
Automated System for Indoor Sport Video Production
Sebastian Purtak
1
, Jagoda Lazarek
1,2
, Paweł Gora
1,3
and Łukasz G ˛asiorowski
1
1
Stellis sp. z o.o., Piotrkowska 157A/10.03, 90-270 Lodz, Poland
2
Polish-Japanese Academy of Information Technology, Koszykowa 86, 02-008 Warsaw, Poland
3
University of Warsaw, Faculty of Mathematics, Computer Science and Mechanics, Banacha 2, 02-097 Warsaw, Poland
Keywords:
Computer Vision, Object Detection, Object Tracking, Handball, Futsal, Artificial Intelligence, Sport, Deep
Learning, Expert Systems.
Abstract:
Information is the key to success in every area of life, including professional and amateur sports. This is
why the recording of matches is so important for sports clubs and organisations, as it allows them to gain an
information advantage. In this paper, we present the prototype of the ISVP.AI system, which uses Artificial
Intelligence technology to automate the production process of sports recordings in handball and futsal. Our
solution involves the use of YOLO family algorithms to detect objects such as players or a ball for each frame
of the recording. This information is then used by the expert system, whose task is to detect events relevant to
the course of the game. The representation of the state of the game built in this way allows for the automatic
production of full sports recordings, match highlights, calculation of statistics and adding effects that improve
the attractiveness of the produced recordings. Thanks to this, our system allows for potentially significant
reduction of costs associated with recording handball and futsal sports games.
1 INTRODUCTION
Recordings of indoor sports games are an important
source of information for participating teams. The
analysis of the match recording allows for a detailed
assessment of the game of both teams, the perfor-
mance of individual players or the effectiveness of
the tactics used. In result teams can identify their
strengths and weaknesses, as well as use informa-
tion from recordings of opponents’ matches to modify
their strategy. In addition to tactical and training val-
ues, the registration of sports events is also of market-
ing importance. A properly recorded match record-
ing is in itself an entertainment product that can be
addressed to fans of a given club. Match highlights
are the perfect type of content for all kinds of social
media channels. High-quality video materials can be
used not only to attract sponsors or new viewers but
also to promote the entire sports discipline.
The correct preparation of the recording of an in-
door sports match is a complex task that requires the
involvement of financial, technical, and personal re-
sources. During regular matches in indoor sports,
image recording is usually carried out using a single
camera, placed in the middle of the field, behind the
field line. The camera is operated by an operator who
controls it in such a way that it follows the action on
the field. The recorded material must then be pro-
cessed to produce match highlights and calculate the
statistics. These tasks require specialist knowledge in
the field of image registration and processing, which
significantly increases the cost of the entire project.
For this reason, sports clubs that do not have budgets
often give up the practice of recording matches, and
thus also all the benefits that come with it.
To solve these problems, there were several at-
tempts to build systems for supporting and automat-
ing the process of producing sports videos (Ariki
et al., 2006). The available solutions allow for partial
automation of the production of sports recordings, but
at the same time, they have several significant limita-
tions. First of all, the most advanced systems are ded-
icated to the most popular sports disciplines (Quiroga
et al., 2020). There are no systems on the market ded-
icated to futsal and handball, which would cover the
characteristics of these sports disciplines with their
specification. Moreover, none of these systems offer
full automation of the production process of visually
attractive recording. Thus, their use still involves ad-
ditional staff. Other significant limitations of the solu-
tions available on the market include the need to pur-
chase dedicated equipment, limited possibilities for
the user to interfere in the recording production pro-
cess, or the inability to combine match highlights.
All this means that the use of systems supporting
the production of match recordings, although it can be
Purtak, S., Lazarek, J., Gora, P. and G ˛asiorowski, Ł.
Automated System for Indoor Sport Video Production.
DOI: 10.5220/0012159300003587
In Proceedings of the 11th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2023), pages 23-33
ISBN: 978-989-758-673-6; ISSN: 2184-3201
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
23

helpful in the implementation of large projects, usu-
ally involves a significant increase in costs. There-
fore, the possibility of using such solutions remains
poorly available to small organisations that do not
have significant financial resources. The lack of prod-
ucts dedicated to futsal and handball additionally re-
sults in the low popularity of these systems in these
sports.
In this paper, a prototype of the ISVP AI sys-
tem, which enables full automation of match record-
ing production, is presented. The solution is dedicated
to futsal and handball, and its main assumption is the
use of artificial intelligence algorithms to significantly
reduce the cost of the entire project. ISVP AI uses ad-
vanced computer vision algorithms and an expert sys-
tem, which builds a data structure describing the state
of the game for each frame of the recording. Such a
form of representation then allows for the implemen-
tation of more advanced functions, such as determin-
ing the visibility area or generating match highlights.
The prototype does not require the purchase of a
dedicated camera and can process the image recorded
with any equipment, as long as it is recorded in 4K
resolution and 30 FPS. In addition, all ISVP AI func-
tionalities have been implemented in such a way as
to ensure the greatest possible user intervention in
the production process. All of the solutions used
are aimed at building a product that will significantly
increase the availability of match recording practice
among small and medium futsal and handball clubs.
