
Experimental Validation of the Non-Orthogonal Serret–Frenet
Parametrization Applied to the Path Following Task
Filip Dyba
a
Department of Cybernetics and Robotics, Faculty of Electronics, Photonics and Microsystems,
Wrocław University of Science and Technology, Janiszewskiego Street 11/17, Wrocław, 50-372, Poland
fi
Keywords:
Backstepping Integrator, KINOVA
®
Redundant Manipulator, Non-Orthogonal Projection, Path Following,
Serret–Frenet Parametrization.
Abstract:
The path following task belongs to the fundamental robotic tasks. It consists of following a spatial curve
parametrized with a curvilinear distance. In this time-independent approach no time regimes are imposed
on a robot. In fact, it is a natural definition of a task for many robots, e.g. autonomous vehicles. In the
paper a path following algorithm based on the non-orthogonal Serret–Frenet parametrization is presented.
Such an approach is global and does not introduce any constraints to the robot description with respect to
the path. It has been extensively studied recently. Hence, an experimental verification of the algorithm is
proposed. The validation was conducted on a laboratory test–bed equipped with a redundant manipulator —
the KINOVA
®
Gen3 Ultra lightweight robot. In the paper a case study is proposed to compare simulation
results and experimental measurements. It is an example how the mathematical legacy of the past centuries
can be used for modern solutions. The experimental study confirms the practical suitability of the presented
control algorithm.
1 INTRODUCTION
The path following task is one of the basic robotic
tasks distinguished in the literature and is a common
task in many contemporary applications. It seems
to be a natural solution to the encountered prob-
lems in modern robotics, e.g. it is eagerly used to
control autonomous vehicles (Rokonuzzaman et al.,
2021; Encarnac¸
˜
ao and Pascoal, 2000). Moreover, re-
searchers have successfully harnessed the idea of path
tracking for some non-obvious applications, such as
controlling flying robots (Lugo-C
´
ardenas et al., 2017)
or mobile manipulators (Mazur and Szakiel, 2009).
Hence, in the paper the next step in the development
of the path following algorithms, namely the experi-
mental validation, is presented.
According to (Hung et al., 2023), the task is to
force a robot to approach and move along a geomet-
rical curve (path) defined in its workspace, whereas
a velocity profile along the path has to be asymptoti-
cally tracked. A path is a purely geometrical descrip-
tion of a motion. It means that no time regimes are im-
posed on a controlled robot. The lack of time depen-
a
https://orcid.org/0000-0001-9202-519X
dency is particularly vital in applications with con-
trol constraints. It is a clear advantage in comparison
with some time-dependent approaches, such as the
trajectory tracking problem (Mazur and Cholewi
´
nski,
2016).
In the literature different approaches to the path
description can be met, namely the parametric meth-
ods (Mazur and Płaskonka, 2012; Liao et al., 2015)
and the non-parametric techniques (Morro et al.,
2011; Michałek and Gawron, 2018). The first ap-
proach is focused on a geometrical description of
a robot with respect to a moving reference object,
while the second one is a purely numerical analy-
sis of shapes and surfaces. In the paper the para-
metric approach is experimentally verified as it has
been eagerly considered in many applications, both
on the plane (Micaelli and Samson, 1993; Płaskonka,
2013; Domski and Mazur, 2018) and in the three-
dimensional space (Mazur et al., 2015; Cholewi
´
nski
and Mazur, 2019).
The most frequently considered curvilin-
ear parametrization method is the Serret–Frenet
parametrization. It allows one to describe a robot
with respect to a curve. In order to do so, a robot’s
guidance point needs to be projected onto the path.
608
Dyba, F.
Experimental Validation of the Non-Orthogonal Serret-Frenet Parametrization Applied to the Path Following Task.
DOI: 10.5220/0012164200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 608-615
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
Two approaches are distinguished: orthogonal and
non-orthogonal. The orthogonal projection (Dyba
and Mazur, 2023) is valid only locally and requires
finding the shortest distance between the controlled
robot and the path. In contrary, the non-orthogonal
projection is a global method. Although it requires
considering more control variables, it does not
introduce any additional constraints.
Due to that facts, the non-orthogonal Serret–
Frenet parametrization has been intensively investi-
gated (Mazur and Dyba, 2023). The algorithm has
been designed with the usage of the backstepping in-
tegrator method (Krsti
´
c et al., 1995), because of the
cascaded structure of the system.
In the paper an experimental validation of the
theoretically designed algorithm is presented. The
simulation study is validated with experiments on
a test–bed consisting of the KINOVA
®
Gen3 Ultra
lightweight robot. The gathered measurements are
compared in order to evaluate the practical usefulness
of the proposed control algorithm.
