
On Selecting Optimal Hyperparameters for Reinforcement Learning
Based Robotics Applications: A Practical Approach
Ignacio Fidalgo
a
, Guillermo Villate
b
, Alberto Tellaeche
c
and Juan Ignacio Vázquez
d
Computer Science, Electronics and Communication Technologies, University of Deusto,
Avenida de las Universidades 24, Bilbao, Spain
Keywords: Intelligent Robotics, Reinforcement Learning, Hyperparameters.
Abstract: Artificial intelligence (AI) is increasingly present in industrial applications and, in particular, in advanced
robotics, both industrial and mobile. The main problem of these type of applications is that they use complex
AI algorithms, in which it is necessary to establish numerous hyperparameters to achieve an effective training
of the same. In this research, we introduce a pioneering approach to reinforcement learning in the realm of
industrial robotics, specifically targeting the UR3 robot. By integrating advanced techniques like Deep Q-
Learning and Proximal Policy Optimization, we've crafted a unique motion planning framework. A standout
novelty lies in our application of the Optuna library for hyperparameter optimization, which, while not
necessarily enhancing the robot's end performance, significantly accelerates the convergence to the optimal
policy. This swift convergence, combined with our comprehensive analysis of hyperparameters, not only
streamlines the training process but also paves the way for efficient real-world robotic applications. Our work
represents a blend of theoretical insights and practical tools, offering a fresh perspective in the dynamic field
of robotics.
1 INTRODUCTION
Robotics in general and industrial robotics in
particular are one of the sectors that has undergone a
major technological revolution over the last decade.
With the parallel development of the digitalisation of
industrial processes (Savastano et al., 2019), the
explosion of the use of artificial intelligence in
industry (Peres et al., 2020), and the irruption of
collaborative robots (Sherwani et al., 2020), the way
of conceiving the use of robots in industry has
changed radically. In our opinion, two main new
trends can be identified when designing applications,
which are as follows:
Flexibility and adaptability of robotic
applications to new conditions (new product,
change of operating conditions, etc.): In this case,
it is necessary to provide the robot with the
capacity to adapt to variations in the base process,
with the capacity to adjust parameters and
a
https://orcid.org/0000-0002-0951-2307
b
https://orcid.org/0009-0001-0783-7984
c
https://orcid.org/0000-0001-9236-1951
d
https://orcid.org/0000-0001-6385-5717
operation offline, or in simulation, being of vital
importance in order not to lose production time.
Related to the previous point, current robotics
must adapt to operate in unstructured
environments by intensively applying artificial
intelligence for the automatic recognition of parts
even when there are occlusions, human-robot
collaboration, or for the autonomous learning of
new tasks using simulation environments.
In this context, to be able to design this kind of
robotic applications, it is necessary to make intensive
use of artificial intelligence, mainly using Deep
Learning (Goodfellow et al., n.d.) and Reinforcement
Learning techniques (Sutton & Barto, 2020). Both
techniques use in their different algorithms neural
networks of varying complexity depending on the
application, which require an effective adjustment of
hyperparameters for their correct training.
The work presented in 2013 (Kober et al., 2013)
already established a formal definition of the main
Fidalgo, I., Villate, G., Tellaeche, A. and Vázquez, J.
On Selecting Optimal Hyperparameters for Reinforcement Learning Based Robotics Applications: A Practical Approach.
DOI: 10.5220/0012158200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 123-130
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
123
aspects of RL, and of the problems and advantages
arising from its application in a field as specific as
robotics.
More recently, the state of the art in
Reinforcement learning presents some interesting
works related to creating and obtaining robot
trajectories autonomously. For example, (Shahid et
al., n.d.) presents an RL-based approach, using
Proximal Policy Optimization (PPO), for the
manipulation of parts. In another work, Bézier curves
are used to obtain motion planning in autonomous
industrial robots (Scheiderer et al., 2019).
In another work presented in 2019, the authors
use Deep Reinforcement Learning to obtain the
planning of robot trajectories, focusing mainly on the
optimisation of reward functions (Xie et al., 2019).
Finally, another interesting work can be found in
(Bhuiyan et al., 2023), where the authors use distance
sensors to gather environmental measurements
necessary for the RL algorithm.
The use case presented in this paper is based on
the use of Reinforcement Learning for the
development of an optimal path planner for an
industrial robot UR3. Therefore, the following
sections of the paper will particularise the state of the
art and the problem definition to this type of machine
learning algorithms.