2 STATE OF THE ART
2.1 Systems for the Production of
Sports Recordings
Systems offering full automation of sports match
recordings have been a subject of research by compa-
nies in the sports technology industry. A prime ex-
ample is the prototype developed by Genius Sport,
which aims to automate basketball game recordings
(Quiroga et al., 2020). This system is constructed
from a series of components responsible for object de-
tection within matches, court modelling, action recog-
nition, and game state tracking. The object detection
component employs the YOLOv3 algorithm and is
capable of identifying players, the ball, and referees.
The remaining components of the system are tailored
to the specifics of basketball as a discipline. This sys-
tem is exclusively focused on automating the produc-
tion of complete sports recordings, thereby omitting
the creation of highlights or streaming capabilities.
Nonetheless, it stands as a solution that, despite its
prototype nature, demonstrates the potential of util-
ising contemporary machine learning techniques for
achieving full automation in sports recordings.
One of such solutions is the offer of the Hudl
company, which includes an extensive platform for
sports data analysis and a set of cameras that allow for
the automation of the match recording process (Ag-
ile Sports Technologies, 2021). These cameras come
in three variants, designed to record outdoor games
(Focus Outdoor), indoor sports matches (Focus In-
door), and football matches (Focus Flex). The im-
age is recorded in 1080p resolution. The cameras can
automatically follow the action on the field and have
the support of the AI system to track match objects.
Integration with the Hudl software allows recording
to start automatically, according to the club’s sched-
ule, and the cameras can simultaneously stream the
recorded video. The software includes an application
to control Hudl Focus cameras and several additional
programs. All these products are fully compatible
with each other and create one ecosystem whose main
task is to support sports clubs in the field of recording,
processing, and sharing sports recordings. At the mo-
ment, the system operates in five sports disciplines,
i.e. football, basketball, volleyball, rugby, and ice
hockey. This solution is addressed primarily to large
sports clubs that produce and analyse large amounts
of match recordings. The Hudl platform does not sup-
port futsal and handball, and for its proper operation,
it is necessary to purchase dedicated equipment. It is
also a system that primarily supports the production
of sports recordings, not its full automation.
Systems like those offered by Hudl are aimed at
larger clubs that can afford to invest in such advanced
technical solutions. The segment of smaller sports
recording systems can be represented by a set of VEO
sports cameras (VEO, 2021). The system is designed
to automate the streaming of football matches. It con-
sists of a specialised Veo Cam 2 camera, equipped
with hardware AI support, and software in the form
of a mobile application and Veo Editor program with
extensions. The camera is weatherproof and able to
automatically follow the action on the field. The sys-
tem can automatically detect match events and al-
lows users to interfere with the recording by applying
markings and notes or adding events themselves. The
main limitations of the system come down to the need
to purchase dedicated hardware and the fact that it is
mainly designed to operate in outdoor conditions. For
this reason, the manufacturer indicates that its prod-
uct is primarily optimised for football games. The
cost of the entire solution is additionally increased by
the need to purchase software along with paid add-
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
24

ons that are necessary to use the full capabilities of
the system.
To sum up, currently available systems for the pro-
duction of match recordings on the market success-
fully use computer vision technologies to partially au-
tomate this process. However, these are solutions that
require the purchase of specialised equipment and of-
fer automation only as a supporting function. More-
over, there are currently no such solutions dedicated
to handball and futsal. Thus, in order to produce vi-
sually attractive recordings of matches in these dis-
ciplines, it is still necessary to engage financial and
personal resources that are beyond the reach of small
clubs and sports organisations.
2.2 Object Detection
The key technology in building systems to support the
production of match recordings is computer vision.
A special role in this regard is played by object de-
tection algorithms, as they allow for the identification
and collection of information about individual match
participants. The significant progress that has been
made in this field in recent years is the result of the
use of Deep Learning.
Modern object detection algorithms can be di-
vided into two main groups: one-stage and two-stage
detectors. Among the two-stage detectors, the dom-
inant role is played by the R-CNN algorithm (Gir-
shick et al., 2013) and its subsequent versions, includ-
ing Fast R-CNN (Girshick, 2015) and Faster R-CNN
(Ren et al., 2015). The operation of these algorithms
consists of the first step in determining the areas in
the image where the object may potentially be located
(Region Proposal Method). In the second step, locali-
sation and classification are carried out in the detected
areas in order to determine whether the sought object
actually exists, what class it belongs to, and where
exactly it is located. A characteristic feature of these
solutions is high detection efficiency, which is paid
for by a relatively long inference time.
Single-stage detectors perform detection at once
over the entire image. By omitting the step of detect-
ing potentially significant image areas, the inference
time is significantly reduced and the algorithm learn-
ing procedure is simplified. These solutions perform
worse in terms of detection efficiency than two-stage
detectors, but their fast operation time makes them
suitable for real-time object detection. The most im-
portant group of such solutions are YOLO algorithms
(Redmon, 2016). It is this family of algorithms that
best meets the technical requirements of systems for
automating the production of match recordings, as
it allows not only to significantly reduce production
time, but can also be used in live streams.
