
Real-World Optimization Benchmark from Vehicle Dynamics:
Specification of Problems in 2D and Methodology for Transferring
(Meta-)Optimized Algorithm Parameters
Andr
´
e Thomaser
1,2 a
, Marc-Eric Vogt
1 b
, Thomas B
¨
ack
2 c
and Anna V. Kononova
2 d
1
BMW Group, Knorrstraße 147, Munich, Germany
2
LIACS, Leiden University, Niels Bohrweg 1, Leiden, The Netherlands
Keywords:
Parameter Tuning, CMA-ES, Vehicle Dynamics Design, Benchmarking, Exploratory Landscape Analysis,
Artificial Benchmarking Functions.
Abstract:
The algorithm selection problem is of paramount importance in achieving high-quality results while minimiz-
ing computational effort, especially when dealing with expensive black-box optimization problems. In this
paper, we address this challenge by using randomly generated artificial functions that mimic the landscape
characteristics of the original problem while being inexpensive to evaluate. The similarity between the artifi-
cial function and the original problem is quantified using Exploratory Landscape Analysis. We demonstrate
a significant performance improvement on five real-world vehicle dynamics problems by transferring the pa-
rameters of the Covariance Matrix Adaptation Evolution Strategy tuned to these artificial functions.
We provide a complete set of simulated values of braking distance for fully enumerated 2D design spaces
of all five real-world optimization problems. So, replication of our results and benchmarking directly on the
real-world problems is possible. Beyond the scope of this paper, this data can be used as a benchmarking set
for multi-objective optimization with up to five objectives.
1 INTRODUCTION
Optimization algorithms play a vital role in solv-
ing complex real-world problems in a variety of do-
mains, including engineering, finance, logistics, and
machine learning. Evaluating and comparing these
algorithms is critical to selecting the best approach
for a given (class of) problem(s). This means running
multiple full optimizations. Since real-world prob-
lems are often comparatively expensive, this can be
archived by running the different algorithms on stan-
dardized, well-defined benchmark problems. While
these benchmark problems, such as the black-box op-
timization benchmark suit (BBOB) (Hansen et al.,
2009), are inexpensive to evaluate, they often cannot
fully capture the intricacies and complexities present
in real-world scenarios. Randomly generated artifi-
cial functions can be used to create more similar prob-
lems (Long et al., 2022).
a
https://orcid.org/0000-0002-6210-8784
b
https://orcid.org/0000-0003-3476-9240
c
https://orcid.org/0000-0001-6768-1478
d
https://orcid.org/0000-0002-4138-7024
The Covariance Matrix Adaptation Evolution
Strategy (CMA-ES) (Hansen, 2016; Hansen and
Ostermeier, 1996) is a class of iterative heuris-
tic algorithms and is considered as state-of-the-
art in single objective, continuous black-box opti-
mization, with many successful real-world applica-
tions such as topology optimization (Fujii et al.,
2018) and hyperparameter optimization of neural net-
works (Loshchilov and Hutter, 2016). Many vari-
ants have been developed over the years. The task
of identifying and selecting the variant with the best
performance for a given problem is a key challenge
and is known as the algorithm selection problem
(ASP) (Rice, 1976).
In this paper, we present five real-world 2D op-
timization problems from vehicle dynamics (Sec-
tion 2). We have computed all possible combina-
tions of the two enumerated design parameters. Thus,
this set of values allows the replication of our results
and benchmarking directly on the real-world prob-
lems. In the next step, we generate many suitable
artificial functions and select the most similar ones
to each real-world problem in terms of Exploratory
Thomaser, A., Vogt, M., Bäck, T. and Kononova, A.
Real-World Optimization Benchmark from Vehicle Dynamics: Specification of Problems in 2D and Methodology for Transferring (Meta-)Optimized Algorithm Parameters.
DOI: 10.5220/0012158000003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 31-40
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
31

Landscape Analysis features (Section 3). These sim-
ilar functions are then used as a tuning reference to
which the parameters of the optimization algorithm
are tuned before being applied to the original expen-
sive real-world problem. As an optimization algo-
rithm, we use the modular CMA-ES implementation
with several different variants that can be combined
arbitrarily (Section 4). Finally, we compare the per-
formance on the 2D real-world problems of the tuned
CMA-ES parameters on the artificial functions and
BBOB functions with the directly tuned parameters
on the 2D real-world problems (Section 5).
2 REAL-WORLD PROBLEMS
2.1 Description and Objective
Vehicle dynamics control systems, such as the Anti-
lock Braking System (ABS) (Koch-D
¨
ucker and Pa-
pert, 2014), have revolutionized the automotive in-
dustry by enhancing vehicle safety and performance.
The ABS mitigates the risk of wheel lock-up during
braking, by adjusting the brake pressure to keep brake
slip within an optimal range. This reduces the braking
distance and allows the driver to maintain control and
steer the vehicle even in an emergency braking situa-
tion. The parameters of these control systems must be
carefully calibrated to achieve optimal performance
under different scenarios and vehicle settings.
An industry standard maneuver for evaluating
a vehicle’s braking performance is the emergency
straight-line full-stop braking maneuver with ABS
fully engaged (International Organization for Stan-
dardization, 2007). The maneuver consists of the fol-
lowing three phases (Figure 1):
• 1: Accelerate the vehicle to 103.5 km/h;
• 2: No acceleration or deceleration until 103 km/h;
• 3: Apply brakes until the vehicle stops.
The braking distance can be calculated as the in-
tegral of the vehicle’s longitudinal velocity over time
from v
s
= 100 km/h at time t
s
to v
e
= 0 km/h at time t
e
(Figure 1). The beginning of the braking process be-
tween 103 km/h and 100 km/h is not taken into ac-
count when calculating the braking distance to avoid
possible disturbances occurring at the beginning of
the braking process. According to ISO 21994:2007,
a measurement sequence for calculating the braking
distance consists of ten valid single measurements.
