
Software Development Life Cycle for Engineering AI Planning Systems
Ilche Georgievski
a
Service Computing Department, IAAS, University of Stuttgart, Universitaetsstrasse 38, Stuttgart, Germany
Keywords:
AI Planning, Software Development Life Cycle, Software Engineering, AI Engineering.
Abstract:
AI planning is concerned with the automated generation of plans in terms of actions that need to be executed
to achieve a given user goal. Considering the central role of this ability in AI and the prominence of AI
planning in research and industry, the development of AI planning software and its integration into production
architectures are becoming important. However, building and managing AI planning systems is a complex
process with its own peculiarities, and requires expertise. On the one hand, significant engineering challenges
exist that relate to the design of planning domain models and system architectures, deployment, integration,
and system performance. On the other hand, no life cycle or methodology currently exists that encompasses
all phases relevant to the development process to ensure AI planning systems have high quality and industrial
strength. In this paper, we propose a software development life cycle for engineering AI planning systems. It
consists of ten phases, each described in terms of purpose and available tools and approaches for its execution.
We also discuss several open research and development challenges pertaining to the life cycle and its phases.
1 INTRODUCTION
In 1966, Shakey was the first general-purpose mobile
robot with the ability to plan its own actions (Nils-
son, 1984). Shakey also marked the inception of Ar-
tificial Intelligence (AI) planning, a research and de-
velopment discipline that deals with the computation
of plans of actions for achieving a user goal (Ghal-
lab et al., 2004). In other words, AI planning is con-
cerned with solving planning problems that consist of
an initial state of the world, a planning domain model
in terms of actions that can change the world, and a
goal state of the world that represents the user goal.
A plan, which is a course of actions, is solution to
a planning problem if it leads from the initial state
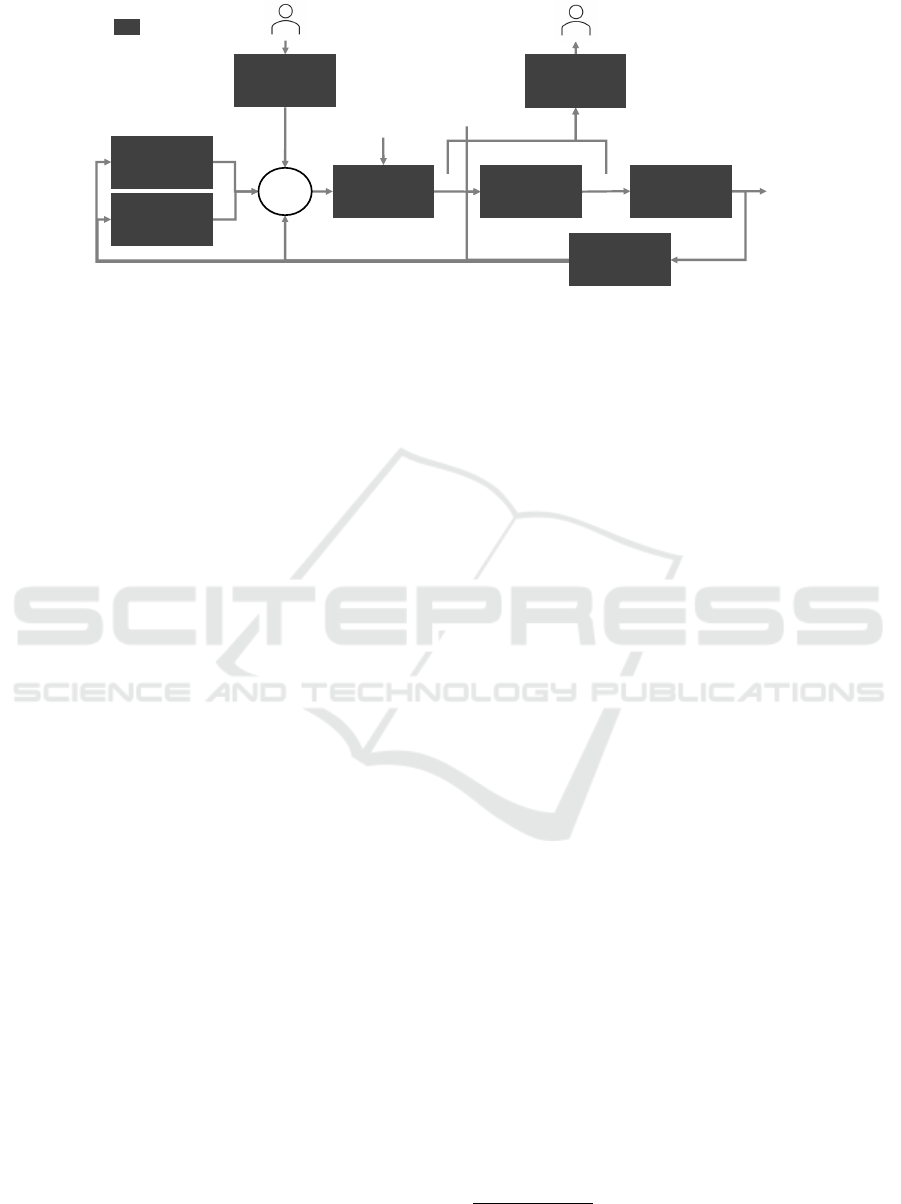
to the goal. The field of AI planning is now abound
in approaches, algorithms and tools for addressing is-
sues of various aspects of the planning process (see
Figure 1). In the last few years, there is a growing
demand for AI planning technology in real applica-
tions, such as space exploration (Chien and Morris,
2014), robotics (Karpas and Magazzeni, 2020), and
autonomous driving (Alnazer et al., 2022).
These developments highlight the need for devel-
oping AI planning systems and integrating them into
existing software architectures. Within AI planning
discipline, the engineering and developing AI plan-
a
https://orcid.org/0000-0001-6745-0063
ning systems is often portrayed as two things: the
development of algorithms and engineering of plan-
ning domain models. In practice, these ingredients
constitute only a part of what is needed to construct
and use operational AI planning systems (Georgievski
and Breitenb
¨
ucher, 2021). Particularly, developing an
AI planning system involves many complex activi-
ties: choosing the correct underlying planning model,
knowledge engineering, dealing with numerous plan-
ning functionalities, architecting a design without
an established interoperability mechanism for plan-
ning software components, choosing suitable plan-
ning tools, and collecting and analysing relevant data.