The most advanced versions of the YOLO al-
gorithm are YOLOv4, YOLOv5, YOLOv7, and
YOLOR. It should be mentioned that the development
of these algorithms is carried out today by many dif-
ferent teams, which leads to a lack of consistency in
the naming. The original development line consists
of versions from one to four, and it is YOLOv4 that
is today the latest original implementation of this al-
gorithm (Bochkovskiy et al., 2016). YOLOv5 is the
first unofficial implementation that performs slightly
better than YOLOv4 and is very popular due to its
easier learning and implementation procedure (Hor-
vat and Gledec, 2022). Another unofficial implemen-
tation, which is YOLOv7, introduces new techniques
for reparameterisation and model scaling. It also al-
lows for a significant reduction in the inference time
and slightly higher precision compared to other mod-
els (Wang et al., 2022). YOLOR achieves results sim-
ilar to YOLOv4, with a much shorter inference time,
and allows the use of implicit and explicit knowledge
in the learning process (Wang et al., 2021). All of
these models, in their basic version, are trained using
popular datasets, which are benchmarks in the field
of object detection. The most important are COCO
(Lin et al., 2014), PASCAL (Everingham et al., 2009),
and ImageNet (Deng et al., 2009). These sets are
also used to compare and evaluate the aforementioned
models.
Finally, a new type of detectors should be men-
tioned that use the transformer architecture known
from large language models (LLM) (Carion et al.,
2020). These algorithms achieve very promising re-
sults, which should be considered as a direction for
further development of object detection technology.
However, at the moment the inference times of these
models do not allow them to operate in real time, and
thus they do not apply to video streaming systems.
What’s more, transformers in their current version are
not very good at detecting small objects. This may be
important in the context of ball detection, and thus af-
fect the effectiveness of such a solution in the system
for the automatic production of match recordings. On
the other hand, the YOLO family of algorithms, as a
mature solution, offers several innovations to improve
their performance in this area. For this reason, for the
purposes of this paper, experiments were carried out
using the most advanced versions of YOLO.
Automated System for Indoor Sport Video Production
25

3 APPLICATION
3.1 Features
The ISVP AI system is a solution entirely dedicated
to the automation of match recordings in futsal and
handball. This means that all the technologies used
in it have been adapted to the specificity of these
sports disciplines. This applies primarily to the ma-
chine learning models used, which were subjected to
the learning process using training data sets covering
only handball or futsal match recordings.
Specialisation allowed us to build a solution en-
abling full automation of match recording produc-
tion. This means that ISVP AI, after proper configura-
tion, can produce a visually attractive match recording
without any human intervention. The final product of
our system’s operation is a recording covering the en-
tire field, with a virtual camera that steers the field
of view following the action. This mechanism simu-
lates the work of the camera operator by selecting the
area of the frame to be visible, moving it, and making
close-ups depending on the situation on the field.
To complete this task, it is necessary to correctly
recognize the state of the game for each frame. The
system must be able to determine where the action
is happening at a given moment to correctly indicate
the area of the recording that is visible to the viewer.
ISVP AI uses object detection algorithms to deter-
mine and track the position of all visible match ob-
jects. The detection of more complex match events is
carried out using an expert system. In this way, a rep-
resentation of the state of the game is created for each
frame, which allows the implementation of the main
functionalities of the system.
Match objects are understood as all persons who,
under the rules of a given discipline, are directly in-
volved in playing the match. So there will be both
players and goalkeepers of both teams, as well as ref-
erees. In addition, the props necessary for the match
should also be considered as match objects. In the
case of futsal and handball, these will be goals and a
ball.
In order to perform its task correctly, the system
must be able to independently detect the location of
all the mentioned match objects on each frame of the
recording. In addition, due to the sequential nature
of the processed data, it is necessary to track the dis-
placement of individual match objects on subsequent
frames of the recording. Finally, in order to correctly
determine the situation on the field, it is necessary
to identify and classify individual match objects. In
other words, the system must not only be able to de-
termine that there is a match object in a given area of
the presented frame, but also that it is a player and to
which team this player belongs.
The information collected in this way allows for
precise determination of the location of the action on
the recording covering the area of the entire field.
Thanks to this, there is no need to record the video
from several different points and it is possible to use a
single camera. There is also no need to purchase spe-
cialised equipment, because the algorithms used can
work with any camera whose parameters fall within a
broad technical framework.
Information about detected match objects is then
transferred to the expert system whose task is to detect
match events. This term should be understood as sit-
uations that are important for the course of the game,
in which the match objects are involved. A prime ex-
ample of a match event is the scoring of a goal. The
system should therefore be able to combine informa-
tion from the sequence of presented images, and then
classify them correctly.
Precise determination of the state of the game for
individual frames allows you to determine which of
them should be included in the final recording. The
detected and classified match events will enable the
production of highlights of both the actions and the
entire match. The same data can be used to calcu-
late match statistics automatically. The technologies
used will also allow for a much greater intervention
of the end user in the entire recording production pro-
cess. Detecting the position of individual match ob-
jects will allow, among other things, to add AR effects
without the need to edit the recording using separate
software and without the need for specialist knowl-
edge.