The braking distance y is defined as:
y =
1
10
10
∑
k=1
Z
t
e
t
s
v
k
(t) dt. (1)
v
s
v
e
t
s
t
e
Time t in s
0
20
40
60
80
100
Lateral velocity v
x
in km/h
1 2 3
Figure 1: An emergency straight-line full-stop braking
maneuver for calculating the braking distance from v
s
=
100 km/h to v
e
= 0 km/h (start time t
s
and end time t
e
).
2.2 Simulation Environment
The vehicle dynamics, driver, and environment are
simulated using a two-track model implemented in
Simulink (The MathWorks, Inc., 2015). The vehi-
cle dynamics part includes the mechanical vehicle and
the control systems. The mechanical vehicle is mod-
eled as a five-body model (car body and four wheels)
with 16 degrees of freedom and consists of the follow-
ing components: equation of motion, tires, drive train,
aerodynamics, suspension, steering, and braking. The
control system components are sensors, logic, and ac-
tuators. By virtually mapping the interaction between
these components, the simulation is able to represent
an integrated control system.
MF-Tyre/MF-Swift (Siemens Digital Industries
Software, 2020), which is based on Pacejka’s so-
called Magic Formula (Pacejka and Bakker, 1992), is
used to accurately simulate the steady-state and tran-
sient behavior of tires under slip conditions. The road
surface is described by a curved regular grid (CRG)
track (VIRES Simulationstechnologie GmbH, 2020),
which provides information about the road width and
elevation along a predefined reference line. CRG
tracks are able to model 3D roads in great detail while
keeping memory usage to a minimum. On a standard
workstation
1
, it takes about 15 minutes to simulate a
braking maneuver. To reduce the wall clock time, the
simulation is run in parallel on multiple computers.
2.3 Real-World Benchmark-Problems
There are two very important ABS control parame-
ters that have a huge impact on the braking distance,
referred to here as x
1
and x
2
. Each parameter has a
defined lower B
lb
and upper B
ub
bounds: x
1
∈ [−5, 6]
and x
2
∈ [−5, 4]. Furthermore, for x
1
and x
2
only a
1
HP Workstation Z4 G4 Intel Xeon W-2125
4.00GHz/4.50GHz 8.25MB 2666 4C 32GB DDR4-2666
ECC SDRAM
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
32

Table 1: Explaination of the vehicle settings.
Name Tires Vehicle Load
y1 High performance Partially loaded
y2 Medium performance Partially loaded
y3 Under performance Partially loaded
y4 High performance Fully loaded
y5 High performance Little loaded
set of values D
i
with a resolution of 0.1 as equal dis-
tance between the values is allowed. This means that
111 distinct values are possible for x
1
and 91 for x
2
.
The 2-dimensional input space D
2
= ×
2
i=1
D
i
is then
the corresponding cartesian product. Thus there are
10101 possible combinations for the two ABS param-
eters x
1
and x
2
.
By simulating every possible combination (brute
forcing) of the two ABS parameters, we can fully
learn the functional dependence between the two ABS
parameters and the resulting braking distance y(x).
Furthermore, in order to apply algorithms for contin-
uous input spaces, in the following we consider the
problem as quasi-continuous: given an input x ∈ R
2
within the lower and upper bounds, the correspond-
ing braking distance y(x) is determined by round-
ing x
1
and x
2
to the nearest data point within the 2-
dimensional input space D
2
= ×
2
i=1
D
i
.
In summary, the objective is to find a parameter
setting x that minimizes the simulated braking dis-
tance y(x), as defined by the equation (1):
minimize
x∈X
y(x), X = {x ∈ R
2
: B
lb
≤ x ≤ B
ub
}. (2)
Generally, an optimal parameter setting x
∗
is only
optimal for one vehicle setting. In this paper, we pro-
vide the data of five different vehicle settings. Here, a
setting consists of a vehicle load and a tire (Table 1).
Since we are interested in the distance to the
global optimum, all braking distances of a particular
vehicle setting i are specified as the distance in meters
to the corresponding optimum. Figure 2 shows the
distribution of the 10 101 data points for each real-
world problem yi. The data with additional Python
code for benchmarking has been made available on
our Zenodo repository (Thomaser et al., 2023a).
Note that minimizing the braking distance for
each vehicle setting is one objective. For each ve-
hicle setting respectively objective function, a differ-
ent parameter set (x
1
, x
2
) is optimal, and the objec-
tives are in conflict with each other. Therefore, the
provided data can be used for benchmarking multi-
objective optimization algorithms with up to five ob-
jectives. However, in this paper, we focus only on
single-objective optimization and do not investigate
the conflict between the different vehicle settings.
0.0 0.5 1.0 1.5 2.0 2.5
Distance to y
i, opt
in m
0
200
400
600
800
Count
y1
y2
y3
y4
y5
Figure 2: Distribution of the 10 101 data points for each of
the five vehicle settings yi (Table 1).
3 TUNING REFERENCES
3.1 Benchmark Functions
Benchmarking algorithms is an important practice
that facilitates the evaluation and comparison of al-
gorithm performance. A widely accepted bench-
mark suite for single-objective optimization prob-
lems is the Black-Box Optimization Benchmark
(BBOB) (Hansen et al., 2009).
In addition to the 24 BBOB functions, we
randomly generate 100 000 artificial functions in
2D. Therefore, we use the Python implementation
of (Long et al., 2022), which is based on (Tian et al.,
2020). The input space is the same as for the five real-
world problems yi, x
1
∈ [−5, 6], and x
2
∈ [−5, 4].
We use the instance-generating mechanism of the
BBOB function suite (Hansen et al., 2009) and con-
sider five instances of each function. We also ap-
ply the same mechanism four times to each of the
100000 randomly generated artificial functions to ob-
tain slightly different functions, that are simply ro-
tated and shifted relative to the original function.
Maximizing or minimizing a function has a huge im-
pact on the landscape from the point of view of an op-
timization algorithm, so we also consider the inverse
function (multiplied by -1) of each function. This re-
sults in a set of 1 000 000 different artificial functions.
