
Improving Intrusion Detection Systems with Multi-Agent Deep
Reinforcement Learning: Enhanced Centralized and Decentralized
Approaches
Amani Bacha
1
, Farah Barika Ktata
1
and Faten Louati
2
1
MIRACL Laboratory, ISSATSo, Sousse University, Sousse, Tunisia
2
MIRACL Laboratory, FSEGS, Sfax University, Sfax, Tunisia
Keywords:
Multi-Agent Deep Reinforcement Learning (MADRL), Intrusion Detection System (IDS), Deep Q-Network
(DQN), NSL-KDD, MADQN, COCA-MADQN, MADQN-GTN.
Abstract:
Intrusion detection is a crucial task in the field of computer security as it helps protect these systems against
malicious attacks. New techniques have been developed to cope with the increasing complexity of computer
systems and the constantly evolving threats. Multi-agent reinforcement learning (MARL), is an extension of
Reinforcement Learning (RL) in which agents can learn to detect and respond to intrusions while considering
the actions and decisions of the other agents. In this study, we evaluate MARL’s performance in detecting
network intrusions using the NSL-KDD dataset. We propose two approaches, centralized and decentralized,
namely COCA-MADQN and MADQN-GTN. Our approaches show good results in terms of Accuracy, Preci-
sion, Recall, and F1-score.
1 INTRODUCTION
Machine learning (ML) offers several methods for in-
trusion detection, such as supervised, unsupervised,
semi-supervised, and Reinforcement learning (RL)
algorithms (Molina-Coronado et al., 2020). RL was
first formalized by (Sutton et al., 1998) and subse-
quently extended to MARL. MADRL is an extension
of Deep Reinforcement Learning (DRL) that allows
multiple agents to interact and learn from each other
in a shared environment. Hence, the MADRL-IDS
approach possesses the capability to acquire knowl-
edge from past experiences and assimilate novel at-
tack patterns, thereby enhancing its efficacy in de-
tecting and thwarting cyber intrusions (Sethi et al.,
2021). However, MARL approaches have limitations
including scalability, non-stationarity, partial observ-
ability issues. Non-stationarity is a major challenge
in distributed MARL as it can lead to degraded per-
formance or even failure of the learning algorithm.
The latter is caused by the changes in an agent’s pol-
icy during learning and the delay incurred in informa-
tion exchange between agents (Ibrahim et al., 2021).
As for scalability, which is a hurdle in centralized
MARL caused by the huge number of agents or the
complexity of the state and action spaces, the com-
putational complexity of the centralized approach can
become prohibitive, making it difficult to scale up to
larger problems. Moreover, the centralized approach
requires the sharing of all observations with the cen-
tral agent. Communication overhead can also become
a bottleneck in large-scale MARL problems, and the
central agent must process and integrate all the ob-
servations from each agent to make decisions. This
causes a high communication bandwidth (Zhu et al.,
2022). We tackled the mentioned problems by em-
ploying two MADQN- IDS-based approaches: cen-
tralized and decentralized, namely COCA-MADQN
and MADQN-GTN. We evaluated their effectiveness
using the NSL-KDD dataset.
COCA-MADQN (Common observation Common
action-MADQN): This centralized approach elimi-
nates the need for a single central agent to coordi-
nate all actions. All agents have equal access to ob-
servations and can communicate with each other to
determine the best course of action. The decision-
making process is shared among the agents, and the
final action is determined by majority voting. The
shared ReplayBuffer further allows agents to learn
from each other’s experiences, leading to better co-
ordination and overall performance improvement in
cooperative MARL problems.
772
Bacha, A., Ktata, F. and Louati, F.
Improving Intrusion Detection Systems with Multi-Agent Deep Reinforcement Learning: Enhanced Centralized and Decentralized Approaches.
DOI: 10.5220/0012124600003555
In Proceedings of the 20th International Conference on Security and Cryptography (SECRYPT 2023), pages 772-777
ISBN: 978-989-758-666-8; ISSN: 2184-7711
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

MADQN-GTN (MADQN with Global Target Net-
work): Our decentralized approach is inspired by the
concept of Vertical Federated Reinforcement Learn-
ing (VFRL)(Qi et al., 2021). MADQN-GTN utilizes a
global target network (GTN) instead of individual lo-
cal target networks for each DQN agent. This proved
to be more effective since the weights of the GTN are
averaged across all agents, resulting in a more consis-
tent and stable learning process. This approach leads
to faster convergence and better performance in coop-
erative MARL problems.