All of these operations, including the production
of a full match recording, take less than 4 hours. The
achieved results make ISVP AI one of the fastest sys-
tems of this type currently. At the same time, it is
the only solution that is fully dedicated to futsal and
handball, thus becoming a significant innovation in
the field of technical support for these indoor sports
disciplines. This is especially important in the con-
text of low system implementation costs. ISVP AI is
currently the only system to support and automate the
production of sports recordings, which does not re-
quire a dedicated camera to operate. The system can
accept and process data in the form of a video file or
stream, in 4k resolution, at 30 FPS, and in HEVC en-
coding. This allows potential users to use any cameras
that can record video with such parameters, which
further reduces the costs of the entire project.
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
26

3.2 Architecture
The ISVP AI system consists of two main compo-
nents: the ISVP APP web application and the Ma-
chine Observer service. The system is controlled
from the web application, while the Machine Ob-
server is responsible for performing calculations us-
ing machine learning algorithms. Both main compo-
nents have a modular structure, which facilitates the
potential scaling and expansion of the system (Fig.
1). The backbone of the entire solution is the Google
Cloud infrastructure.
ISVP APP, apart from its standard logic, distin-
guishes four main modules: Game State, Camera-
man, Event Detector, and Object Highlighting. Each
of these modules contains logic that implements one
of the key functionalities of the application. Game
State is responsible for saving and storing informa-
tion about the state of the game on individual frames
that were obtained in the course of video processing.
Event Detector includes an expert system whose task
is to detect match events based on data on detected
match objects. The cameraman also uses match ob-
ject data to add a virtual camera effect to the video.
Finally, Object Highlighting is the module responsi-
ble for generating match highlights, for which it uses
a full set of information about both objects and match
events.
Figure 1: Diagram of the high-level architecture of the ISVP
AI system.
All of the listed modules are containerised and
their operation can be moved to a separate virtual ma-
chine, if necessary. A similar solution was used in
Machine Observer. In this case, two modules can be
distinguished, the first of which is responsible for the
implementation of the object detection model, and the
second implements the object tracking model. The
data flow in the system starts with the user uploading
the unprocessed version of the video. It is then stored
in Google Storage and the user can choose to start the
processing. In such a situation, the ISVP APP estab-
lishes communication with the Machine Observer and
leases a virtual machine to perform the calculations.
Machine Observer performs the detection process us-
ing both detection and tracking and then sends the
results back to the application. Here they are trans-
ferred to the Game State module, which saves them,
and control is returned to the user. The latter can de-
cide to start the next stage of processing or decide to
intervene on his own by adding AR effects or manu-
ally marking match objects. Depending on the user’s
decision, one of the application modules is launched
and the data collected in the Game State module is
then transferred to it. The entire system was made
in Python technology with the use of Postgresql and
Redis databases.
4 EXPERIMENTS
4.1 Detection and Tracking of Match
Objects
In the area of match object detection, we conducted
a series of experiments to select the best possible de-
tector. In addition to the average precision (mAP),
which is a classic metric of object detection efficiency,
the inference time also played an important role in
the evaluation of the models. This is due to the need
for real-time detection in the case of match streaming,
which was one of the factors determining the choice
of algorithms from the YOLO family as the primary
detectors.
For the purposes of the experiments, there were
two datasets prepared, separately for futsal and hand-
ball (Tab. 1). Each set had the same set of five classes
of match objects: player, goalkeeper, referee, goal,
and ball. In order to collect data, a total of 32 matches
(16 for futsal and 16 for handball) were recorded in
5 sports halls. The footage covering 1,372 minutes of
futsal matches and 1,555 minutes of handball matches
was collected. The videos were recorded in 4K reso-
lution, at 30 FPS, and in HEVC encoding.
The first algorithm that was tested was YOLOv5.
This is an unofficial version of the main development
line of YOLO algorithms, which differs only slightly
Automated System for Indoor Sport Video Production
27

Table 1: Characteristics of data sets.
Futsal Handball
number of
frames
48942 49638
player 198419 295235
goalkeeper 48263 48443
referee 49341 49051
goal 48956 42560
ball 22195 21340
from YOLOv4 in terms of architecture. However, the
implementation is completely different, which in this
version allows for much easier customisation of the
model. There are four main variants of YOLOv5,
which are essentially scaled-down versions of the
same architecture. The starting point for our ex-
periments was the YOLOv5x variant, which is the
largest version of this detector. Such a solution, al-
though computationally expensive, allowed for deter-
mining the upper limits of the unmodified version of
YOLOv5 in detecting match objects.
The review and analysis of the data then allowed
identifying potential directions for modifying the al-
gorithm. Among all the classes we detect, there are
two main groups: people and props. They differ fun-
damentally in terms of the proportions and sizes of
bounding boxes (Fig. 2). While the bounding boxes
for players, referees, and goalkeepers are relatively
similar in size, the bounding boxes for different props
can vary significantly. There are two classes of props
in our datasets: ball and goal. They differ not only
in size but also in specificity, because the goal is a
stationary object, always remaining in the same place
on the field, while the ball often moves at high speed.
Therefore, it can be assumed that the goals will be rel-
atively easy to detect objects, while the ball can be a
challenge for the model.