Finally, it is interesting to mention three papers,
published in the last three years, which address
problems similar to the use case presented in this
research work, but which do not use optimisation
techniques for the configuration of the best parameter
values in the algorithm used.
In (Ha et al., 2020) they use a multi-agent
reinforcement learning algorithm, using a soft actor
critic (SAC) algorithm with considerable internal
complexity. In a second paper (Li et al., 2022), they
also use an algorithm based on the actor-critic
scheme, automatically adjusting and limiting entropy.
Last but not least, in (Zhou et al., 2021) they use
what has been defined as residual reinforcement
learning. In all three works, the aim is to develop a
motion planner for robotics, and the approach
followed has been to use RL with more or less
complex algorithms.
In our research work, the aim is to obtain similar
performance to the aforementioned works, but using
a standard algorithm, such as PPO, and focusing the
effort on the optimisation of the parameters of this
algorithm.
2 REINFORCEMENT LEARNING
ALGORITHMS AND
HYPERPARAMETERS
Reinforcement Learning (RL) algorithms are a third
group of algorithms in the machine learning branch,
along with supervised and unsupervised learning
(clustering). Unlike these two more common groups
of algorithms, RL algorithms learn by trial and error.
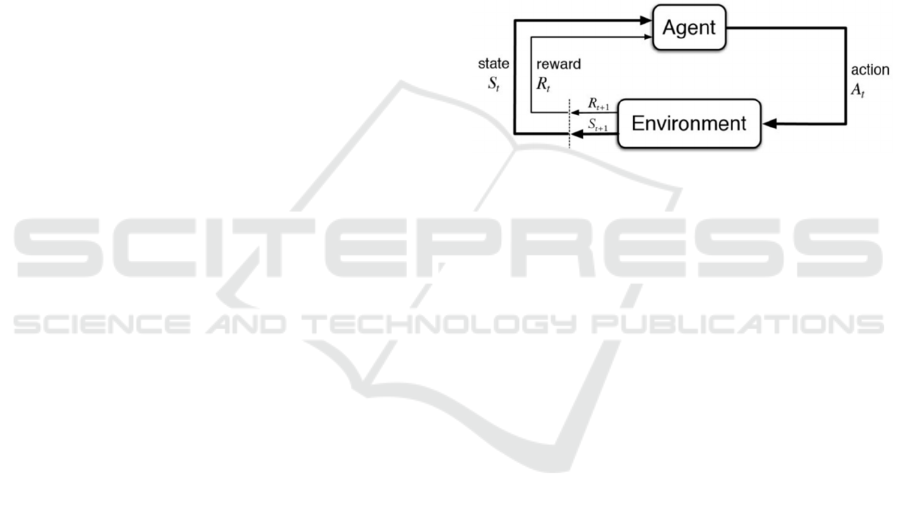
The agent to be trained interacts with the environment
by executing actions and subsequently receives a
reward signal, as well as observations (states) about
the environment. This process is sequential and time-
dependent. A schematic of how this works can be
seen in Figure 1.
Figure 1: Schema of a RL algorithm (Shweta Bhatt, n.d.)
For a process to be solved by RL techniques, it is
necessary that the process follows a Markov decision
process (MDP), as stated in (Sutton & Barto, 2020).
A MDP is a Markov process in which the
environment provides a reward and allows decisions
to be taken. Mathematically, a MDP is a tuple
〈
𝑆,𝐴,𝑃,𝑅,𝛾
〉
where:
S is a finite set or continuous value for states.
A is a finite set or continuous value for
actions
P is a state transition probability matrix
𝑃
=𝑃𝑟𝑜𝑏
𝑆
=𝑠
| 𝑆
=𝑠,𝐴
(1)
R is the reward function
𝑅
=𝐸𝑥𝑝𝑒𝑐𝑡
𝑅
| 𝑆
=𝑠,𝐴
(2)
γ is the discount factor 𝛾 𝜖
0,1
The main characteristic of this type of
environments is that for its learning, it depends only
on the current state of the problem, ignoring its
history or previous states. The objective is to obtain
the maximum reward possible for the episode, with
means to optimize actions in the problem given the
current state. This fact is defined by Bellman's
equation of optimality for the action-value function
(Lapan, 2018; Sutton & Barto, 2020)
Given the action-value function:
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
124
𝑞
(
𝑠,𝑎
)
=𝑅
+
𝛾𝑃
𝜋
(
𝑎
|
𝑠
)
𝑞
(𝑠
,𝑎′)
(3)
The Bellman´s equation of optimality for the
action value function is:
𝑞
∗
(
𝑠,𝑎
)
= 𝑚𝑎𝑥
𝑞
(𝑠,𝑎) (4)
Where π represents the optimal policy, the
optimal behavioural function for the agent to solve
the environment.