As a result, building such AI planning systems is a
complex process and demands immerse knowledge
about the application domain of interest, expertise in
AI planning, and proficiency in software engineering.
While most of existing AI planning software arte-
facts were developed as research projects, it is un-
clear whether they were developed considering any
traditional software development life cycle. Never-
theless, AI planning faces many of the challenges
in traditional software development, such as require-
ments analysis, testing, code review, documentation,
etc. AI planning systems, however, are different from
traditional software in several ways, and present new
challenges that are not accounted for in existing soft-
ware development life cycles (see (Munassar and Go-
Georgievski, I.
Software Development Life Cycle for Engineering AI Planning Systems.
DOI: 10.5220/0012149100003538
In Proceedings of the 18th International Conference on Software Technologies (ICSOFT 2023), pages 751-760
ISBN: 978-989-758-665-1; ISSN: 2184-2833
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
751
Plan
© Ilche Georgievski
Temporal Constraints
Schedule
Action
State (observed)
Event/Failure
State (observed)
Goals
Actions
Heuristics
Concept/Process
Modelling
Actions
Learning
Actions
Learning
Goals
Plan
Generation
Scheduling
Explanation
Monitoring
Execution
Domain expert
User
Planning
problem
Environment
Figure 1: Viewpoint on an AI Planning Process.
vardhan, 2010)), especially in an integrated way. One
difference is that the objective in AI planning is to
compute and execute plans often optimised with re-
spect to some metric, such as energy cost, instead
of only achieving functional requirements. This im-
plies developers would need to continuously improve
a planning system (e.g., test newest underlying plan-
ning models, update user goals) to achieve the aim
(e.g., minimum cost paid for consumed energy). Fur-
thermore, AI planning systems seem to be more com-
plex to manage because their performance depends on
data representing the world, planning domain mod-
els, tuning algorithms (e.g., selecting or devising suit-
able heuristics), implicit feedback from the world and
explicit user’s feedback, in-depth data analysis (e.g.,
to design a planning domain model, identify or con-
sider biased/ethical implications of automated plan-
ning decisions), distributed computation of a global
plan, etc. Finally, AI planning systems are likely
developed by people with different expertise, where
transferring planning artefacts among them might be
challenging. For example, a planning expert might
create and transfer a planning domain model to a soft-
ware engineer for use in the planning system being
developed. Any issues that may arise in relation to
this might lead to incorrect behaviour (e.g., the system
computes plans but they are not valid), which would
be hard for the software engineer without planning ex-
pertise to identify and address.
As none of the traditional software development
life cycles covers the complexity and specificities of
AI planning, and no other methodology exists that
covers and treats all relevant phases AI planning sys-
tems could and should go through, we propose a soft-
ware development life cycle for engineering AI plan-
ning systems. The life cycle is an agile and iterative
process consisting of ten phases as preliminary con-
ceptualised in (Georgievski, 2023). We describe each
phase in detail, including its purpose, the approaches,
and tools currently available to execute it.
Our contributions are manifold. On the one hand,
we present a complete software development life cy-
cle aimed at addressing engineering challenges in AI
planning. On the other hand, through this lifecycle,
we (1) provide a common understanding of how AI
planning software is designed, developed, deployed,
and refined; this will enable not only cooperation
between involved parties (e.g., individuals, groups,
mixed AI-human teams) but also facilitate the deploy-
ment of AI planning in real applications,
1
(2) render
or highlight for the first time some essential aspects
of AI planning one needs to consider when building
AI planning systems, (3) support the incorporation of
quality and effectiveness in the engineering process of
AI planning systems, and (4) provide a basis for dis-
cussion in AI planning and AI engineering fields and
a stepping stone for future research in this direction.
The rest of the paper is organised as follows. Sec-
tion 2 introduces the proposed life cycle. Section 3
presents an analysis of the lifecycle scope and open
challenges. Section 4 describes related works, and
Section 5 concludes the paper.
2 PROPOSED LIFE CYCLE
To address the question of what phases a typical AI
planning system should go through, how these phases
relate to one another, and how they can be conducted,
we present the Software Development Life Cycle for
Engineering AI Planning Systems, called PlanXflow.
Figure 2 illustrates the proposed life cycle, which is
based on more than ten years of research, develop-
ment, and teaching experiences in the field. We de-
scribe next each of its ten phases.
1
Only 53% of AI projects move from prototypes to pro-
duction due to the lack of resources to build and operate
ICSOFT 2023 - 18th International Conference on Software Technologies
752

Requirements
Analysis
AI Planning Model
Formulation
Domain Model
Design
System Architecture
and Design
AI Planning Tools
Selection
Implementation
Testing
Deployment
Monitoring
Analysis
Software Development
Lifecycle for
AI Planning
1
2
3
4
5
6
7
8
9
10
Figure 2: Overview of the Software Development Life Cycle for AI Planning Systems.
2.1 Requirements Analysis
The first phase is Requirements Analysis, which in-
dicates that the development of AI planning systems
must begin with the identification of requirements by
the relevant stakeholders (Grady, 2014). In the con-
text of AI planning, one can distinguish functional,
non-functional, domain-oriented and user-related re-
quirements. Functional requirements define the ba-
sic behaviour of the AI planning system, including
not only the required functionality but also the kind
of planning problems to be addressed and possible
restrictions that should be considered in the overall
planning and execution process. In particular, plan-
ning systems for real-world applications go beyond
plan generation only. Such applications often require
a wider spectrum of functionalities that range from
support for modelling planning domains and prob-
lems, to solving planning problems, to executing, val-
idating, and explaining plans and planning decisions,
to managing and monitoring the overall planning sys-
tem. In fact, one can select from and combine at
least 19 types of different planning functionalities as
reported in (Georgievski, 2022). While all types of
planning functionalities can be used to create an ad-
vanced AI planning system, not all of them may have
the same role in a system. For example, in an on-
line AI planning editor, the Modelling and Parsing
production-ready AI systems (Gartner, Inc., 2020).
functionalities would be core functionalities, while
the Solving functionality would be a supporting one
as it is not essential for modelling planning problems
but it may make the online editor complete.