2 Serret–Frenet
PARAMETRIZATION
The most popular curvilinear parametrization was de-
fined in 19
th
century by Serret and Frenet. It is ea-
gerly used in many contemporary applications in var-
ious fields such as mathematics, physics, computer
graphics and also in robotics. This parametric de-
scription of a curve defines a local frame consisting
of three unit vectors: tangent to a curve T , normal to
a curve N , and binormal to a curve B. They span
an orthonormal basis in R
3
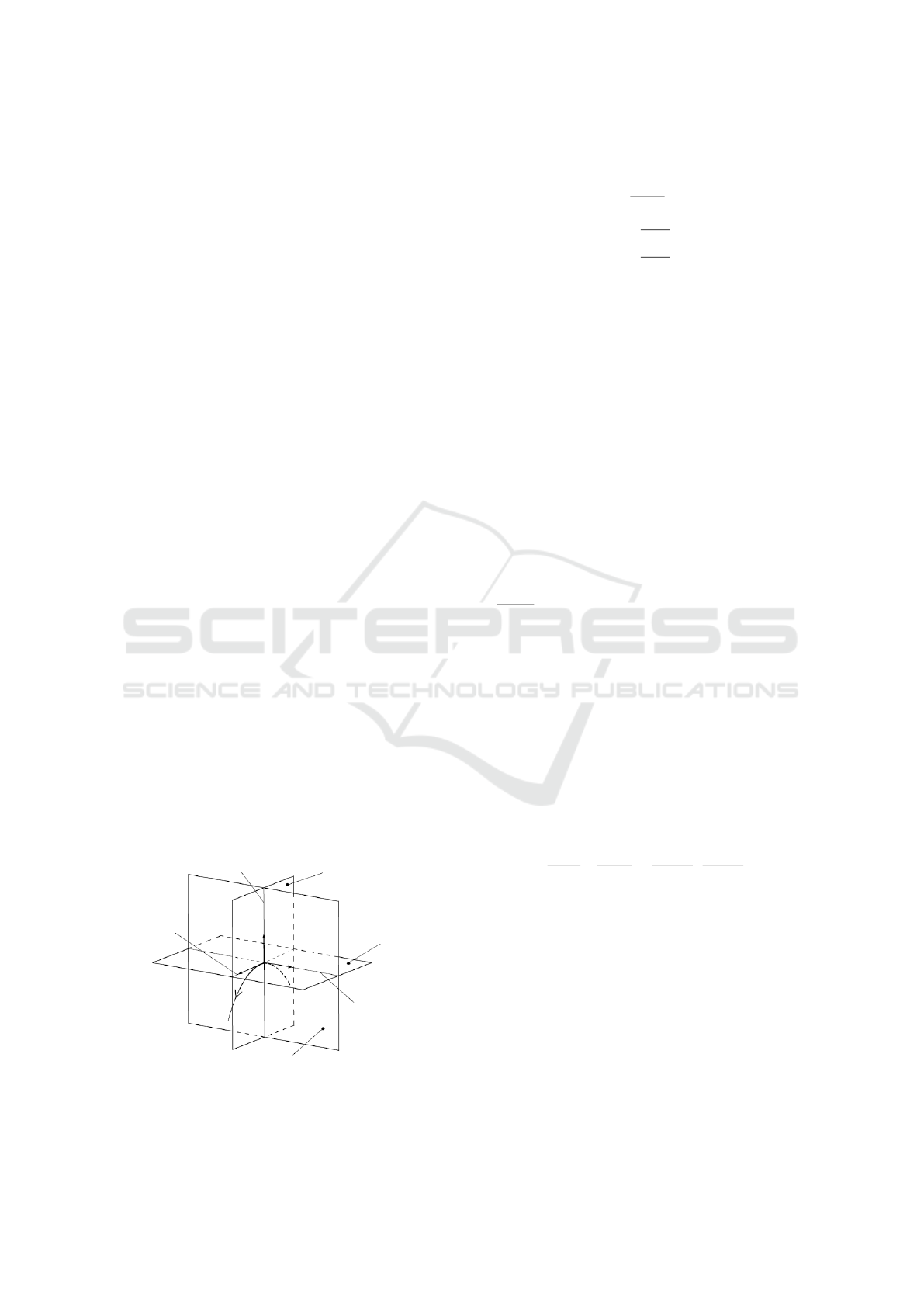
. The Serret–Frenet frame,
which is also frequently called the Frenet trihedron,
describes the curve geometry locally. Its visualization
is presented in Fig. 1. The base vectors of the Serret–
T
N
B
normal plane
main normal
straightening
plane
strictly tangent
plane
binormal
tangent
r(s)
Figure 1: Frenet trihedron.
Frenet frame are defined as follows (Oprea, 2007)
T (s) =
dr(s)
ds
, (1a)
N (s) =
dT (s)
ds
dT (s)
ds
, (1b)
B(s) = T (s) ×N (s), (1c)
where r(s) is the analytical description of a curve
in R
3
, and s is the so-called curvilinear distance. The
s parameter should be understood as the distance from
the assumed initial point of a curve to the current
point. Its value is equal to the length of a string placed
precisely along a curve (Dyba and Mazur, 2023).
The evolution of the Serret–Frenet frame fully de-
scribes the geometry of a curve. Let us define a ro-
tation matrix which consists of base vectors spanning
Frenet trihedron, i.e.