With this in mind, it was decided to modify the
model’s architecture to improve not only its inference
time but also its ability to detect small objects. Usu-
ally, it is appropriate to use a concatenation-based net-
work as a backbone (Benjumea et al., 2021), such as
DenseNet. These are very effective feature extractors,
the use of which is computationally expensive and can
negatively affect the inference time. Instead, we mod-
ified the neck, in which we used the Feature Pyra-
mid Network. It is a component specialised in detect-
ing objects at different scales, which turns out to be
particularly useful when detecting small objects (Lin
et al., 2017). At the same time, it is a simpler solu-
tion than the standard neck construction in YOLOv5,
which should allow us to reduce the inference time
while maintaining efficiency in detecting small ob-
jects.
Figure 2: The average value of bbox area in the futsal
dataset.
Finally, the last version of the algorithm that was
used in the experiments was YOLOv7. This decision
resulted from the specific architecture of this model.
The YOLOv7 backbone is built on the E-ELAN net-
work, which is an architecture based on the concate-
nation mechanism, with all its consequences, both in
terms of detection efficiency and inference time. On
the other hand, the authors of YOLOv7 present sev-
eral solutions in their work (Wang et al., 2022) aimed
at optimising this type of architecture. As a result,
YOLOv7 achieves results similar to YOLOv5 with a
much shorter inference time.
4.2 Events Detection
Information about detected match objects is the ba-
sis for detecting more complex phenomena such as
match events. These are then used to produce match
highlights and calculate statistics. A separate Event
Detector module is responsible for detecting match
events, which accepts data in the form of XML or
MOT files. The data in the files is an ordered se-
quence that stores information specific to each frame.
The user can intervene in the event detection process
using a separate panel in the web application (Fig. 3).
It can manually indicate the frames that are the begin-
ning and end of individual events, as well as mark the
field lines.
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
28
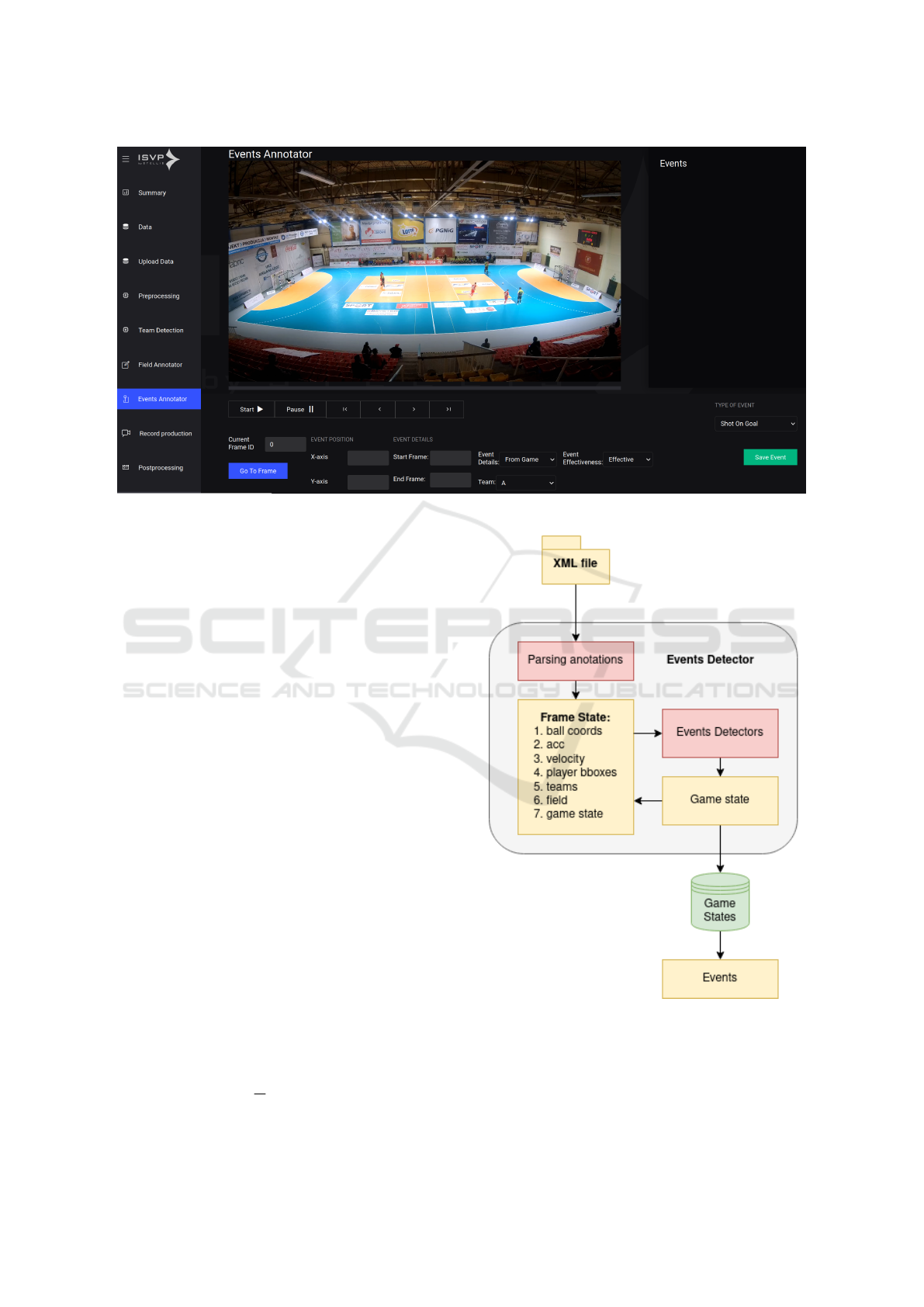
Figure 3: The Event Editor window in the ISVP AI application.