Non-functional requirements define the quality
properties that affect the experience of using AI
planning systems, such as performance, scalability,
reusability, or maintainability. With the exception
of performance of planning systems in terms of time
needed to solve planning problems, non-functional re-
quirements are often not considered as important fac-
tors in the AI planning literature even though their
early detection and addressing into architecture de-
signs can lead to reduction of cost and effort as known
from developing software in other contexts.
Domain-oriented requirements define the relevant
entities an AI planning system can use and objectives
it should achieve in the application domain of inter-
est. These requirements cover the goal-oriented re-
quirements defined in the context of AI planning (van
Lamsweerde, 2009; Ambreen et al., 2018). Neverthe-
less, domain-oriented requirements are used to cap-
ture knowledge needed for the planning domain and
specific planning problems. The acquisition of these
requirements is expected to be done in an integrated
form, which would enable the translation of these re-
quirements into formal models needed by some plan-
ning functionalities (Silva et al., 2020).
User-related requirements define requirements
relevant for the user. As Asimov’s laws express
Software Development Life Cycle for Engineering AI Planning Systems
753

that robots must never harm humans in their op-
eration (Asimov et al., 1984), user-related require-
ments can specify that AI planning systems should
not put at risk the safety of humans, disclose privacy-
sensitive data, affect the effectiveness and comfort
of users in their intentions or when performing their
tasks. Finally, the decisions and actions taken by
AI planning systems may need to be explained to
users (Chakraborti et al., 2020).
The requirements should be attributed with met-
rics and documented so that the resulting AI planning
system can be validated, verified, or evaluated in other
lifecycle phases, such as the Analysis phase (see Sec-
tion 2.10). For example, the quality of planning do-
main models can be assessed concerning their accu-
racy, consistency and completeness, the adequacy of
the representational language, and the operationality
of the software component with a Solving functional-
ity concerning the planning domain model (see (Mc-
Cluskey et al., 2017)).
2.2 AI Planning Model Formulation
The AI Planning Model Formulation phase is per-
formed to decide and formulate a suitable planning
model as a blueprint for the AI planning system. We
define a planning model as a specific form of plan-
ning distinguished by a planning type, world context,
and user features. A planning type encompasses a set
of planning approaches or planning algorithms that
share the same underlying structure, assumptions, or
qualities. One can distinguish various types of plan-
ning. Classical planning is the most basic and re-
strictive type, where actions play a key role. This
planning type is based on several restrictive assump-
tions that simplify how the world looks like and oper-
ates (e.g., the world is static, fully observable, deter-
ministic, and instantaneous). There exist other plan-
ning types that relax one or more of those assump-
tions by adding expressiveness or some algorithmic
features. These planning types include numeric plan-
ning, temporal planning, probabilistic planning, con-
tingent planning, conformant planning, conditional
planning, distributed planning, continual planning,
etc. A line of planning structurally different than the
aforementioned planning types is represented by hier-
archical planning (Georgievski and Aiello, 2015). In
addition to actions, hierarchical planning uses tasks
and other expressiveness constructs to organise the
domain knowledge at different levels of abstraction.
Furthermore, we define a world context as a char-
acterisation of an aspect or a situation in the world.
A planning model may disregard world contexts to
simplify planning problems. A planning model may
tolerate or exploit a world context by anticipating un-
expected events in the environment and/or controlling
and interacting with the world. So, including a world
context in the planning model makes the planning
process more complete or realistic. A user feature is
a something of importance to the user. For example,
a domain expert may want to model planning prob-
lems or an end-user may need to be provided with an
opportunity to explore found plans before their execu-
tion. Note that a planning type might exist that covers
some world context or user feature. Analysis of their
mutual inclusiveness is out of the scope of this work.
The kind of planning model dictates different
needs and considerations when developing planning
domains and when designing and realising the over-
all AI planning system. Consequently, the formula-
tion of an adequate planning model is a critical phase.
The formulation should be based on all requirements
from the previous phase, particularly the functional
and domain-oriented requirements. Formulating an
adequate planning model is a complex task and may
require expertise and experience in AI planning. It
can also be time-consuming.
2.3 Domain Model Design
As AI planning is a knowledge-based AI approach,
the design of systems requires engineering of applica-
tion domain knowledge in a precise and correct form
so that the systems can produce and execute valid
plans. In AI planning, one sees knowledge engineer-
ing as a modelling process (Studer et al., 1998), which
involves constructing a domain model that abstractly
and conceptually describes the knowledge of the ap-
plication area. A planning domain model is a formal
representation of such a domain model.
The Domain Model Design phase is dedicated to
the creation of a planning domain model. In gen-
eral, the design process starts by deriving domain in-
formation from the requirements collected in the first
phase, specifically, from the domain-oriented require-
ments. On the one hand, the domain information in-
cludes object classes, properties, relations, actions,
and tasks, and on the other hand, assumptions and
features that are essential for the representation of
the planning domain model (e.g., propositional logic
at minimum). The domain information is then con-
ceptualised and formalised using a selected planning
language compatible with the planning model formu-
lated in the previous phase. Examples of planning
languages include Planning Domain Definition Lan-
guage (PDDL), Hierarchical Domain Definition Lan-
guage (HDDL) (H
¨
oller et al., 2020), SHOP2 (Nau
et al., 2003), etc. When encoded in such a language,
ICSOFT 2023 - 18th International Conference on Software Technologies
754

the planning domain model can be fed in into a soft-
ware component with a Parsing and Solving func-
tionalities, assuming the component supports the cho-
sen planning syntax and all expressiveness constructs
used in the planning domain model.