S(s) =
T (s) N(s) B(s)
, (2)
S ∈ SO(3) (Selig, 2005). Then, the frame evolution
is expressed with the equation (Oprea, 2007)
dS(s)
ds
=
T
T
(s)
N
T
(s)
B
T
(s)
T
0 −κ(s) 0
κ(s) 0 −τ(s)
0 τ(s) 0
=
= S(s)W (s), (3)
where κ is the curvature (the curve swerve from
a straight line), τ is the torsion (the curve swerve
from a plane), and W is the antisymmetric matrix,
i.e. W = −W
T
. It should be emphasized that the
frame evolution directly depends on the geometrical
invariants κ and τ, which are defined as (Mazur et al.,
2015)
κ(s) =
dT (s)
ds
, (4a)
τ(s) =
1
κ
2
(s)
dr(s)
ds
×
d
2
r(s)
ds
2
,
d
3
r(s)
ds
3
, (4b)
where ⟨·,·⟩ denotes a scalar product of vectors.
3 MATHEMATICAL MODEL OF
A ROBOT
In the paper a holonomic stationary manipulator is
taken into account. It is assumed that it is a redun-
dant robot. Hence, it has more than six degrees of
freedom, i.e. q ∈ R
n
, n > 6, where q is the vector of
the manipulator configuration consisting of joint po-
sitions.
Experimental Validation of the Non-Orthogonal Serret-Frenet Parametrization Applied to the Path Following Task
609

The position of the end-effector in the base frame
may be calculated according to the forward kinemat-
ics task (Spong and Vidyasagar, 1991)
p = k(q ) ∈R
3
. (5)
The position p will be referred to as the robot guid-
ance point. The end-effector velocities may be calcu-
lated from the equation
˙p
ω
= J(q) ˙q =
J
v
(q)
J
ω
(q)
˙q, (6)
where ˙p is the linear velocity of the end-effector, ω is
its angular velocity, and J (q) ∈ R
6×n
is the Jacobi
matrix which consists of submatrices J
v
,J
ω
∈ R
3×n
corresponding to transformations to linear and angu-
lar velocities, respectively. In the following sections
only the end-effector position and its linear velocity
will be considered. Hence, let us define the matrix J
v
J
v
(q) =
∂k(q)
∂q
. (7)
Dynamics of the manipulator is derived with
the usage of the Lagrange formalism (Siciliano and
Khatib, 2007) and the model is expressed as
M (q) ¨q + C( ˙q,q) ˙q + D(q) = u, (8)
where M (q) ∈ R
n×n
defines the inertia matrix,
C( ˙q,q) ∈R
n×n
is the matrix of Coriolis and centrifu-
gal forces, D(q) ∈ R
n
is the vector of gravity terms,
and u ∈R
n
denotes the generalized control forces ap-
plied to respective joints. In the model (8) other dy-
namics effects, such as friction, are neglected.
3.1 Robot Equations with Respect
to a Path
In order to describe a robot with respect to a path,
understood as a curve in R
3
space, the robot guid-
ance point P has to be projected onto the path. To do
so, the non-orthogonal projection may be harnessed.
Such a method is a global procedure and it does not
introduce any singularities in the robot description.
The point projected onto a path P
′
may be at any dis-
tance from the guidance point P, i.e. it may be located
ahead of the point P or behind it during the robot mo-
tion. The point P
′
is at a distance s from the initial
point of the curve, so it is also the origin point of
the Serret–Frenet frame associated with the path. The
idea of the non-orthogonal projection is presented in
Fig. 2. The X
0
Y
0
Z
0
frame is the global reference frame
which is identified with the manipulator base frame.
According to the notation in Fig. 2, the position
of the robot guidance point with respect to the local
Serret–Frenet frame is defined as
d = S
T
(p −r) =
d
1
d
2
d
3
T
. (9)
P
′
Z
0
X
0
Y
0
p
P
r
d
B
T
N
r
3
r
2
r
1
d
1
d
2
d
3
Figure 2: Non-orthogonal projection of the robot guidance
point P onto the curve r.
The robot kinematics with respect to the path is
derived by differentiating equation (9)
˙
d = S
T
( ˙p − ˙r) +
˙
S
T
(p −r). (10)
Let us notice that the element S
T
˙r defines the linear
velocity of the point P
′
in the Serret–Frenet reference
frame. Hence, the following relation holds
S
T
˙r =
T ,
dr
ds
N ,
dr
ds
B,
dr
ds
˙s
(1a)
=
˙s
0
0
. (11)
Moreover, it is true that
˙
S
T
(p −r) = ˙s
dS
T
ds
(p −r)
(3)
= ˙s (SW )
T
(p −r) =
= −˙sW S
T
(p −r)
(9)
= −˙sW d. (12)
As a result, equation (10) is reformulated taking into
account equations (6), (11) and (12)
˙
d = S
T
J
v
˙q −
˙s
0
0
− ˙sW d = L ˙q + F , (13)
where L = S
T
J
v
∈ R
3×n
, and F ∈ R
3
.
4 CONTROL PROBLEM
FORMULATION
The control problem is to enforce the motion of the
manipulator end-effector along a spatial path defined
in the robot workspace.
