
An Open Tool-Set for Simulation, Design-Space Exploration and
Optimization of Supply Chains and Inventory Problems
Tushar Lone
a
, Lekshmi P.
b
and Neha Karanjkar
c
Indian Institute of Technology Goa, India
Keywords:
Supply Chains, Inventory, Discrete-Event Simulation, Python, Meta-Models, Optimization.
Abstract:
This paper presents the design overview and work-in-progress status for InventOpt - a Python-based, open
tool-set for simulation, design space exploration and optimization of supply chains and inventory systems.
InventOpt consists of a Python library of component models that can be instantiated and connected together
to model and simulate complex supply chains. In addition, InventOpt contains a GUI-based tool to assist
the user in planning design of experiments, visualizing the objective functions over a multi-dimensional de-
sign space, building and tuning meta-models and performing meta-model assisted optimization to identify
promising regions in the design space. We present a detailed case study that illustrates the current prototype
implementation, planned features and utility of the tool-set. The case study consists of simulation-based op-
timization of inventory threshold levels in a particular supply chain system with 8 decision parameters. We
present our observations from the case study that lead to design decisions for building InventOpt such as the
choice of the meta-model type, number of simulation measurements for building the meta-model, the choice
of optimizer and the trade-off between computational cost and quality of results. A significant aspect of this
work is that each step of the process has been implemented using open Python libraries.
1 INTRODUCTION
A supply chain (SC) is a network of entities (such as
manufacturers, distributors, transporters, warehouses
etc) involved in producing, transporting, storing and
distributing goods and services. The primary goals
in the design of a supply chain are to minimize risk,
maximize net profits and satisfy end-user demands.
(Chopra et al., 2007). Modern supply chains have
complex structures, often spanning multiple conti-
nents and a large set of interconnected entities with
diverse behaviors. Simulation plays a key role in
the design, analysis and optimization of supply chain
systems. While closed-form analytical models suf-
fice to analyze simple supply chains, the use of de-
tailed simulation models becomes necessary to cap-
ture complex behaviors and dependencies between its
components with reasonable accuracy. Simulation al-
lows managers to mitigate risks by evaluating what-
if scenarios and provides a mechanism to identify
bottlenecks and optimize processes for better prof-
a
https://orcid.org/0000-0003-0008-0429
b
https://orcid.org/0000-0001-5464-6032
c
https://orcid.org/0000-0003-3111-1435
its. System Dynamics (SD), Discrete-event Simula-
tion (DES), Monte-Carlo Simulation and Hybrid sim-
ulation are some approaches used for modeling and
studying supply chains. (Mustafee et al., 2021).
Simulation-based optimization is often difficult
owing to the large number of decision variables, the
computational cost of performance estimation using
multiple stochastic simulation runs and non-convex,
black-box objective functions. Since the simulation
model is stochastic, long-run average performance es-
timates (such as the average monthly profit) at a sin-
gle design point can be obtained by averaging the re-
sults over multiple simulation runs with distinct ran-
domization seeds. If each simulation run is assumed
to take a millisecond, the time required for exhaus-
tively evaluating the entire design space will still be
prohibitive. Although there exists no analytical ex-
pression for the objective function or its derivatives in
such problems (black-box optimization), the objective
functions often display low-order trends and can be
mimicked by multi-dimensional polynomial surfaces.
Meta-model based optimization approaches exploits
this aspect. A Meta-model is a function that approx-
imates the detailed simulation model and is compu-
tationally less expensive to evaluate (Barton, 2020).
432
Lone, T., P., L. and Karanjkar, N.
An Open Tool-Set for Simulation, Design-Space Exploration and Optimization of Supply Chains and Inventory Problems.