Domain modelling is a tedious and error-prone
task without a clear and established methodology for
approaching it and engineering the knowledge in the
required form. However, some studies analyse do-
main modelling issues and propose separate design
processes one could follow, e.g., (Vaquero et al.,
2011a; Silva et al., 2020). Some modelling tools can
smooth down the difficulty of knowledge engineering
and support the domain modelling, e.g., itSimple (Va-
quero et al., 2013).
2.4 System Architecture and Design
Addressing a real-world planning problem will likely
require combining several planning functionalities
into a single planning system that can solve the prob-
lem and satisfy stakeholders’ requirements. That is,
using the functional requirements, planning model
and planning domain model defined in the previous
phases, the System Architecture and Design phase is
concerned with conceptualising an abstract architec-
ture that consists of suitable planning components and
relationships between them. Doing this enables not
only analysing the planning system’s behaviour but
also making early design decisions that can impact the
development and deployment of the resulting plan-
ning system. The planning model is essential here
as it directs the conditions for interactions between
the planning components to ensure their compatibil-
ity and correctness of the entire process. That is,
the interaction constraints represent the allowed con-
nections among the constituting components. If nec-
essary and possible, the system architecture can be
refined considering the specificities of the involved
planning tools, such as data structures or supported
features (e.g., some planning tools may not support
logical negation even though logical negation is part
of PDDL). In any case, the resulting system architec-
ture design should provide sufficient information for
the selection and/or implementation of required com-
ponents in the next phases.
Consider that existing planning tools are mostly
developed in isolation without considering communi-
cation and interoperability issues, i.e., the tools are
designed, developed, and tested per type of planning
functionality. For example, domain modellers are de-
signed and developed independently from planners,
which the domain modellers would eventually depend
upon. Placing needed planning functionalities (i.e.,
their components) into context is investigated on sev-
eral occasions where only a limited number of coarse-
grained planning components are organised into sys-
tem architectures. For example, CPEF (Myers, 1999),
PELEA (Alc et al., 2012), and SOA-PE (Vulgar-
akis Feljan et al., 2015) provide planning architec-
tures that consist of components for solving planning
problems, executing plans, monitoring the execution,
and replanning hardwired to operate in a predefined
order. In CPEF, a central component manages the op-
eration of the entire planning system.
To design and develop new AI planning systems
that are robust, flexible and scalable, the different
planning functionalities could be designed and re-
alised as services (Georgievski, 2022), and their co-
ordination and data exchange can be accomplished
using workflows (Georgievski and Breitenb
¨
ucher,
2021), which represent a proven and effective ap-
proach for orchestration in many applications (Ley-
mann and Roller, 1997).
2.5 AI Planning Tools Selection
When we have a planning problem we want to solve,
we usually look for an off-the-shelf tool. In this con-
text and in line with the reusability intention within
the AI planning community in terms of providing
domain-independent tools and the reusability goal
of AI engineering (Georgievski and Breitenb
¨
ucher,
2021; Bosch et al., 2021), we should explore and
select if available existing planning tools before en-
tering the phase to implement the required planning
components. In the AI Planning Tools Selection
phase, existing planning tools (e.g., code, tools, ser-
vices) are searched to find and select appropriate im-
plementations for the needed planning functionalities.
Research in AI planning has traditionally concen-
trated on developing techniques and algorithms that
are continuously enhanced with delicate features. The
result is a large corpus of planning tools, most of
which offer a Solving functionality and are called
planners. For example, one can count 235 planners
as participants in International Planning Competition
from 2006 to 2020. Other planning tools focus on
modelling planning problems, learning planning do-
mains, and validating plans. In addition, the plan-
ning tools are diverse in terms of supported operating
systems, dependencies, programming languages, and
supported planning languages. Suppose one analy-
ses the ten most cited planning tools. One can ob-
serve that many of them are restricted to running on a
Linux environment, they have at least three dependen-
cies without support for their management, they are
implemented in various programming languages with
Software Development Life Cycle for Engineering AI Planning Systems
755

C, C++, Java, and Common Lisp being the most com-
mon ones, and most of these planners support some
version of PDDL.
The presented discussion indicates it is challeng-
ing to keep track of all the planning tools and know
their characteristics and the features they support.
Some initial work has been carried out in collect-
ing and categorising planning tools. For example,
Georgievski and Aiello characterise several hierarchi-
cal planners (Georgievski and Aiello, 2015), while
Planning.Wiki provides a list of planners accompa-
nied by a short description and references (Green
et al., 2019). In any case, those interested in integrat-
ing a planning tool into a planning system have much
work to do when looking for a suitable planning tool.
2.6 Implementation
The Implementation phase is devoted to implement-
ing the planning system based on the system archi-
tecture design. The implementation includes the de-
velopment of components for planning functionalities
for which no existing tool can be found, and the de-
velopment of communication mechanisms, depend-
ing on the type of communication required between
the planning components. This phase may also be
concerned with the modification of planning domain
models as a consequence of the capabilities of se-
lected planning tools (e.g., a planning domain model
may need to be updated to account for the inabil-
ity of a planner to deal with negative propositions).
For each planning component to be implemented, the
classical software development lifecycle can be en-
tered at this point.
2.7 Testing
In the Testing phase, the AI planning system is tested
to validate and verify its behaviour concerning the
requirements, quality attributes, and corresponding
metrics specified in the first phase. As for other
software, two types of testing should be performed:
isolated tests and integration tests (Wu et al., 2003).
All planning artefacts, such as planning components,
the planning domain model, problem instances, and
workflow models, should be tested in isolation. To
our knowledge, there is only an established strategy
for testing planning domain models. In particular,
a planning domain model is typically debugged and
validated by testing a selected planner to solve a par-
ticular problem instance using the planning domain
model. The quality of a planning domain model is
conventionally assessed concerning adequacy, while
other metrics include accuracy and operationality.