The following assumptions are made:
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
610

• the desired path is defined as a pure geometrical
object in R
3
space;
• the Serret–Frenet frame is well-defined in every
point of the path, so the curve is at least of C
3
class and has no zero-curvature points;
• the desired velocity profile of the Serret–Frenet
frame along the path is defined arbitrarily and
tracked during the manipulator motion;
• the considered manipulator is stationary, holo-
nomic and redundant;
• the manipulator kinematics is precisely known
and the robot operates outside the singular con-
figurations;
• parameters of the manipulator dynamics may re-
main unknown;
• only control of the end-effector position is consid-
ered.
It is worth noticing that tracking of the desired veloc-
ity profile along the path is a secondary subproblem.
The profile defines the motion of the Serret–Frenet
frame and does not violate the geometrical descrip-
tion of the path. It may be freely tuned regarding the
robot limitations.
It may be observed that the full model of the ma-
nipulator for the path following task consists of two
groups of equations:
1. Robot description with respect to the desired
path given by equation (13). That equation de-
fines constraints resulting from the desired mo-
tion along the path. The structure resembles the
1
st
order velocity constraints characteristic of non-
holonomic systems.
2. Manipulator dynamics given by equation (8).
The kinematic motion along the path cannot be per-
formed directly, but only by taking into account the
manipulator dynamics. Thus, it is clear that the sys-
tem has a cascade structure.
As a result, the backstepping integrator ap-
proach (Krsti
´
c et al., 1995) may be used for the con-
trol law design. The control cascade consists of two
stages:
1. Kinematic controller ˙q
ref
: generates reference ve-
locity profiles as though the dynamical part of the
model did not exist. The velocity profiles have to
satisfy constraints resulting from the desired path,
i.e. they guarantee motion of the end-effector
along the path by reducing the path following er-
ror e
d
to zero, e
d
→ 0.
2. Dynamic controller u: the reference velocity pro-
files cannot be performed directly on the manipu-
lator due the cascade structure. As a consequence,
a dynamic controller is required to follow the pro-
files generated on the previous level of the cas-
cade. Hence, the velocity profile following er-
ror ˙e
q
is defined.
A schematic view of the full control system is pre-
sented in Fig. 3.
4.1 Control Law
For the defined control system, the following kine-
matic controller is proposed
˙q
ref
= L
#
(
˙
d
d
−K
k
e
d
−F ), (14)
where d
d
is the desired position with respect to
the Serret–Frenet frame, e
d
= d − d
d
is the path
following error, K
k
is the positive-definite matrix,
and # denotes the Moore–Penrose pseudoinverse, i.e.
L
#
= L
T
(LL
T
)
−1
holds. In the closed feedback loop
the system (13) is described by the equation
˙e
d
+ K
k
e
d
= 0, (15)
which is clearly asymptotically stable with zero equi-
librium point for the positive-definite matrix K
k
.
Thus, the control law (14) meets the imposed require-
ments.
The velocity profile following error ˙e
q
considered
on the second stage of the control cascade is coupled
with the path following error e
d
and directly depends
on the error signal defined for the first stage of the
control cascade
˙e
q
(e
d
) = ˙q − ˙q
ref
= ˙q −L
#
(
˙
d
d
−K
k
e
d
−F ). (16)
For the second stage of the control cascade the dy-
namical PD controller, called the adaptive λ-tracking
algorithm, is used. The algorithm was introduced
in (Mazur and Schmid, 2000) and is defined by the
following equation
u = −K(t)E(t), (17)
where E(t) = K
d
˙e
q
(t) + K
p
e
q
(t), K
d
= diag{K
d
i
},
K
p
= diag{K
p
i
} are positive-definite matrices,
i = 1, ...,n, and the coefficient K is the gain which
adaptation is defined as
˙
K(t) =
(∥E(t)∥−λ) ·∥E(t)∥, ∥E(t)∥ > λ,
0, ∥E(t)∥ ≤ λ,
(18)
where λ > 0 is the arbitrarily chosen radius of the
dead zone, in which the adaptive gain is not increased.
The λ - tracking algorithm guarantees that the er-
ror signals are limited. In contrary to the classical
PD control law (Qu and Dorsey, 1991), the values of
the error bounds explicitly depend on the chosen con-
trol gains, which is a significant advantage. Accord-
ing to (Mazur and Schmid, 2000), the velocity profile
Experimental Validation of the Non-Orthogonal Serret-Frenet Parametrization Applied to the Path Following Task
611

Robot:
(13) & (8)
Dynamic
controller
Kinematic
controller
Desired
path
Velocity profile
along the path
u
q, ˙q
˙q
ref
r(s)
˙s
d
Figure 3: Scheme of the cascaded control system.
following errors ˙e
q
converge in the limit to a ball cen-
tred at 0. The ball radius for the i-th element of the
vector ˙e
q
is equal to the value of 2λ/K
d
i
.
