which is not desir-
able. A slower startup time may take a while but it
could lead to a higher current ripple. Here, the goal is
to find parameters which satisfy both objectives.
Nevertheless, a pure BO is not able to optimize
multiple objectives. Because of that, we utilize a
multi-objective Bayesian Optimization algorithm in-
troduced by Galuzio et al. (Galuzio et al., 2020).
Given two objective functions f
1
(x) and f
2
(x) and a
sampling point x. We now try to satisfy both objec-
tives:
x
∗
= arg min
x∈X
( f
1
(x), f
2
(x)) (5)
Regarding the multi-objective Bayesian optimizer,
the main idea of BO is maintained. The whole func-
tionality and its approach of GP, its kernel function as
well as an acquisition function is still the same as is
described in Section 5.1. However, each objective is
now approximated by an individual GP.
The acquisition function changes for this context,
as a new observation point must be sampled from the
Pareto front. However, the Pareto front is unknown
and must be approximated by estimating all objective
functions subject to the input space. This approxi-
mation is done by the non-dominated sorting genetic
algorithm II (NSGA-II) (Deb et al., 2002). Now, a
new observation point can be sampled from the ap-
proximated Pareto front. This new data point can now
be evaluated by each individual GP and the solution
can be used to improve NSGA-IIs approximation of
the Pareto front, further increasing the quality of each
sampling point.
For a more detailed description of the multi-
objective Bayesian optimizer, we refer to (Galuzio
et al., 2020).
6 EVALUATION
With the fundamental preliminaries done, this section
presents our results. The BO always ran for 700 eval-
uations, given 10 initial sampling points. For each
run, the motor sped up to a final RPM of 1500.
Furthermore, we utilize the Bayesian comparison
of classifiers (BC) introduced by Benavoli et al. (Be-
navoli et al., 2017) to compare our found parameters
with random ones. The advantage here is that we do
not need to arbitrarily sample until we succeed at sat-
isfying our significance threshold. We state three dif-
ferent probabilities: p
r
, p
e
and p
BO
. These values in-
dicate different probability values with p
r
stating the
probability that the random parameters are better. p
BO
presents the probability that the parameters found by
BO are better. At last, p
e
expresses the probability
that the differences are within the region of practical
equivalence (rope). This means that, when the differ-