The AI planning research community has estab-
lished a practice for testing planners in occasional
competitions for the best planner in terms of planning
time and plan quality on a set of benchmark planning
domains. While some benchmark planning domains
are inspired from real-world applications, most of
them represent synthetic knowledge suitable for test-
ing the speed of computation and possibly for debug-
ging purposes. Georgievski and Aiello Georgievski
and Aiello (2016) present a strategy for testing plan-
ners with the purpose of understanding how well the
planners meet the application requirements. The strat-
egy consists of specifying a testing configuration, al-
gorithmic configuration, knowledge base about rele-
vant planning problems, computational factors, and
scalability considerations.
Integration tests are needed to verify that all plan-
ning artefacts can work correctly together. To the best
of our knowledge, a holistic testing approach for plan-
ning systems has not been established yet.
2.8 Deployment
The Deployment phase is used to make the AI plan-
ning system ready and available for use. A cen-
tralised AI planning system can be deployed to an
environment with enough processing power. Here,
the constituent planning components can be deployed
manually. However, the manual process of installa-
tion, configuration, and deployment of existing plan-
ning tools not only requires technical proficiency
given their heterogeneity but also is time consuming
and error prone given the obscurity of setup instruc-
tions (Georgievski and Breitenb
¨
ucher, 2021). Au-
tomated deployment represents a better fit for cen-
tralised AI planning systems. Unfortunately, not
much information on this topic can be found in the
AI planning literature.
Moving an AI planning system with distributed
planning to production can be even more challenging,
mainly for two of its processes, plan generation and
plan execution. Distributed planning and execution
require distributed planning components to have com-
mon objectives and representations, exchange infor-
mation about their current plans, and plans iteratively
refined and revised until they fit together. There are
many possible deployment environments (e.g., cloud,
fog and edge), however, there is no standard way to
deploy the planning elements (e.g., which parts of
planning domain models should be deployed where)
to these diverse environments and guarantee success-
ful and correct operation of the AI planning system.
The successful operation of AI planning systems
depend on not only on how well their software com-
ICSOFT 2023 - 18th International Conference on Software Technologies
756
ponents and planning domain models are engineered,
but also on the reliability of the entire process start-
ing from collecting data from the world environment,
transforming it to correct planning problem instances,
to computing and executing valid plans back in the
world environment. All this requires care in repro-
ducing the software environments, the entire process
with relevant parameters, etc. used in development.
2.9 Monitoring
In the Monitoring phase, the planning system and ex-
ecution environment are monitored to understand the
system’s behaviour and its constituent components,
especially the cases of problems and unexpected be-
haviour. Monitoring entails collecting data prove-
nance. Generally, provenance is the documentation
of the information that describes the origin and pro-
duction process of an object or a piece of data (Her-
schel et al., 2017). The information typically in-
cludes metadata about entities, data, processes, activ-
ities, and people involved in the production process.
The collection and processing of provenance provide
several benefits, such as improving the understand-
ing of the process and the result, quality assessment
and quality improvement, ensuring reproducibility,
and technical requirements, such as runtime perfor-
mance and scalability. Of interest in our treatment is
data provenance, which is defined as the information
about individual data items and operations involved
with those data items (Herschel et al., 2017).
In the context of AI planning, the literature has
mostly focused on studying provenance of plans, par-
ticularly plan rationales, which deal with “why a plan
is the way it is” and “the reason as to why the plan-
ning decisions were taken” (Polyak and Tate, 1998),
and plan evaluation rationales, which deal with “why
a certain plan element does or does not satisfy a cri-
terion” or “why a plan was classified into a specific
quality level” (Vaquero et al., 2011b). However, data
provenance is crucial not only for understanding the
life cycle of plans, but also the correctness, accuracy,
and other quality attributes of other planning artefacts
(e.g., planning domain model, problem instances),
improving the planning process, establishing causal-
ity and dependency, establishing responsibility (e.g.,
who is responsible for which data), and explainabil-
ity. Also, data provenance can be used to support the
selection of planning tools and to improve the perfor-
mance of the overall planning systems.
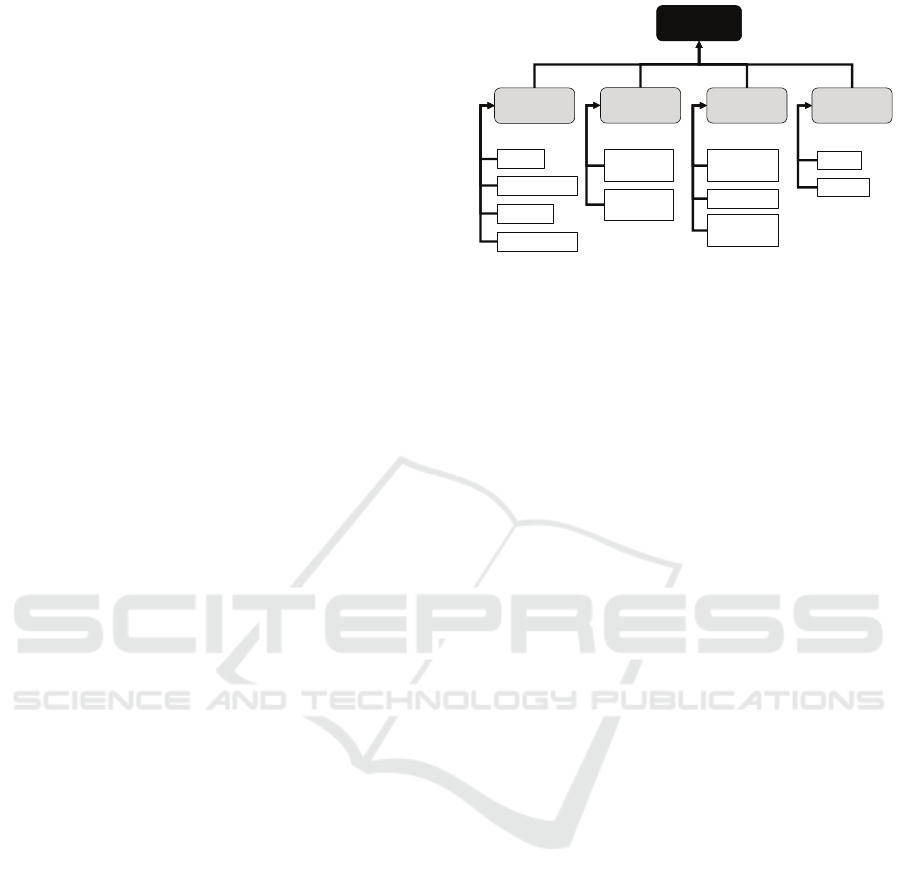
Based on this discussion and from our own ex-
perience, we present a preliminary collection of data
provenance types that can be collected and analysed
in AI planning systems. We organise data provenance
Planning
Provenance
Planning
Process
Domain
Knowledge
System Data
Plan
Goals
Actions
Constraints
Preferences
Input
Output
Planning
state
Heuristics
Plan
Structure
Plan Quality
Plan
Execution
Figure 3: Preliminary Types of Data Provenance in AI Plan-
ning.