DOI: 10.5220/0012133300003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 432-439
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

If X = (x
1
,x
2
,...,x
n
) represents a point in the n-
dimensional design space, and multiple runs of the the
stochastic simulation model estimate some average
performance metric f (X), then the meta-model g(X )
is an (ideally smooth and significantly faster to eval-
uate) function which approximates f . It can be con-
structed by measuring f at only a few points in the de-
sign space and performing some form of interpolation
or regression between them. As the number of mea-
surement points increases, the meta-model typically
becomes more and more accurate unless it suffers
from over-fitting (leading to drastic overshoots or os-
cillations in the meta-model surface in-between mea-
sured points). Continuous gradient-based optimiz-
ers can then be applied over the meta-model surface
g to quickly identify promising areas in the design
space for further exploration. Although meta-models
can assist in the optimization process, the process of
choosing the right meta-model type, the number of
data points to build the meta-model and the right op-
timizer can be non-trivial and can significantly affect
the results. Response Surface Models (RSM), Ra-
dial Basis Functions, Kriging (Gaussian Process Re-
gression), and Neural Networks (NN) are some meta-
models types that are used in various application do-
mains. Kriging, also known as Gaussian Process Re-
gression (GPR) is a spatial correlation meta-model
(Kleijnen, 2009; Ankenman et al., 2008). It uses a
kernel function to represent the correlation between
different input parameter values. Gaussian kernel,
Radial Basis Function (RBF), and periodic RBF are
some examples of kernel functions used in Kriging).
A Neural Network meta-model is built using a neu-
ral network architecture (for example, a multi-layer
feed-forward network) with the measured points as
training data to learn and mimic the input-output re-
lation. It is then used to approximate the performance
measures of the system at a given point. The pro-
cess of selecting the meta-model type, tuning it and
selecting the right optimizer for optimizing over for it
are nuanced and problem-dependent choices. While
there exist several commercial tools (such as Any-
Logic, FLEXSIM, Arena, IBM Supply Chain solu-
tions), there is a dearth of open libraries in popular
programming languages for supply chain design and
optimization. General-purpose discrete-event simula-
tion frameworks such as Python’s SimPy library (Sim,
2020) can be used for building simulation models of
supply chains. However, validation constitutes a sig-
nificant fraction of model development time. Having
an open library of validated parameterized component
models can be very useful in rapid modeling and de-
sign space exploration. In a similar vein, while there
exist open, general-purpose optimization packages,
an open tool-set specifically designed for design ex-
ploration and optimization of supply chains can have
wide utility.
This paper presents the design overview and
work-in-progress status of InventOpt - a Python-
based open library and tool-set for supply chain and
inventory systems simulation and meta-model based
optimization. InventOpt primarily consists of a li-
brary of component models for simulating supply
chains. These component models are built using
Python’s SimPy library, and can be instantiated, con-
figured and connected together to model complex
supply chains. In addition, InventOpt includes a GUI-
based tool for guided design-space exploration, meta-
model tuning and optimization. To make suitable de-
sign choices for InventOpt (such as the meta-model
type, number of measurement points relative to the
size of the design space, and the choice of the op-
timization algorithm) that are specifically suited for
simulation-based optimization of supply chains, we
present a detailed case study. The case study focuses
on modeling and simulation-based optimization of in-
ventory threshold levels in a particular supply chain
system. The case study illustrates some of the com-
ponents in InventOpt that are already built and those
that can be generalized further, and serves as a val-
idation for the meta-model based approach. Most
importantly, in this case study we perform optimiza-
tions using a wide set of meta-models and optimiz-
ers and compare the solutions to those generated us-
ing a more exhaustive search, as a means of arriv-
ing at design choices for InventOpt. The observations
from the case study lead us to design choices such as
the best meta-model type and parameters, the choice
of optimizer and the number of simulation runs for
a accuracy-versus-computational cost trade-off. The
rest of the paper is organized as follows: in Section 2,
we present a summary of related work and existing
tools for supply chain simulation and optimization.
We then present an overview of InventOpt and dis-
cuss its proposed features and implementation plan in
Section 3. Lastly, Section 4 presents the detailed case
study and a summary of the observations, insights and
conclusions gained from the case study towards the
implementation of InventOpt.
2 RELATED WORK
Anylogic (AnyLogic, 2022), FlexSim (Flexsim,
2022), and Arena (Arena, 2022) are some examples
of popular commercial tools that support supply chain
simulation. AnyLogic and FlexSim also support op-
timization, which is built on top of the OptQuest
An Open Tool-Set for Simulation, Design-Space Exploration and Optimization of Supply Chains and Inventory Problems
433

(OptQuest, 2022) optimization engine. IBM supply
chain solutions (IBM, 2022) is a suite that provides
AI-powered solutions for supply chain optimization.