The remainder of the paper is organized as follows:
Section 2 discusses the essential concepts and back-
ground. Section 3 provides an overview of the re-
lated work on RL and MARL for intrusion detection.
Section 4 describes the proposed approaches in de-
tail. Section 5 presents the experimental results and
analysis. Finally, Section 6 concludes the paper and
outlines possible directions for future research.
2 BACKGROUND
2.1 Markov Decision Process (MDP)
and Markov Game (MG)
MDP and Markov Game are both important concepts
in the field of RL and have numerous applications in
real-world problems including cybersecurity (Nguyen
et al., 2020). According to (Canese et al., 2021), MDP
is a discrete-time stochastic control process involv-
ing a single agent. It consists of a set of states, ac-
tions, transition probabilities between states, and re-
wards associated with each state-action space. MG
extends the concept of MDP to include multiple inter-
acting agents and the environment. However, agents
collaborate or compete to achieve shared or conflict-
ing objectives.
2.2 Reinforcement Learning (RL)
RL algorithms can be broadly categorized into value-
based algorithms and policy-based algorithms. Value-
based methods learn the value function to indirectly
determine the optimal policies (Mnih et al., 2015).
Algorithms like Q-Learning, and DQN are well-
known examples of value-based methods. Policy-
based methods directly optimize the policies them-
selves without the need for a separate value function.
Algorithms like REINFORCE and Proximal Policy
Optimization fall into this category. In addition,
value-based approaches excel in off-policy learning
and discrete action spaces, while policy-based ap-
proaches can handle both discrete and continuous
control and often offer strong performance guaran-
tees (Lee et al., 2022). Actor-Critic (AC) Methods
combine value-based and policy-based approaches.
Notably, the widely used Deep Deterministic Policy
Gradient (DDPG) algorithm employs the Actor-Critic
approach for continuous action-space tasks (Canese
et al., 2021).
3 RELATED WORK
(Lopez-Martin et al., 2022) suggested several exten-
sions and improvements to DQN including double
DQN (DDQN) in Adversarial RL for an intrusion de-
tection field. Likewise, a study in (Nguyen and Reddi,
2021) applied DRL methods such as DQN, Double
DQN, and actor-critic models for network intrusion
detection. It showed that the DRL policy networks
are efficient and responsive, making them suitable for
online learning and quick adaptation in dynamic data
networks. As an extension of DRL, MADRL has be-
come increasingly popular in recent years as it can
solve complex real-world problems that traditional
RL struggled with (Ibrahim et al., 2021). Many sur-
veys, examined MADRL from different perspectives
due to its rising popularity. From a mathematical per-
spective, some literature provided theoretical analyses
of MADRL, namely (Zhang et al., 2021), (Nguyen
et al., 2020). MADRL finds applications in various
domains such as the medical field. Researchers in
(Vlontzos et al., 2019) has introduced an innovative
approach that utilizes cooperative MADRL for detect-
ing multiple landmarks in medical images. However,
few studies explored the use of MADRL in the con-
text of intrusion detection systems. In reference to the
collaborative MARL topic, we consider (Servin and
Kudenko, 2008) paper as a valuable one. It proposes a
distributed model where network sensor agents learn
to communicate signals within a hierarchical struc-
ture. Higher-level agents in the hierarchy interpret
local information from these signals and notify the
network operator of abnormal states when required.