ence between two output values are smaller that the
rope, both outputs can be seen as equal. Here, we use
a rope of 0.5, which means that a difference of 0.5
seconds for the motor speed up time is treated as be-
ing equal and not statistically significant. The reason-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
110
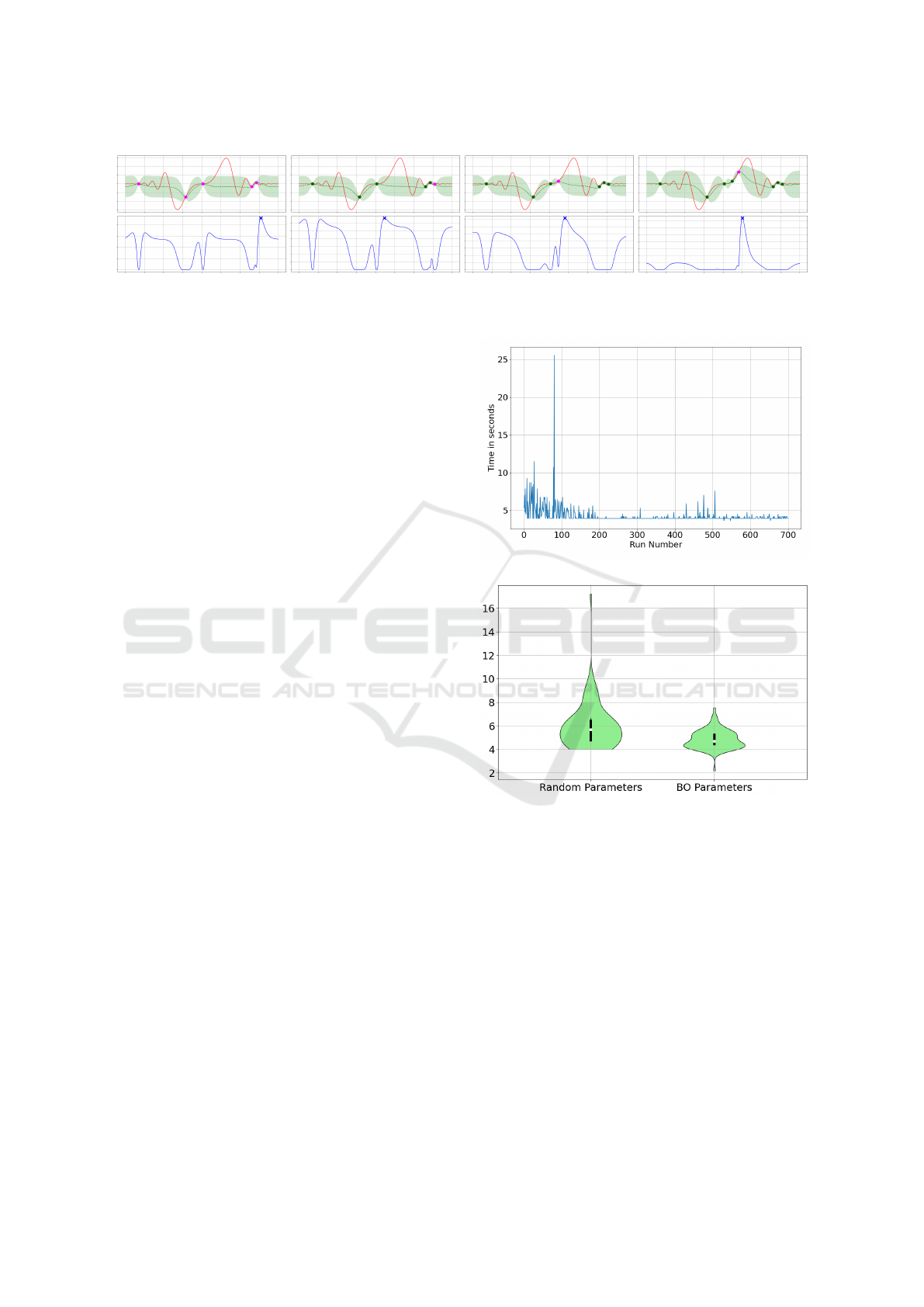
(a) Step 0. (b) Step 1. (c) Step 2. (d) Step 3.
Figure 2: An example of BO on an 1D objective function over 4 iterations.
ing here is that real-world motors are seldom perfect
systems. Due to friction, capacitor charges, etc. a lot
of inconsistency might occur. Thus, we chose a rela-
tively high rope to keep such inconsistencies in mind.
For the second objective, the motor ran for an ad-
ditional 10 seconds after speed up to measure the cur-
rent.
6.1 Single Objective
At first, we focus on the angular acceleration. We
show the optimization progress as well as an empir-
ical comparison between random parameters and the
optimized one. For the last task, we compare 50 runs
each for statistical significance.
The plain motor should be the simplest one to op-
timize as it does not include an axial impeller. The
other two motors should be more difficult due to their
axial impeller.
As we can see in Figure 3a, the plain motor starts
with a high variance in time. Nonetheless, as op-
timization progresses, BO is able to find good pa-
rameters. As for motor 2, we see a completely dif-
ferent history in Figure 4. There is a higher vari-
ance throughout the optimization progress with some
lower peaks. Thus one has to be critical of this op-
timization progress as there are high peaks through-
out the observations. For the last motor 3, the opti-
mization progress looks more promising in Figure 5a
compared to the second motor. It is able to periodi-
cally find good values and we see a better optimiza-
tion progress.
An empirical comparison for the motors between
the best parameters found and random ones can be
seen in violin plots in Figure 3b, 4b and 5b. Here,
we compare the startup times between random pa-
rameters and the best parameters found by BO. We
can see that the random parameters take between 4
and > 10 seconds to speed up and most of the runs
take about ∼ 6 seconds for all motors. The optimized
parameters take on average between 4 and 5 seconds
but show a relatively high variance, too. Neverthe-
less, the variances of BO parameters are still lower
than random ones. Furthermore, it can be said that the
(a) Progression of BO.