Among open-source libraries for supply chain sim-
ulation, MiniSCOT (miniSCOT, 2022) is a Python
package for simulating supply chain models that was
developed by Amazon and released as open-source
in 2021 under an Apache licence. However it does
not contain any documentation or usage guidelines
and the latest commit was in 2021. supplychainpy
(Supplychainpy, 2022) is another Python library for
simulating and analyzing supply chains which is pri-
marily meant to replace existing spreadsheet-based
workflows. It accepts demand data from a csv file
and can generate performance metrics based on an-
alytical formulae. It also supports a basic Monte
Carlo simulation that generates normally distributed
demand, based on the historical data in the csv file.
For design exploration and gaining insights from the
multi-dimensional simulation data, visualization is an
important step. InventOpt will provide a GUI in-
terface to visualise 3D slices of multi-dimensional
data. For a similar purpose, Hypertools (Hypertools,
2022) is an existing Python library for visualizing
high-dimensional data. It also supports dimensional-
ity reduction using the Principal Component Analysis
(PCA) technique.
3 OVERVIEW OF InventOpt
InventOpt is a Python-based, open tool-set targeted
for simulation, design exploration and optimization
of supply chain and inventory problems. This sec-
tion describes the features and components that are
currently implemented (illustrated by the case study
in Section 4) as well as those planned to be imple-
mented in future. InventOpt consists of the following
key components:
• Component Library: An open Python library of
parameterized component models to model the behav-
ior of individual components in supply chains such as
inventory nodes, distributors, manufacturers and de-
mand/customer arrivals. These components can be
instantiated and connected together to model supply
chains with complex structures. In addition, a user
will be able to derive classes from the in-built compo-
nent classes to describe non-standard or custom be-
haviors in a modular and extensible way. Simula-
tion of the instantiated components is performed us-
ing Python’s SimPy DES library.
• Routines for Accuracy-Cost Trade-off: Once a
simulation model has been built, it is necessary to un-
derstand the trade-off between model accuracy and
computational cost. Since the model is stochastic, it is
necessary to perform multiple simulation runs to ob-
tain performance estimates. InventOpt provides rou-
tines for automatically generating the computational
cost versus accuracy trade-off plots at specified points
in the design space so that a user can predict and bud-
get the computing time for efficient design space ex-
ploration. This is illustrated in our case study pre-
sented in Section 4.
• Tool-set for Design Space Exploration: InventOpt
will provide a GUI interface that would allow a user
to describe the bounds on design variables, scripts to
sample the multi-dimensional design space by per-
forming parallel simulations efficiently at multiple
points and visualize the data over a multi-dimensional
space. This step is critical for gaining insight on
the effect of various design variables on performance
measures. It also assists in model validation by al-
lowing the user to visually check for expected trends
and unexpected outliers, possibly pointing to bugs in
the model. In the current implementation (discussed
in Section 4) this functionality is provided via Python
routines and scripts, and a GUI interface will be added
in future.
• Meta-Model Generation Routines: InventOpt
provides a basic GUI interface to build and visual-
ize meta-models for optimization. In future imple-
mentation a GUI will support the user in selecting
the meta-model type, and tuning it by specifying the
number of data points to build the meta-model and the
split between training and test data points for measur-
ing the extent of fit between the original data and the
meta-model. The tool will also provide recommen-
dations or default values for these choices. Once a
meta-model is built, goodness of fit measures (such
as sum-of-squared errors) are reported. The GUI in-
terface also allows the user to visualize the measured
points superimposed on the meta-model. Since the
meta-model is a multidimensional surface, one possi-
ble way is to visualize it as 3D slices with two axes
specified at a time and the other axes values being
fixed via user input from interactive sliders. Figure
3 shows a screenshot of such a visualization interface
we have implemented for this purpose. Using this in-
terface, the user can select two dimensions at a time
to visualize a 3D slice of the meta-model superim-
posed on the measured simulation data. For the other
dimensions, the user can select a range of values or a
particular value using interactive sliders.
• Guided Optimization: Once a meta-model has
been built, continuous optimizers can be applied to
rapidly identify promising regions for further explo-
ration or to directly perform an optimization over the
meta-model. InventOpt will provide the user an op-
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
434

tion to select and use one of several optimization al-
gorithms. For this, libraries such as scipy.optimize
and parallel optimization packages such as Pymoo
(Blank and Deb, 2020) and ParMoo (Chang, 2022)
can be utilized in the back-end. While the case study
presented in Section 4 shows the use of local opti-
mizers only, future implementations will provide the
option of using global optimizers (such as Simulated
Annealing) also. Through a simple GUI interface, In-
ventOpt will suggest optimizers and random restart
points to the user based on heuristics and the mea-
sured simulation data. It will generate convergence
plots for multiple runs of the optimizers and provide
various statistics for assisting in the optimization pro-
cess. This process can be performed iteratively: op-
timizers can be used to identify good regions in the
design space, which can be narrowed down for fine-
grained exploration to build meta-models and opti-
mize in these sub-regions.