This approach addresses the issue of scalability. (Zhu
et al., 2014) put forth a new approach for adaptive
IDS logic using iterative reinforcement learning and
Multi-armed Bandits (MAB). (Caminero et al., 2019)
and (Suwannalai and Polprasert, 2020) implemented
Adversarial Reinforcement Learning with Deep Q-
network (AR-DQN) which is a technique that com-
bines adversarial learning and DRL to improve the
robustness of an RL agent against adversarial at-
tacks. The authors (Sethi et al., 2021) proposed a
DRL-based IDS that utilized DQN logic across var-
ious distributed network nodes, providing a multi-
Improving Intrusion Detection Systems with Multi-Agent Deep Reinforcement Learning: Enhanced Centralized and Decentralized
Approaches
773
view representation, then they designed and imple-
mented a MADQN equipped with an attention mech-
anism. In this paper, we carefully designed and im-
plemented two MADQN-IDS-based centralized and
decentralized approaches using NSL-KDD. Our ap-
proaches demonstrated their effectiveness in achiev-
ing high-performance metrics such as accuracy, pre-
cision, recall, and F1-score, and they overcome some
of the common challenges associated with IDS, such
as dealing with large volumes of network data and de-
tecting a wide range of attack types. On the whole,
our approaches represent a promising solution for en-
hancing the security of networks and protecting them
against malicious attacks.
4 PROPOSED APPROACH
Since we work in a discrete action-space, we have
opted for multi-agent Deep Q-Network (MADQN)
method. In the context of IDS, MADQN can be used
to train multiple DQN-agents to detect and respond to
different types of attacks to improve the overall secu-
rity of the system. By implementing COCA-MADQN
and MADQN-GTN, we can explore their trade-offs
and benefits in IDS.
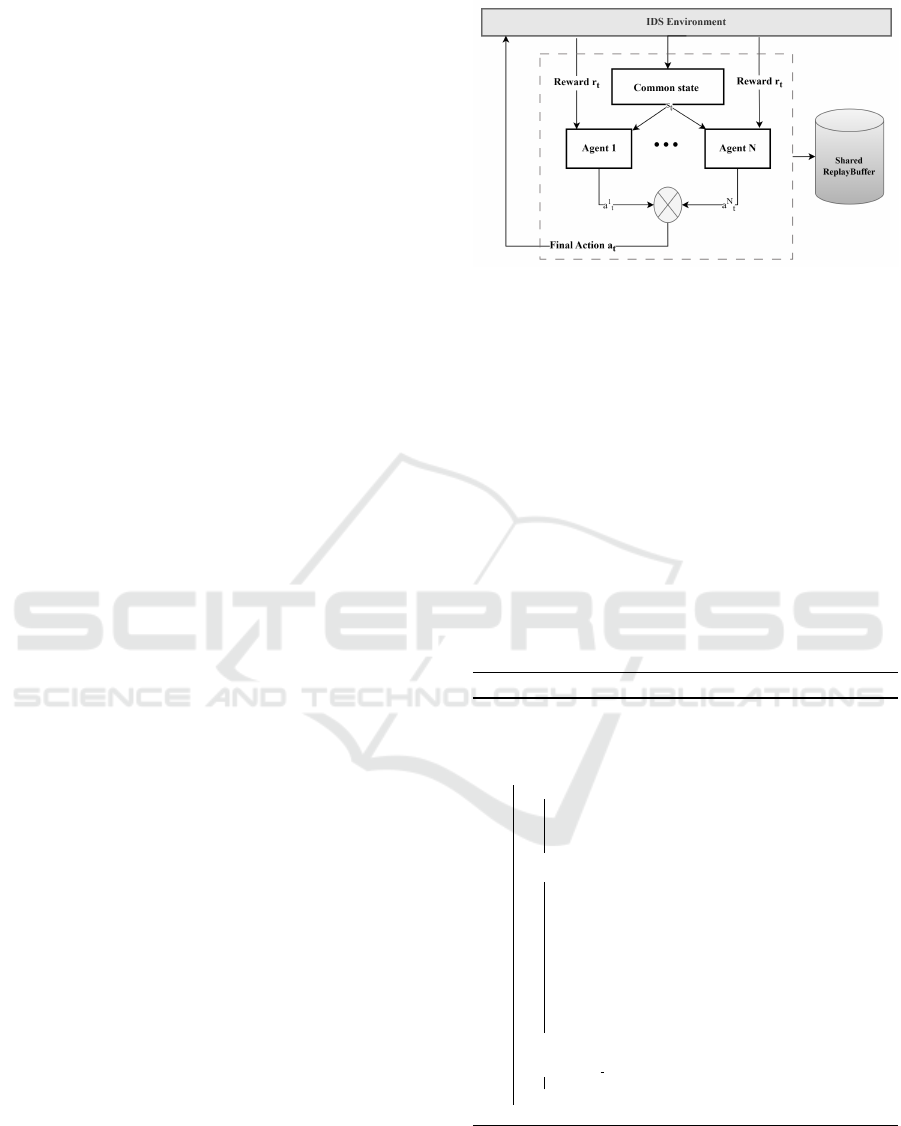
4.1 COCA-MADQN
This approach eliminates the need for a central agent
and instead, it distributes the decision-making pro-
cess among the agents. All agents have equal ac-
cess to observations and can communicate with each
other to determine the best course of action. The fi-
nal action is determined by majority voting. Indeed,
during each episode, agents interact with the envi-
ronment and collect transitions (state, action, reward,
next state). These transitions are stored in a shared
replay buffer. A batch of transitions (b
s
) is randomly
sampled from the replay buffer and used to update the
agents’ neural network parameters (Figure 1).