Many of the RL environments to be solved
present continuous observation spaces of the
environment, i.e., the different observable states of
the environment take infinite continuous values
bounded between a maximum and minimum value.
To solve this problem, current algorithms use neural
networks to obtain the non-linear functions of the
policy and the value of the states. Two of the most
widely used algorithms that use this approach are
Deep Q-Learning (DQN) (Mnih et al., 2013) and PPO
(Schulman et al., 2017). Detailed technical
implementations can be found in the references cited
for each of these algorithms.
2.1 The Importance of
Hyperparameters
The following table presents the implementation
steps of the DQN algorithm:
Table 1: DQN algorithm implementation (Lapan, 2018).
1.
Initialize parameters for Q(s,a) and Q^(s,a) with
random weights, ε=1.0 and empty the replay
buffer with N samples
2.
With prob. Ε, select a random action a, otherwise
a= 𝑎𝑟𝑔𝑚𝑎𝑥
𝑄
,
3.
Execute action a in the environment and observe
the reward r and the next state s’
4. Store transitions (s,a,r,s’) in the replay buffer
5.
Sample a random minibatch of transitions from
the replay buffer
6.
For every transition in the buffer, calculate target
y=r if the episode has ended at this step or 𝑦=
𝑟+𝛾𝑚𝑎𝑥
𝑄^(𝑠
,𝑎′) otherwise
7. Calculate loss 𝐿=(𝑄
,
−𝑦)
8.
Update Q(s,a) using the SGD algorithm (Bottou,
1991) minimizing the loss in respect to model
parameters
9.
Every M steps, copy network weights from Q(s,a)
to Q^(s,a)
10. Repeat from step 2 until convergence
As can be seen in table 1, the correct training and
operation of the algorithm depends on numerous
hyperparameters, some relating to the DQN algorithm
itself and others relating to the neural network used to
model the value function in this case. In our
experience, the hyperparameters that most influence
the learning of this algorithm are:
Policy: Neural network architecture for
estimating the problem value function.
Learning rate: The learning rate set for
policy training.
Buffer size: size of the replay buffer to
obtain an initial uncorrelated dataset for
policy training.
Batch size - Minibatch size for each gradient
update of the policy.
gamma: Discount factor to weight the
importance of future states.
Train frequency - Update frequency of the
neural network model of the policy.
Exploration fraction (ε): Exploration factor
for moving from exploration to exploitation
of results in the solution of the problem.
Exploration initial eps: Initial value of
exploration fraction.
Exploration final eps: Final value of the
exploration fraction.
In the case of the PPO algorithm, rooted in the
actor-critic model, offers a structured approach to
reinforcement learning, ensuring effective training
and robust performance. A closer examination of its
design reveals the intricate interplay of various
hyperparameters, each contributing uniquely to the
algorithm's efficacy.
The Policy defines the neural network
architectures for both estimating the problem's value
function (critic) and the policy function (actor). Its
design and complexity can significantly influence the
algorithm's ability to generalize and learn from the
environment.
The Learning Rate is pivotal in determining how
quickly the algorithm updates its knowledge. A high
learning rate might lead to rapid convergence but
risks overshooting the optimal solution, while a low
rate ensures more stable learning at the expense of
longer training times.
The number of steps to execute per environment
update influence the granularity of learning and the
responsiveness of the model to changes in the
environment.
Batch Size determines the number of experiences
used in each update, striking a balance between
computational efficiency and gradient accuracy.
On Selecting Optimal Hyperparameters for Reinforcement Learning Based Robotics Applications: A Practical Approach
125

The Gamma discount factor emphasizes the
importance of future rewards. A value closer to 1
gives more weight to long-term rewards, while a
lower value prioritizes immediate rewards.
The N Epochs represents the number of iterations
when optimizing the loss function, determining the
depth of refinement for each batch of experiences.
Lastly, the Clip Range and Clip Range vf ensure
that the updates to the policy and value functions
remain bounded. These parameters prevent drastic
changes that could destabilize learning by ensuring
that the policy doesn't change too much in a single
update.
Figure 2: Different rewards and problem solutions obtained
depending on hyperparameters.
In essence, the choice and tuning of these
hyperparameters are not mere technicalities but are
central to the algorithm's success. Their optimal
values can vary based on the specific problem and
environment, underscoring the importance of
systematic experimentation and tuning.