To establish and validate the suitability of the
meta-model based approach, we perform a detailed
case study described in the next section. The prob-
lem addressed in the case study is representative of a
broad class of problems in supply chain optimization
and the insights gained can be translated into a gen-
eral approach incorporated into the InventOpt tool.
4 CASE STUDY
This case study considers the problem of optimiz-
ing the net average profit in a supply chain system
shown in Figure 1 where the decision variables for
the optimization are the inventory thresholds and re-
order points at various nodes. In this case study, we
first build a modular simulation model of this sys-
tem using classes from the InventOpt component li-
brary for each node and their connections, and per-
form basic validation. We then present a computa-
tional cost versus accuracy trade-off analysis to deter-
mine the number of simulation runs that can be rea-
sonably performed for evaluating each point in the
design space. We then perform detailed simulation-
based evaluation at points in the 8-dimensional design
space along a regular grid pattern to identify the opti-
mum points/regions with respect to a single objective
function. This data serves as a reference for evalu-
ating the meta-model based approach. We separate
the measured points into a training set and a test set.
Training sets containing various fractions of the total
measured points are used to build two kinds of meta-
models: a Neural Network based model (NN) and
a Gaussian Process Regression based model (GPR).
We then perform meta-model based optimization us-
ing multiple local optimization algorithms with ran-
dom restarts and present our observations and insights
regarding the impact of these design choices on the
quality of the results and the computational effort.
4.1 System Model
The supply chain model is shown in Figure 1 with the
model parameters associated with each node shown
in green color. The arrival of customers is modeled
as a Poisson process with an average arrival rate of
λ. Each arriving customer can go to one of the two
retailers with probabilities p and (1 − p) and try to
purchase between 1-10 units of items of a single type.
The retailers and distributors maintain an inventory of
that item and follow an < s,S > policy for its replen-
ishment. In this policy, a node proceeds to replen-
ish its inventory whenever the inventory level drops
below a certain number s, and each refill tries to re-
store the inventory level to a value S. The arrows in
the figure indicate the direction of the flow of items
and the parameters D and C associated with each ar-
row indicate the Delay (delivery time) and Cost (de-
livery/transport cost) respectively, of a bulk order be-
tween two nodes. Similarly, the parameter H associ-
ated with each inventory node indicates the inventory
Holding cost (per-item, per-day) at that node. For
a refill order, we assume that a retailer will always
prefer a distributor that results in the least delivery
cost if the required number of items are available (in-
stock) at both the distributors. If none of the distribu-
tors have the requested number of items in stock, the
refill order is deferred to the next day. We assume
Retailer R
1
s
D1,
S
D1,
H
D1
Manufacturer
M
Distributor D
1
Distributor D
2
s
D2,
S
D2,
H
D2
D
M1,
C
M1
D
M2,
C
M2
s
R1,
S
R1,
H
R1
Retailer R
2
s
R2,
S
R2,
H
R2
C
21,
D
21
C
12,
D
12
C
11,
D
11
C
22,
D
22
Customers
p
1-p
λ
Figure 1: Supply chain network example. Parameters of
each node are indicated in green.
that each item sold to the end customer generates a
profit P. The transport delay, cost and holding cost
values are assumed to be known/fixed based on data
with reasonable values assumed for this case study.
The inventory threshold and reorder parameters s,S
at each node are assumed to be the design variables
for our optimization problem, with fixed bounds. The
goal is to find optimal values of the inventory thresh-
old and restock levels such that the net average profit
of this system is maximized.
An Open Tool-Set for Simulation, Design-Space Exploration and Optimization of Supply Chains and Inventory Problems
435
The model has been implemented by writing a ba-
sic, configurable inventory-node class and a few other
classes for modeling customer arrivals and monitor-
ing. The concurrent behavior of these nodes is de-
scribed using a Process construct in Python’s SimPy
library (Sim, 2020). The individual nodes, such as re-
tailers and distributors, are implemented as derived
classes that are instantiated into the system model
by passing their respective parameter values and in-
terconnected to model the supply chain’s structure.