3.2 Exploratory Landscape Analysis
To quantify high-level properties, such as global
structure or multi-modality, of the landscape of an
optimization problem we use Exploratory Landscape
Analysis (ELA) (Mersmann et al., 2011; Mersmann
et al., 2010). This allows us to compute the similar-
ity between two optimization problems. The ELA-
features can be computed primarily with a sample of
Real-World Optimization Benchmark from Vehicle Dynamics: Specification of Problems in 2D and Methodology for Transferring
(Meta-)Optimized Algorithm Parameters
33

Figure 3: Scatter plot of the two main PCA components
of the 50 ELA-features for the artificial functions (AF), the
BBOB functions, and the real-world problems yi.
points of the objective function. The pflacco pack-
age (Prager, 2023), which provides a native Python
implementation of the large collection of ELA fea-
tures in the flacco package (Kerschke and Trautmann,
2019). We consider only those ELA features that
can be computed cheaply without additional resam-
pling. This results in 55 individual features, which
are grouped in five sets: classical ELA (distribution,
level, meta) (Mersmann et al., 2011), information
content (Mu
˜
noz et al., 2015), dispersion (Lunacek
and Whitley, 2006), nearest better clustering (Preuss,
2012; Kerschke et al., 2015) and principal compo-
nent. Five features could not be computed for each
function and were discarded.
As a compromise between accuracy and compu-
tational effort in ELA, a sample size of 50 times
the dimensionality is recommended to classify the
BBOB functions with ELA features (Kerschke et al.,
2016). To increase the accuracy we use a Sobol’ de-
sign (Owen, 1998; Sobol’, 1967) with 1000 samples
(500 × 2). For equal weighting, the feature values are
min-max-scaled to [0, 1]. Overall, the feature calcula-
tion was successful for 99.5% of the randomly gener-
ated artificial functions. Reasons for unsuccessful cal-
culations are ‘not a number’ values as function values
or a flat fitness function.
A large number of considered features leads to re-
dundancy within the features (
ˇ
Skvorc et al., 2020).
Therefore, to remove redundant features and reduce
the dimensionality of the feature space, we perform
Principal Component Analysis (PCA) (Jolliffe, 1986).
With the requirement of a cumulative variance greater
than 0.999, the dimensionality of the feature space is
reduced to 31.
Furthermore, Figure 3 shows the position defined
by the two main components from the PCA for each
function considered. The BBOB functions cover only
a partial space. The space in between is filled with the
Table 2: Most similar BBOB function to each of the real-
world problems yi.
Name Most similar BBOB Function
y1 B
¨
uche-Rastrigin Function f
4
y2 B
¨
uche-Rastrigin Function f
4
y3 Weierstrass Function f
16
y4 Rastrigin Function f
3
y5 Rastrigin Function f
3
y1 y2 y3 y4
y5
y1
y2
y3
y4
y5
AF
sim, 1
AF
sim, 2
AF
sim, 3
BBOB
sim
Sphere
0 0.84 6.3 4.3 4.2
0.84 0 6.4 4.2 4.3
6.3 6.4 0 6 6
4.3 4.2 6 0 2.6
4.2 4.3 6 2.6 0
0.95 1.1 1 0.74 1.3
1.1 1.2 1.1 0.91 1.4
1.1 1.2 1.2 1 1.4
2 2 2.9 2.3 2.6
5.1 5.1 7.1 4.2 4.6
Figure 4: Similarity of the landscape (as defined in equa-
tion 3) of the five real-world problems yi (x-axis) to each
other, the Sphere function (BBOB function f
1
), the three
most similar artificial generated functions (AF
sim,i
) and the
most similar BBOB function (BBOB
sim
) for each of the
real-world problems.
randomly generated artificial functions. The different
vehicle settings of the real-world problem (Table 1)
are relatively widely scattered. This indicates dissim-
ilarities within the landscape of the vehicle settings.
Only y1 and y2 are relatively close to each other.
3.3 Similar Functions
Based on the reduced set of features produced by
PCA, we can quantify the similarity between two
problems p
1
and p
2
via the city-block distance d be-
tween their feature vectors F
p
1
and F
p
2
:
d(p
1
, p
2
) =
∑
i
|
F
p
1
,i
− F
p
2
,i
|
. (3)
Using equation 3, we compute the distances be-
tween the five real-world problems yi and other func-
tions. In the following, we examine the three most
similar randomly generated artificial functions for
each of the real-world problems, denoted as AF
sim, j
,
and for comparison also each the most similar BBOB
function and the Sphere function (Table 2). Figure 4
shows these distances, which range from 0.74 to 7.1.
We observe that the distance between y1 and y2
is relatively small with a value of 0.84, for compar-
ison the most similar BBOB function is for both the
B
¨
uche-Rastrigin function with a distance of 2.0 and
the distances to the other real-world problems y3, y4,
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
34

y5 are always greater than 4 (Figure 4). Thus y1 and
y2 can be considered as similar to each other, while
the other real-world problems are more dissimilar to
y1 and y2 and also to each other.