Figure 2 shows the difference in training
efficiency of a simple problem, in this case the
CartPole problem available in the Gymnasium
library (Gymnasium: A Standard API for
Reinforcement Learning, n.d.)., using DQN.
Depending on the training hyperparameters
established the reward evolution of the problem,
differs.
3 PROBLEM DESCRIPTION
The goal of the proposed research is to develop a
motion planner using RL techniques, enabling a UR3
robot to accurately position its tool anywhere within
the workspace, maintaining the correct orientation.
Following this objective, the motion planner's
design becomes paramount. It must address the
nuanced problem of determining a sequence of valid
configurations that guide the UR3 robot from its
current position to the desired location. In this
specific context, the challenge isn't about navigating
around external obstacles, but rather ensuring that the
robot avoids collisions with itself and the floor. The
primary input to the motion planner is the robot's
current configuration and the desired goal position
and orientation.
Additionally, information about the robot's
structure and the floor's geometry is essential to avoid
self and floor collisions. The output from the motion
planner is a sequence of configurations that the robot
should adopt to reach the desired goal without any
collisions. In this scenario, the motion planner,
underpinned by RL techniques, aims to navigate the
robot's own structure and the immediate environment,
ensuring smooth and safe movement while
maintaining the tool's precise orientation.
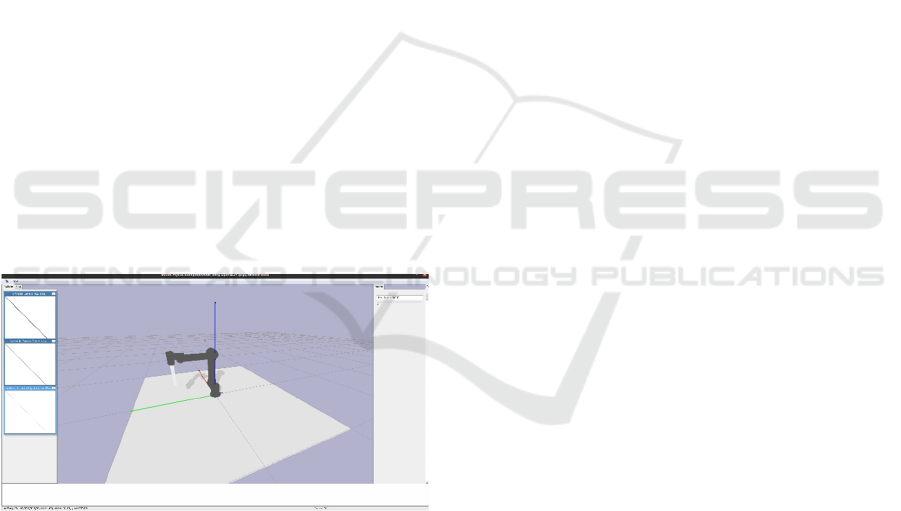
The following figures shows in detail the
simulation environment used for this problem, based
on the physics engine PyBullet (Coumans, n.d.).
This problem is defined with continuous
observation space of dimension 14 according to the
equation 5:
𝑂𝑏𝑠𝑆𝑝𝑎𝑐𝑒 =
(
𝑥,𝑦,𝑧,𝑜𝑋,𝑜𝑌,𝑜𝑍,𝑜𝑊,𝜃
,𝜃
,𝜃
,𝜃
,𝜃
,𝜃
,𝑐𝑜𝑙𝑙𝑖𝑠𝑖𝑜𝑛
)
(5)
Where x, y, z are the cartesian distances to the
target point, oX, oY, oZ, oW are the orientation
differences to the desired orientation at the target
point given in quaternions, θ
i
are the values of the
angles of the different joints and finally a collision
flag is included, in order to obtain valid trajectories.
Figure 3: Simulation environment (view 1).
The action space has 6 dimensions. Each of these
values are bounded between -1 and 1, using these
results per joint as a multiplicative factor of the angle
of movement per maximum step established for each
one of the joints (θ
max
). according to the equation 6:
𝐴
𝑐𝑡𝑆𝑝𝑎𝑐𝑒
=𝜃
(
𝛼
,𝛼
,𝛼
,𝛼
,𝛼
,𝛼
)
| 𝛼
𝜖
−1,1
(6)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
126
In the context of the UR3 robot's operation, these
values need to be translated into meaningful
commands. To achieve this, the float values are
scaled to match the permissible angle range of each
of the robot's joints. By doing so, each normalized
action value is converted into a joint angle between
-2π and 2π, allowing for direct command execution
by the robot.