These classes form a part of InventOpt’s current com-
ponent library. The simulation length and the ran-
domization seed can be specified, and each simula-
tion run generates a detailed log (for validation and
insight) and an output summary consisting of perfor-
mance metrics such as the average (per-day) cost of
running this supply chain (which can be attributed to
the holding and transport costs), the average per-day
income from the sale of items and the net average
profit (denoted as P
net
).
4.2 Design Space Exploration
For a given point in the design space, say X =
(x
1
,x
2
,...,x
7
), f (X ) denotes the objective function to
be minimized. In our case study, f (X ) is the nega-
tive of the average (per-day) net profit. A single sim-
ulation run of length L days provides an estimate of
f (X). Since the model is stochastic in nature, individ-
ual simulation runs with distinct randomization seeds
will yield slightly differing outcomes. An estimate for
f (X) can be obtained by averaging the results across
multiple (say N) simulation runs with distinct ran-
domization seeds. The accuracy of a performance es-
timate increases with L and N. However, the compu-
tational cost grows directly as L × N. This limits the
number of design points that can be evaluated, given
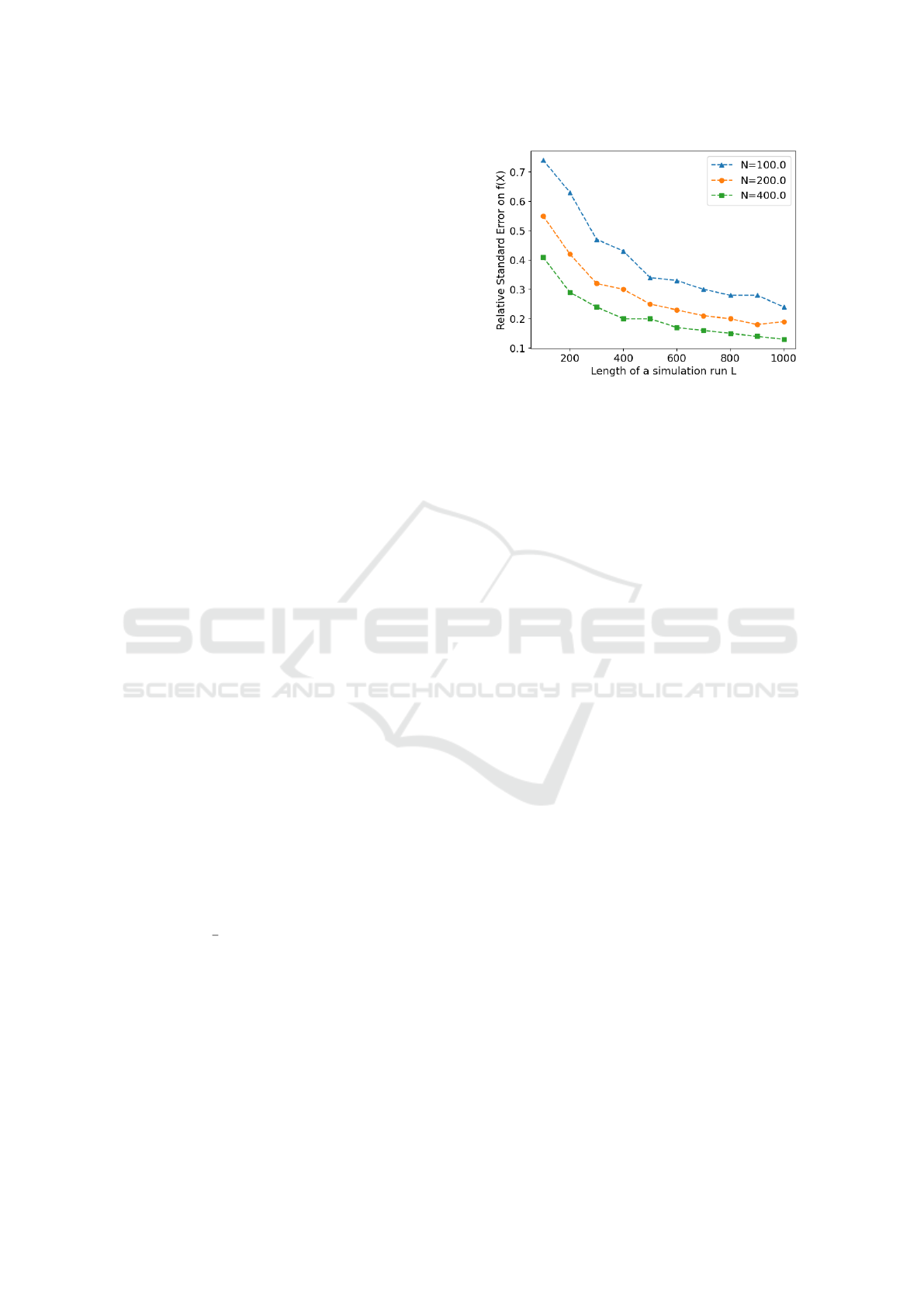
a fixed computational budget. To assess the trade-
off between the measurement accuracy and compu-
tational cost, we consider a single point in the center
of the design space and plot the Relative Standard Er-
ror (RSE) in the performance estimate obtained using
N simulation samples, each of length L. The RSE is a
measure of accuracy and reduces as the square root of
N (RSE ∝ 1/
p
(N)) since the sample average is nor-
mally distributed. Further, the RSE reduces with L
since the objective function is defined to be a long run
average measure for a model that has a steady-state
behavior. Figure 2 presents a plot of the RSE values
measured with respect to L and N.