The use of a shared replay buffer reduces the commu-
nication costs and the loss function. For each agent,
the target network is updated every episode to sta-
bilize action policy formation and provide an esti-
mation of the expected future value for each action.
This estimation is used to update the Q-values asso-
ciated with actions in the prediction network. The
main neural network parameters are optimized using
a cost function that measures the difference between
the main neural network’s predictions and the target
network’s produced values. The use of a target neu-
ral network reduces fluctuations in the main neural
network’s predictions and improves learning stability
Figure 1: COCA-MADQN: Centralized Approach Model.
and performance (Nguyen et al., 2022). The ε-greedy
policy is used to select actions for the agents based
on the main neural network’s prediction. This means
that with probability ε, a random action is selected to
encourage the exploration of the action space, while
with a probability of 1-ε, the optimal action is cho-
sen based on the main neural network’s prediction.
Our approach, COCA-MADQN, involved choosing a
final action through a majority vote process by select-
ing the most commonly predicted action by all agents
and then assigning an average of all rewards. After
that, the state would move to the next state and the
process would be repeated until the training was com-
pleted. We present a detailed algorithm (Algorithm 1)
that outlines the key steps of our approach.
Algorithm 1: COCA-MADQN Algorithm.
Initialize:
Replay buffer D to capacity N
Step counter T = 0
Action-Value Q with random weight θ
Target Action-Value Q
′
with weight θ
−
← θ
repeat
for each agent i do
Receive state s
i
, get Q(s
i
, a, θ)
Choose action a
i
according to ε-greedy policy
Choose final action a by majority voting among all agents
Execute a, get s
′
and reward r
end
for each agent i do
Receive new state s
′
i
Store (s, a
final
, r) in D
Randomly sample minibatch transitions from D
Y =
(
r
i
+ γ max
a
′
i
Q
′
(s
′
i
, a
′
i
, θ
−
) if s
′
is not terminal
r
i
if s
′
is terminal
Update parameters θ using minibatch gradient descent on
(Y − Q(s
i
, a
i
, θ))
2
s
i
← s
′
i
end
T ← T + 1
if T mod max timestep == 0 then
Update target network weight θ
−
← θ
end
until T > T
max
;
4.2 MADQN-GTN
First, we started to implement MADQN with a tar-
get network for each agent, but the results didn’t
SECRYPT 2023 - 20th International Conference on Security and Cryptography
774

lead to satisfactory convergence because of the non-
stationarity. That’s why, we proposed a new approach
MADQN-GTN to overcome this limit. To further
develop our approach, we used a MADQN with a
Global Target Network. This means that we will use
a shared target network for all agents in our system,
which will help stabilize the training process and im-
prove the overall performance of our model. This ap-
proach was influenced by the VFRL (Vertical Feder-
ated Reinforcement Learning) described in (Qi et al.,
2021), where each agent updates its model based on
local observations and periodically sends the aggre-
gated local models to the central server. The up-
dated global model is generated by the central server
and distributed to the agents after being combined
with the local models. Back to our approach, as ex-
plained above, we opted for a shared GTN across all
agents to effectively transfer knowledge and experi-
ence gained by one agent to other agents in the sys-
tem, leading to more efficient and effective learning.