(b) Random vs. best parameter found.
Figure 3: Progression of BO and an empirical comparison
given the plain motor.
optimized parameters behave better than the random
ones as they show a higher axial acceleration on av-
erage. This can be somewhat confirmed by utilizing
BC. For the plain motor, the results are p
r
< 0.001,
p
e
= 0.407 and p
BO
= 0.591. This shows us that our
found parameters are statistically better for about 59
percent of runs. However, these parameter sets are
statistically equal for about 41 percent. Motor 2 has
p
r
< 0.001, p
e
= 0.002 and p
BO
= 0.998. On aver-
age, the best parameters found should be better than
random parameters. At last, motor 3 has a similar
behaviour. Here we get p
r
= 0.001, p
e
= 0.320 and
p
BO
= 0.680. This tells us that both random parame-
ters and our BO parameters are statistically equal for
A Concept for Optimizing Motor Control Parameters Using Bayesian Optimization
111
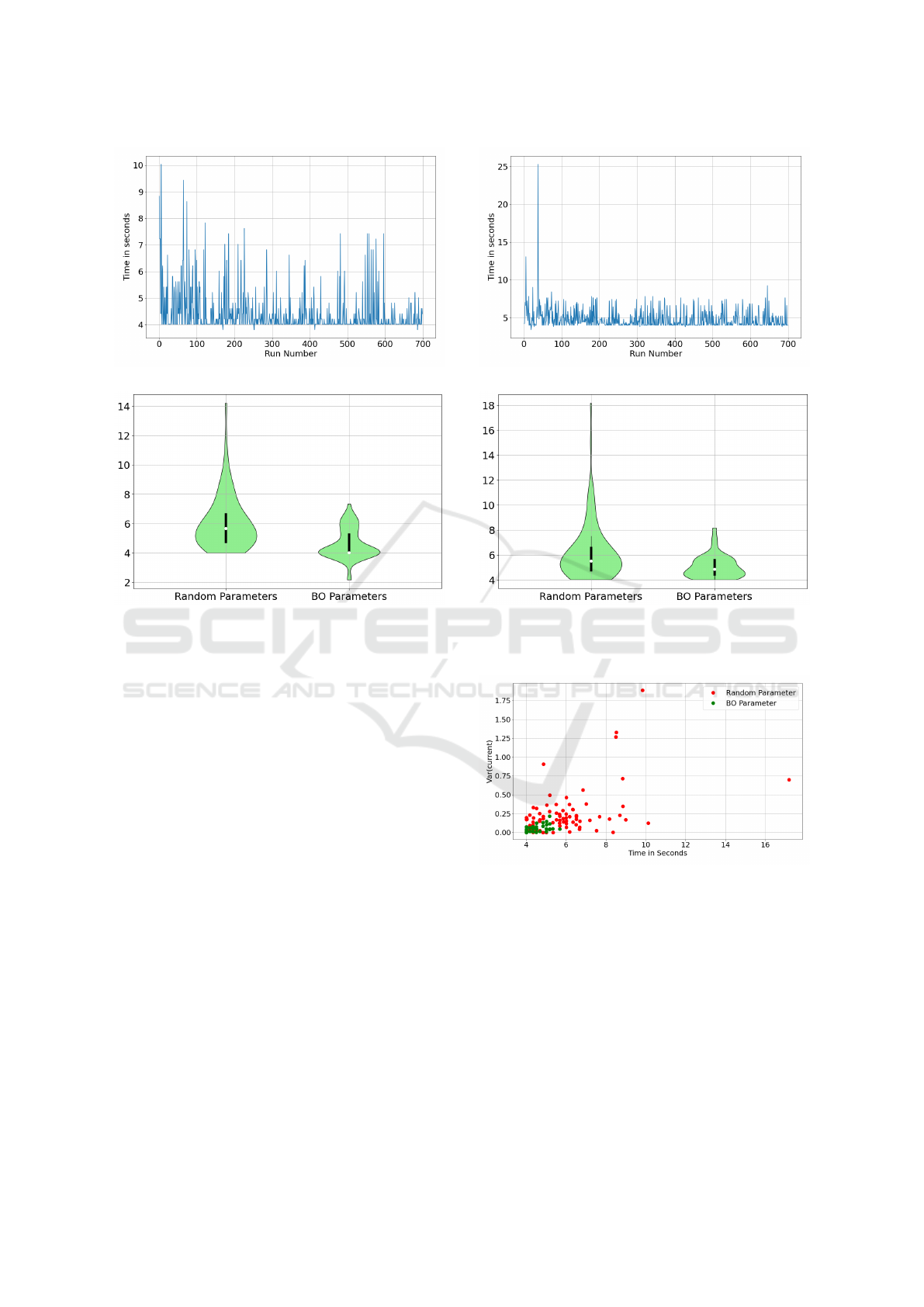
(a) Progression of BO.