The plot allows us to understand the accuracy
versus computational cost trade-off and budget the
available computational time for design spacey ex-
ploration. We select the simulation length L to be
Figure 2: Relative Std Error (RSE) in simulation-based per-
formance estimate as a function of simulation run length L
and the number of samples N.
720 days and the number of simulation samples N
to be 60, for a reasonable accuracy (RSE = 0.34%).
This corresponds to a serial (single-threaded) compu-
tational time of 130 seconds on a modern x86 based
workstation. Thus, estimating the objective function
value f (X) at any given point X takes approximately
130 seconds of computational time.
To gain insights on how the objective value varies
with each decision parameter, we perform design
space exploration by taking simulation-based perfor-
mance estimates at multiple points along a regular
grid in the design space. Along each axis we con-
sider 4 equi-spaced points. This results in a total
of 4
8
= 65536 design points at which we measure
f . Each measurement takes 130 seconds and thus
the entire exploration requires approximately 96 days
of serial computational time. We perform simula-
tions in parallel on a 64-core x86-based rack-server
using parallel execution scripts. With a speed-up of
64x, the design exploration could be completed in ap-
proximately two days. The measured data can pro-
vide valuable insights on how each design variable
affects the performance. However the data is multi-
dimensional. To visualize the simulation data, we
have built a GUI tool that allows the user to upload
measured data as a comma-separated-values (csv)
file, and observe the function values as 3D slices,
by selecting two axes at a time and varying the val-
ues of other axes via interactive sliders. This allows
a user to visualize trends in the objective function.
Aside from incorporating this functionality into In-
ventOpt, we have also deployed this component as
a standalone, cloud-hosted free tool called DATAvis
(https://datavis.streamlit.app). Figure 3
shows a screenshot of the data visualization tool.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
436

Figure 3: The DATAvis tool allows a user to visualize multi-dimensional data as 3D slices by selecting two axes at a time
and varying the values of other axes (at which the slice is taken) via interactive sliders. The GUI interface supports zoom-
ing/rotating the plot.
4.3 Meta-Model Based Optimization
The next steps in our case study are to perform opti-
mization and arrive at a general approach and design
choices for InventOpt. These choices are with regards
to the meta-model type, the number of data points
needed for building a reasonably accurate meta-model
and the choice of optimizer. To perform this explo-
ration, we first find optimal points in the design space
via a near-exhaustive evaluation approach. From the
set of 4
8
data points, we select good regions in the
design space, and perform fine-grained sampling in
its neighbourhood, comparing the objective values at
each point to arrive at a point X
′
which we consider as
a reference solution. We use this as a means of eval-
uating the performance of the meta-model based ap-
proach with varying choices for the meta-model and
optimizer pairs. A meta-model g(X) provides an ap-
proximation to the original objective function f (X ),
but allows significantly faster evaluation.