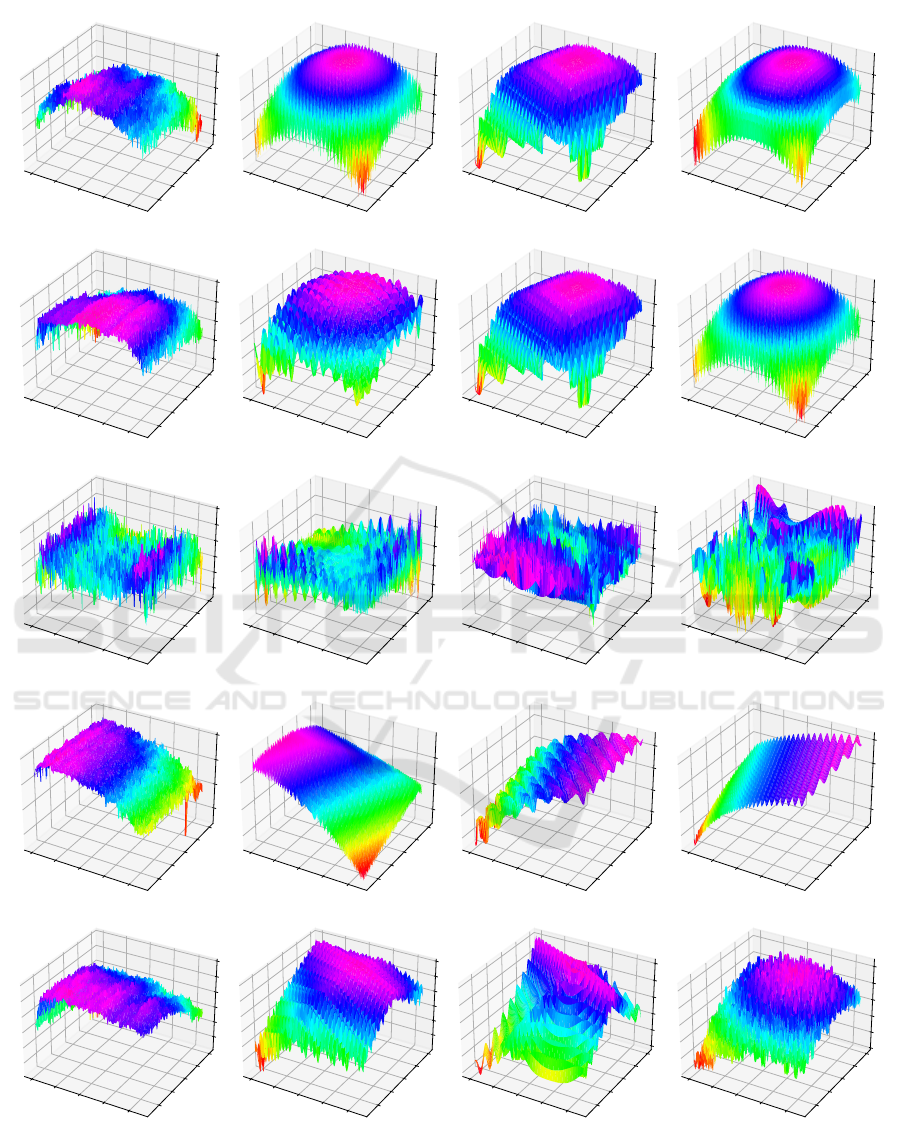
Within the randomly generated artificial func-
tions, the three most similar to each real-world prob-
lem yi all have a distance between 0.74 and 1.4. Fig-
ure 5 shows the actual landscape of real-world prob-
lems and these most similar artificial functions. Only
tiny changes within the straight-line braking maneu-
vers can influence the braking distance, thus all real-
world problems yi are overlaid with noise, which
leads to a highly multi-modal landscape. This noise
or multi-modality is also depicted by the similar arti-
ficially generated functions. Furthermore, we observe
from Figure 5 that, with the exception of y3 (under
performance tires), the real-world problems have a
global structure. This global structure is very similar
for y1 and y2 - as expected from the distance (Fig-
ure 4). The similar artificially generated functions
also manage to capture such a global structure.
The Sphere function is very dissimilar to the real-
world problems, especially to y3. This is not surpris-
ing, since the Sphere function is uni-modal and does
not capture the noise within the landscape of the real-
world problem. In the following, the Sphere function
will be used as an example of a dissimilar function for
comparison and validation.
4 TUNING CMA-ES
4.1 CMA-ES
The Covariance Matrix Adaptation Evolution Strat-
egy (CMA-ES) (Hansen, 2016; Hansen and Oster-
meier, 1996) is a class of iterative heuristic algo-
rithms for solving single objective, continuous opti-
mization problems. A population x of CMA-ES con-
sists of λ offspring and is sampled from a multivariate
normal distribution with mean value m
(g)
∈ R
n
, co-
variance matrix C
(g)
∈ R
n×n
and standard deviation
σ
(g)
∈ R
>0
:
x
(g+1)
k
∼ m
(g)
+ σ
(g)
N (0,C
(g)
) ∀ k = 1, ..., λ. (4)
In each generation g of the CMA-ES, the best µ indi-
viduals are selected from the population to compute
the new mean value m
(g+1)
with the given weights w
i
:
m
(g+1)
= m
(g)
+ c
m
µ
∑
i=1
w
i
(x
(g+1)
i:λ
− m
(g)
). (5)
Besides the landscape of the objective function,
the performance of CMA-ES on a specific optimiza-
tion problem is determined by the combination of
several parameters and variants (B
¨
ack et al., 2013).
In this paper, we use the modular CMA-ES imple-
mentation (de Nobel et al., 2021; van Rijn et al.,
2016) with several different variants that can be com-
bined arbitrarily. For a restart of CMA-ES, we con-
sider two variants: the population size is increased
by a factor (IPOP) (Auger and Hansen, 2005) or al-
ternated between a smaller and a larger population
(BIPOP) (Hansen, 2009). Table 3 contains the con-
sidered parameters and variants for tuning. The total
number of possible combinations of CMA-ES vari-
ants and parameters is 816480.
4.2 Meta-Algorithm
The task of finding the optimal parameters of an al-
gorithm for solving an optimization problem such as
the five real-world problems is difficult without fur-
ther knowledge. For example, CMA-ES has a large
number of different settings and variants that can be
selected. To solve this algorithm selection problem
(ASP) (Rice, 1976) an automatic parameter tuning
has been proposed as a second optimization prob-
lem besides solving the original problem (B
¨
ack, 1994;
Grefenstette, 1986).
Figure 6 illustrates the relationship between the
two optimization problems: solving the original prob-
lem and parameter tuning (Eiben and Smit, 2011).
The former optimization problem consists of the orig-
inal problem and the algorithm to find an optimal so-
lution to this problem. The latter consists of a meta-
algorithm to find optimal parameters for the algorithm
to solve the original problem. The so-called fitness
determines the quality of solutions for the original
problem and the utility the quality of the parameters
of the algorithm (Eiben and Smit, 2011).