(b) Random vs. best parameter found.
Figure 4: Progression of BO and an empirical comparison
given motor 2.
32 percent but statistically better for 68 percent.
6.2 Multi-Objective
At last, we try to optimize a multi-objective task de-
fined in Section 4. Here, we figuratively compare the
best parameter to random ones. For each compari-
son, we took 80 samples each and show a distribution
for Time in Seconds and Var(current). Furthermore,
we utilize the Hypervolume indicator (Zitzler et al.,
2008) to quantitatively compare our result.
6.2.1 Figurative Comparison
Looking at the plots in Figure 6, 7 and 8 for all three
motors, we see distributions of observations. They
contain data points from random parameters and the
parameters of the best solution found by the multi-
objective BO.
The coordinate system shows the variance of the
current ripple as well as the time it takes to speed up
in seconds. Green dots represent parameters found by
BO while red ones represent random ones. A lower
distance to the origin indicates a better parameter. We
can see that the random parameters are more scattered
(a) Progression of BO.
(b) Random vs. best parameter found.
Figure 5: Progression of BO and an empirical comparison
given motor 3.
Figure 6: Plain Motor: optimal parameter compared to ran-
dom ones. Lower distances to the origin are better.
throughout the coordinate system, indicating a high
variation. As for the plain motor and motor 2, we
see that the parameters found by the BO are more fo-
cused at the origin, indicating that those are superior
compared to the random parameter. However, Fig-
ure 6 still shows a slight variation for the BO parame-
ters which implies inconsistencies to some degree be-
tween each run.
As for motor 3, its evaluation results are more of
an outlier as is visualized in Figure 8. We see data
points of both the random and best parameters found
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
112

Figure 7: Motor 2: optimal parameter compared to random
ones. Lower distances to the origin are better.
Figure 8: Motor 3: optimal parameter compared to random
ones. Lower distances to the origin are better.
scattered throughout the coordinate system. Given the
BO parameters, we can see that the runs are highly
inconsistent. Thus, it is likely that it is not possible to
optimize parameters for this specific setting.
6.2.2 Hypervolume Indicator
At last, we compare the found Pareto front with a
Pareto front generated from random search (RS). For
this comparison, we utilize the Hypervolume indica-
tor. Here, we calculate the volume bound by a ref-
erence point and the Pareto set containing all found
solutions. For the reference point, we choose a point
a little bit larger than the largest value found in both
axes as is recommended in (Beume et al., 2007).
Here, the greater the volume, the better the Pareto
front as a greater volume indicates a Pareto front
which is closer to the origin.
Our results can be seen in Table 1. We see that the
multi-objective BO finds better results for the plain
motor as well as motor 2 compared to a RS. How-
ever, motor 3 shows dissimilar results as the RS out-
performs the multi-objective BO here. Nevertheless,
the difference is only marginal and it can be argued
that both Pareto sets are equally good.
Table 1: Hypervolume indicators for each motor and Pareto
front.