The Event Detector module is built as an expert
system based on rules that allow the detection of com-
plex match situations. A separate detector is respon-
sible for the detection of each type of match events,
which marks single frames or pairs of frames that are
the beginning and end of a given event. The param-
eters and configuration of the detectors were selected
through experiments. Currently, the module can de-
tect different types of shots (on target, defended, and
missed), restart after a break in the game, and count
ball possession statistics.
Event detection is performed sequentially, in ac-
cordance with the order of recorded frames (Fig. 4).
Information about the frames is transferred to indi-
vidual detectors, and based on them, they update their
internal state and save their results in the object re-
sponsible for storing information about the state of
the game. Some types of events are spread over time,
which means that the corresponding detectors analyse
not only individual frames but also the saved state of
the game for previous frames.
The operation of a single detector can be demon-
strated in the example of the Shot Detector for fut-
sal, which is responsible for detecting the moment of
starting the shot. It has the character of a finite au-
tomaton, which occurs in two states: waiting and in-
vestigation.
After receiving information about the frame, the
detector checks if the acceleration of the ball has ex-
ceeded the value of 7.5 units:
p
t
2
> 7.5 (1)
Figure 4: Diagram of the Event Detector data flow.
where p is the number of pixels and t is the frame
duration.
If this threshold is exceeded and the ball is within
the field of play and within 150 pixels of the player’s
bounding box, a shot factor is calculated.
Automated System for Indoor Sport Video Production
29

s = α
√
c (2)
where α is the angle between the direction of the ball
and the centre of the goal, and c is the distance of the
ball from the centre of the goal.
If the shot factor is less than or equal to 15, the de-
tector enters the investigation state, in which it checks
whether there has been a change in the direction of the
ball flight. The shot is detected if such a change has
not occurred in the next three frames of the recording.
4.3 Final Recording
The final step in the production of a match recording
is adding the effect of the camera following the action.
For this purpose, the system generates an operator’s
path, within which it sets a point for each frame that is
the centre of the simulated image. This point is calcu-
lated as a weighted average for the players’ positions
and the ball. In the vertical axis, the height of the cam-
era is only calculated once during the match. It is the
average between the player’s highest and lowest posi-
tion during the entire match, increased by 150 pixels.
The finished path is the basis for simulating the cam-
era movement. The maximum size of the viewport is
1600 x 900. Any camera shake is compensated for by
the smoothing function in the camera module.
Regardless of the production of the final record-
ing, it is possible to generate match highlights. The
process is similar and includes operator path genera-
tion, camera movement simulation, and postprocess-
ing. It is possible to generate match highlights for all,
selected or random match events. When two events
occur close to each other on the timeline, they are
combined into one highlight. When preparing the op-
erator’s path, the system selects the recording speed
and zoom level. The process of preparing the action
summary proceeds in a similar way to the production
of the final recording. After its completion, the post-
processing stage is also available, during which it is
possible to add effects such as slowing down time.
The user has the option of interfering both in the
production process of the final recording and in gen-
erating match highlights. In each of these cases, it
is possible to manually determine the operator’s path
and save it to a JSON file, which can be used in the
next stage of the system’s operation. When generat-
ing action highlights, the user can also select start and
end frames and adjust the video speed.
5 RESULTS
All of the YOLO model architectures we tested
achieved satisfactory mAP results, both for futsal and
handball. For futsal, the best results were achieved
by the v5-FPN and v7 variants, between which there
were slight differences for most classes (Tab. 2). The
YOLOv5-FPN gained an advantage in detecting the
ball, which seems to confirm the effectiveness of this
architecture in the task of detecting small objects. The
basic version of YOLOv5x obtained a slightly lower
mAP than the other models, but the main problem of
this variant was the long inference time. YOLOv7
was the best in this aspect, with an inference time of
19.4 ms. While the v5-FPN variant needed less than
7 ms more, the v5x performed calculations in almost
twice as long (Tab. 4). In the case of handball, the
v5x model achieved a mAP level similar to the other
models, although in the case of a ball, its detections
were clearly better (Tab. 3). However, this version of
YOLO was still characterised by twice as long infer-
ence time.
Thus, it was the v5-FPN and v7 versions that
turned out to be the most promising for use in the
ISVP AI system. The large size of the v5x model re-
sulted in a high computational cost, which translated
into a long inference time and made it difficult to use
this solution in the case of stream. At the same time,
it was the large size of this model that allowed it to
achieve better results in the field of ball detection in
handball. This is probably due to the specificity of
this discipline, in which the ball is often poorly visi-
ble on the recording. In these situations, the greater
number of parameters in v5x allowed this model to
better deal with partially obscured objects. The fast
inference time, high mAP scores, and relatively sim-
ple v5-FPN architecture allowed for further experi-
ments with the event detection module.