When tuning the parameters of an optimization al-
gorithm with a given budget, the obtained parameters
are optimal only for that particular budget (Thomaser
et al., 2023b). To avoid tuning the parameters to a
specific budget, we use the area under the empirical
cumulative distribution function curve AUC to calcu-
late the utility of an optimization algorithm (Ye et al.,
2022). The higher the AUC, the better the perfor-
mance of the optimization algorithm, thus the objec-
tive is to maximize the AUC, or formulated as a min-
imization problem for the meta-algorithm: the objec-
tive is to minimize 1 − AUC.
The evaluation budget for CMA-ES is 2 000 and
we perform 100 individual optimization runs. To
compute the empirical cumulative distribution func-
tion curves, we consider 81 target values logarithmi-
cally distributed from 10
8
to 10
−8
. This procedure is
Real-World Optimization Benchmark from Vehicle Dynamics: Specification of Problems in 2D and Methodology for Transferring
(Meta-)Optimized Algorithm Parameters
35
x
1
x
2
y1
x
1
x
2
AF_17523_4
x
1
x
2
AF_27980_4
x
1
x
2
AF_83649_0_m
x
1
x
2
y2
x
1
x
2
AF_4612_4
x
1
x
2
AF_27980_4
x
1
x
2
AF_17523_4
x
1
x
2
y3
x
1
x
2
AF_9605_0_m
x
1
x
2
AF_60946_2_m
x
1
x
2
AF_3403_3_m
x
1
x
2
y4
x
1
x
2
AF_58701_4
x
1
x
2
AF_41100_0
x
1
x
2
AF_35436_4_m
x
1
x
2
y5
x
1
x
2
AF_37015_4
x
1
x
2
AF_8612_4
x
1
x
2
AF_34338_4
Figure 5: Landscape of the five 2d real-world problems yi and the three most similar artificial functions (AF) to each (Figure 4).
The objective is minimization, the axes are shown inverted, thus pink indicates better solutions and red worse.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
36
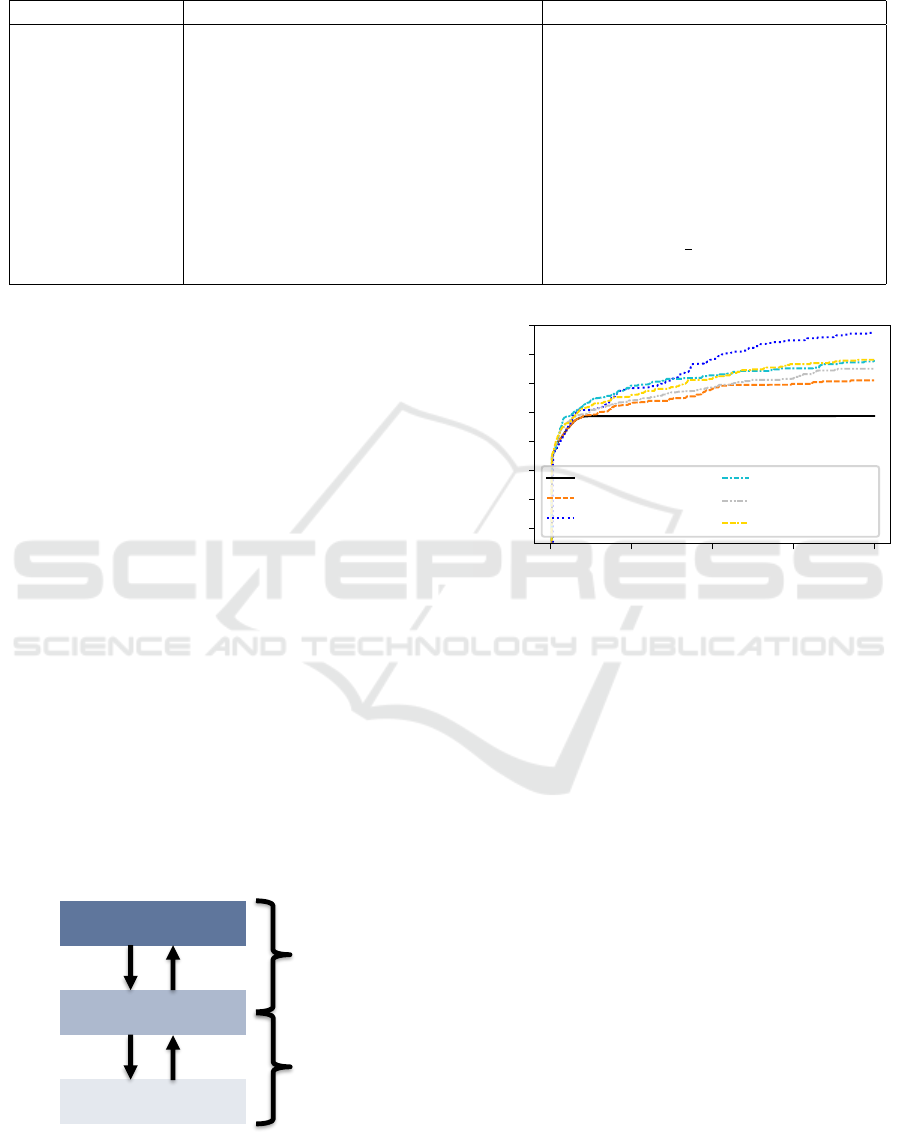
Table 3: Parameters and variants of CMA-ES with their value space for parameter tuning (de Nobel et al., 2021; van Rijn
et al., 2016).
Hyperparameter Description Space
λ Number of children derived from parents {4,6,..,20}
µ
r
Ratio of parents selected from population {0.2,0.3,..,0.8}
σ
0
Initial standard deviation {0.1,0.2,..,0.9}
Bound correction Correction if individual out of bounds {saturate, unif, COTN, toroidal, mirror}
Active update Covariance matrix update variation {on, off}
Elitism Strategy of the evolutionary algorithm {(µ, λ), (µ + λ)}
Mirrored sampling Mutations are the mirror image of another {on, off}
Orthogonal Orthogonal sampling {on, off}
Threshold Length threshold for mutation vectors {on, off}
Weights Weights for recombination {default, equal,
1
2
λ
}
Restart Local restart of CMA-ES {off, IPOP, BIPOP}
used to calculate the utility of a CMA-ES configura-
tion during parameter tuning and final validation.