Pareto Front Plain Motor Motor 2 Motor 3
Found by BO 42.68 35.31 94.19
Found by RS 40.93 33.84 94.27
7 CONCLUSION
Throughout our work we performed the first steps into
automating this process. We provide insight into a
possible hardware test bed and how it may be con-
trolled. Our key contribution is development of an
optimization routine based on Bayesian Optimization
(BO) which calibrates up to two motor properties in
parallel.
Our evaluation shows mixed results. Generally,
there is a trend towards a highly inconsistent setting,
as the same parameter can create different evaluation
values. Thus, the fluctuating results demonstrate a
complex objective for the BO. However, BO is able
to find good parameters most of the time and we are
able to successfully statistically compare our results
to random ones most of the times.
For future work, other acquisition functions as
well as kernels for the GP function might result in
better products. When adjusted to our problem do-
main to consider the non-deterministic nature of the
motors, Bayesian Optimization might be able to pro-
duce better results.
ACKNOWLEDGEMENTS
The authors would like to thank Tomas Hrubov-
cak, Martin Gula and Slavomir Maciboba from BSH
Drives and Pumps s.r.o. in Michalovce, Slovakia.
Their numerous and detailed help made a functioning
testbed possible.
REFERENCES
Akrour, R., Sorokin, D., Peters, J., and Neumann, G.
(2017). Local bayesian optimization of motor skills.
In International Conference on Machine Learning,
pages 41–50. PMLR.
Benavoli, A., Corani, G., Dem
ˇ
sar, J., and Zaffalon, M.
(2017). Time for a change: a tutorial for compar-
ing multiple classifiers through bayesian analysis. The
Journal of Machine Learning Research, 18(1):2653–
2688.
Beume, N., Naujoks, B., and Emmerich, M. (2007). Sms-
emoa: Multiobjective selection based on dominated
A Concept for Optimizing Motor Control Parameters Using Bayesian Optimization
113

hypervolume. European Journal of Operational Re-
search, 181(3):1653–1669.
Brochu, E., Cora, V. M., and de Freitas, N. (2009). A tuto-
rial on bayesian optimization of expensive cost func-
tions, with application to active user modeling and hi-
erarchical reinforcement learning. Technical Report
UBC TR-2009-023 and arXiv:1012.2599, University
of British Columbia, Department of Computer Sci-
ence. http://arxiv.org/abs/1012.2599/.
Buitinck, L., Louppe, G., Blondel, M., Pedregosa, F.,
Mueller, A., Grisel, O., Niculae, V., Prettenhofer, P.,
Gramfort, A., Grobler, J., Layton, R., VanderPlas, J.,
Joly, A., Holt, B., and Varoquaux, G. (2013). API de-
sign for machine learning software: experiences from
the scikit-learn project. In ECML PKDD Workshop:
Languages for Data Mining and Machine Learning,
pages 108–122.
Cox, D. D. and John, S. (1992). A statistical method for
global optimization. In [Proceedings] 1992 IEEE In-
ternational Conference on Systems, Man, and Cyber-
netics, pages 1241–1246. IEEE.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. IEEE Transactions on Evolutionary Compu-
tation, 6(2):182–197.
Ehrgott, M. (2005). Multicriteria optimization, volume 491.
Springer Science & Business Media.
Frazier, P. I. (2018). A tutorial on bayesian optimization.
https://arxiv.org/abs/1807.02811/.
Galuzio, P. P., de Vasconcelos Segundo, E. H., dos San-
tos Coelho, L., and Mariani, V. C. (2020). Mobopt
— multi-objective bayesian optimization. SoftwareX,
12:100520.
Ghazali, M. R., Ahmad, M. A., Suid, M. H., and Tumari, M.
Z. M. (2022). A dc/dc buck-boost converter-inverter-
dc motor control based on model-free pid controller
tuning by adaptive safe experimentation dynamics al-
gorithm. In 2022 57th International Universities
Power Engineering Conference (UPEC), pages 1–6.
Jones, D. R. (2001). A taxonomy of global optimiza-
tion methods based on response surfaces. Journal of
Global Optimization, 21(4):345–383.