Our approach will involve training multiple DQN-
agents, each agent has its own set of inputs and out-
puts. The MADQN will learn to predict the Q-values
for each agent’s actions based on the current state of
the environment. The agents will then use these Q-
values to select actions that maximize their expected
rewards (Figure 2).
Figure 2: MADQN-GTN: Decentralized Approach Model.
Overall, the use of a MADQN with a Global
Target Network is a powerful and flexible approach
for learning in multi-agent systems to achieve opti-
mal performance in our particular problem domain.
Global Target Network is regularly updated based on
the weights of individual agents. In fact, in our im-
plementation, the weights of the Global Target Net-
work are obtained by averaging the weights of all lo-
cal agents. Our approach is outlined in Algorithm 2,
which provides a detailed breakdown of the crucial
steps involved. Finally, we created a custom IDS en-
vironment with OpenAIGym, a library that enables
the creation of simulation environments for reinforce-
ment learning. We opted for a preprocessed and over-
sampled NSL-KDD which is a benchmark dataset that
Algorithm 2: MADQN-GTN Algorithm.
for each agent i ∈ {1, . . . , n} do
Initialize:
Replay buffer D
i
with capacity N
Action-Value Q
i
with random weights θ
i
Global Action-Value
ˆ
Q
i
with weights θ
−
i
= θ
i
end
Initialize step counter T ← 0
while T < T
max
do
for each agent i ∈ {1, . . . , n} do
Receive observation o
i
Choose action a
i
according to ε-greedy policy based on Q
i
Execute action a
i
Receive next observation o
′
i
Receive reward r
i
Store transition (o
i
, a
i
, r
i
, o
′
i
) in D
i
end
for each agent i ∈ {1, . . . , n} do
Sample minibatch of transitions (o
i
, a
i
, r
i
, o
′
i
) from D
i
y
i
=
(
r
i
+ γ max
a
′
ˆ
Q
i
(o
′
i
, a
′
, θ
−
i
) if o
′
i
is not terminal
r
i
if o
′
i
is terminal
Update parameters θ
i
o
i
← o
′
i
end
T ← T + 1
if T mod max timestep = 0 then
Update Global Target Network parameters: θ
−
i
← Average(θ
i
)
end
end
enables the evaluation and comparison of IDS (allows
researchers to obtain consistent results.)(Ahsan et al.,
2023), to be defined as an IDS environment. Agents’
observations are the unlabeled rows of the dataset
(Network traffic samples), and actions correspond to
the categories associated with the labels (indicating
the class of attack.). In multi-class classification, the
objective is to train agents to classify inputs into five
different categories (actions emitted as 0, 1, 2, 3, or 4
depending on the type of intrusion) based on their ob-
servations, where 0: Dos, 1: Probe, 2: R2L, 3: U2R
and 4: Normal. In the IDS environment, the agent is
rewarded for correctly classifying each input. In our
case, the reward is 1 if the label corresponding to the
current observation matches the action taken by the
agent, and 0 otherwise. When all inputs have been
processed, the environment is reset to a random state
to restart the classification process.
5 EXPERIMENTAL RESULTS
AND ANALYSIS
To evaluate the performance of our proposed
MADQN approaches for network intrusion detection,
we utilized multiple metrics such as Accuracy, Pre-
cision, Recall, and F1-score. It is worth noting that
solely relying on Accuracy values to evaluate the
model’s performance may not provide a complete as-
sessment. To conduct a more thorough evaluation, we
analyzed the results based on the other performance
metrics. We implemented our approaches COCA-
MADQN and MADQN-GTN with NSL-KDD with
Improving Intrusion Detection Systems with Multi-Agent Deep Reinforcement Learning: Enhanced Centralized and Decentralized
Approaches
775

binary classification and multi-class classification and
it showed the high-performance metrics below with 3
DQN-agents (Table 1) and (Table 2).
Table 1: Performance metrics’ of COCA-MADQN.
Metrics for 3 agents Multi-class Binary
Accuracy 0.778 0.985
Precision 0.803 1.0
Recall 0.958 0.985
F1-score 0.874 0.992
Table 2: Performance metrics’ of MADQN-GTN.