To tune the parameters and select the best com-
bination of variants of CMA-ES, we use SMAC3
(Version 2.0.0) (Lindauer et al., 2022) as the meta-
algorithm. We use the default configuration of SMAC
with an evaluation budget of 1 000 and perform three
full-parameter tuning runs on each tuning reference
and real-world problem.
5 TUNING RESULTS
We tune CMA-ES individually on each of the five
real-world problems yi and on the three most simi-
lar randomly generated artificial functions (Figure 5).
Then, the best derived configuration from each pa-
rameter tuning run is validated on the real-world prob-
lem.
Figure 7 shows the Empirical Cumulative Distri-
bution Function for different CMA-ES configurations
on the real-world problem y1. We compared the re-
sults with the default CMA-ES configuration and the
CMA-ES with IPOP enabled. By simply enabling
Meta-Algorithm
Algorithm
Tuning Reference
problem
solving
parameter
tuning
algorithm
quality
solution
quality
optimize
optimize
Figure 6: Solving the original problem and parameter tun-
ing as two different optimization problems.
0 500 1000 1500 2000
Evaluation budget
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Fraction of runs + targets
default CMA-ES
IPOP CMA-ES
tuned on y1
tuned on AF
sim, 1
tuned on AF
sim, 2
tuned on AF
sim, 3
Figure 7: Empirical Cumulative Distribution Function for
different CMA-ES configurations on the real-world prob-
lem y1 that solved the problem within the budget given by
the x-axis.
IPOP, the performance increases with higher budgets.
The default CMA-ES stagnates because it does not
restart. Not surprisingly, the best performing con-
figuration is the CMA-ES configuration tuned to y1,
which almost always solves the optimization problem
within a budget of 2 000 evaluations. It is important
to note that configurations tuned to a similar artificial
function improve the performance compared not only
to the default configuration but also to the CMA-ES
with IPOP enabled.
The parameter tuning and the validation vary
slightly due to random effects within the optimization
of SMAC and CMA-ES. Therefore, we perform three
parameter tuning runs on each problem and then val-
idate each of the derived configurations on the five
real-world problems yi with three individual valida-
tion runs. Figure 8 summarizes the results as the aver-
age of the three validation runs. Not surprisingly, the
IPOP CMA-ES always outperforms the pure default
configuration of the CMA-ES without restart. The
parameter configuration tuned to a real-world prob-
Real-World Optimization Benchmark from Vehicle Dynamics: Specification of Problems in 2D and Methodology for Transferring
(Meta-)Optimized Algorithm Parameters
37

on y1 on y2 on y3 on y4 on y5
default
IPOP
tuned on y1
tuned on y2
tuned on y3
tuned on y4
tuned on y5
tuned on AF
sim, 1
tuned on AF
sim, 2
tuned on AF
sim, 3
tuned on BBOB
sim
tuned on Sphere
0.3 0.31 0.41 0.27 0.4
0.24 0.17 0.31 0.12 0.35
0.15 0.16 0.38 0.35 0.26
0.2 0.11 0.31 0.25 0.29
0.24 0.16 0.28 0.12 0.35
0.26 0.17 0.31 0.094 0.37
0.18 0.15 0.44 0.39 0.15
0.19 0.11 0.38 0.14 0.3
0.23 0.19 0.35 0.11 0.33
0.19 0.13 0.39 0.2 0.34
0.26 0.17 0.32 0.2 0.33
0.26 0.2 0.36 0.2 0.35
Figure 8: Utility (1 − AUC) of the default and IPOP CMA-
ES configuration and the CMA-ES configurations tuned to
different functions (y-axis) when validating them on the five
real-world problems yi (x-axis). The smaller the value, the
better is the performance of the CMA-ES configuration.
lem always performs best when validated again on the
same real-world problem.
In agreement with the similarity between two
problems (Figure 4), transferring CMA-ES configu-
rations tuned to one of the similar real-world prob-
lems y1 to y2 and transferring them to the other does
indeed improve performance. Transferring the more
dissimilar real-world problems y4 to y5 and vice versa
does not improve performance compared to the IPOP
CMA-ES.
CMA-ES configurations tuned on similar artifi-
cial functions (AF) can almost always beat or com-
pete with the IPOP CMA-ES. Thus, tuning on similar
functions improves the performance on the original
optimization problem. Only for y3, IPOP CMA-ES is
always better than the CMA-ES configurations tuned
on the similar artificial functions.
The second most similar artificial function AF
sim,2
is the same function for y1 and y2 (Figure 5) and
therefore we get the same three tuned configurations.
The performance of these three tuned configurations
on AF
sim,2
is comparatively worse than the configura-
tions tuned to AF
sim,1
and AF
sim,3
when validated on
y1 and y2. The reason for this is the second parameter
tuning run, where the obtained best configuration of
CMA-ES has no restart variant enabled. This leads to
the average poor performance of AF
sim,2
. Thus, restart
is not necessary for every function, even if this func-
tion is multimodal and very similar in terms of ELA
characteristics. In the future, to obtain a more robust
tuned configuration of CMA-ES, the parameter tun-
ing of CMA-ES should be performed on more than
one similar artificial function.
The comparison with the most similar BBOB
function shows that tuning on the more similar artifi-
cial functions leads to better results. Thus, generating
artificial functions as new tuning references instead of
selecting a similar BBOB function is recommended
and worth the effort to improve the performance of
CMA-ES.
Finally, tuning on the Sphere function also im-
proves the performance of CMA-ES compared to the
default configuration of CMA-ES and also competes
with the IPOP CMAES. Tuning CMA-ES even on
a dissimilar function can improve the performance.