in AI planning into four categories as shown in Fig-
ure 3. The category of Domain Knowledge indicates
that information about the planning domain should be
collected, such as identification of new constraints or
preferences that were initially not obvious, or identifi-
cation of additional requirements for goals or actions.
The collection and analysis of this category of data
provenance would enable refining the planning do-
main, including both the domain model and problem
instances. The category of Planning Process focuses
on data provenance about the state of world used in
the planning process and heuristics used to guide the
plan generation. The Plan category includes prove-
nance about the structure and quality of plans, which
relate to the plan rationales and plan evaluation ratio-
nales, respectively, and provenance about plan execu-
tion, which is especially important as sensors, soft-
ware components, unexpected events, people, and ex-
ecution of a previous plan can influence the execution
of the current plan (Canal et al., 2020). Finally, the
category of System Data refers to the input data and
output data that are needed for the operation of the
resulting planning system.
2.10 Analysis
The Analysis phases is dedicated to analysing data
provenance collected in the previous phase. The anal-
ysis requires capabilities to identify problems, ask
questions and generate relevant insights with the ob-
jectives of improving all aspects of the planning sys-
tem (e.g., domain knowledge, planning process), en-
able traceability, reproducibility, and explainability.
When this phase is concluded, the next iteration of
PlanXflow can be started where actions are taken ac-
cording to the generated insights in the analysis phase,
e.g., refine the planning domain model or integrate an
alternative component with a Solving functionality.
Software Development Life Cycle for Engineering AI Planning Systems
757

3 DISCUSSION
PlanXflow represents a general process for design-
ing, developing, and deploying AI planning systems.
As such, adjusting some of the lifecycle phases to
the specific requirements of some AI planning sys-
tems might be necessary. For example, the Domain
Model Design phase can be adjusted to include the
verification and validation steps of the planning do-
main model (Silva et al., 2020). Using our structured
approach for engineering AI planning systems may
conflict with a more loose approach adopted in the re-
search. However, the proposed life cycle has a certain
degree of flexibility. Developers can work with se-
lected phases and adjust the order of those phases as
needed. Some phases are part of the general life cycle
because of the limited understanding of AI planning
by non-experts. For example, the AI Planning Tools
Selection phase might not be needed if a planning ex-
pert is available to point out the right tools for ad-
dressing the problem at hand. Furthermore, we sug-
gest using workflows to orchestrate non-trivial plan-
ning applications in the System Architecture and De-
sign phase. However, the life cycle can still be used
even if workflows might not be needed for a planning
system.
Some phases can drastically change due to new
advancements of AI planning or other technology.
For example, the Requirements Analysis phase could
be adapted to include AI-driven requirements (Bosch
et al., 2018), the AI Planning Model Formulation
phase can be adapted or completely discarded if some
method appears to be good at providing relevant rec-
ommendations, or the System Architecture and De-
sign phase may need to be adjusted if a toolbox of
standardised planning services becomes available.
The presented software development life cycle is
intended to provide the basis for discussions among
practitioners and researchers of AI planning, and to
potentially enable future research in this direction.
For example, there are several open challenges that
can be addressed to support individual phases and im-
prove the current life cycle. One such challenge is
the formulation of suitable planning models, which
could be addressed by developing a decision-support
system. Another challenge is the accessibility and se-
lection of suitable planning tools. One option to ad-
dress this would be to have a database of available
planning tools with details relevant to development, a
toolbox, or even a recommender system that will as-
sist users in finding which tool is suitable for address-
ing which part of the planning problem, thus facil-
itating the development of planning systems. In this
context, portfolio-based approaches, especially online
ones, could be useful as they learn to suggest the right
planner for a given task (Ma et al., 2020). Further-
more, the design of a holistic strategy for testing plan-
ning systems and the development of isolated testing
strategies for individual planning artefacts are open
research challenges. For deploying AI planning sys-
tems, we need to investigate appropriate deployment
models for both centralised and distributed planning
where all required planning components and deploy-
ment information are described in a standard manner,
providing for reusability and maintainability.
One could upgrade the life cycle by defining sep-
arate life cycles for selected planning artefacts and
interweaving them in the corresponding phases. For
example, a separate life cycle for designing domain
models can be created and integrated in the Domain
Model Design phase. Finally, a further analysis of
data provenance in AI planning might be necessary to
refine even more the hierarchy presented in Figure 3,
and new approaches are needed to collect and analyse
data provenance for all categories.
4 RELATED WORK
To the best of our knowledge, there is no work that
studies the software development life cycle for con-
structing AI planning systems. There are some stud-
ies, guidelines and established practices that are re-
lated to some aspect of some of our individual phases.
For example, Silva et al. (2020) focus on the pro-
cess of designing planning domain models for which
they present several phases. This process is compati-
ble with our phase of Domain Model Design and can
even serve as a basis for creating a separate Domain
Model Design life cycle. Pellier and Fiorino (2018)
provide guidelines on how to setup and build PDDL4J
on a host platform accompanied with a set of planning
problems encoded in PDDL to test the planners avail-
able in PDDL4J, and on how to integrate the avail-
able planners in third-party applications. Muise et al.