Hence, the dynamic control law (17) guarantees
that the velocity profile following errors converge to
the predefined regions. As a consequence, the re-
quired precision for the velocity profile tracking is as-
sured and the path is satisfactory followed.
It is noteworthy that the presented dynamic con-
trol law may be applied when the structure of the ma-
nipulator dynamics is completely unknown. The con-
troller (17) does not require any knowledge of the pa-
rameters of the model (8).
5 CASE STUDY
The theoretical deliberations were verified with both
simulation and experimental studies
1
. In this section
the achieved results are compared.
The simulation study was conducted with the
MATLAB and SIMULINK environments. The exper-
imental test–bed used for the validation consisted
of the KINOVA
®
Gen3 Ultra lightweight robot (Ki-
nova inc., 2022), and a PC computer equipped with
the KINOVA
®
Kortex
™
software and the UBUNTU
®
operating system with the PREEMPT RT patches.
A schematic view of the laboratory test–bed is shown
in Fig. 4.
For both validation scenarios the same parameters
and conditions were assumed. A path in a shape of
a helix was followed. The helix is described with the
following equation (Oprea, 2007)
r(s) =
acos
s
c
asin
s
c
bs
c
T
, (19)
1
An animation of the simulation results and a video of
the experiment are available on the webpage: https://kcir.
pwr.edu.pl/
∼
fdyba/ICINCO/.
PC computer
KINOVA
®
robot
Ethernet
KINOVA
®
Kortex
™
RT Ubuntu
®
Figure 4: Scheme of the experimental test–bed.
where it was assumed that a = 0.5, b = 0.05 and
c =
√
a
2
+ b
2
. Moreover, the desired velocity pro-
file along the path was assumed as ˙s
d
= 0.25m/s.
The manoeuvre lasted 30s. The control gains were
equal to K
k
= diag
3×3
{50}, K
p
= diag
7×7
{5}, and
K
d
= diag
7×7
{5}. The radius of the dead zone was
equal to λ = 0.1 and the initial value of the gain adap-
tation was chosen as K(0) = 1. Finally, the chosen
initial configuration of the manipulator was equal in
degrees to
q
0
=
−1.34
87.65
−3.02
108.60
−1.54
−106.32
−87.16
. (20)
The manipulator in the initial state is presented in
Fig. 5.
The following figures show graphs comparing
simulation and experimental results. Firstly, in Fig. 6
the desired path is compared with the path performed
in both versions of the test. There are no observable
differences between the desired and executed paths.
However, at the beginning a slight deviation from the
given path may be noticed. For the real manipulator
the disturbance is even more significant. It may result
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
612
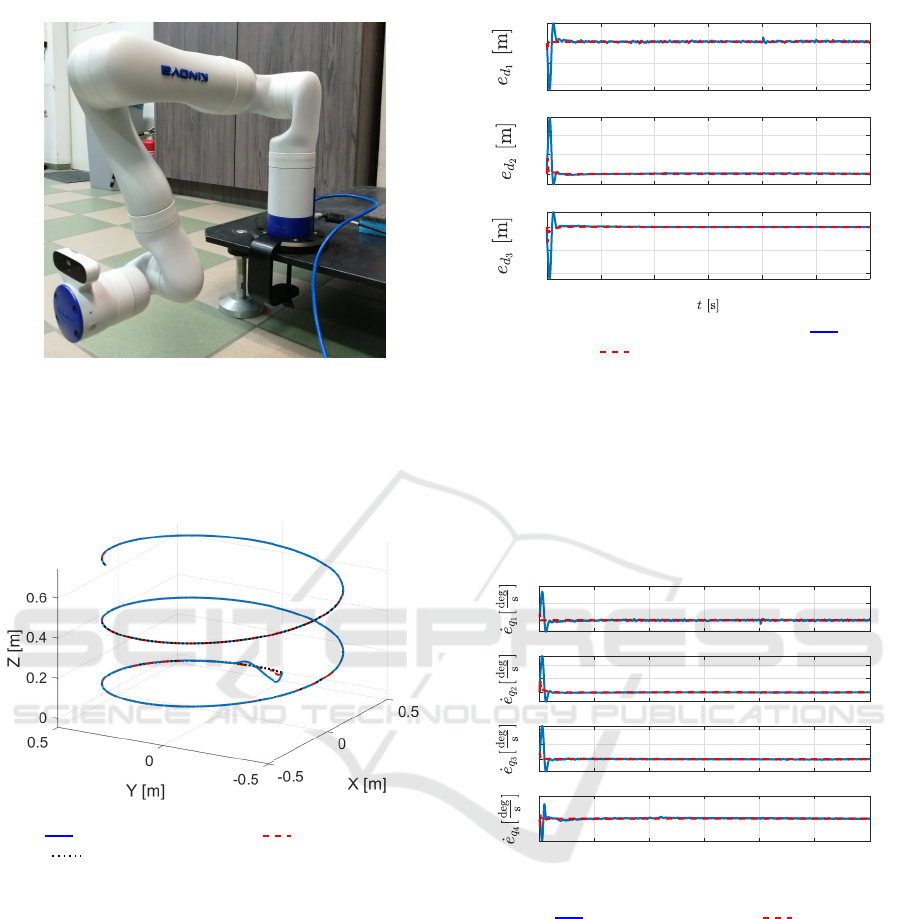
Figure 5: KINOVA
®
manipulator in the initial configuration.
from some mechanical issues independent from the
control algorithm performance. The disturbance was
quickly compensated by the control system in both
cases and the manipulator successfully followed the
desired path.