This confirms the results from (Thomaser et al.,
2023b).
In summary, our results show that tuning improves
the performance of CMA-ES. Moreover, the more
similar two optimization problems are in terms of
ELA features, the better the performance when the
tuned configuration of CMA-ES is transferred to the
other optimization problem.
6 CONCLUSION
In this paper, we compared CMA-ES configurations
tuned to five different real-world 2D vehicle dynam-
ics problems and compared the performance to CMA-
ES configurations tuned to other functions, referred
to as tuning references. We used Exploratory Land-
scape Analysis to quantify the similarity between two
optimization problems and to select the most similar
optimization problems from approximately 1000000
randomly generated artificial functions. The visual
appearance of the most similar artificial functions is
very similar to the original real-world problems.
Moreover, the CMA-ES configuration tuned to
the similar artificial functions improved the perfor-
mance on the real-world problems compared to the
default CMA-ES configuration, IPOP CMA-ES, and
also to CMA-ES configurations tuned to BBOB func-
tions. This encourages further pursuit of the approach
of transferring algorithm parameters tuned to similar
problems.
Future research should investigate whether the ad-
ditional computational effort for computing the ELA
features and tuning the parameters is justified. An-
other topic of future research is to investigate whether
the parameter tuning on several similar functions can
increase the robustness of the CMA-ES configuration
when transferred to the original optimization prob-
lem.
ACKNOWLEDGEMENTS
This paper was written as part of the project newAIDE
under the consortium leadership of BMW AG with
the partners Altair Engineering GmbH, divis intelli-
gent solutions GmbH, MSC Software GmbH, Techni-
cal University of Munich, TWT GmbH. The project is
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
38

supported by the Federal Ministry for Economic Af-
fairs and Climate Action (BMWK) on the basis of a
decision of the German Bundestag.
REFERENCES
Auger, A. and Hansen, N. (2005). A Restart CMA Evo-
lution Strategy With Increasing Population Size. In
Proceedings of the IEEE Congress on Evolutionary
Computation, volume 2, pages 1769–1776.
B
¨
ack, T. (1994). Parallel Optimization of Evolutionary Al-
gorithms. In Goos, G., Hartmanis, J., Leeuwen, J.,
Davidor, Y., Schwefel, H.-P., and M
¨
anner, R., editors,
Parallel Problem Solving from Nature — PPSN III,
volume 866 of Lecture Notes in Computer Science,
pages 418–427. Springer Berlin Heidelberg, Berlin,
Heidelberg.
B
¨
ack, T., Foussette, C., and Krause, P. (2013). Contempo-
rary Evolution Strategies. Natural Computing Series.
Springer Berlin, Heidelberg, Berlin, Heidelberg, 1st
ed. edition.
de Nobel, J., Vermetten, D., Wang, H., Doerr, C., and B
¨
ack,
T. (2021). Tuning as a Means of Assessing the Bene-
fits of New Ideas in Interplay with Existing Algorith-
mic Modules. Technical report.
Eiben, A. E. and Smit, S. K. (2011). Parameter tuning for
configuring and analyzing evolutionary algorithms.
Swarm and Evolutionary Computation, 1(1):19–31.
Fujii, G., Takahashi, M., and Akimoto, Y. (2018). CMA-
ES-based structural topology optimization using a
level set boundary expression-Application to optical
and carpet cloaks. Computer Methods in Applied Me-
chanics and Engineering, 332:624–643.
Grefenstette, J. (1986). Optimization of Control Parameters
for Genetic Algorithms. IEEE Transactions on Sys-
tems, Man, and Cybernetics, 16(1):122–128.
Hansen, N. (2009). Benchmarking a BI-Population CMA-
ES on the BBOB-2009 Function Testbed. In Pro-
ceedings of the 11th Annual Conference Compan-
ion on Genetic and Evolutionary Computation Con-
ference: Late Breaking Papers, ACM Conferences,
pages 2389–2396, New York, NY, USA. Association
for Computing Machinery.
Hansen, N. (2016). The CMA Evolution Strategy: A Tuto-
rial. Technical report.
Hansen, N., Finck, S., Ros, R., and Auger, A. (2009).
Real-Parameter Black-Box Optimization Benchmark-
ing 2009: Noiseless Functions Definitions. Technical
Report RR-6829, INRIA.
Hansen, N. and Ostermeier, A. (1996). Adapting Arbitrary
Normal Mutation Distributions in Evolution Strate-
gies: The Covariance Matrix Adaptation. In Proceed-
ings of the IEEE International Conference on Evolu-
tionary Computation, pages 312–317.
International Organization for Standardization (2007). ISO
21994:2007 - Passenger cars - Stopping distance
at straight-line braking with ABS - Open-loop test
method.
Jolliffe, I. T. (1986). Principal Component Analysis.
Springer eBook Collection Mathematics and Statis-
tics. Springer, New York, NY.
Kerschke, P., Preuss, M., Wessing, S., and Trautmann, H.
(2015). Detecting Funnel Structures by Means of Ex-
ploratory Landscape Analysis. In Proceedings of the
2015 Annual Conference on Genetic and Evolutionary
Computation, ACM Digital Library, pages 265–272,
New York, NY. Association for Computing Machin-
ery.
Kerschke, P., Preuss, M., Wessing, S., and Trautmann, H.
(2016). Low-Budget Exploratory Landscape Analysis
on Multiple Peaks Models. In Neumann, F., editor,
Proceedings of the Genetic and Evolutionary Compu-
tation Conference, ACM Digital Library, pages 229–
236, New York, NY, USA. Association for Computing
Machinery.
Kerschke, P. and Trautmann, H. (2019). Comprehen-
sive Feature-Based Landscape Analysis of Continu-
ous and Constrained Optimization Problems Using the
R-Package Flacco. In Bauer, N., Ickstadt, K., L
¨
ubke,
K., Szepannek, G., Trautmann, H., and Vichi, M., edi-
tors, Applications in Statistical Computing, Studies in
Classification, Data Analysis, and Knowledge Orga-
nization, pages 93–123. Springer.