The reward for this problem is defined using the
following algorithm:
Algorithm 1: Reward function.
Data: ObsSpace; p1, q1, collision
EnvironmentInf: p2, q2, prev_dist
if collision == 1 then
return -250
d (p1, p2) = euclidean_distance (p1, p2)
d (q1, q2) = 1−
〈
𝑞1,𝑞2
〉
if d (p1, p2) < 0.01 & d (q1, q2) < 0.01 then
return 300
∆d = prev_dist – d(p1, p2) -d(q1, q2)
prev_dist = d(p1, p2) + d(q1, q2)
return ∆d * 100
As the training progresses and the motion planner
refines its policy, these joint angle commands
collectively form a coherent and valid trajectory.
Once the training is complete, this trajectory
ensures that the robot can smoothly and accurately
move its tool to the desired position and orientation
within the workspace.
Figure 4: Simulation environment (view 2).
4 PARAMETER OPTIMIZATION
As explained in previous sections, the optimisation of
the different hyperparameters of the RL algorithm to
be used for the solution of a problem is fundamental
for the optimal learning of the algorithm, thus making
it possible to solve the problem in an optimal number
of steps.
This consideration becomes even more critical in
complex problems where the algorithm's learning
time is substantial. For the hyperparameter
optimization in the problem described, we utilized the
Optuna library (Akiba et al., 2019).
For the optimisation of hyperparameters in the
problem described above, the Optuna library (Akiba
et al., 2019) has been used. This Python library is used
for general mathematical optimisation problems,
where objective functions can be defined to be
maximised or minimised, depending on the problem.
In the case of RL problems such as the one we are
dealing with, the way to optimise parameters
effectively is to train the RL algorithm within this
objective function.
At its core, Optuna requires the definition of an
objective function, which serves as the benchmark
against which the performance of different
hyperparameter configurations is evaluated. The
process begins with Optuna suggesting feasible
values for each hyperparameter based on predefined
search spaces. For this purpose, the following search
spaces are used:
• Policy: More precisely, the number of
neurons per layer. Categorical value of
[32, 64, 128, 256] neurons.
• Learning rate of the policy and critic
networks. Floating number range [ 3
10
,110
].
• Batch size for network training. Integer
number range [1, 24].
• Discount factor (gamma). Floating
number range [0.9,0.99]
• Number of epochs. Integer number
range [3, 20].
• Clip range. Floating number range
[0.1,0.3].
With these values, an RL training session is
initiated using the suggested hyperparameters. To
ensure efficiency and relevance, the number of
training steps is benchmarked against the baseline,
providing a constraint that guides the optimization
process. For every RL training session, the final mean
reward of the policy is used as the Optune objective
output.
As the iterations progress, Optuna intelligently
adjusts its suggestions based on the objective function
output of previous configurations, aiming to find the
optimal set of hyperparameters that maximize the
objective function’s output. This iterative and
adaptive approach ensures that the RL model is
trained with the most suitable hyperparameters,
enhancing its performance and reducing the overall
training time.
On Selecting Optimal Hyperparameters for Reinforcement Learning Based Robotics Applications: A Practical Approach
127
5 OBTAINED RESULTS
Hyperparameter optimisation using Optuna has been
used to optimise the learning process and maximise
the reward obtained in the RL problem presented in
section 3 of the paper.
According to the literature and to the state of the
art, the PPO algorithm has been selected for the
solution of this problem.
A total of 100 parameter optimisation iterations
have been performed, training each of these iterations
for 150,000 steps.
This number of steps has been established by
observing the convergence of the reward for this
problem taking the default parameters established for
the PPO algorithm.
Of the 100 hyperparameter optimisation tests
performed, trials 47 and 70 are the best performers
according to the reward plots obtained for training.
Table 2 shows the PPO baseline parameters and
the optimum parameters calculated in the 47 and 70
trials.