Figure 6: Path performed by the manipulator (blue
solid Experiment, red dashed Simulation, black
dotted Desired).
In Fig. 7 path following errors are shown. In-
deed, they reveal the greater deviation measured for
the physical object at the beginning of the manoeuvre.
It is noteworthy that the obtained precision of the mo-
tion is satisfactory. Although some noise oscillations
may be observed for the experimental case, the error
signals are of the order (0.1 −1)mm. It might result
from the limited precision of mechanical elements or
sensors. Nevertheless, such precision is sufficient for
autonomous path following or grasping manoeuvres.
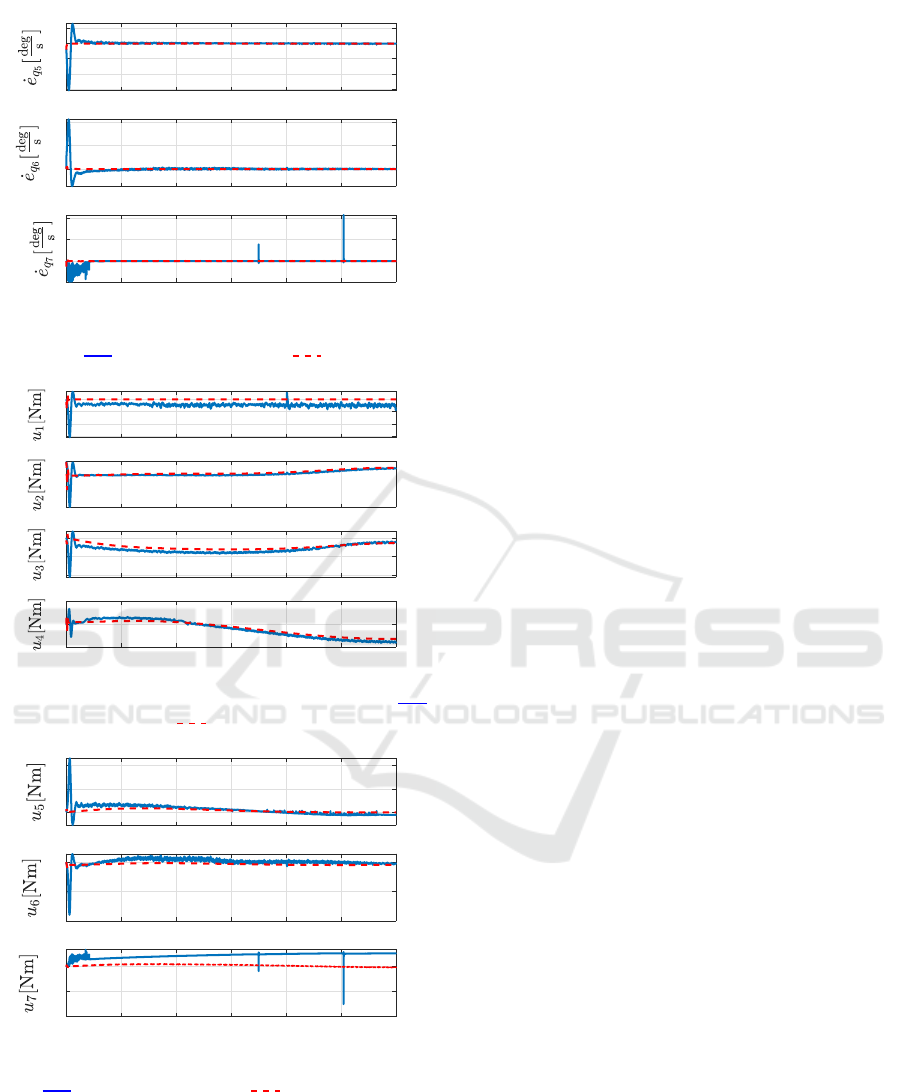
Furthermore, Figs. 8 and 9 present errors of
following velocity profiles in the large and small
joints (Kinova inc., 2022), respectively. It can be ob-
served that errors for the experimental case are higher
at the beginning of the manipulator movement. It re-
sults from the mentioned above disturbances. In addi-
0 5 10 15 20 25 30
-0.04
-0.02
0
0 5 10 15 20 25 30
0
0.01
0.02
0 5 10 15 20 25 30
-0.04
-0.02
0
Figure 7: Path following erros e
d
(blue solid Experi-
ment, red dashed Simulation).
tion, the transient state lasts longer. Nonetheless, after
a short period of time there are no significant differ-
ences between simulation and experimental results.
Moreover, all velocity profile following errors tend
towards the bounds resulting from the chosen control
parameters. After a certain time the values are kept
within the bounds. Hence, the end-effector correctly
follows positions defined by the helix equation (19).