Koch-D
¨
ucker, H.-J. and Papert, U. (2014). Antilock brak-
ing system (ABS). In Reif, K., editor, Brakes, Brake
Control and Driver Assistance Systems, Bosch profes-
sional automotive information, pages 74–93. Springer
Vieweg, Wiesbaden.
Lindauer, M., Eggensperger, K., Feurer, M., Biedenkapp,
A., Deng, D., Benjamins, C., Ruhkopf, T., Sass,
R., and Hutter, F. (2022). SMAC3: A Versatile
Bayesian Optimization Package for Hyperparameter
Optimization. Journal of Machine Learning Research,
23(54):1–9.
Long, F. X., van Stein, B., Frenzel, M., Krause, P., Gitterle,
M., and B
¨
ack, T. (2022). Learning the Characteris-
tics of Engineering Optimization Problems with Ap-
plications in Automotive Crash. In Proceedings of the
Genetic and Evolutionary Computation Conference,
GECCO ’22, New York, NY, USA. Association for
Computing Machinery.
Loshchilov, I. and Hutter, F. (2016). CMA-ES for Hyperpa-
rameter Optimization of Deep Neural Networks.
Lunacek, M. and Whitley, D. (2006). The Dispersion Met-
ric and the CMA Evolution Strategy. In Proceedings
of the 8th Annual Conference on Genetic and Evolu-
tionary Computation, page 477. Association for Com-
puting Machinery.
Mersmann, O., Bischl, B., Trautmann, H., Preuss, M.,
Weihs, C., and Rudolph, G. (2011). Exploratory Land-
scape Analysis. In Lanzi, P. L., editor, Proceedings of
the 13th Annual Conference on Genetic and Evolu-
tionary Computation, ACM Conferences, pages 829–
836, New York, NY, USA. ACM.
Mersmann, O., Preuss, M., and Trautmann, H. (2010).
Benchmarking Evolutionary Algorithms: Towards
Exploratory Landscape Analysis. In Schaefer, R.,
Cotta, C., Kołodziej, J., and Rudolph, G., editors, Par-
allel Problem Solving from Nature, PPSN XI, Lecture
Real-World Optimization Benchmark from Vehicle Dynamics: Specification of Problems in 2D and Methodology for Transferring
(Meta-)Optimized Algorithm Parameters
39

Notes in Computer Science, pages 73–82. Springer,
Berlin.
Mu
˜
noz, M. A., Kirley, M., and Halgamuge, S. K. (2015).
Exploratory Landscape Analysis of Continuous Space
Optimization Problems Using Information Content.
IEEE Transactions on Evolutionary Computation,
19(1):74–87.
Owen, A. B. (1998). Scrambling Sobol’ and Niederreiter–
Xing Points. Journal of Complexity, 14(4):466–489.
Pacejka, H. B. and Bakker, E. (1992). THE MAGIC FOR-
MULA TYRE MODEL. Vehicle System Dynamics,
21(sup001):1–18.
Prager, R. P. (2023). pflacco: The R-package flacco in na-
tive Python code. https://github.com/Reiyan/pflacco.
Preuss, M. (2012). Improved Topological Niching for Real-
Valued Global Optimization. In Applications of Evo-
lutionary Computation, volume 7248 of Lecture Notes
in Computer Science, pages 386–395. Springer, Berlin
and Heidelberg.
Rice, J. R. (1976). The Algorithm Selection Problem. In
Rubinoff, M. and Yovits, M. C., editors, Advances in
Computers, volume 15, pages 65–118. Elsevier Sci-
ence & Technology, Saint Louis.
Siemens Digital Industries Software (2020). Tire Sim-
ulation & Testing. https://www.plm.automation.
siemens.com/global/en/products/simulation-test/
tire-simulation-testing.html.
ˇ
Skvorc, U., Eftimov, T., and Koro
ˇ
sec, P. (2020). Under-
standing the problem space in single-objective numer-
ical optimization using exploratory landscape analy-
sis. Applied Soft Computing, 90.
Sobol’, I. M. (1967). On the distribution of points in a cube
and the approximate evaluation of integrals. Com-
putational Mathematics and Mathematical Physics,
7(4):86–112.
The MathWorks, Inc. (2015). Simulink. https://www.
mathworks.com/.
Thomaser, A., Vogt, M.-E., B
¨
ack, T., and Kononova, A. V.
(2023a). Real-world Optimization Benchmark from
Vehicle Dynamics - Data and Code. https://doi.org/
10.5281/zenodo.8307853.
Thomaser, A., Vogt, M.-E., Kononova, A. V., and B
¨
ack, T.
(2023b). Transfer of Multi-objectively Tuned CMA-
ES Parameters to a Vehicle Dynamics Problem. In
Emmerich, M., Deutz, A., Wang, H., Kononova, A. V.,
Naujoks, B., Li, K., Miettinen, K., and Yevseyeva, I.,
editors, Evolutionary Multi-Criterion Optimization,
pages 546–560, Cham. Springer Nature Switzerland.
Tian, Y., Peng, S., Zhang, X., Rodemann, T., Tan, K. C.,
and Jin, Y. (2020). A Recommender System for
Metaheuristic Algorithms for Continuous Optimiza-
tion Based on Deep Recurrent Neural Networks. IEEE
Transactions on Artificial Intelligence, 1(1):5–18.
van Rijn, S., Wang, H., van Leeuwen, M., and B
¨
ack, T.
(2016). Evolving the structure of Evolution Strate-
gies. In 2016 IEEE Symposium Series on Computa-
tional Intelligence (SSCI), pages 1–8.
VIRES Simulationstechnologie GmbH (2020). Opencrg.
https://www.asam.net/standards/detail/opencrg/.
Ye, F., Doerr, C., Wang, H., and B
¨
ack, T. (2022). Auto-
mated Configuration of Genetic Algorithms by Tun-
ing for Anytime Performance. IEEE Transactions on
Evolutionary Computation, 26(6):1526–1538.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
40