We build NN and GPR meta-models for this case
study and compare the results generated using each of
them. The meta-model parameters were tuned sepa-
rately. Out of the 4
8
points, we select random sub-
sets consisting of 25%, 50% and 75% points as the
training data, and the remaining points as test data to
evaluate each meta-model. For each choice we re-
port the extent of the match with the test points as
a mean squared error (MSE), summarized in Table
1. Python’s scikit-learn library (Pedregosa et al.,
2011) was used for building the meta-models. The
average computational time for building a GPR meta-
model varied between 1000-7000 seconds depending
on the training set size. For a NN model, the time
for building and training the NN model varied from
300 to 1500 seconds. Once a meta-model is built,
continuous, gradient-based optimizers can be applied
over it to quickly identify promising regions in the
design space. To arrive at a choice of optimizer for
InventOpt, we consider multiple optimizers available
in Python’s SciPy library that are well-suited for this
class of problems. The optimizers are listed in Table
1. COBYLA and Powell are trust region-based op-
timization methods while SLSQP and Nelder-Mead
are gradient-based methods and are popular choices
for black-box optimization problems. We choose
to use local optimizers rather than global optimiz-
ers because the idea is to utilize gradient informa-
tion to quickly converge to regions of interest. One
can use global optimizers such as Simulated Anneal-
ing which are more suited when the objective func-
tion is erratic or lacks trends. While this case study
only considers local optimizers, we plan to incorpo-
rate a wider choice of optimizers in the InventOpt tool
in future. Since the objective function may be non-
convex we perform multiple optimization runs with
random starting points for each optimizer. Figure 4
shows the convergence trends for each of these op-
An Open Tool-Set for Simulation, Design-Space Exploration and Optimization of Supply Chains and Inventory Problems
437

Table 1: Results obtained using multiple optimizers over a GPR meta-model built using varying sizes of training data.
Training
Dataset
Size
MSE Optimizer
Optimum
Objective
Value
Avg Number
of g(X)
Evaluation
Avg Time to
Compute g(X)
(seconds)
Distance
to Reference
Solution X
′
25%
(16,385 training
points)
0.0008
COBYLA 4203.5 355 0.0239 156.5
Powell 4327.5 346 0.0297 10.0
SLSQP 4203.5 172 0.0321 156.5
Nelder-Mead 4296.1 861 0.0294 105.9
50%
(32,768 training
points)
0.0015
COBYLA 4736.3 318 0.0726 109.0
Powell 4780.6 348 0.0635 10.0
SLSQP 4736.3 149 0.0587 109.1
Nelder-Mead 4736.3 878 0.0987 109.1
75%
(49,152 training
points)
0.0037
COBYLA 4882.7 339 0.0685 157.5
Powell 5082.1 314 0.0717 10.3
SLSQP 4882.7 145 0.0775 157.5
Nelder-Mead 5082.1 869 0.0764 10.2
timizers. Each subplot shows 20 optimization runs
with distinct, randomly chosen starting points. The
plot shows how the lowest g(X) value found varies
as the number of objective evaluations increases and
presents a rough, visual estimate of the average con-
vergence time for each optimizer. We observe that
several runs in SLSQP and Powell converge faster,
though COBYLA and Nelder-Mead are resilient to
noise. We observed that for the NN model the qual-
ity of results did not improve significantly with the
size of training data, and the GPR model yielded con-
siderably better results compared to the NN model.
This may be because of the local minima inherently
present in the NN model. The results for the GPR
model are listed in Table 1 and summarized next. The
last column in Table 1 shows the Euclidean distance
between the optimum found by an optimizer (choos-
ing the best among the 20 independent runs) and X
′
(the reference solution).
4.4 Results and Insights
Observations from the meta-model based optimiza-
tion case study show that the GPR model performs
significantly better than the NN model in terms of the
quality of solutions found. This could be attributed
to the non-smooth approximation surface in the NN
model. We observe that the quality of results ob-
tained with the NN model do not show any signif-
icant improvement with respect to the training set
size. However the NN model was found to be about
3x to 5x faster to train/build compared to the GPR
model. A more exhaustive evaluation of NN mod-
els with other architectures needs to be performed in
future. The GPR meta-model showed improved ac-
curacy (indicated by the MSE with respect to the test
data) with increasing training data-set sizes. The re-
sults for the GPR model are summarized in Table 1.
The GPR models provide a smoother surface for opti-
mization and gradient-based optimizers such as Pow-
ell and COBYLA are found to perform well over it.
Figure 4: Convergence plots for optimizers applied on the
GPR meta-model. The range of objective values g(X) on
the y-axis for all of the plots is from -5000 to -3000.