(2022) provide guidelines for using PLANUTILS, a
library for setting up Linux environments for devel-
oping, executing, and testing planners. The guidelines
explain how to use the planners available in the library
and how to add a new package to the library, for ex-
ample, if one wished to add a new planner.
Outside the AI planning field but within AI, one
can observe the appearance of a couple of new soft-
ware development life cycles created for specific
types of systems. Zaharia et al. (2018) analyse chal-
lenges in developing machine learning based systems
and describe a platform that can be used to struc-
ture and streamline the machine learning development
ICSOFT 2023 - 18th International Conference on Software Technologies
758

lifecycle. Olszewska (2019) describes challenges in
engineering intelligent vision systems and proposes
an adapted software development life cycle with
the aim to support developers create quality intelli-
gent vision systems of the new generation. Outside
AI, Weder et al. (2022) discuss the challenges quan-
tum computing introduces when engineering quantum
applications and proposes an adapted software devel-
opment life cycle aim at developing and executing
such applications.
5 CONCLUSION
AI planning originated in the mid-1960s, and since
then, many approaches have been proposed mainly
around two concerns, namely knowledge representa-
tion, and reasoning. Those approaches have demon-
strated the excellence of AI planning by prototyping
planning tools and evaluating them in experiments.
The prominence of AI planning is growing by being
integrated into real-world applications, highlighting
the need to build AI planning systems for prototyp-
ing and experiments, and industrial deployments. De-
spite the fruitfulness of the discipline with algorithms
and planning tools, especially planners, a complete
and integrated overview of the phases needed to de-
sign, develop, and deploy planning systems is miss-
ing. Moreover, a common understanding of relevant
phases is needed, which would not only serve inter-
disciplinary development teams and non-experts but
would also enable discussion within the AI planning
community and the emerging AI engineering commu-
nity and possibly foster new research. Therefore, we
introduced PlanXflow, a software development life
cycle for engineering AI planning systems, which
consists of ten phases that may happen during the
design, development, deployment, and use of plan-
ning systems. For each phase, we described the ob-
jective, the approaches, and the tools available for its
execution. In addition, we explained and highlighted
the need for formulating adequate planning models,
selecting suitable planning tools, production deploy-
ment, and activities typically taken for granted. We
also motivated and highlighted the need for prove-
nance in AI planning to collect and analyse data in
relevant phases. We also pointed out several open
challenges, which along with the application of our
life cycle on a case study and comparison with other
lifecycle models, are of interest for future work.
ACKNOWLEDGEMENTS
I am grateful to Ebaa Alnazer for the comments an
early draft of this paper. I thank Marco Aiello for the
insightful discussions.
REFERENCES
Alc, V., Prior, D., Onaindia, E., Borrajo, D., Fdez-Olivares,
J., and Quintero, E. (2012). PELEA: a Domain-
Independent Architecture for Planning, Execution and
Learning. In Scheduling and Planning Applications
woRKshop (SPARK).
Alnazer, E., Georgievski, I., Prakash, N., and Aiello, M.
(2022). A Role for HTN Planning in Increasing Trust
in Autonomous Driving. In IEEE International Smart
Cities Conference, pages 1–7.
Ambreen, T., Ikram, N., Usman, M., and Niazi, M.
(2018). Empirical research in requirements engineer-
ing: trends and opportunities. Requirements Engi-
neering, 23:63–95.
Asimov, I., Warrick, P. S., and Greenberg, M. H. (1984).
Machines that Think: The Best Science Fiction Stories
about Robots and Computers. H. Holt & Co.
Bosch, J., Holmstr
¨
om Olsson, H., and Crnkovic, I.
(2018). It takes three to tango: Requirement, out-
come/data, and AI driven development. In Hyryn-
salmi, S., Suominen, A., Jud, C., Wang, X., Bosch,
J., and M
¨
unch, J., editors, International Workshop on
Software-intensive Business: Start-ups, Ecosystems
and Platforms, volume 2305, pages 177–192.
Bosch, J., Holmstr
¨
om Olsson, H., and Crnkovic, I. (2021).
Engineering AI Systems: A Reseach Agenda, pages 1–
9. IGI Global.
Canal, G., Borgo, R., Coles, A., Drake, A., Huynh, D.,
Keller, P., Krivi
´
c, S., Luff, P., ain Mahesar, Q.,
Moreau, L., Parsons, S., Patel, M., and Sklar, E. I.
(2020). Building Trust in Human-Machine Partner-
ships. Computer Law & Security Review, 39:105489.
Chakraborti, T., Sreedharan, S., and Kambhampati, S.
(2020). The Emerging Landscape of Explainable AI
Planning and Decision Making.
Chien, S. and Morris, R. (2014). Space Applications of
Artificial Intelligence. AI Magazine, 35(4):3–6.
Gartner, Inc. (2020). Top Strategic Technology Trends
for 2021. www.gartner.com/en/newsroom/press-
releases/2020-10-19-gartner-identifies-the-top-
strategic-technology-trends-for-2021. Accessed:
January 25, 2023.
Georgievski, I. (2022). Towards Engineering AI Planning
Functionalities as Services. In Service-Oriented Com-
puting – ICSOC 2022 Workshops, Lecture Notes in
Computer Science. Springer International Publishing.
Georgievski, I. (2023). Conceptualising Software Develop-
ment Lifecycle for Engineering AI Planning Systems.
In IEEE/ACM International Conference on AI Engi-
neering – Software Engineering for AI. Extended Ab-
stract.
Software Development Life Cycle for Engineering AI Planning Systems
759

Georgievski, I. and Aiello, M. (2015). HTN planning:
Overview, comparison, and beyond. Artificial Intel-
ligence, 222(0):124–156.
Georgievski, I. and Aiello, M. (2016). Automated planning
for ubiquitous computing. ACM Computing Surveys,
49(4):63:1–63:46.