Since Event Detector is an expert system, it was
necessary to gather and use the knowledge of special-
ists in the field of sports recording production to as-
sess its operation. For this purpose, experts marked
frame intervals on selected videos with various types
of events. Then, for the same videos, the detec-
tion was carried out by individual detectors, and their
results were compared with the answers of experts
(hereinafter referred to as ground truth). It was ac-
cepted as True Positive for detections that had a com-
mon part with ground truth, greater than the assumed
threshold value (20%). If there were more such detec-
tions, the first one was considered True Positive. The
remaining detections were classified as False Positive.
Then, for each detector, the Correctness (P) was com-
puted:
P =
Precision + Recall
2
(3)
In order to properly assess the effectiveness of the
Event Detector module, an experiment using two sets
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
30
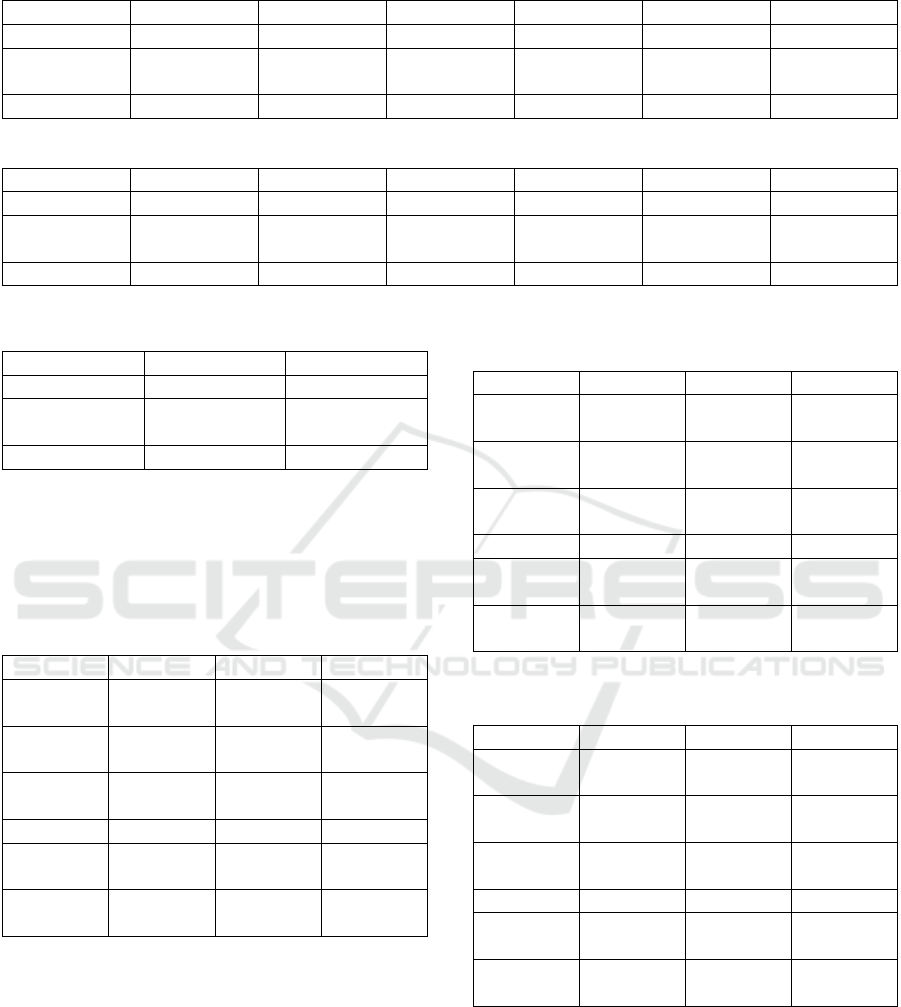
Table 2: Match object detection results for futsal (in mAP).
total players goalkeepers goal referee ball
YOLOv5x 83 87 70 99 65 85
YOLOv5-
FPN
86 91 76 99 76 87
YOLOv7 85 92 82 99 72 82
Table 3: Match object detection results for handball (in mAP).
total players goalkeepers goal referee ball
YOLOv5x 91 95 96 99 88 75
YOLOv5-
FPN
89 96 97 99 92 63
YOLOv7 90 96 98 99 92 64
Table 4: Comparison of inferential times (in ms).
Futsal Handball
YOLOv5x 54.0 54.5
YOLOv5-
FPN
26.2 26.7
YOLOv7 19.4 17.7
of match object data: manually prepared by a hu-
man and performed by the YOLO algorithm was con-
ducted. In result, it was possible to evaluate both the
operation of the entire ISVP AI system and the match
event detectors operating separately.
Table 5: Futsal results with manually marked match objects.
Detector Recall Precision Corr.
Shot on
target
0,82 0,69 0,76
Shot off
target
0,62 0,48 0,55
Shot
defended
0,69 0,28 0,48
Penalty 1 0,5 0,75
Game
restart
0,85 0,92 0,88
Game
restart
0,85 0,92 0,88
The obtained results are characterised by high
variability. However, higher detection accuracy can
be observed in cases where event detectors operate on
manually prepared data (Tab. 5, 7). This means that
even high results in terms of automatic detection of
match objects (on average above 0.8 mAP) leave sig-
nificant room for improvement (Tab. 6, 8). This is es-
pecially true for ball detection, which results in poorer
performance in detecting different types of shots.