Metrics for 3 agents Multi-class Binary
Accuracy 0.767 0.976
Precision 0.799 0.975
Recall 0.945 0.973
F1-score 0.866 0.974
The results confirm the effectiveness and robust-
ness of these two approaches in intrusion detection.
In addition, the plotted curves (Figure 3, Figure 4 )
shows the convergence of the sum of rewards during
the episodes for both test and training. As the num-
ber of episodes increases from 0 to 100, the sum of
rewards for both the test and training moves towards
a common point, indicating that the model is learning
and becoming more effective in intrusion detection.
Figure 3: COCA-MADQN convergence curve.
Figure 4: MADQN-GTN convergence curve.
This decentralized approach has overcome the
limitations of a local target network for each agent,
which often results in poor learning performance
and failure of the learning curve to converge during
the episodes for both test and training for all agents
(Figure 5), primarily due to non-stationarity issues.
Figure 5: MADQN with Local Target Network convergence
curve.
Compared to the state-of-the-art works (Table 3),
our two approaches show significant improvement
in performance on the NSL-KDD dataset in terms
of Accuracy, precision, recall, and F1-score in bi-
nary classification as well as multi-class classifica-
tion. These approaches were able to converge in
centralized MADRL. On the one hand, the proposed
COCA-MADQN approach was able to converge and
eliminate the need for a central agent to coordinate
all actions. By providing all agents equal access to
observations and allowing them to communicate with
each other, decisions were distributed and determined
by majority voting. Furthermore, the shared Replay-
Buffer allowed agents to learn from each other’s expe-
riences, leading to better coordination, scalability, and
improved performance in cooperative MARL prob-
lems. On the other hand, the proposed MADQN-
GTN approach, inspired by Vertical Federated Rein-
forcement Learning (VFRL), indicated that the use of
GTN leads to a more consistent and stable learning
process in cooperative MARL problems. Besides, we
have overcome the challenges of MARL, such as non-
stationarity and confidentiality .
6 CONCLUSION AND
PERSPECTIVES
Our experimental results demonstrated that the pro-
posed centralized and decentralised approaches are
suitable for intrusion detection systems, hence,
their capability to detect network intrusion attacks
with high accuracy, precision, recall, and F1-score.
Our presented approaches: COCA-MADQN and
MADQN-GTN, demonstrated robustness in address-
ing the challenges of non-stationarity and scalabil-
ity. However, other factors such as computational
complexity should also be considered when deciding
which approach to use. In our future work, we in-
tend to implement our proposed methods in a real-
world cloud-based environment. This will enable our
DQN-based multi-agent to enhance self-learning abil-
ities and accurately detect threats in real-time.
SECRYPT 2023 - 20th International Conference on Security and Cryptography
776
Table 3: Comparison of performance metrics’ for intrusion detection with NSL-KDD dataset.
Reference Approach Accuracy Precision Recall F1-score
(Caminero et al., 2019) AE-RL 0.8016 0.7974 0.8000 0.7940
(Suwannalai and Polprasert, 2020) AE-RL 0.8000 X X 0.7900
(Sethi et al., 2021) A-DQN 0.9720 0.9650 0.9910 0.9780
Our COCA-MADQN MADQN 0.9850 1.000 0.9850 0.9920
Our MADQN-GTN MADQN 0.9760 0.9750 0.9730 0.9740
REFERENCES
Ahsan, M. M., Raman, S., and Siddique, Z. (2023). Bsgan:
A novel oversampling technique for imbalanced pat-
tern recognitions. arXiv preprint arXiv:2305.09777.
Caminero, G., Lopez-Martin, M., and Carro, B. (2019).
Adversarial environment reinforcement learning algo-
rithm for intrusion detection. Computer Networks,
159:96–109.
Canese, L., Cardarilli, G. C., Di Nunzio, L., Fazzolari, R.,
Giardino, D., Re, M., and Span
`
o, S. (2021). Multi-
agent reinforcement learning: A review of challenges
and applications. Applied Sciences, 11(11):4948.