0 5 10 15 20 25 30
0
100
200
0 5 10 15 20 25 30
0
100
200
0 5 10 15 20 25 30
0
50
100
0 5 10 15 20 25 30
t [s]
-50
0
50
Figure 8: Velocity profile following erros ˙e
q
for large joints
(blue solid Experiment, red dashed Simulation).
Finally, Figs. 10 and 11 present control torques
generated for the large and small joints, respectively.
In the transient state the values generated for the
physical manipulator are higher, although the signal
changes are not as rapid as for the simulation case.
In addition, some subtle differences may be observed
during the whole manoeuvre in every joint, especially
in the first one. It may result from the fact that in
the simulation case some factors were neglected, e.g.
friction forces. They appeared, though, in the exper-
imental case. However, despite the simplified model
in the simulation case, the obtained results do not dif-
fer significantly and the trend of the measurements is
maintained.
Experimental Validation of the Non-Orthogonal Serret-Frenet Parametrization Applied to the Path Following Task
613
0 5 10 15 20 25 30
-60
-40
-20
0
20
0 5 10 15 20 25 30
0
50
100
0 5 10 15 20 25 30
t [s]
0
1
2
Figure 9: Velocity profile following erros ˙e
q
for small joints
(blue solid Experiment, red dashed Simulation).
0 5 10 15 20 25 30
-30
-20
-10
0
0 5 10 15 20 25 30
-50
0
0 5 10 15 20 25 30
-20
-10
0
0 5 10 15 20 25 30
t [s]
-10
0
10
Figure 10: Control torques u for large joints (blue solid
Experiment, red dashed Simulation).
0 5 10 15 20 25 30
0
5
10
0 5 10 15 20 25 30
-20
-10
0
0 5 10 15 20 25 30
t [s]
-1
-0.5
0
Figure 11: Control torques u for small joints (blue
solid Experiment, red dashed Simulation).
All in all, the obtained experimental measure-
ments correspond with the simulation results. In spite
of the minor differences resulting from some mechan-
ical or implementation issues which arose on the lab-
oratory test–bed, the path was tracked correctly by
the real KINOVA
®
manipulator. Hence, it can be con-
cluded that the presented path following algorithm is
suitable for practical applications.
6 CONCLUSIONS
In the paper the path following algorithm has been
presented. It is based on two main aspects:
• the non-orthogonal Serret–Frenet parametrization
used for deriving the robot equations with respect
to the desired path (equations have the form of
a non-holonomic constraint);
• the backstepping integrator algorithm used for the
design of the control law.
The considered description is valid globally in ev-
ery point of a feasible path. Satisfying the equa-
tions resulting from the Serret–Frenet parametrization
guarantees correct path following. However, it can be
performed only via the manipulator dynamics.
As a consequence, the control system has a cas-
caded structure and the backstepping algorithm is
used to design two stages of the control cascade. The
proposed dynamic control law (the λ-tracking algo-
rithm) did not require any knowledge of the dynam-
ics parameters. However, the adaptively tuned control
gain guaranteed that the error converge to the prede-
fined region. This property allowed the robot to suc-
cessfully follow the path.
The presented algorithm has been validated with
the simulation and experimental studies. The simu-
lation results were more precise. In the experiment
a disturbance at the beginning of the manoeuvre and
some noise in the measurements were observed. The
differences may result from some mechanical issues,
delays in the transmission between the computer and
the manipulator on the experimental test–bed, or sim-
plifications of the simulation model. Nonetheless, the
discrepancies were not crucial for the successful com-
pletion of the control task — the desired path was fol-
lowed correctly. The gathered experimental measure-
ments confirmed that the designed algorithm can be
successfully applied to practical problems.
The results of the experiments indicate further re-
search directions. Firstly, the motion precision may
be improved. Although the achieved accuracy is sat-
isfactory for autonomous path following or even some
grasping manoeuvres, it might not be sufficient for
some operations such as milling. Thus, identification
of the dynamic structure of the manipulator may be
conducted in order to use a controller based on the
fully-known robot dynamics, or to consider some ne-
glected effects such as friction forces.
Secondly, it may be observed that the end-effector
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
614

orientation with respect to the Serret–Frenet frame
changes during the manoeuvre. Such a behaviour may
be unfavourable in grasping processes. Hence, not
only the position control, but also the orientation con-
trol should be taken into consideration.
Finally, the control constraints could be taken into
account in the control law. It will be especially impor-
tant if the end-effector is outside the path in the initial
state. It may prevent the control system from rapid
reactions in the transient state.
REFERENCES
Cholewi
´
nski, M. and Mazur, A. (2019). Path tracking by
the nonholonomic mobile manipulator. In 2019 12th
International Workshop on Robot Motion and Control
(RoMoCo), pages 203–208, Poznan, Poland.
Domski, W. and Mazur, A. (2018). Path tracking with or-
thogonal parametrization for a satellite with partial
state information. In Proceedings of the 15th Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics, volume 2, pages 252–257, Porto,
Portugal.