Georgievski, I. and Breitenb
¨
ucher, U. (2021). A Vision
for Composing, Integrating, and Deploying AI Plan-
ning Functionalities. In IEEE International Confer-
ence on Service-Oriented System Engineering, pages
166–171.
Ghallab, M., Nau, D. S., and Traverso, P. (2004). Auto-
mated planning: Theory & practice. Morgan Kauf-
mann Publishers Inc.
Grady, J. O., editor (2014). System Requirements Analysis.
Elsevier, second edition.
Green, A., Reji, B. J., Chris, C. M., Scala, E., Meneguzzi,
F., Rico, F. M., Stairs, H., Dolejsi, J., Magnaguagno,
M., and Mounty, J. (2019). Planning.Wiki - The AI
Planning & PDDL Wiki. Accessed: January 24, 2023.
Herschel, M., Diestelk
¨
amper, R., and Ben Lahmar, H.
(2017). A Survey on Provenance: What for? What
Form? What From? The VLDB Journal, 26(6):881–
06.
H
¨
oller, D., Behnke, G., Bercher, P., Biundo, S., Fiorino, H.,
Pellier, D., and Alford, R. (2020). HDDL: An Exten-
sion to PDDL for Expressing Hierarchical Planning
Problems. In AAAI Conference on Artificial Intelli-
gence, pages 9883–9891.
Karpas, E. and Magazzeni, D. (2020). Automated Planning
for Robotics. Annual Review of Control, Robotics, and
Autonomous Systems, 3(1):417–439.
Leymann, F. and Roller, D. (1997). Workflow-Based Ap-
plications. IBM Syst. J., 36(1):102–123.
Ma, T., Ferber, P., Huo, S., Chen, J., and Katz, M. (2020).
Online planner selection with graph neural networks
and adaptive scheduling. In AAAI Conference on Ar-
tificial Intelligence, volume 34, pages 5077–5084.
McCluskey, T. L., Vaquero, T. S., and Vallati, M. (2017).
Engineering Knowledge for Automated Planning: To-
wards a Notion of Quality. In Knowledge Capture
Conference. Association for Computing Machinery.
Muise, C., Pommerening, F., Seipp, J., and Katz, M. (2022).
PLANUTILS: Bringing Planning to the Masses. In
International Conference on Automated Planning and
Scheduling: System Demonstrations.
Munassar, N. M. A. and Govardhan, A. (2010). A com-
parison between five models of software engineer-
ing. International Journal of Computer Science Is-
sues, 7(5):94–101.
Myers, K. L. (1999). CPEF: A Continuous Planning and
Execution Framework. AI Magazine, 20:63–69.
Nau, D. S., Au, T. C., Ilghami, O., Kuter, U., Murdock,
J. W., Wu, D., and Yaman, F. (2003). SHOP2: An
HTN Planning System. Journal of Artificial Intelli-
gence Research, 20:379–404.
Nilsson, N. J. (1984). Shakey the Robot. Technical Note
323, SRI International’s Artificial Intelligence Center.
Olszewska, J. I. (2019). D7-R4: Software Development
Life-Cycle for Intelligent Vision Systems. In In-
ternational Joint Conference on Knowledge Discov-
ery, Knowledge Engineering and Knowledge Manage-
ment, pages 435–441. INSTICC, SciTePress.
Pellier, D. and Fiorino, H. (2018). PDDL4J: A Planning
Domain Description Library for Java. Journal of
Experimental and Theoretical Artificial Intelligence,
30(1):143–176.
Polyak, S. T. and Tate, A. (1998). Rationale in Planning:
Causality, Dependencies, and Decisions. The Knowl-
edge Engineering Review, 13(3):247–262.
Silva, J. R., Silva, J. M., and Vaquero, T. S. (2020). Formal
Knowledge Engineering for Planning: Pre and Post-
Design Analysis. In Vallati, M. and Kitchin, D., ed-
itors, Knowledge Engineering Tools and Techniques
for AI Planning, pages 47–65. Springer International
Publishing.
Studer, R., Benjamins, V. R., and Fensel, D. (1998). Knowl-
edge Engineering: Principles and Methods. Data &
Knowledge Engineering, 25(1–2):161–197.
van Lamsweerde, A. (2009). Requirements Engineering:
From System Goals to UML Models to Software Spec-
ifications. Wiley Publishing, 1st edition.
Vaquero, T. S., Silva, J. R., and Beck, J. C. (2011a). A
Conceptual Framework for Post-Design Analysis in
AI Planning Applications. In Workshop on Knowl-
edge Engineering for Planning and Scheduling, pages
109–116.
Vaquero, T. S., Silva, J. R., and Beck, J. C. (2011b). Acqui-
sition and Re-Use of Plan Evaluation Rrationales on
Post-Design. In Workshop on Knowledge Engineer-
ing for Planning and Scheduling, pages 15–22.
Vaquero, T. S., Silva, J. R., Tonidandel, F., and Christo-
pher Beck, J. (2013). itSIMPLE: Towards an Inte-
grated Design System for Real Planning Applications.
The Knowledge Engineering Review, 28(2):215–230.
Vulgarakis Feljan, A., Mohalik, S. K., Jayaraman, M. B.,
and Badrinath, R. (2015). SOA-PE: A service-
oriented architecture for Planning and Execution in
cyber-physical systems. In International Conference
on Smart Sensors and Systems, pages 1–6.
Weder, B., Barzen, J., Leymann, F., and Vietz, D. (2022).
Quantum software development lifecycle. In Quan-
tum Software Engineering, pages 61–83. Springer.
Wu, Y., Chen, M.-H., and Offutt, J. (2003). UML-Based
Integration Testing for Component-Based Software.
In International Conference on COTS-Based Software
Systems, pages 251–260.
Zaharia, M., Chen, A., Davidson, A., Ghodsi, A., Hong,
S. A., Konwinski, A., Murching, S., Nykodym, T.,
Ogilvie, P., Parkhe, M., et al. (2018). Accelerating the
machine learning lifecycle with MLflow. IEEE Data
Eng. Bull., 41(4):39–45.
ICSOFT 2023 - 18th International Conference on Software Technologies
760