Table 2: Optimization parameters obtained with Optuna
Paramete
r
PPO
b
aseline
Trial 47
Optuna
Trial 70
O
p
tuna
N
etwork
size
64 neuron
per layer,
two la
y
ers
64 neuron
per layer,
two la
y
ers
64 neuron
per layer,
two la
y
ers
Learning
rate
0.0003 553.52e-
10
0.00076
N
. Steps 2048 300 300
Batch size 64 12 12
N
. Epochs 10 11 8
Gamma 0.99 0.9 0.9
Clip
Range
0.2 0.2 0.2
As can be seen in the table above, the optimised
parameters in iterations 47 and 70 have similar values
for almost all parameters, and in turn differ quite a lot
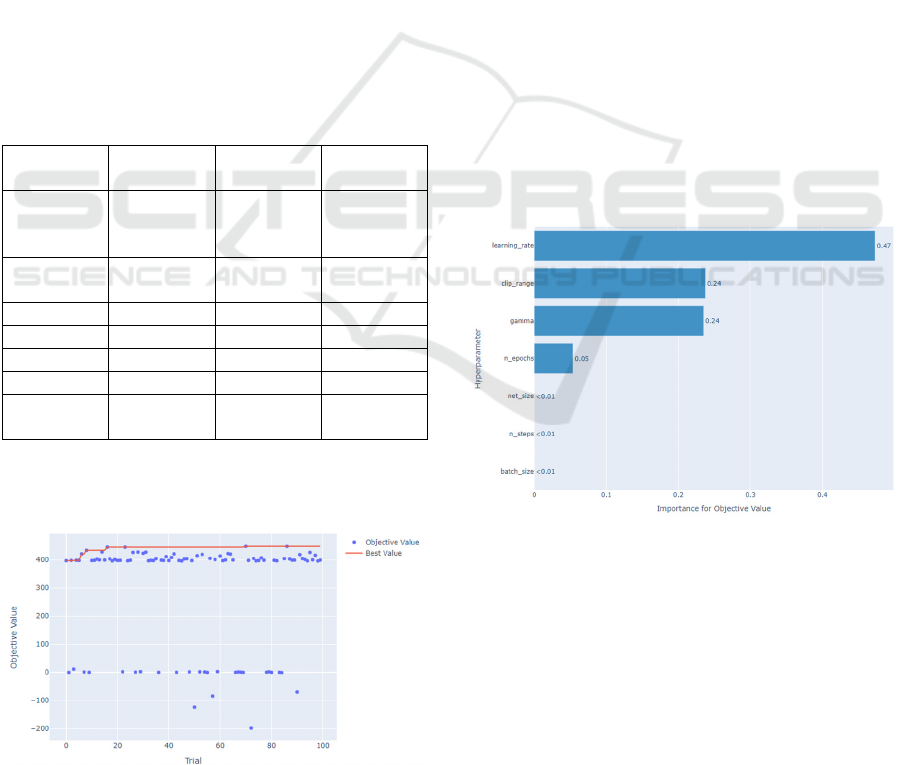
Figure 5: Optimization history (Optuna).
from the default parameters provided by the PPO
algorithm in the Stable Baselines 3 reinforcement
learning library (Raffin et al., 2021).
In the following images you can see the
optimisation history carried out by Optuna (figure 5)
and the relative importance of each of the
hyperparameters in the final result of the optimisation
(figure 6).
Finally, to demonstrate the effectiveness of
hyperparameter optimisation in RL problems, this
section finally presents the reward and episode length
plots for the problem proposed in section 3, both for
the default PPO parameters (baseline of the problem)
and for the optimal parameters obtained and
previously presented in table 2.
On the one hand, the reward plot shows the
learning convergence speed of the problem,
estimating it when it is taken to the maximum value
of reward and this is kept constant. It also allows us
to observe the maximum reward obtained, also
showing the effectiveness of the agent in solving the
problem.
The graph illustrating the average episode lengths
for each set of chosen hyperparameters further
underscores the effectiveness of our solution
approach. The shorter the length of the episodes, the
fewer steps the agent needs to solve the problem, so
it is a more effective agent.
Figure 6: Hyperparameter relative importance to optimize
the final objective value.
Figure 7 shows the average reward obtained
during the training process, the values obtained by the
baseline PPO are represented in the blue graph, while
Optuna iteration 47 is shown in green, and 70 in red.