Dyba, F. and Mazur, A. (2023). Comparison of curviline-
ar parametrization methods and avoidance of orthogo-
nal singularities in the path following task. Journal of
Automation, Mobile Robotics and Intelligent Systems.
(In press).
Encarnac¸
˜
ao, P. and Pascoal, A. (2000). 3D path following
for autonomous underwater vehicle. In Proceedings of
the 39th IEEE Conference on Decision and Control,
pages 2977–2982, Sydney, NSW, Australia.
Hung, N., Rego, F., Quintas, J., Cruz, J., Jacinto, M.,
Souto, D., Potes, A., Sebastiao, L., and Pascoal, A.
(2023). A review of path following control strate-
gies for autonomous robotic vehicles: Theory, sim-
ulations, and experiments. Journal of Field Robotics,
40(3):747–779.
Kinova inc. (2022). Kinova Gen3 Ultra lightweight robot
user guide r8. Technical Report EN-UG-014-r8-
202210, Quebeck, Canada.
Krsti
´
c, M., Kanellakopoulos, I., and Kokotovi
´
c, P. V.
(1995). Nonlinear and Adaptive Control Design. John
Wiley & Sons, Inc., New York, USA.
Liao, Y.-L., Zhang, M.-J., and Wan, L. (2015). Serret–
Frenet frame based on path following control for un-
deractuated unmanned surface vehicles with dynamic
uncertainties. Journal of Central South University,
22:214–223.
Lugo-C
´
ardenas, I., Salazar, S., and Lozano, R. (2017).
Lyapunov Based 3D Path Following Kinematic Con-
troller for a Fixed Wing UAV. IFAC-PapersOnLine,
50(1):15946–15951. 20th IFAC World Congress.
Mazur, A. and Cholewi
´
nski, M. (2016). Implementation of
factitious force method for control of 5R manipulator
with skid-steering platform REX. Bulletin of the Pol-
ish Academy of Sciences Technical Sciences, 64(No.
1):71–80.
Mazur, A. and Dyba, F. (2023). The Non-orthogonal Serret–
Frenet Parametrization Applied to the Path Following
Problem of a Manipulator with Partially Known Dy-
namics. Archives of Control Sciences, 33(2):339–370.
Mazur, A. and Płaskonka, J. (2012). The Serret–Frenet
parametrization in a control of a mobile manipula-
tor of (nh, h) type. IFAC Proceedings Volumes,
45(22):405–410. 10th IFAC Symposium on Robot
Control.
Mazur, A., Płaskonka, J., and Kaczmarek, M. (2015). Fol-
lowing 3D paths by a manipulator. Archives of Control
Sciences, 25(1):117–133.
Mazur, A. and Schmid, C. (2000). Adaptive λ-tracking for
rigid manipulators. In Morecki, A., Bianchi, G., and
Rzymkowski, C., editors, Romansy 13. Theory and
practice of robots and manipulators., pages 103–112,
Vienna. Springer Vienna.
Mazur, A. and Szakiel, D. (2009). On path following con-
trol of nonholonomic mobile manipulators. Interna-
tional Journal of Applied Mathematics and Computer
Science, 19(4):561–574.
Micaelli, A. and Samson, C. (1993). Trajectory tracking for
unicycle-type and two-steering-wheels mobile robots.
In Technical Report No. 2097, Sophia-Antipolis.
Michałek, M. M. and Gawron, T. (2018). VFO path follow-
ing control with guarantees of positionally constrained
transients for unicycle-like robots with constrained
control input. Journal of Intelligent and Robotic Sys-
tems: Theory and Applications, 89(1-2):191 – 210.
Morro, A., Sgorbissa, A., and Zaccaria, R. (2011). Path fol-
lowing for unicycle robots with an arbitrary path cur-
vature. IEEE Transactions on Robotics, 27(5):1016–
1023.
Oprea, J. (2007). Differential Geometry and Its Appli-
cations. Prentice Hall, Washington, Cleveland State
University.
Płaskonka, J. (2013). Different kinematic path following
controllers for a wheeled mobile robot of (2,0) type.
Journal of Intelligent & Robotic Systems, 77:481–498.
Qu, Z. and Dorsey, J. (1991). Robust tracking control of
robots by a linear feedback law. IEEE Transactions
on Automatic Control, 36(9):1081–1084.
Rokonuzzaman, M., Mohajer, N., Nahavandi, S., and Mo-
hamed, S. (2021). Review and performance evaluation
of path tracking controllers of autonomous vehicles.
IET Intelligent Transport Systems, 15(5):646–670.
Selig, J. M. (2005). Geometric Fundamentals of Robotics.
Springer New York, NY, 2
nd
edition.
Siciliano, B. and Khatib, O. (2007). Handbook of Robotics.
Springer-Verlag, Berlin, Heidelberg.
Spong, M. and Vidyasagar, M. (1991). Robot Dynamics and
Control. John Wiley & Sons, Inc., New York.
Experimental Validation of the Non-Orthogonal Serret-Frenet Parametrization Applied to the Path Following Task
615