Nevertheless, the obtained results turned out to be
sufficient enough to build a prototype system capa-
Table 6: Futsal results with automatically detected match
objects.
Detector Recall Precision Corr.
Shot on
target
0,36 0,44 0,40
Shot off
target
0,62 0,18 0,40
Shot
defended
0 0 0
Penalty 1 0,33 0,67
Game
restart
0,77 0,83 0,8
Ball own-
ership
0,58 0,68 0,63
Table 7: Handball results at manually marked match ob-
jects.
Detector Recall Precision Corr.
Shot on
target
0,72 0,32 0,52
Shot off
target
0,37 0,15 0,26
Shot
defended
0,34 0,21 0,28
Penalty 1 0,57 0,79
Game
restart
0,83 0,41 0,62
Ball own-
ership
0,46 0,65 0,55
ble of fully automatic production of match recordings.
The level of effectiveness of the match object detec-
tion allows for adding the effect of "camera follows
the action". As a result,it is possible to automatically
produce a full recording. The operation of the event
detector, although it requires further development, al-
ready at this stage allows for the automatic generation
of match highlights of some actions. It should also
Automated System for Indoor Sport Video Production
31

Table 8: Handball results with automatically detected match
objects.
Detector Recall Precision Corr.
Shot on
target
0,28 0,16 0,22
Shot off
target
0,17 0,04 0,11
Shot
defended
0 0 0
Penalty 0,63 0,71 0,67
Game
restart
0,86 0,40 0,63
Ball own-
ership
0,41 0,75 0,58
be emphasised that the ISVP AI prototype does not
require the construction of a dedicated camera, which
in the future may significantly reduce the costs of pro-
duction and purchase of such a system.
6 DISCUSSION AND FURTHER
RESEARCH
The prototype of the ISVP AI system proves the ef-
fectiveness of using modern methods of detecting ob-
jects in systems to support the production of sports
recordings. The obtained results also show that it is
possible to fully automate this process. Nevertheless,
the key result that was achieved is a potentially sig-
nificant reduction in the cost of production of match
recordings.
Thanks to the technology used, a system does not
require the employment of additional employees or
the purchase of specialised equipment. It is this po-
tential difference in the cost of using ISVP AI that
may have a positive impact on the practice of record-
ing futsal and handball matches. Compared to other
modern systems, the ISVP AI system manages to
achieve better results in the match object detection
metric, as well as create a completely new rule-based
system for futsal and handball event detection.
Nevertheless, further development of the ideas
presented here is still necessary. The obtained results
indicate that even relatively high results of match ob-
ject detection do not ensure high efficiency in detect-
ing more complex events. However, this is crucial
in building a virtual representation of the game state,
which is necessary to implement the basic function-
alities of the system. Hence, further research in this
area should focus primarily on improving methods of
combining the work of image processing algorithms
with expert systems.
REFERENCES
Agile Sports Technologies, I. (2021). Efficient analysis:
Record and upload automatically. https://www.hudl.
com/en_gb/products/focus.
Ariki, Y., Kubota, S., and Kumano, M. (2006). Auto-
matic production system of soccer sports video by dig-
ital camera work based on situation recognition. In
Eighth IEEE International Symposium on Multimedia
(ISM’06), pages 851–860. IEEE.
Benjumea, A., Teeti, I., Cuzzolin, F., and Bradley, A.
(2021). Yolo-z: Improving small object detection in
yolov5 for autonomous vehicles.
Bochkovskiy, A., Wang, C. Y., and Liao, H. (2016). Opti-
mal speed and accuracy of object detection.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In Computer Vision–ECCV
2020: 16th European Conference, Glasgow, UK, Au-
gust 23–28, 2020, Proceedings, Part I 16, pages 213–
229. Springer International Publishing.
Deng, J., Dong, W., Socher, R., Li, L. J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE conference on computer vi-
sion and pattern recognition, pages 248–255.
Everingham, M., Gool, L. V., Williams, C. K., Winn, J., and
Zisserman, A. (2009). The pascal visual object classes
(voc) challenge. In International journal of computer
vision, pages 303–308.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2013).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Horvat, M. and Gledec, G. (2022). A comparative study
of yolov5 models performance for image localization
and classification. In Central European Conference on
Information and Intelligent Systems, pages 349–356.
Faculty of Organization and Informatics Varazdin.
Lin, T. Y., Dollár, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T. Y., Maire, M., Belongie, S., Hays, J., Perona,
P., Ramanan, D., and Zitnick, C. L. (2014). Mi-
crosoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer Interna-
tional Publishing.
Quiroga, J., Maldonado, H., Ruiz, E., and Zapata, L. (2020).
As seen on tv: Automatic basketball video produc-
tion using gaussian-based actionness and game states
recognition. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 894–895.
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
32

Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, page 28.
VEO (2021). Revolutionizing sports recording. . . again.
https://www.veo.co/record.
Wang, C. Y., Bochkovskiy, A., and Liao, H. (2022). Yolov7:
Trainable bag-of-freebies sets new state-of-the-art for
real-time object detectors.
Wang, C. Y., Yeh, I. H., and Liao, H. (2021). You only
learn one representation: Unified network for multiple
tasks.
Automated System for Indoor Sport Video Production
33