As shown, the baseline PPO needs 125k steps for
the convergence of the training, while the other two
options reach the optimal result in 50k, i.e., the
learning capacity of the problem is improved, taking
3 times less time.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
128
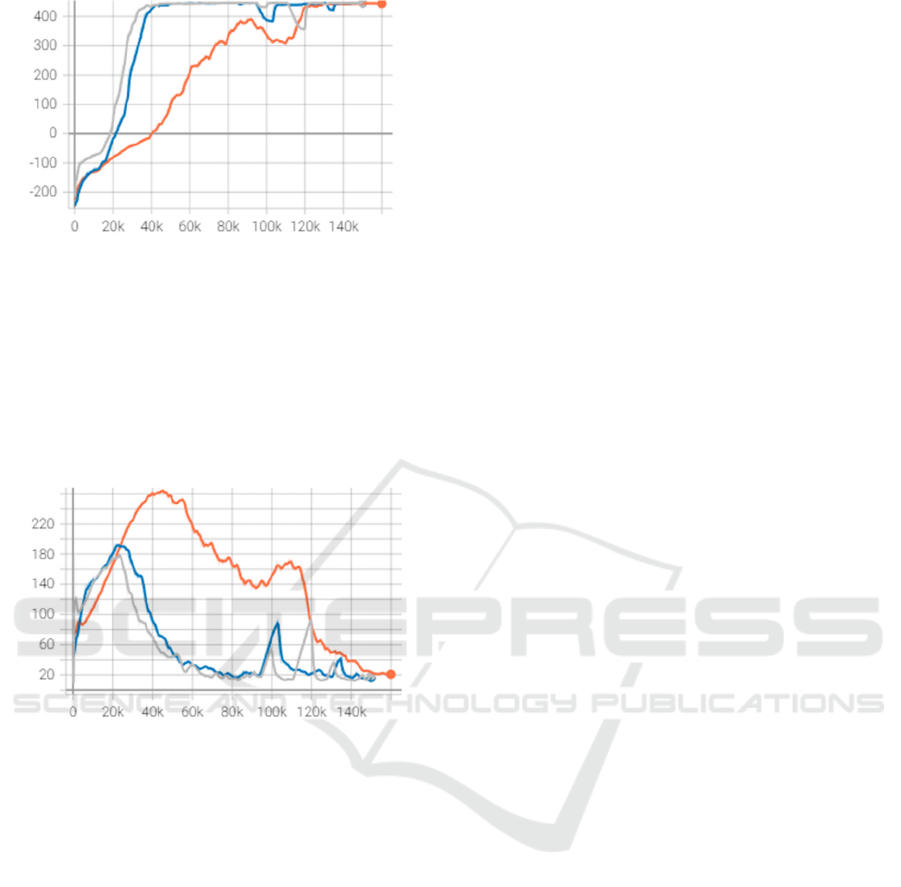
Figure 7: Reward graph for PPO baseline (orange),
Optuna iteration 47 (grey) and Optuna iteration 70 (blue).
Moreover, figure 8 shows the average episode
lengths during training for these three configurations.
As is logical after observing the previous reward plot,
the average episode lengths for the Optuna
configurations are much shorter than those obtained
by the baseline PPO, showing a superior effectiveness
in training the RL agent.
Figure 8: Episode length for PPO baseline (orange),
Optuna iteration 47 (grey) and Optuna iteration 70 (blue).
While the performance of the robot remains
relatively consistent as it converges to the optimal
policy, a notable advantage emerges in the speed of
this convergence. The research indicates that, even if
the end performance metrics of the robot do not show
substantial improvement, the time taken to reach this
optimal policy is significantly reduced. This faster
convergence can lead to more efficient training
processes and quicker deployment of robotic
solutions in real-world scenarios, emphasizing the
importance of optimizing the learning process even if
the end performance remains unchanged.
6 CONCLUSIONS AND FUTURE
WORK
In this research work, a practical study and parameter
optimisation method has been carried out on a
reinforcement learning algorithm, PPO, used to
control a UR3 industrial robot.
It has been shown that the correct choice of
optimal hyperparameters for the resolution of a
problem of this type is fundamental to reach a fast
convergence and to obtain an effective policy in the
shortest possible training time of the algorithm.
This last point, the necessary training time, is of
special importance in problems based on RL
techniques, since it grows exponentially with the
complexity of the problem, being usual to need to
execute millions of training steps for any typical
problem in the field of robotics.
For this reason, the method is of particular value
for the efficiency of training this type of algorithms.
As future work, it would be necessary to carry out
a scientific study of the influence that each of the
hyperparameters has on the convergence of a given
reinforcement learning algorithm.
In this first work in this respect, the parameters
have been selected empirically, observing which ones
were particularly relevant in the learning stage of the
algorithm. Once those considered most relevant have
been selected, they have been optimised using the
Optuna library.
An important advance to this procedure would be
scientific justification of the choice of
hyperparameters to be optimised, which is considered
the missing step for a complete optimisation process
of the training of RL algorithms.
ACKNOWLEDGEMENTS
This research was carried out within the project
ACROBA which has received funding from the
European Union’s Horizon 2020 research and
innovation programme, under grant agreement No
101017284.
REFERENCES
Akiba, T., Sano, S., Yanase, T., Ohta, T., & Koyama, M.