The number of data points required for building
the meta-model grows exponentially with the num-
ber of decision variables. Also, the computational
time for fitting the meta-model grows with increas-
ing training set size. We observe that the promising
regions found by the GPR meta-models built with dif-
ferent training sizes align well, indicating that an in-
cremental sampling approach to design space explo-
ration can be used. A GPR meta-model can be ini-
tially built using a small number of training samples,
optimizers could be applied over it to locate promis-
ing regions, and these regions could be explored fur-
ther using fine-grained sampling, repeated in an iter-
ative manner. Across the set of optimizers explored
in this case study, we observed that the implementa-
tion of Nelder Mead in SciPy library does not accept
parameter bounds as arguments since it is primarily
intended for unconstrained optimization. This leads
to several runs producing solutions that are outside
acceptable bounds. Although there are ways to over-
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
438

come this by modifying the objective function to in-
troduce penalties for out-of-bound solutions, we ob-
serve that COBYLA, Powell and SLSQP methods can
accept bounds and find good solutions. These meth-
ods also show good convergence results. We observe
that several runs of Powell and SLSQP converge to
good solutions rapidly.
In summary, this case study provides useful in-
sights for design choices in the implementation of
InventOpt and justifies the use of an iterative meta-
model based approach for a similar class of problems
in supply chain design and optimization. We plan
to generalize and incorporate the steps performed in
this case study into configurable, user-guided semi-
automated routines in the InventOpt tool-set.
5 CONCLUSIONS
This paper presented the design overview and work-
in-progress status of InventOpt - a Python-based open
tool-set for simulating, analysing and optimizing sup-
ply chain systems. Several components of the tool-
set have been implemented, and illustrated via a de-
tailed case-study presented in this paper. The case
study considers a simple inventory optimization prob-
lem which is representative of a wide class of prob-
lems relevant to supply chains and serves to justify the
use of the meta-modeling based approach used by In-
ventOpt. The detailed comparison across a set of op-
timization methods and model types in our case study
also serves to guide us in making design decisions in
the implementation of InventOpt.
REFERENCES
(2020). Documentation for simpy. https://simpy.
readthedocs.io/en/latest/.
Ankenman, B., Nelson, B. L., and Staum, J. (2008).
Stochastic kriging for simulation metamodeling. In
2008 Winter simulation conference, pages 362–370.
IEEE.
AnyLogic (2022). Anylogic: Simulation modeling soft-
ware. (https://www.anylogic.com/).
Arena (2022). Arena: Discrete event simulation and au-
tomation software. (https://www.rockwellautomation.
com/en-us/products/software/arena-simulation.html).
Barton, R. R. (2020). Tutorial: Metamodeling for simula-
tion. In 2020 Winter Simulation Conference (WSC),
pages 1102–1116. IEEE.
Blank, J. and Deb, K. (2020). pymoo: Multi-objective opti-
mization in python. IEEE Access, 8:89497–89509.
Chang, T. H. (2022). Python library for parallel mul-
tiobjective simulation optimization. https://parmoo.
readthedocs.io/en/latest/index.html.
Chopra, S., Meindl, P., and Kalra, D. V. (2007). Supply
Chain Management by Pearson. Pearson Education
India.
Flexsim (2022). Flexsim. (https://www.flexsim.com//).
Hypertools (2022). Hypertools: library for visualizing and
manipulating high-dimensional data in python. (https:
//hypertools.readthedocs.io/en/latest/).
IBM (2022). Ibm supply chain solutions: Python based li-
brary for supply chain analysis, modeling and simula-
tion. (https://www.ibm.com/supply-chain).
Kleijnen, J. P. (2009). Kriging metamodeling in simulation:
A review. European journal of operational research,
192(3):707–716.
miniSCOT (2022). miniscot: simulation tool for sup-
ply chain architecture and algorithms. (https://github.
com/amzn/supply-chain-simulation-environment).
Mustafee, N., Katsaliaki, K., and Taylor, S. J. E. (2021).
Distributed approaches to supply chain simulation: A
review. ACM Trans. Model. Comput. Simul., 31(4).
OptQuest (2022). Optquest: Opimisation engine. (https:
//www.opttek.com/).
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Supplychainpy (2022). Supplychainpy: Python based
library for supply chain analysis, modeling and
simulation. (https://github.com/KevinFasusi/
supplychainpy).
An Open Tool-Set for Simulation, Design-Space Exploration and Optimization of Supply Chains and Inventory Problems
439