Jones, D. R., Schonlau, M., and Welch, W. J. (1998).
Efficient global optimization of expensive black-
box functions. Journal of Global Optimization,
13(4):455–492.
Kaminski, M. (2020). Nature-inspired algorithm imple-
mented for stable radial basis function neural con-
troller of electric drive with induction motor. Ener-
gies, 13(24).
Khosravi, M., Behrunani, V. N., Myszkorowski, P.,
Smith, R. S., Rupenyan, A., and Lygeros, J. (2021).
Performance-driven cascade controller tuning with
bayesian optimization. IEEE Transactions on Indus-
trial Electronics, 69(1):1032–1042.
Kushner, H. J. (1964). A New Method of Locating the
Maximum Point of an Arbitrary Multipeak Curve in
the Presence of Noise. Journal of Basic Engineering,
86(1):97–106.
K
¨
onig, C., Turchetta, M., Lygeros, J., Rupenyan, A., and
Krause, A. (2021). Safe and efficient model-free adap-
tive control via bayesian optimization. In 2021 IEEE
International Conference on Robotics and Automation
(ICRA), pages 9782–9788.
Magtrol Inc. (2022a). Dsp7000 – high speed programmable
controller. https://www.magtrol.com/product/
dsp7000-high-speed-programmable-controller/,
Accessed: 2022-07-15.
Magtrol Inc. (2022b). Hd series – hysteresis dy-
namometers. https://www.magtrol.com/product/
hysteresis-dynamometers-hd-series/, Accessed:
2022-07-15.
Mockus, J. (1975). On bayesian methods for seeking the
extremum. In Marchuk, G. I., editor, Optimization
Techniques IFIP Technical Conference Novosibirsk,
July 1–7, 1974, pages 400–404, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Mockus, J. (2012). Bayesian approach to global optimiza-
tion: theory and applications, volume 37. Springer
Science & Business Media.
Naidu Kommula, B. and Reddy Kota, V. (2022). Design of
mfa-pso based fractional order pid controller for effec-
tive torque controlled bldc motor. Sustainable Energy
Technologies and Assessments, 49:101644.
Neumann-Brosig, M., Marco, A., Schwarzmann, D., and
Trimpe, S. (2020). Data-efficient autotuning with
bayesian optimization: An industrial control study.
IEEE Transactions on Control Systems Technology,
28(3):730–740.
Ngatchou, P., Zarei, A., and El-Sharkawi, A. (2005). Pareto
multi objective optimization. In Proceedings of the
13th International Conference on, Intelligent Systems
Application to Power Systems, pages 84–91.
Rasmussen, C. E. (2003). Gaussian processes in machine
learning. In Summer school on machine learning,
pages 63–71. Springer.
Shahriari, B., Swersky, K., Wang, Z., Adams, R. P., and
de Freitas, N. (2016). Taking the human out of the
loop: A review of bayesian optimization. Proceedings
of the IEEE, 104(1):148–175.
Sharma, A., Sharma, V., and Rahi, O. P. (2022). Pso tuned
pid controller for dc motor speed control. In Suhag,
S., Mahanta, C., and Mishra, S., editors, Control and
Measurement Applications for Smart Grid, pages 79–
89, Singapore. Springer Nature Singapore.
Snoek, J., Larochelle, H., and Adams, R. P. (2012). Practi-
cal bayesian optimization of machine learning algo-
rithms. In Pereira, F., Burges, C., Bottou, L., and
Weinberger, K., editors, Advances in Neural Infor-
mation Processing Systems, volume 25. Curran Asso-
ciates, Inc.
Tarczewski, T. and Grzesiak, L. M. (2018). An applica-
tion of novel nature-inspired optimization algorithms
to auto-tuning state feedback speed controller for
pmsm. IEEE Transactions on Industry Applications,
54(3):2913–2925.
Zitzler, E., Knowles, J., and Thiele, L. (2008). Quality
Assessment of Pareto Set Approximations. Springer
Berlin Heidelberg, Berlin, Heidelberg.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
114