Ibrahim, A. M., Yau, K.-L. A., Chong, Y.-W., and Wu, C.
(2021). Applications of multi-agent deep reinforce-
ment learning: Models and algorithms. Applied Sci-
ences, 11(22):10870.
Lee, H., Hong, J., and Jeong, J. (2022). Marl-based dual re-
ward model on segmented actions for multiple mobile
robots in automated warehouse environment. Applied
Sciences, 12(9):4703.
Lopez-Martin, M., Sanchez-Esguevillas, A., Arribas, J. I.,
and Carro, B. (2022). Supervised contrastive learn-
ing over prototype-label embeddings for network in-
trusion detection. Information Fusion, 79:200–228.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
Molina-Coronado, B., Mori, U., Mendiburu, A., and
Miguel-Alonso, J. (2020). Survey of network intru-
sion detection methods from the perspective of the
knowledge discovery in databases process. IEEE
Transactions on Network and Service Management,
17(4):2451–2479.
Nguyen, N. D., Nguyen, T. T., Pham, N. T., Nguyen, H.,
Nguyen, D. T., Nguyen, T. D., Lim, C. P., Johnstone,
M., Bhatti, A., Creighton, D., et al. (2022). To-
wards designing a generic and comprehensive deep
reinforcement learning framework. Applied Intelli-
gence, pages 1–22.
Nguyen, T. T., Nguyen, N. D., and Nahavandi, S. (2020).
Deep reinforcement learning for multiagent systems:
A review of challenges, solutions, and applications.
IEEE transactions on cybernetics, 50(9):3826–3839.
Nguyen, T. T. and Reddi, V. J. (2021). Deep reinforce-
ment learning for cyber security. IEEE Transactions
on Neural Networks and Learning Systems.
Qi, J., Zhou, Q., Lei, L., and Zheng, K. (2021). Federated
reinforcement learning: Techniques, applications, and
open challenges. arXiv preprint arXiv:2108.11887.
Servin, A. and Kudenko, D. (2008). Multi-agent rein-
forcement learning for intrusion detection. In Adap-
tive Agents and Multi-Agent Systems III. Adaptation
and Multi-Agent Learning: 5th, 6th, and 7th Euro-
pean Symposium, ALAMAS 2005-2007 on Adaptive
and Learning Agents and Multi-Agent Systems, Re-
vised Selected Papers, pages 211–223. Springer.
Sethi, K., Madhav, Y. V., Kumar, R., and Bera, P. (2021).
Attention based multi-agent intrusion detection sys-
tems using reinforcement learning. Journal of Infor-
mation Security and Applications, 61:102923.
Sutton, R. S., Barto, A. G., et al. (1998). Introduction to
reinforcement learning, volume 135. MIT press Cam-
bridge.
Suwannalai, E. and Polprasert, C. (2020). Network in-
trusion detection systems using adversarial reinforce-
ment learning with deep q-network. In 2020 18th In-
ternational Conference on ICT and Knowledge Engi-
neering (ICT&KE), pages 1–7. IEEE.
Vlontzos, A., Alansary, A., Kamnitsas, K., Rueckert, D.,
and Kainz, B. (2019). Multiple landmark detec-
tion using multi-agent reinforcement learning. In
Medical Image Computing and Computer Assisted
Intervention–MICCAI 2019: 22nd International Con-
ference, Shenzhen, China, October 13–17, 2019, Pro-
ceedings, Part IV 22, pages 262–270. Springer.
Zhang, K., Yang, Z., and Bas¸ar, T. (2021). Multi-agent rein-
forcement learning: A selective overview of theories
and algorithms. Handbook of reinforcement learning
and control, pages 321–384.
Zhu, C., Dastani, M., and Wang, S. (2022). A survey of
multi-agent reinforcement learning with communica-
tion. arXiv preprint arXiv:2203.08975.
Zhu, M., Hu, Z., and Liu, P. (2014). Reinforcement learning
algorithms for adaptive cyber defense against heart-
bleed. In Proceedings of the first ACM workshop on
moving target defense, pages 51–58.
Improving Intrusion Detection Systems with Multi-Agent Deep Reinforcement Learning: Enhanced Centralized and Decentralized
Approaches
777