(2019). Optuna: A Next-generation Hyperparameter
Optimization Framework. Proceedings of the ACM
SIGKDD International Conference on Knowledge
Discovery and Data Mining, 2623–2631.
https://doi.org/10.1145/3292500.3330701
Bhuiyan, T., Kästner, L., Hu, Y., Kutschank, B., &
Lambrecht, J. (2023). Deep-Reinforcement-Learning-
based Path Planning for Industrial Robots using
Distance Sensors as Observation. http://arxiv.org/
abs/2301.05980
On Selecting Optimal Hyperparameters for Reinforcement Learning Based Robotics Applications: A Practical Approach
129

Bottou, L. (1991). Stochastic Gradient Learning in Neural
Networks.
Coumans, E. (n.d.). PyBullet Physics Engine.
Https://Pybullet.Org/Wordpress/.
Goodfellow, I., Bengio, Y., & Courville, A. (n.d.). Deep
Learning.
Gymnasium: A standard API for reinforcement learning.
(n.d.). Https://Gymnasium.Farama.Org/.
Ha, H., Xu, J., & Song, S. (2020). Learning a Decentralized
Multi-arm Motion Planner. http://arxiv.org/abs/2011.
02608
Kober, J., Bagnell, J. A., & Peters, J. (2013). Reinforcement
learning in robotics: A survey. International Journal of
Robotics Research, 32(11), 1238–1274.
https://doi.org/10.1177/0278364913495721
Lapan, M. (2018). Deep Reinforcement Learning Hands-
On.
Li, X., Liu, H., & Dong, M. (2022). A General Framework
of Motion Planning for Redundant Robot Manipulator
Based on Deep Reinforcement Learning. IEEE
Transactions on Industrial Informatics, 18(8), 5253–
5263. https://doi.org/10.1109/TII.2021.3125447
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., & Riedmiller, M. (2013).
Playing Atari with Deep Reinforcement Learning.
http://arxiv.org/abs/1312.5602
Peres, R. S., Jia, X., Lee, J., Sun, K., Colombo, A. W., &
Barata, J. (2020). Industrial Artificial Intelligence in
Industry 4.0 -Systematic Review, Challenges and
Outlook. IEEE Access. https://doi.org/10.1109/
ACCESS.2020.3042874
Raffin, A., Hill, A., Gleave, A., Kanervisto, A., Ernestus,
M., & Dormann, N. (2021). Stable-Baselines3: Reliable
Reinforcement Learning Implementations. In Journal
of Machine Learning Research (Vol. 22).
https://github.com/DLR-RM/stable-baselines3.
Savastano, M., Amendola, C., Bellini, F., & D’Ascenzo, F.
(2019). Contextual impacts on industrial processes
brought by the digital transformation of manufacturing:
A systematic review. Sustainability (Switzerland),
11(3). https://doi.org/10.3390/su11030891
Scheiderer, C., Thun, T., & Meisen, T. (2019). Bézier curve
based continuous and smooth motion planning for self-
learning industrial robots. Procedia Manufacturing, 38,
423–430. https://doi.org/10.1016/j.promfg.2020.01.
054
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., &
Klimov, O. (2017). Proximal Policy Optimization
Algorithms. http://arxiv.org/abs/1707.06347
Shahid, A. A., Roveda, L., Piga, D., & Braghin, F. (n.d.).
Continuous Control Actions Learning and Adaptation
for Robotic Manipulation through Reinforcement
Learning.
Sherwani, F., Asad, M. M., & Ibrahim, B. S. K. K. (2020).
Collaborative Robots and Industrial Revolution 4.0 (IR
4.0). https://www.mirai-lab.co.jp/
Shweta Bhatt. (n.d.). Reinforcement Learning 101: Learn
the essentials of Reinforcement Learning!
Https://Towardsdatascience.Com/Reinforcement-
Learning-101-E24b50e1d292.
Sutton, R. S., & Barto, A. G. (2020). Reinforcement
learning : an introduction (2nd Edition). The MIT Press.
Xie, J., Shao, Z., Li, Y., Guan, Y., & Tan, J. (2019). Deep
Reinforcement Learning with Optimized Reward
Functions for Robotic Trajectory Planning. IEEE
Access, 7, 105669–105679. https://doi.org/10.1109/
ACCESS.2019.2932257
Zhou, D., Jia, R., Yao, H., & Xie, M. (2021). Robotic Arm
Motion Planning Based on Residual Reinforcement
Learning. 2021 13th International Conference on
Computer and Automation Engineering, ICCAE 2021,
89–94. https://doi.org/10.1109/ICCAE51876.2021.
9426160.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
130
